







专利摘要
本发明公开了一种轨道车辆用超偏载检衡车,包括车体、起重装置和按照预设阵列摆放于所述车体的车厢内的多个砝码,起重装置设置于车厢内用于起吊并移动任一砝码至指定位置,以模拟轨道车辆的超载和偏载工况。其工作过程,首先,将该超偏载检衡车驶入轨道车辆用超偏载轨道衡上,此时车厢内多个砝码总重与货车允许载重量相等;然后,用起重装置相对于车厢纵向中心线左右移动砝码,来模拟轨道车辆偏载工况;同理,用起重装置相对于车厢的横向中心线前后移动砝码,来模拟轨道车辆超载工况,再根据所移动的砝码的重量与超偏载轨道衡实际检测值差值来调整检衡仪器,以补偿超偏载轨道衡的检测误差,从而提高超偏载轨道衡的检测精度。
权利要求
1.一种轨道车辆用超偏载检衡车,其特征在于,包括车体、起重装置和按照预设阵列摆放于所述车体的车厢内的多个砝码(BW),所述起重装置设置于所述车厢内用于起吊并移动任一所述砝码(BW)至指定位置,以模拟所述轨道车辆的超载和超偏载工况。
2.如权利要求1所述的超偏载检衡车超偏载检衡车,其特征在于,多个所述砝码(BW)通过砝码定位机构摆放于所述车厢内,所述砝码定位机构包括与所述车厢体底板(12)形状相匹配的方形边框,以及将所述方形边框分隔成多个砝码格(CE)的横向隔板(TB)和纵向隔板(LB),多个所述砝码格(CE)相对于所述车厢(C)的纵向中心线和横向中心线对称分布。
3.如权利要求2所述的超偏载检衡车,其特征在于,所述方形边框的每个边框均包括固定连接的高内立板(FL1)、低外立板(FL2)和水平顶板(FL3),以及与所述水平顶板(11)(FL3)上表面和所述高内立板(FL1)外表面两者固连的多个加强筋(FL4),多个所述加强筋(FL4)沿纵向依次间隔设置。
4.如权利要求2所述的超偏载检衡车,其特征在于,所述砝码(BW)和所述砝码格(CE)通过相适配的定位柱(CE1)和定位孔(BW1)定位,所述定位柱(CE1)和所述定位孔(BW1)中一者设置于所述砝码(BW),另一者设置于所述砝码格(CE)。
5.如权利要求1至4任一项所述的超偏载检衡车,其特征在于,所述起重装置包括;
两个轨道(75),沿纵向延伸并分别固连于所述车厢(C)的两个侧板上;
主体(1),通过行走机构可沿所述轨道(75)移动;
伸缩起吊臂(2),通过回转机构可转动地连接于所述主体(1);
伸缩机构,用于驱动所述伸缩起吊臂(2)内的节臂相对伸缩;
吊钩(3),通过起升机构可升降地连接于所述伸缩起吊臂(2)上。
6.如权利要求5所述的超偏载检衡车,其特征在于,每个所述轨道(75)通过多个支承架(SF)固连于相应所述侧板上,多个所述支承架(SF)沿纵向依次间隔设置;所述支承架(SF)包括与相应所述侧板固连的水平支承板(SF1)和斜支承板(SF2),所述斜支承板(SF2)位于所述水平支承板(SF1)下方并与所述水平支承板(SF1)的自由端固连。
7.如权利要求5所述的超偏载检衡车,其特征在于,所述起重装置还包括固连于所述轨道(75)前后两端的止挡件(SB),以防止所述主体(1)脱轨;所述止挡件(SB)包括相互固连的止挡立板(SB1)和止挡块(SB2),所述止挡立板(SB1)固连于所述轨道(75)的上表面。
8.如权利要求5所述的超偏载检衡车,其特征在于,所述车厢(C)具有侧门和/或端门,所述伸缩起吊臂(2)可由所述侧门或所述端门伸出至所述车厢(C)外。
9.如权利要求8所述的超偏载检衡车,其特征在于,所述侧门和所述端门中至少一者为塞拉门,所述塞拉门包括门体(81)及门体锁定装置(83),所述门体锁定装置(83)通过手柄(831)驱动,以使所述门体(81)与所述车厢(C)锁定;所述塞拉门还包括手柄锁定装置(84),其具有锁定和解锁两种工作状态,在锁定状态,所述手柄锁定装置(84)限制所述手柄(831)转动;在解锁状态,所述手柄(831)可自由转动。
10.如权利要求9所述的超偏载检衡车,其特征在于,所述手柄锁定装置(84)包括相互连接的限位部(841)和底座(842),所述底座(842)固定于所述门体(81);
在锁定状态,所述限位部(841)与所述底座(842)锁定,在锁定位置,所述限位部(841)限制所述手柄(831)转动,在解锁状态,所述限位部(841)可相对于所述底座(842)移动或转动,以解除对所述手柄(831)转动的限制。
11.如权利要求10所述的超偏载检衡车,其特征在于,所述限位部(841)铰接于所述底座(842),且所述限位部(841)与所述底座(842)分别开设第一锁孔(8431)和第二锁孔(8441);
所述手柄锁定装置(84)还包括锁头,在锁定状态,所述第一锁孔(8431)与所述第二锁孔(8441)相互重合,以使所述锁头通过所述第一锁孔(8431)与所述第二锁孔(8441)锁定。
12.如权利要求11所述的超偏载检衡车,其特征在于,所述限位部(841)设有第一吊耳(843),所述第一吊耳(843)开设所述第一锁孔(8431),所述底座(842)设有第二吊耳(844),所述第二吊耳(844)开设所述第二锁孔(8441)。
13.如权利要求12所述的超偏载检衡车,其特征在于,所述限位部(841)包括相互焊接的固定板(8411)和U型板(8412),所述固定板(8411)与所述底座(842)铰接,且所述第一吊耳(843)设于所述固定板(8411);
在锁定状态,所述手柄(831)的一端位于所述U型板(8412)的U型槽内,且所述U型板(8412)的两侧壁限制所述手柄(831)转动。
14.如权利要求11所述的超偏载检衡车,其特征在于,所述限位部(841)与所述底座(842)的两侧分别开设相互连通的安装孔,所述安装孔内设有销轴(845),以使所述限位部(841)绕所述销轴(845)旋转,且所述销轴(845)通过开口销(846)锁定。
15.如权利要求9所述的超偏载检衡车,其特征在于,所述车厢(C)的门框(82)与所述门体(81)的门柱(811)连接,且所述门柱(811)的截面与所述门框(82)的截面为相互配合的梯形;
所述门框(82)与所述门柱(811)之间设置密封条(821)。
16.如权利要求15所述的超偏载检衡车,其特征在于,所述门框(82)设有朝向所述门柱(811)的挡块(822)。
17.如权利要求5所述的超偏载检衡车,其特征在于,所述伸缩起吊臂(2)至少包括三节臂,所述伸缩机构包括用于驱动相邻内节臂相对于最外层节臂伸缩的驱动单元和驱动每相邻三个节臂相对伸缩的伸出组件和缩回组件,所述伸出组件包括伸出滑轮(41)和伸出牵拉件(41),所述缩回组件包括缩回滑轮(44)和缩回牵拉件(43);
相邻三个节臂的中间节臂的前端和后端分别可转动地连接有所述伸出滑轮(41)和的所述缩回滑轮(44),所述伸出牵拉件(41)的两端部分别与相邻三个节臂的外节臂和内节臂两者连接并由所述伸出滑轮(41)张紧,缩回牵拉件(43)的两端部同样分别与相邻三个节臂的外节臂和内节臂两者连接并由所述缩回滑轮(44)张紧。
18.如权利要求17所述的超偏载检衡车,其特征在于,所述伸出组件和所述缩回组件均为相对于所述伸缩起吊臂(2)的伸长方向左右对称设置的两组。
19.如权利要求17所述的超偏载检衡车,其特征在于,所述驱动单元包括相互啮合的齿轮(45)和齿条(46)以及固连于所述最外层节臂的电机(M),所述齿轮(45)固连于所述电机(M)的电枢轴,所述齿条(46)固连于所述最外层节臂相邻的内节臂上,所述最外层节臂开设有沿所述齿条(46)和齿轮(45)啮合方向延伸的滑槽(A)。
20.如权利要求17所述的超偏载检衡车,其特征在于,所述伸出牵拉件(41)和/或所述缩回牵拉件(43)具体为链条。
21.如权利要求17所述的超偏载检衡车,其特征在于,所述回转机构包括电机(M)和回转支承(51),所述回转支承(51)的内圈通过主体连接法兰(52)与所述主体(1)固连,其外圈通过伸缩起吊臂连接法兰(53)与所述伸缩起吊臂(2)固连,所述电机(M)驱动所述伸缩起吊臂(2)回转。
22.如权利要求17所述的超偏载检衡车,其特征在于,所述起重装置还包括行走机构,所述行走机构包括可转动地设置于所述主体(1)上的多个行走轮(71)以及驱动所述行走轮(71)沿所述轨道(75)移动的驱动件。
23.如权利要求22所述的超偏载检衡车,其特征在于,所述主体(1)包括固连的顶板(11)、底板(12)和四个U字型槽钢(13),四个所述U字型槽钢(13)均分为沿所述轨道(75)长度方向左右对称设置的两组,每组中两个所述U字型槽钢(13)间隔设置且槽口横向朝外,所述行走轮(71)可转动地连接于两个所述U字型槽钢(13)。
24.如权利要求22所述的超偏载检衡车,其特征在于,所述行走机构还包括多个防滚轮(74),所述防滚轮(74)可转动地连接于所述主体(1)上并与所述轨道(75)的下限位面相抵。
25.如权利要求17所述的超偏载检衡车,其特征在于,所述起升机构包括起吊绳(61)、可转动地连接于所述最外层节臂的卷筒(62)和驱动所述卷筒(62)转动的驱动件,所述起吊绳(61)的一端固连并卷绕于所述卷筒(62),另一端绕过设置于所述最外层节臂和最内层节臂的导向轮(G)并穿过开设于所述最内层节臂的起吊绳穿过孔、绕过所述吊钩(3)的导向轮(G)与所述最外层节臂固连;所述最外层节臂和中间节臂具有容置所述起吊绳(61)的滑槽(A)。
说明书
技术领域
本发明涉及检定轨道车辆超偏载检测装置技术领域,特别涉及一种轨道车辆用超偏载检衡车。
背景技术
铁路轨道衡属于计量衡器,分为静态轨道衡、动态轨道衡及超偏载检测装置。静态轨道衡主要用于称量钢材等重物品的重量,工作时车辆静止状态停放在静态轨道衡上进行精确测量货物重量;动态轨道衡主要用于称量煤炭等大宗货物的重量,车辆动态通过动态轨道衡检测货物重量;超偏载检测装置为安全检测装备,车辆动态通过超偏载检测装置,检测货物是否超载(车辆前后转向架载荷不同为超载)、偏载(货物重心与车辆重心横向不重合为偏载),以便从源头消除隐患,以保障货车安全运行。
铁路轨道衡需要定期进行检定,静态检衡车用于检定静态轨道衡,动态检衡车用于检定动态轨道衡,然而检定超偏载轨道衡的技术尚属空白。
有鉴于此,如何检定轨道车辆的超偏载轨道衡,是本领域技术人员亟待解决的技术问题。
发明内容
为了解决上述技术问题,本发明的核心目的在于,提供一种轨道车辆用超偏载检衡车,标定超偏载轨道衡。
一种轨道车辆用超偏载轨道衡超偏载检衡车,其特征在于,包括车体、起重装置和按照预设阵列摆放于所述车体的车厢内的多个砝码,所述起重装置设置于所述车厢内用于起吊并移动任一所述砝码至指定位置,以模拟所述轨道车辆的超载和偏载工况。
这种超偏载检衡车的工作过程是:首先,将该超偏载检衡车驶入轨道车辆用超偏载轨道衡上,此时车厢内多个砝码总重与货车允许载重量相等;然后,用起重装置相对于车厢纵向中心线左右移动砝码,来模拟轨道车辆偏载工况;同理,用起重装置相对于车厢的横向中心线前后移动砝码,来模拟轨道车辆超载工况,再根据所移动的砝码的重量与超偏载轨道衡实际检测值差值来调整检衡仪器,以补偿超偏载轨道衡自身结构或外界因素造成的检测误差,从而提高超偏载轨道衡的检测精度。
可选地,多个所述砝码通过砝码定位机构摆放于所述车厢内,所述砝码定位机构包括与所述车厢体底板形状相匹配的方形边框,以及将所述方形边框分隔成多个砝码格的横向隔板和纵向隔板,多个所述砝码格相对于所述车厢的纵向中心线和横向中心线对称分布。
可选地,所述方形边框的每个边框均包括固定连接的高内立板、低外立板和水平顶板,以及与所述水平顶板上表面和所述高内立板外表面两者固连的多个加强筋,多个所述加强筋沿纵向依次间隔设置。
可选地,所述砝码和所述砝码格通过相适配的定位柱和定位孔定位,所述定位柱和所述定位孔中一者设置于所述砝码,另一者设置于所述砝码格。
可选地,所述起重装置包括;
两个轨道,沿纵向延伸并分别固连于所述车厢的两个侧板上;
主体,通过行走机构可沿所述轨道移动;
伸缩起吊臂,通过回转机构可转动地连接于所述主体;
伸缩机构,用于驱动所述伸缩起吊臂内的节臂相对伸缩;
吊钩,通过起升机构可升降地连接于所述伸缩起吊臂上。
可选地,每个所述轨道通过多个支承架固连于相应所述侧板上,多个所述支承架沿纵向依次间隔设置;所述支承架包括与相应所述侧板固连的水平支承板和斜支承板,所述斜支承板位于所述水平支承板下方并与所述水平支承板的自由端固连。
可选地,所述起重装置还包括固连于所述轨道前后两端的止挡件,以防止所述主体脱轨;所述止挡件包括相互固连的止挡立板和止挡块(SB2),所述止挡立板固连于所述轨道的上表面。
可选地,所述车体具有侧门和/或端门,所述伸缩起吊臂可由所述侧门或所述端门伸出至所述车厢外。
可选地,所述侧门和所述端门中至少一者为塞拉门,所述塞拉门包括门体及门体锁定装置,所述门体锁定装置通过手柄驱动,以使所述门体与所述车厢锁定;所述塞拉门还包括手柄锁定装置,其具有锁定和解锁两种工作状态,在锁定状态,所述手柄锁定装置限制所述手柄转动;在解锁状态,所述手柄可自由转动。
可选地,所述手柄锁定装置包括相互连接的限位部和底座,所述底座固定于所述门体;
在锁定状态,所述限位部与所述底座锁定,在锁定位置,所述限位部限制所述手柄转动,在解锁状态,所述限位部可相对于所述底座移动或转动,以解除对所述手柄转动的限制。
可选地,所述限位部铰接于所述底座,且所述限位部与所述底座分别开设第一锁孔和第二锁孔;
所述手柄锁定装置还包括锁头,在锁定状态,所述第一锁孔与所述第二锁孔相互重合,以使所述锁头通过所述第一锁孔与所述第二锁孔锁定。
可选地,所述限位部设有第一吊耳,所述第一吊耳开设所述第一锁孔,所述底座设有第二吊耳,所述第二吊耳开设所述第二锁孔。
可选地,所述限位部包括相互焊接的固定板和U型板,所述固定板与所述底座铰接,且所述第一吊耳设于所述固定板;
在锁定状态,所述手柄的一端位于所述U型板的U型槽内,且所述U型板的两侧壁限制所述手柄转动。
可选地,所述限位部与所述底座的两侧分别开设相互连通的安装孔,所述安装孔内设有销轴,以使所述限位部绕所述销轴旋转,且所述销轴通过开口销锁定。
可选地,所述车厢的门框与所述门体的门柱连接,且所述门柱的截面与所述门框的截面为相互配合的梯形;
所述门框与所述门柱之间设置密封条。
可选地,所述门框设有朝向所述门柱的挡块。
可选地,所述伸缩起吊臂至少包括三节臂,所述伸缩机构包括用于驱动相邻内节臂相对于最外层节臂伸缩的驱动单元和驱动每相邻三个节臂相对伸缩的伸出组件和缩回组件,所述伸出组件包括伸出滑轮和伸出牵拉件,所述缩回组件包括缩回滑轮和缩回牵拉件;
相邻三个节臂的中间节臂的前端和后端分别可转动地连接有所述伸出滑轮和的所述缩回滑轮,所述伸出牵拉件的两端部分别与相邻三个节臂的外节臂和内节臂连接并由所述伸出滑轮张紧,缩回牵拉件的两端部同样分别与相邻三个节臂的外节臂和内节臂连接并由所述缩回滑轮张紧。
可选地,所述伸出组件和所述缩回组件均为相对于所述伸缩起吊臂的伸长方向左右对称设置的两组。
可选地,所述驱动单元包括相互啮合的齿轮和齿条以及固连于所述最外层节臂的电机以及,所述齿轮固连于所述电机的电枢轴,所述齿条固连于所述最外层节臂相邻的内节臂上,所述最外层节臂开设有沿所述齿条和齿轮啮合方向延伸的滑槽。
可选地,所述伸出牵拉件和/或所述缩回牵拉件具体为链条。
可选地,所述回转机构包括电机和回转支承,所述回转支承的内圈通过主体连接法兰与所述主体固连,其外圈通过伸缩起吊臂连接法兰与所述伸缩起吊臂固连,所述电机驱动所述伸缩起吊臂回转。
可选地,所述起重装置还包括行走机构,所述行走机构包括可转动地设置于所述主体上的多个行走轮以及驱动所述行走轮沿所述轨道移动的驱动件。
可选地,所述主体包括固连的顶板、底板和四个U字型槽钢,四个所述U字型槽钢均分为沿所述轨道长度方向左右对称设置的两组,每组中两个所述U字型槽钢间隔设置且槽口横向朝外,所述行走轮可转动地连接于两个所述U字型槽钢。
可选地,所述行走机构还包括多个防滚轮,所述防滚轮可转动地连接于所述主体上并与所述轨道的下限位面相抵。
可选地,所述起升机构包括起吊绳、可转动地连接于所述外节臂的卷筒和驱动所述卷筒转动的驱动件,所述起吊绳的一端固连并卷绕于所述卷筒,另一端绕过设置于所述最外层节臂和最内层节臂的导向轮并穿过开设于所述最内层节臂的起吊绳穿过孔、绕过所述吊钩的导向轮与所述最外层节臂固连;所述最外层节臂和其余中间节臂具有容置所述起吊绳的滑槽。
附图说明
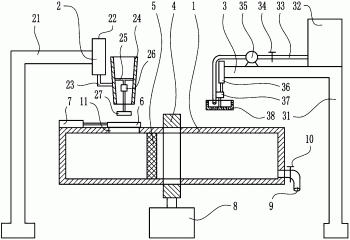
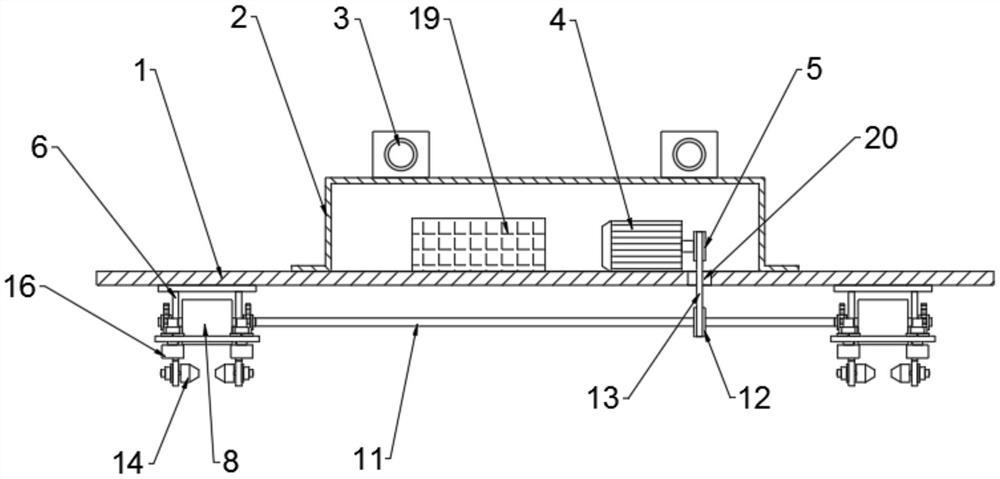
图1示出了本发明所提供超偏载检衡车具体实施方式的主视结构示意图;
图2示出了图1中所示超偏载检衡车的侧视图;
图3示出了砝码定位机构内砝码的排布阵列结构示意图;
图4和图5分别示出了图3的A-A和B-B向剖视结构示意图;
图6和图7示出了起重装置的主视和侧视结构示意图;
图8示出了图6的A-A向断面结构示意图;
图9示出了轨道和车厢的装配体的主视结构示意图;
图10和图11分别示出了图9的A-A和B-B向剖视结构示意图;
图12示出了图11的C处局部放大结构示意图;
图13示出了图10的D处局部放大结构示意图;
图14至图16分别示出了轨道、主体和行走机构三者装配体的主视、俯视和侧视结构示意图;
图17和图18分别示出了主体、伸缩起吊臂和伸缩机构三者装配体的主视和侧视结构示意图;
图19至图21分别示出了图17的A-A、B-B和C-C向断面结构示意图;
图22和图23分别示出了外节臂的主视和俯视结构示意图;
图24示出了图22的A-A向剖视结构示意图;
图25至图27分别示出了内节臂的主视、仰视和俯视结构示意图;
图28和图29分别示出了图25的A-A和B-B向断面结构示意图;
图30和图31分别示出了主体、伸缩起吊臂和回转机构的具体机构以及三者的装配体的主视和俯视结构示意图;
图32示出了吊钩、伸缩起吊臂和起升机构三者装配体的主视结构示意图;
图33和图34分别示出了内节臂的主视和仰视结构示意图;
图35示出了图33的A-A向剖视结构示意图;
图36示出了本发明所提供塞拉门的结构示意图;
图37示出了图36中手柄锁定装置解锁状态的结构示意图;
图38示出了图36中手柄锁定装置锁定状态的结构示意图;
图39示出了手柄锁定装置解锁手柄的结构示意图;
图40示出了手柄锁定装置锁定手柄的结构示意图;
图41示出了图36的俯视图;
图42示出了图41中Ⅰ部分的局部放大图;
图43示出了图41中门框与门柱配合的结构示意图。
图1和图43中附图标记与各个部件名称之间的对应关系:
C车厢;
X转向架机构;
BW砝码:BW1定位孔;
砝码定位机构:FF前边框、FB后边框、FR右边框、FL左边框(FL1高内立板、FL2低外立板、FL3水平顶板、FL4加强筋)、LB纵向隔板、TB横向隔板、CE砝码格、CE1定位柱;
SF支承架:SF1水平支承板、SF2斜支承板;
SB止挡件:SB1止挡立板、SB2止挡块;
SE起重装置:
1主体:11顶板、12底板、13U字型槽钢;
2伸缩起吊臂:21外节臂、22中间节臂、22a轴孔、23内节臂、23a起吊绳穿过孔、A滑槽、S滑块、T滚轮;
3吊钩;
伸缩机构:41伸出牵拉件、42伸出滑轮、43缩回牵拉件、44缩回滑轮、45齿轮、46齿条、47电机连接板、M电机;
回转机构:51回转支承、52主体连接法兰、53伸缩起吊臂连接法兰;
起升机构:61起吊绳、62卷筒、G导向轮、M电机;
行走机构:71行走轮、72传动轴、73联轴器、74防滚轮、75轨道、M电机;
塞拉门:
81门体、811门柱、82门框、821密封条、822挡块;
83门体锁定装置、831手柄;
84手柄锁定装置、841限位部、8411固定板、8412U型板、842底座、843第一吊耳、8431第一锁孔、844第二吊耳、8441第二锁孔、845销轴、846开口销。
具体实施方式
本发明的核心在于,提供一种轨道车辆用超偏载检衡车,来标定超偏载轨道衡以提高其检测精度。
为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。需要说明的是,本文所述的前后、上下、左右等方位均以轨道车辆为参照,以与轨道车辆行驶方向平行的方向为纵向,在纵向上,行驶方向所指向的方向为前,与行驶方向相背的方向为后;在平行于轨道车辆运行轨道面的平面内,垂直于纵向的方向为横向,在横向上,沿行驶方向看,处于左手边的方向为左,处于右手边的方向为右;以垂直于轨道车辆运行轨道面的方向为垂向,在垂向上,靠近轨道面的方向为下,远离轨道面的方向为上。另外,说明书附图的图1中箭头“←”代表轨道车辆的行驶方向。
请参见图1至图3,其中,图1示出了本发明所提供超偏载检衡车具体实施方式的主视结构示意图,图2示出了图1中所示超偏载检衡车的侧视图,图3示出了砝码定位机构内砝码的排布阵列结构示意图。
如图1至图3所示,轨道车辆用超偏载轨道衡的超偏载检衡车包括车体、多个砝码BW和起重装置SE,其中,车体包括车厢C和转向架机构X,转向架机构X与车厢C连接以带动车厢C移动,多个砝码BW按预定阵列摆放于车厢C内,起重装置设置于车厢C内用于将任一砝码BW移动至指定位置,以模拟轨道车辆超载和/或偏载工况。
这种超偏载检衡车的工作过程是:首先,将该超偏载检衡车驶入轨道车辆用超偏载轨道衡上,此时车厢C内多个砝码BW总重与货车允许载重量相等;然后,用起重装置相对于车厢C纵向中心线左右移动砝码BW,来模拟轨道车辆偏载工况;同理,用起重装置相对于车厢C的横向中心线前后移动砝码BW,来模拟轨道车辆超载工况,再根据所移动的砝码BW的重量与超偏载轨道衡实际检测值差值来调整检衡仪器,以补偿超偏载轨道衡自身结构或外界因素造成的检测误差,从而提高超偏载轨道衡的检测精度。
接下来,结合说明书附图对该超偏载检衡车的各个组件的结构及工作原理逐一详细说明。
结合图1和2可知,车厢C与现有轨道车辆货车车厢相似,包括固连的车顶板、车底板、前端板、后端板、左侧板和右侧板。。另外,转向架与车厢C的连接方式与现有轨道车辆相同,本领域技术人员基于现有技术完全可以实现,故而本文在此不再赘述。
如图3所示,多个砝码BW通过砝码定位机构按照预定阵列摆放在车厢C底板上。砝码定位机构包括前边框FF、左边框FL、后边框FB、右边框FR、多个横向隔板TB和多个纵向隔板LB。其中,这四个边框依次固连围合形成与车厢C底板形状相适配的长方形边框,该长方形边框的长度方向沿纵向延伸。多个横向隔板TB和多个纵向隔板LB将该长方形框架内部分割成3纵行×18横列阵列分布的54个砝码格CE,这54个砝码格CE相对于车厢C的横向中心线和纵向中心线均对称布置。
需要说明的是,本具体实施方式中砝码格CE具体数量及排布方式仅是示意说明了砝码BW的一种阵列方式,在满足正常承载状态且车厢C内砝码BW总重沿车厢C的横向中心线和纵向中心线均对称排布的前提下,根据车型和每个砝码BW的重量,本领域技术人员可对砝码BW排布阵列进行适应性调整。
进一步,砝码定位机构的前边框FF、左边框FL、后边框FB和右边框FR均为多个板件拼装而成的框架结构。砝码定位机构的四个边框结构基本相同,现结合如图4和图5图,以左边框FL为例来说明这四个边框的结构,其中,4和图5分别示出了图3的A-A和B-B向剖视结构示意图。
如图4,左边框FL包括由高内立板FL1、低外立板FL2和水平顶板FL3围合形成的方形框架,以及与水平顶板FL3上表面和高内立板FL1外表面固定连接并沿纵向上依次间隔设置的多个加强筋FL4。
可以理解,这样采用多个板件拼装而成边框具有加工工艺简单且强度高的特点,还可承受较大的冲击载荷,从而可保证砝码BW排布的安全性和可靠性。
更进一步地,每个砝码格CE和相应地砝码BW通过相适配的定位柱CE1和定位孔BW1定位,具体地,如图5所示,砝码BW底部具有至少两个定位孔BW1,相应地砝码格CE的底部固连有与之相适配且对应设置的定位柱CE1,砝码BW通过该定位孔BW1和定位柱CE1摆放于砝码格CE内。如此设置,既可可提高砝码BW的摆放效率又可防止检测过程砝码BW的窜动,在一定程度上可提高检测精度。
可以理解,在满足定位功能、加工及装配工艺要求的基础上,定位孔BW1和定位柱CE1可反向设置,即定位孔BW1开设于砝码格CE的底板上,定位柱CE1设置于砝码BW底部。
如前所述,起重装置可将砝码定位机构中任一砝码BW移动至车厢C内指定位置,以便模拟轨道车辆超载、偏载和/或超偏载的工况。接下来,结合说明书附图来说明起重装置的具体结构及工作原理。
如图6所示,该图示出了起重装置的主视结构示意图。起重装置包括主体、吊钩3、伸缩起吊臂2、起升机构(图中未示出)、行走机构(图中未示出)、回转机构(图中未示出)、伸缩机构(图中未示出)和两条平行轨道75。其中,两条平行轨道75沿纵向延伸并通过支承架SF固连于车厢C左右两个侧板上,主体通过行走机构可沿两条平行轨道75行驶,伸缩起吊臂通过回转机构可转动地连接于主体上,伸缩机构用于驱动伸缩起吊臂内多个节臂相对伸缩,吊钩3通过起升机构可升降地连接于伸缩起吊臂上,以将砝码BW从砝码格CE内吊起。为了便于更好地理解起重装置的具体结构,请一并参见图7和图8,其中,图7示出了图6的侧视图,图8示出了图6的A-A向断面结构示意图。
接下来,结合图9和图10,对起重装置及其与轨道的配合关系加以详细说明。其中,图9示出了轨道和车厢的装配体的局部结构示意图,图10示出了图9的A-A向视图。
结合图9和图10可知,起重装置的两条平行轨道75均通过沿纵向依次间隔设置的多个支承架SF分别固连于车厢C左侧板和右侧板上。由于两条轨道75与车厢C相应侧板的连接方式相同,现结合图11和图12,以左侧轨道75为例来说明轨道75与车厢C的连接关系。其中,图11示出了图9的B-B向剖视结构示意图,图12示出了图11的C处局部放大示意图。
如图11和图12所示,支承架SF包括与左侧板固连的水平支承板SF1和斜支承板SF2,斜支承板SF2位于水平支承板SF1下方并与水平支承板SF1的自由端固连,轨道75固连于该水平支承板SF1上。显然,左侧板、水平支承板SF1和斜支承板SF2三者固连形成三角架结构,具有结构简单且承载能力强的特点。
进一步,为保证起重装置的行走安全性和可靠性,如图9所示,支承架SF的前后两端部均设置止挡件SB。为了便于更好地理解止挡件SB的具体结构,请一并参见图13,该图示出了图10的D处局部放大结构示意图。
如图13所示,止挡件SB包括通过连接板和螺栓组件固连于工字钢的止挡立板SB1,以及通过螺栓组件固连于止挡立板SB1上的止挡块SB2,该止挡板与起重装置的主体或行走机构相抵,以阻挡其沿轨道75前行。
需要说明的是,本具体实施方式中,每条轨道75具体为工字钢和固定于该工字钢上端的条钢拼装而成。可以理解,在满足支承主体1沿固定轨迹移动功能基础上,轨道75的结构并不仅限于上述结构,亦可采用现有技术中常用的任一种结构。
接下来,结合图14至图16,来详细说明起重装置的主体和行走机构的具体机构以及两者的装配关系。其中,图14至图16分别示出了轨道、主体和行走机构三者装配体的主视、俯视和侧视结构示意图。
如图14所示,行走机构包括通过转动轴承可转动地连接于主体1上的四个行走轮71,这四个行走轮71均分成两组并相对于轨道75的长度方向左右对称设置。后端两个行走轮71通过驱动电机M、联轴器73和传动轴72同步转动,驱动电机M通过减速器驱动该传动轴72转动,传动轴72通过联轴器73与左右两个行走轮71的轴端传动连接。同理,主体1前端的两个行走轮71同样通过一个电机M,再配以联轴器73和传动轴72等结构驱动。为了便于更好地理解行走机构的具体结构,请一并参见图15和图16。
行走轮71具有导向槽,轨道75上的条钢嵌入该导向槽内,行走轮71的左右轴端通过轴承可转动地连接于主体1上。
进一步,结合图14至图16可知,主体1包括顶板11、底板12和四个U字型槽钢13拼装而成,其中,四个U字型槽钢13均分为与两条轨道75对应设置的两组,每一组内两个槽钢间隙布置且两者的槽口相向横向朝外,U字型槽钢13的上水平板与顶板11焊接固连,其下水平板与底板12焊接固连,其竖直板开设有轴承孔,行走轮71的轴端通过安装于该轴承孔的轴承可转动地连接于主体1上。
该主体1为采用标准板件拼装而成箱体结构,具有制造成本低、重量轻等特点。可以理解,在满足主体1承重要求、加工及装配工艺要求的基础上,该主体1亦可采用铸件或实心结构。
更进一步地,结合图14至图16可知,为了防止吊重行走时小车倾翻,本具体实施方式中在每个行走轮71下方设置了防滚轮74,该防滚轮74通过轴承可转动地连接于主体1上,并位于轨道75工字钢的下限位面下方。
接下来,结合图17至图21,来详细说明起重装置的伸缩起吊臂和伸缩机构的具体机构以及两者的装配关系。其中,图17和图18分别示出了主体、伸缩起吊臂和伸缩机构三者装配体的主视和侧视结构示意图,图19至图21分别示出了图17的A-A、B-B和C-C向断面结构示意图。
如图17所示,伸缩起吊臂2包括依次套设的外节臂21、中间节臂22和内节臂23,伸缩机构用于驱动该伸缩起吊臂2内三节臂相对伸缩,以调整伸缩起吊臂2的长度。伸缩起吊臂2的外节臂21、中间节臂22和内节臂23三者均由板件焊接拼装而成,具体为截面形状为方形的筒状结构。为了便于更好地理解伸缩起吊臂的三节臂的具体结构。
如图19至21所示,伸缩起吊臂2内相邻两个节臂间相对滑动的通过滑块实现,具体地,相邻两个节臂中至少一者的上下滑动面上固连了多个滑块S。
进一步地,为了减小纯滑动配合关系引起配合面间磨损量大以及滑动过程顺畅性差的问题。本具体实施方式中,相邻两个节臂间还可通过滚轮T实现滚动配合关系。
具体地,如图17所示,外节臂21和中间节臂22两者上均可转动地连接有滚轮T,中间节臂22通过设置于外节臂21上的滚轮T沿伸缩方向移动相对于外节臂21,同理,内节臂23通过设置于中间节臂22上的滚轮T沿伸缩方向移动相对于外节臂21。为了便于更好地理解三节臂间通过滚轮滚动配合关系,请一并参见图22、23、25、26、27和29,其中,图22和图23分别示出了外节臂的主视和俯视结构示意图,图25至图27分别示出了内节臂的主视、俯视和仰视结构示意图,图29示出了图25的B-B向断面结构示意图。
伸缩起吊臂2通过滑滚动复合配合关系实现三节臂间相对移动关系,这样既可降低采用纯滚动方式造成的成本,还可减小纯滑动配合方式导致相邻节臂配合面间磨损量并提高伸缩顺畅性。
继续参见图17和图18可知,伸缩机构包括驱动单元,以及两组相对于伸缩起吊臂2伸缩方向左右对称设置的伸出组件和缩回组件。
继续参见图17,每组伸出组件包括伸出牵拉件41和伸出滑轮42,其中,伸出滑轮42通过固定轴、轴承组件和螺栓组件等可转动地连接于靠近中间节臂22前端的侧板上。具体地,固定轴穿过开设于中间节臂22侧板上的轴孔22a并与侧板固定连接,伸出滑轮42通过轴承组件可转动地连接于固定轴上。伸出牵拉件41一端铰接于外节臂21的后端,另一端绕过该伸出滑轮42并固连于内节臂23的后端。为了便于更好地理解,伸出滑轮42与中间节臂的连接关系,请一并参见图19。
同理,每组缩回组件包括缩回牵拉件43和缩回滑轮44,其中,缩回滑轮44通过固定轴、轴承组件和螺栓组件等可转动地连接于靠近中间节臂22后端的底板12上,具体地,固定轴固连于中间节臂22的底板12上,缩回滑轮44通过轴承组件可转动地连接于固定轴上。缩回牵拉件43一端铰接于内节臂23的后端,另一端绕过该缩回滑轮44并固连于外节臂21的前端。为了便于更好地理解,缩回滑轮44与中间节臂22的连接关系,请一并参见图21。
如图17和图18所示,驱动单元用于驱动中间节臂22相对于外节臂21往复移动,该驱动单元包括电机M和相互啮合的齿轮45和齿条46,其中,电机M固连于外节臂21的外表面,齿轮45通过键连接、过盈配合或联轴器73的方式固连于电机M的输出轴上,齿条46沿伸缩起吊臂2的伸缩方向固连于中间节臂22底板12的外表面,此外,为了实现齿轮45齿条46的啮合关系,外节臂21的底板12开设有沿伸缩方向延伸的滑槽A,齿轮45和齿条46通过该滑槽A实现啮合关系,以驱动中间节臂22相对于外节臂21往复运动。为了便于更好地理解齿条46的设置位置及滑槽的开设位置,请一并参见图23、25和26。
可以理解,用于驱动中间节臂22相对于外节臂21往复运动的驱动单元并不仅限于上述结构,该驱动单元可以采用液压控制系统的本领域常用的其他驱动方式。
伸缩起吊臂2在上述伸缩机构作用下的伸缩原理是:以伸缩起吊臂2处于缩回状态下为初始状态,启动电机M,驱动齿轮45逆时针转动(逆时针是以垂直于纸面方向为参考设定),继而使齿条46带动中间节臂22相对于外节臂21向前移动;与此同时,伸出牵拉件41在伸出滑轮42拉动作用下拉动外节臂21相对于内节臂23向前伸出,由于外节臂21、中间节臂22和内节臂23三者可相对于伸缩,且伸出滑轮42可转动地连接于中间节臂22,而由该伸出滑轮42张紧的伸出牵拉件41则一端与内节臂23后端固连,另一端与外节臂21后端固连,实质上伸缩起吊臂2、伸出滑轮42和伸出牵拉件41配合构成一个完整的动滑轮机构,根据动滑轮机构原理,内节臂23相对于外节臂21的伸长长度为中间节臂22相对于外节臂21伸出长度的两倍,从而巧妙的实现了中间节臂22和内节臂23相对于外节臂21的同步伸出。
同理,伸缩起吊臂2、伸出滑轮42和伸出牵拉件41也配合构成一个完整的动滑轮机构。当改变电机M转向后带动齿轮45顺时针转动,与之啮合的齿条46带动中间节臂22相对于外节臂21向后移动直至完全缩回,与此同时,缩回牵拉件43牵拉内节臂23相对于中间节臂22向后移动直至完全缩回。
本具体实施方式中处于牵拉强度等考虑,伸出牵拉件41和缩回牵拉件43均优选采用现有的链条,当然,在满足牵拉三节臂相对于伸出或缩回所需的牵拉强度前提下,伸出牵拉件41和缩回牵拉件43两者亦可采用钢丝绳作为牵拉间。
进一步,如图18所示,伸出组件和缩回组件均为沿伸缩方向左右对称设置的两组,如此可保证伸缩起吊臂2伸缩运动的平稳性和可靠性。可以理解,在满足驱动伸缩起吊臂2伸缩功能及装配工艺要求的基础上,对伸出组件和缩回组件的具体数量可以不加以限定。
另外,依据砝码BW相对于起吊装置的具体方位,通过控制电机M的转速来调节伸缩起吊臂2的伸缩长度,继而使起重设备在不移动主体1的情况下,亦可起吊不同位置的砝码BW,继而提高起重装置的适用场所。
需要说明的是,本具体实施方式中伸缩起吊臂仅包括三节臂,这三个节臂与伸缩机构的驱动单元、伸出组件和缩回组件等配合构成动滑轮机构,进而实现中间节臂和内节臂相对于外节臂的同步伸缩。可以理解,该伸缩起吊臂也可包括四节臂、五节臂等异于本具体实施方式显示数量节臂。
例如,当伸缩起吊臂包括第一节臂、第二节臂、第三节臂和第四节臂(按由外向内的顺序命名)四个节臂时,其中,该伸缩起吊臂的相邻三个节臂间通过伸缩机构形成动滑轮机构。
具体地,第二节臂的前后端分别可转动地连接伸出滑轮42和缩回滑轮44,伸出牵拉件41的一端与第一节臂铰接,另一端与第三节臂铰接,并由伸出滑轮42张紧,缩回牵拉件43的一端与第一节臂铰接,另一端与三节臂铰接,并由缩回滑轮44张紧;同理,第三节臂的前后端分别可转动地连接伸出滑轮42和缩回滑轮44,伸出牵拉件41的一端与第一节臂铰接,另一端与第三节臂铰接,并由伸出滑轮42张紧,缩回牵拉件43的一端与第一节臂铰接,另一端与三节臂铰接,并由缩回滑轮44张紧。
如此设置,当驱动单元驱动第二节臂相对于第一节臂伸缩时,第三节臂相对于第二节臂伸缩,第四节臂相对于第三节臂伸缩,继而使伸缩起吊臂内四节臂同步伸缩。也就是说,当伸缩起吊臂包括依次套设的多个节臂时,其中,每相邻三个节臂(现以外节臂、中间节臂和内节臂相称,此处并非特指具体实施方式中三个节臂)的中间节臂的前端和后端分别可转动地连接有伸出滑轮42和缩回滑轮44,伸出牵拉件41的两端部分别与外节臂和内节臂连接并由伸出滑轮42张紧,缩回牵拉件43的两端部同样分别与外节臂和内节臂连接并由缩回滑轮44张紧。
当然,伸缩起吊臂亦可仅包括两节臂,对于这种伸缩起吊臂来说可通过液压系统进行驱动,例如,外节臂与液压缸的缸体固连,内节臂与液压缸的活塞杆连接,通过控制液压缸伸缩即可实现伸缩起吊臂的伸缩。
接下来,结合图30和图31,来详细说明起重装置的主体、伸缩起吊臂和回转机构三者的具体机构以及装配关系。其中,图30和图31分别示出了主体、伸缩起吊臂和回转机构的具体机构以及三者的装配体的主视和俯视结构示意图。
结合图30和图31可知,起重装置的回转机构包括电机M和回转支承51,其中,回转支承51的内圈通过主体连接法兰52与主体1固定连接,其外圈也通过伸缩起吊臂连接法兰53与伸缩起吊臂2的外节臂21固定连接,电机M固连于主体1上并用于驱动回转支承51外圈或者伸缩起吊臂连接法兰537转动,以实现伸缩起吊臂2相对于主体1的回转运动。
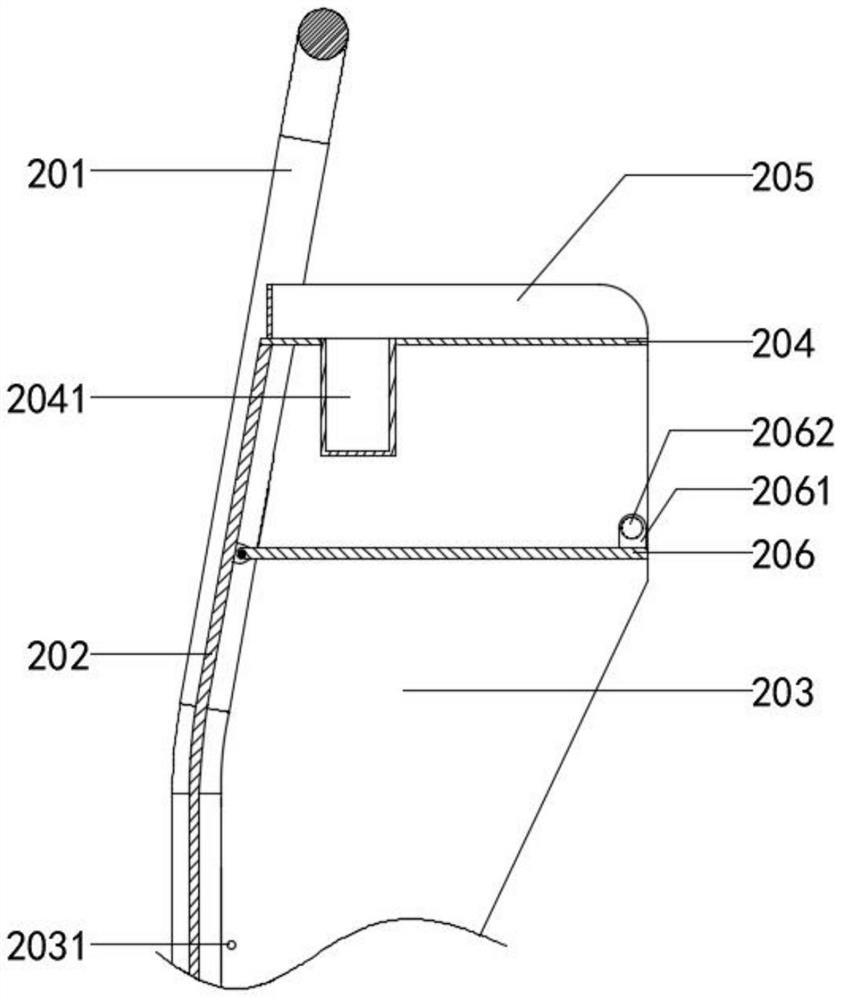
接下来,结合图32,来详细说明起重装置的起升机构的具体机构及其与吊钩3和伸缩起吊臂两者的装配关系,该图示出了吊钩3、伸缩起吊臂和起升机构两者装配体的主视结构示意图。
如图32所示,起重装置的起升机构包括起吊绳61、卷筒62、电机M和多个导向轮G,其中,卷筒62可转动地连接于伸缩起吊臂2的外节臂21上,电机M通过电机连接板47和螺栓组件固连于伸缩起吊臂2的外节臂21上并用于驱动卷筒62转动,起吊绳61一端固定并卷绕于卷筒62上,另一端依次绕过设置于外节臂21和内节臂23上的导向轮G后,再穿过开设于内节臂23底板上的起吊绳穿过孔23a,绕过吊钩3上的导向轮G,最后与外节臂21固定连接。其中,每个导向轮G与相应组件均通过轴承可转动连接,且每个导向轮G外周壁均开设有容置起吊绳61的导向槽,以防止起吊绳61挣脱。
为了便于更好地理解导向轮的具体结构,现结合图24及33至35分别对外节臂上的导向轮和内节臂上的导向轮的具体机构加以详细说明,其中,图24示出了图22的A-A向剖视结构示意图,图33和图34分别示出了内节臂的主视和仰视结构示意图,图35示出了图33的A-A向剖视结构示意图。
如图24所示,设置于外节臂21的导向轮G包括具有起吊绳61容置槽的轴套和固连于外节臂21两侧板的固定轴,该轴套通过轴承可转动地连接与该固定轴上。
结合图33至图35所示,设置于内节臂23的导向轮G包括固定于内节臂23两侧板的固定轴,安装于该固定轴的两个轴承,这两个轴承的内圈通过沿固定轴长度方向间隔设置的轴套以及左右挡板固定于固定轴上,其外圈套设有由耐磨材料的导向轮G,该导向轮G开设有用于容置起吊绳61周向导向槽。
另外,结合图24和图35可知,内节臂23的导向轮G具体为同轴设置的两个,与之对应地吊钩3上同样具有两个同轴设置的导向轮G,起吊绳61、绕过内节臂23和吊钩3上的两个导向轮G。具体地,起吊绳61绕过外节臂21上的导向轮G延伸至内节臂23内,再绕过内节臂23的第一个导向轮G后穿过起吊绳61穿过孔并绕过第一个导向轮G,然后向上延伸再次穿过内节臂23底板12上的起吊绳61穿过孔,再绕过内节臂23的第二个导向轮G后向下延伸至穿过起吊绳61穿过孔、绕过吊钩3的第二个导向轮G,最后再与伸缩起吊臂2的外节臂21固定连接。
本具体实施方式提供的起重装置集行走、回转和起吊臂伸缩等多种功能于一身,可以根据砝码BW的实际位置,通过控制回转机构、伸缩起吊臂2和/或行走机构等起吊任意位置的砝码BW,与传统起重装置相比,适用范围得到了极大的拓展,可以满足多种场合内不同位置的起吊作业。
最后,需要说明的是,上述起重装置的吊钩3可以为现有技术中任一种。
进一步,车厢C的左侧板和右侧板两者中至少一者设置有侧门,前端板和后端板两者中至少一者具有端门,以便伸缩起吊臂2由侧门或端门伸出至车厢C外,且端门和侧门中至少一者为塞拉门。
接下来,结合说明书附图的图36至图40来详述塞拉门的具体结构,其中,图36示出了本发明所提供塞拉门的结构示意图,图37示出了图36中手柄锁定装置解锁状态的结构示意图,图38示出了图36中手柄锁定装置锁定状态的结构示意图,图39示出了手柄锁定装置解锁手柄的结构示意图,图40示出了手柄锁定装置锁定手柄的结构示意图。
塞拉门包括门体81及门体锁定装置83,且该塞拉门的门体81与车厢的门框82连接。门体锁定装置83通过手柄831驱动,以使门框82与车厢的门柱811锁定。
另外,该塞拉门还包括手柄锁定装置84,其具有锁定和解锁两种工作状态,在锁定状态,手柄锁定装置84限制手柄831的转动;在解锁状态,手柄831可自由转动。
车辆行驶时,手柄831通过手柄锁定装置84锁定,防止其由于车厢震动等原因而发生转动松动,从而防止车门自动开启及车内货物散落。因此,本实施例中的塞拉门保证车辆具有较高的行车安全性,同时,可防止车内货物被盗。
同时,由于装卸货物等原因需要开启车门时,手柄锁定装置84控制手柄831解锁,使其自由转动,车门开启。
具体地,如图37和图38所示,手柄锁定装置84包括相互连接的限位部841和底座842,其中,底座842固定于门体81,在锁定状态,限位部841与底座842锁定,在锁定位置,限位部841限制手柄831转动,在解锁状态,限位部841可相对于底座842移动或转动,以解除对手柄831转动的限制。
可以理解,本实施例中的手柄锁定装置84并不仅限于通过限位部841和底座842实现,也可在手柄831上开设安装孔,并在该安装孔内装入插销等限位件,同时将该插销固定。但是,由于手柄831开设安装孔,使其强度大大降低,同时,由于每次锁定时均需将插销装入安装孔内,而每次解锁时均需将该插销从安装孔内取出,造成该手柄锁定装置结构复杂,操作不便。
进一步地,限位部841铰接于底座842,且限位部841与底座842分别开设第一锁孔8431和第二锁孔8441;另外,该手柄锁定装置84还包括锁头。工作时,限位部841相对于底座842旋转,并使得第一锁孔8431和第二锁孔8441相互重合,同时,锁头通过第一锁孔8431与第二锁孔8441锁定,该手柄锁定装置84处于锁定状态。需要开门时,首先打开锁头并将其从第一锁孔8431与第二锁孔8441中取出,然后限位部841相对于底座842旋转,该手柄锁定装置84解锁。
显然,手柄锁定装置84并不是必须包括锁头,也可在第一锁孔8431和第二锁孔8441中插入连接轴,从而限制限位部841的旋转。但是,本实施例中两锁孔通过锁头锁定时,只能通过相适配的钥匙才能开启,因此,除具有锁定手柄831的功能外,还可起到防盗的作用,基于此,本实施例中优选包括锁头。
更进一步地,限位部841设有第一吊耳843,且该第一吊耳843开设上述第一锁孔8431,底座842设有第二吊耳844,且该第二吊耳844开设上述第二锁孔8441。
具体地,上述第一吊耳843与限位部841、第二吊耳844与底座842均可采用一体成型或焊接等连接方式,本实施例中,基于连接的紧固性及方便操作的目的,采用焊接的方式。
当然,也可将上述两锁孔分别设于限位部841和底座842,但是,本实施例中将两锁孔分别设于对应的吊耳时,可保证限位部841与底座842的强度,提高设备的使用寿命。
具体地,该限位部841包括相互焊接的固定板8411和U型板8412,且二者竖向分布。其中,固定板8411与底座842铰接,以使限位部841相对于底座842竖向旋转,第二吊耳844设于固定板8411背离门体81的一侧,其朝向门体81的一端焊接于门体81的门板,因此,该手柄锁定装置84工作时,第二吊耳844始终保持静止。第一吊耳843设于固定板8411朝向门体的一侧,如此设置,当限位部841位于锁定状态时,第一吊耳843与第二吊耳844相互重合。
同时,U型板8412沿手柄831的轴向(如图40所示的竖直方向)延伸,在锁定状态,手柄831位于U型板8412的U型槽内,如图40所示,通过U型板8412的两侧壁限制手柄831的竖向旋转,从而将该手柄831锁定。
具体地,图36中,门体锁定装置83设于门体81的门板内,手柄831位于门体81的门板外侧,且其与门体锁定装置83通过螺旋杆连接,工作人员通过控制手柄831而控制位于门体81内部的门体锁定装置83。
另外,手柄锁定装置84同样位于门体81门板的外侧,且设于手柄831的下方(图39和图40所示的视角)。如图37和图39所示,解锁状态下,限位部841在其自身重力的作用下,处于自然状态,此时,第一吊耳843与第二吊耳844分离,限位部841对手柄831不具有限位作用。如图6和图8所示,在锁定状态下,人为将限位部841旋转180°,使得第一锁孔8431与第二锁孔8441重合,并通过锁头将二者锁定,此时,手柄831位于U型板8412内,其两侧壁限制手柄831的竖向转动。
当然,限位部841与底座842相对位置并不仅限于此,二者也可左右分布,此时,解锁和锁定时,均需人工旋转限位部841。本实施例中二者竖向分布时,解锁状态下限位部841可自动旋转,且由于限位部841的转动方向与手柄831的轴向相同,可避免旋转过程中限位部841与手柄831干涉。
另外,限位部841也并不仅限于包括U型板8412,也可采用其它形状的结构,只要可限制手柄831的竖向转动即可,此处不作限定。
更进一步地,如图37所示,固定板8411与底座842的两侧分别开设相互连通的安装孔,且两侧的安装孔内均设有销轴845,以使限位部841绕该销轴845旋转,同时,该销轴845通过开口销846固定。
可以理解,上述限位部841与底座842的铰接并不仅限于通过销轴845实现,也可采用本领域常用的其它方式,例如铰接螺栓等结构,此处不作限定。
请继续参考附图41-43,其中,图41为图36的俯视图;图42为图41中Ⅰ部分的局部放大图;图43为图41中门框与门柱配合的结构示意图。
以上各实施例中,门柱811的截面与门框82的截面为相互配合的梯形,且门框82与门柱811之间设置门封条82121。
现有的塞拉门中,门框及门柱均为方管结构,为了保证开门和关门过程的顺利进行,门框与门体之间具有一定间隙,由于该间隙的存在,使得车辆在运行时会使塞拉门产生震动,该震动造成门体与门框撞击,使二者产生疲劳损坏,减小塞拉门的使用寿命。同时,该间隙的存在还造成该塞拉门密封效果较差。
本实施例中,门框82与门柱811均采用梯形管结构,且二者之间设置门封条821,基于图41-43的视角,塞拉门关闭时,门柱811相对于门框82竖向运动,并挤压门封条821,从而实现门框82与门柱811的密封,同时,减小二者之间的震动,提高塞拉门的使用寿命。
本实施例中,由于门框82与门柱811均为梯形管结构,当塞拉门关闭时,相较于现有技术中门框与门柱均为矩形管的结构,该相互配合的梯形管结构可起到导向的作用,关门时不需要严格对准即可关闭,保证该塞拉门顺利关闭。另外,如图43所示的视角,塞拉门关闭时,门体81沿图11中至下向上运动,门框82与门柱811之间的间隙逐渐减小。因此,该相互配合的梯形管结构进一步提高门框82与门柱811之间的密封性。
进一步地,门框82设有朝向门柱811的挡块822。塞拉门关闭时,该挡块822用于限制门框82与门柱811之间的相对位置,从而防止二者之间的间隙过小时压坏门封条821。
以上各实施例中的塞拉门按如下过程开门:首先,将手柄锁定装置84解锁至如图39所示的状态(解锁过程如上所述),此时,手柄831可自由转动,通过手柄831的转动控制门体锁定装置83,使得锁铁将门框82与门柱811解锁(门体锁定装置83的解锁过程参见背景技术),如图11所示的视角,此时门体81至上向下运动,当门体81向下移动大于门体81厚度的距离时,门体81从门框82中移出,此时,门体81可沿轨道左右滑动(如图36所示的视角),塞拉门打开完成。塞拉门的关闭过程与开门过程相反,此处不再赘述。
本发明还提供一种塞拉门的手柄锁定装置84,用于锁定或解锁手柄;该手柄锁定装置84包括相互连接的限位部841和底座842,其中,底座842固定于塞拉门的门体81。另外,该手柄锁定装置84具有锁定和解锁两种工作状态,在锁定状态,限位部841与底座842锁定,在锁定位置,限位部841限制手柄831转动,在解锁状态,限位部841可相对于底座842移动或转动,以解除对手柄831转动的限制。
可以理解,该手柄锁定装置84为以上任一实施例中所述的手柄锁定装置84,其结构及有益效果如前所述,此处不再赘述。
以上所述仅为本发明的优选实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
一种轨道车辆用超偏载检衡车专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0