








专利摘要
一种可变形具有自主导航及行走功能的轮式双足机器人,包括可变形机械本体和自主导航行走系统,所述自主导航行走系统位于可变性机械本体上,所述自主导航行走系统包括控制系统、动力系统、电源系统、交互系统、无线通信系统和卫星定位系统,所述控制系统分别与动力系统、交互系统、电源系统、无线通讯系统和卫星定位系统电连接,本发明装置作为公用单车,骑行者在到达目的地后,机器人从单车的形态变形为轮式双足机器人后可自主返航,满足使用者随意停放的需求,消除了车辆随意停放对环境的影响;本发明装置作为私有单车使用,骑行者到达目的地后,机器人从单车的形态变形为轮式双足机器人后可自主跟随主人。
权利要求
1.一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于,包括可变性机械本体和自主导航行走系统,所述自主导航行走系统位于可变性机械本体上,所述自主导航行走系统包括控制系统、动力系统、电源系统、交互系统、无线通信系统和卫星定位系统,所述控制系统分别与动力系统、电源系统、交互系统、无线通讯系统和卫星定位系统电连接;
所述可变形机械本体包括前轮组、后轮组、刹车器和机械骨架,所述后轮组通过后轴与机械骨架后叉一端相连,所述前轮组通过前轴与机械骨架前叉一端相连,所述机械骨架可变形车把与前轮组和机械骨架可变形车把与后轮组之间均设置有刹车器;
所述机械骨架包括第一机械骨架和第二机械骨架,所述第一机械骨架包括曲柄中轴后轮传动机构、可变形车把、前叉上管变形锁定装置、前轮变形锁定装置、后轮变形锁定装置、座管变形锁定装置、上管变形锁定装置、上管、由座管A和座管B组成的座管、前叉上管、前叉、后叉、头管、车座和蓄电池,所述后叉另一端通过后轮变形锁定装置与曲柄中轴后轮传动机构的中轴安装管外壁相连,曲柄中轴后轮传动机构中轴安装管外壁设置有座管A,座管A顶部通过座管变形锁定装置与座管B相连,座管B顶部设置有车座,所述座管B侧壁与上管一端相连,多段上管通过上管变形锁定装置相连,上管另一端与头管外壁相连,头管外壁通过前轮变形锁定装置与前叉上管一端相连,所述头管顶部前叉上管伸出端设置有可变形车把,前叉上管另一端通过前叉上管变形锁定装置与前叉相连,所述前叉、后叉、座管或上管内壁设置有电源系统、控制系统、无线通讯系统和卫星定位系统,所述上管内壁设置有舵机,舵机顶部设置有机械臂,机械臂顶部设置有摄像头、麦克风和扬声器;
所述第二机械骨架包括包括曲柄中轴后轮传动机构、可变形车把、前叉上管变形锁定装置、前轮变形锁定装置、后轮变形锁定装置、座管变形锁定装置、上管变形锁定装置、上管、由座管A和座管B组成的座管、前叉上管、前叉、后叉、头管、车座、蓄电池、第一连管、第二连管和连管变形锁定装置,所述后叉另一端通过后轮变形锁定装置与曲柄中轴后轮传动机构的中轴安装管外壁相连,曲柄中轴后轮传动机构中轴安装管外壁设置有座管A,座管A顶部通过座管变形锁定装置与座管B相连,座管B顶部设置有车座,所述座管B中上部侧壁与第一连管一端相连,两段第一连管通过连管变形锁定装置相连,所述第一连管另一端与后叉一端固定安装,所述座管B侧壁与上管一端相连,多段上管通过上管变形锁定装置相连,上管另一端与头管外壁相连,头管外壁通过前轮变形锁定装置与前叉上管一端相连,所述上管上方座管B与头管之间设置有第二连管,多段第二连管通过连管变形锁定装置相连,第二连管另一端与头管侧壁固定安装,所述头管顶部前叉上管伸出端设置有可变形车把,前叉上管另一端通过前叉上管变形锁定装置与前叉相连,前叉底端通过前轴设置有前轮组,所述前叉、后叉、座管、上管、第一连管或第二连管内壁设置有电源系统、控制系统、无线通讯系统和卫星定位系统,所述上管内壁设置有舵机,舵机顶部设置有机械臂,机械臂顶部设置有摄像头、麦克风和扬声器。
2.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述前轮组包括前部轮胎、前部轮圈、前轮辐条、前轴、前轮电机,所述前部轮圈外壁设置有前部轮胎,所述前部轮圈内壁与前轮电机外转子外壁设置有前轮辐条,前轮电机定子设置在前轴外表面中部;所述后轮组包括后部轮胎、后部轮圈、后轮辐条、后轴、后轮电机,所述后部轮圈外壁设置有后部轮胎,所述后部轮圈内壁与后轮电机外转子外壁设置有后轮辐条,后轮电机定子设置在后轴外表面中部,所述前轮电机和后轮电机均与电源系统电连接。
3.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述曲柄中轴后轮传动机构包括曲柄中轴后轮链条传动机构和曲柄中轴后轮齿轮传动机构,所述曲柄中轴后轮链条传动机构包括中轴安装管、中轴、脚踏、曲柄、牙盘、飞轮和链条,所述中轴安装管内壁设置有中轴,中轴两端设置有曲柄,曲柄末端设置有脚踏,中轴外壁设置有牙盘,且牙盘位于中轴安装管和曲柄之间,所述牙盘与飞轮之间设置有链条,所述飞轮设置在后轮电机外转子一侧端盖上,且位于后叉与后轮电机外转子端盖之间;
曲柄中轴后轮齿轮传动机构包括中轴安装管、中轴、脚踏、曲柄、传动杆、第一主动锥齿轮、第一从动锥齿轮、第二主动锥齿轮、第二从动锥齿轮,所述中轴安装管内壁设置有中轴,中轴两端设置有曲柄,曲柄末端设置有脚踏,所述中轴外壁设置有第一主动锥齿轮,且第一主动锥齿轮位于中轴安装管和曲柄之间,所述第一主动锥齿轮轮齿上设置有与其啮合的第一从动锥齿轮,所述第二从动锥齿轮设置在后轮电机外转子一侧的端盖上,且位于后叉内部,所述第二从动锥齿轮轮齿上设置有与其啮合的第二主动锥齿轮,第二主动锥齿轮与第一从动锥齿轮之间设置有传动杆。
4.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述可变形车把包括固定把和折叠把,所述固定把两端通过车把变形锁定装置与折叠把连接,所述车把变形锁定装置包括车把手动变形锁定装置和车把自动变形锁定装置,所述车把手动变形锁定装置包括转动轴、封堵、第一棘轮、第一安装板、第一基座、第一锁杆、第一棘爪、弹簧和手轮,所述转动轴一端外表面与固定把固定安装,转动轴另一端外表面设置有折叠把,所述转动轴外侧伸出折叠把部分设置有封堵,所述转动轴外表面设置有第一棘轮,且第一棘轮位于固定把内部,折叠把外壁设置有两个第一安装板,两个第一安装板之间设置有第一基座,第一基座通孔内设置有第一锁杆,且第一锁杆轴线与第一棘轮轴线垂直设置,所述第一锁杆靠近第一棘轮一侧端部设置有第一棘爪,所述第一锁杆外表面设置有弹簧,弹簧靠近第一棘爪一端与第一棘爪固定安装,所述第一锁杆远离第一棘轮一端设置有手轮,且手轮位于第一安装板外侧;
所述车把自动变形锁定装置包括转动轴、封堵、锁定轮、变形齿轮、电机、减速器、第一锥齿轮、第一安装板、螺线圈、铁芯、弹簧、第一棘爪、限位挡板、键轴和步进电机,所述转动轴一端外表面与固定把固定安装,转动轴另一端外表面设置有折叠把,所述转动轴外侧伸出折叠把部分设置有封堵,所述转动轴外表面设置有锁定轮和变形齿轮,所述折叠把内壁设置有电机,电机输出端与减速器输入端相连,减速器输出轴末端设置有与变形齿轮啮合的第一锥齿轮,所述折叠把外壁设置有两个第一安装板,两个第一安装板之间设置有螺线圈,螺线圈内部设置有铁芯,铁芯外表面设置有弹簧,铁芯一端与第一棘爪相连,铁芯另一端与限位挡板固定,限位挡板上设置有键轴,键轴与步进电机输出轴上的键孔匹配,且步进电机位于第一安装板内侧;
基于蜗轮蜗杆减速器的车把自动变形锁定装置包括转动轴、封堵、第一棘轮、电机、箱体、蜗杆、齿轮轴、蜗轮、第一齿轮和第二齿轮,转动轴一端外表面与固定把固定安装,转动轴另一端外表面设置有折叠把,所述转动轴外侧伸出折叠把部分设置有封堵,所述转动轴外表面设置第一棘轮,所述折叠把内壁设置有电机和箱体,电机通过联轴器与蜗杆一端相连,所述箱体通过齿轮轴设置有与蜗杆啮合蜗轮,蜗轮后端齿轮轴上设置有第一齿轮,第一齿轮轮齿上设置有与其啮合的第二齿轮,第二齿轮通过齿轮轴转动安装在箱体内壁,所述第二齿轮轮齿与第一棘轮啮合。
5.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述后轮变形锁定装置包括后轮手动变形锁定装置、后轮自动变形锁定装置和基于蜗轮蜗杆减速器的后轮自动变形锁定装置,所述后轮手动变形锁定装置包括第二棘轮、第二安装板、第二基座、第二锁杆、弹簧、第二棘爪和手轮,所述后轮手动变形锁定装置设置在中轴安装管上,所述中轴安装管外表面中部设置有第二棘轮,中轴安装管外表面对称设置有两个第二安装板,且第二棘轮位于第二安装板之间,一端两个所述第二安装板与后叉固定安装,另一端两个所述第二安装板通过螺钉螺接有第二基座,所述第二基座通孔内穿插有第二锁杆,第二锁杆外表面设置有弹簧,第二锁杆靠近第二棘轮一侧端面设置有第二棘爪,所述弹簧靠近第二棘爪一端与第二棘爪固定安装,所述第二锁杆远离第二棘轮一端设置有手轮,且手轮位于第二安装板外侧;
所述后轮自动变形锁定装置包括第三齿轮、第二安装板、电机、减速器、第二锥齿轮、螺线圈、铁芯、弹簧、第二棘爪、限位挡板、键轴和步进电机,所述后轮自动变形锁定装置设置在中轴安装管上,所述中轴安装管外表面中部设置有第三齿轮,中轴安装管外表面对称设置有两个第二安装板,且第三齿轮位于第二安装板之间,一端两个第二安装板与后叉固定安装,所述后叉内壁设置有电机,电机输出端通过联轴器减速器输入端相连,减速器输出轴末端设置有与第三齿轮啮合的第二锥齿轮,另一端两个第二安装板之间设置有螺线圈,螺线圈内部设置有铁芯,铁芯外表面设置有弹簧,铁芯一端与第二棘爪相连,铁芯另一端与限位挡板固定,限位挡板上设置有键轴,键轴与步进电机输出轴上的键孔匹配,且步进电机位于第二安装板内侧;
基于蜗轮蜗杆减速器的后轮自动变形锁定装置包括电机、蜗杆、箱体、齿轮轴、蜗轮、小轮、大轮和第二棘轮,所述电机和箱体设置在后叉内壁上,电机输出轴通过联轴器与蜗杆一端相连,所述箱体内壁通过齿轮轴转动安装有蜗轮和小轮,且小轮位于蜗轮后端,所述小轮轮齿上设置有与其啮合的大轮,大轮齿轮上设置有与其啮合的第二棘轮,第二棘轮设置在中轴安装管上。
6.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述前轮变形锁定装置包括前轮手动变形锁定装置和前轮自动变形锁定装置,所述前轮手动变形锁定装置包括锁孔部分和锁舌部分,所述锁孔部分包括第一安装部、第一滑道和锁孔,所述第一安装部外侧设置有第一滑道,所述第一滑道底端设置有锁孔,所述锁孔部分通过第一安装部与前叉上管固定安装;所述锁舌部分包括第二安装部、第三锁杆、弹簧、锁舌和螺母,所述第二安装部内孔穿插有第三锁杆,所述第二安装部顶部第三锁杆伸出端外表面设置有弹簧,第三锁杆顶部设置有锁舌,弹簧一端与第二安装部上表面固定安装,弹簧另一端与锁舌底部固定安装,所述第二安装部底端第三锁杆伸出端设置有螺母,所述锁舌部分通过第二安装部与头管固定安装;
所述前轮自动变形锁定装置包括自动变形装置、锁孔部分和锁舌部分,所述自动变形装置包括壳体、电机、减速器、第四齿轮和扇形轮,所述自动变形装置通过壳体与头管固定安装,所述壳体内设置有电机,所述电机输出端与减速器输入端相连,所述减速器输出轴贯穿壳体,且输出轴末端设置有第四齿轮,所述前叉上管外表面设置有与第四齿轮啮合的扇形轮;所述锁孔部分包括第一安装部、第一滑道和锁孔,所述第一安装部外侧设置有第一滑道,所述第一滑道底端设置有锁孔,所述锁孔部分通过第一安装部与前叉上管固定安装,所述锁舌部分包括第二安装部、螺线圈、铁芯、弹簧和锁舌,所述第二安装部内设置有螺线圈,所述锁舌部分通过第二安装部固定在头管外表面,所述螺线圈中部设置有铁芯,铁芯顶端设置有锁舌,所述螺线圈底端铁芯伸出端外表面设置有弹簧,弹簧一端与铁芯底部固定,弹簧另一端抵在螺线圈底端面上。
7.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述前叉上管变形锁定装置包括前叉上管手动变形锁定装置、前叉上管自动变形锁定装置和基于蜗轮蜗杆减速器的上管自动变形锁定装置,所述前叉上管手动变形锁定装置包括转动轴、封堵、第三棘轮、第三安装板、第三基座、第四锁杆、第三棘爪、弹簧和手轮,所述转动轴外表面一端转动安装有前叉上管,且转动轴外侧伸出前叉上管部分设置有封堵,所述转动轴外表面另一端固定安装有前叉,所述转动轴外表面设置有第三棘轮,前叉上管外壁设置有两个第三安装板,两个第三安装板之间设置有第三基座,第三基座通孔内设置有第四锁杆,且第四锁杆轴线与第三棘轮轴线垂直设置,所述第四锁杆靠近第三棘轮一侧端部设置有第三棘爪,所述第四锁杆外表面设置有弹簧,弹簧靠近第三棘爪一端与第三棘爪固定安装,所述第四锁杆远离第三棘轮一端设置有手轮,且手轮位于第三安装板外侧;
所述前叉上管自动变形锁定装置包括转动轴、封堵、锁定轮、变形齿轮、电机、减速器、第三锥齿轮、第三安装板、螺线圈、铁芯、弹簧、第三棘爪、限位挡板、键轴和步进电机,所述转动轴外表面一端转动安装有前叉上管,且转动轴外侧伸出前叉上管部分设置有封堵,所述转动轴外表面另一端固定安装有前叉,所述转动轴外表面设置有锁定轮和变形齿轮,所述前叉内壁设置有电机,电机输出端与减速器输入端相连,减速器输出轴末端设置有与变形齿轮啮合的第三锥齿轮,所述前叉上管外壁设置有两个第三安装板,两个第三安装板之间设置有螺线圈,螺线圈内部设置有铁芯,铁芯外表面设置有弹簧,铁芯一端与第三棘爪相连,铁芯另一端与限位挡板固定,限位挡板上设置有键轴,键轴与步进电机输出轴上的键孔匹配,且步进电机位于第三安装板内侧;
基于蜗轮蜗杆减速器的前叉上管自动变形锁定装置包括转动轴、第三棘轮、封堵、电机、箱体、蜗杆、齿轮轴、蜗轮、第五齿轮和第六齿轮,所述转动轴一端焊接有前叉,所述转动轴外表面设置第三棘轮,所述转动轴另一端外表面转动安装有前叉上管,所述转动轴靠近前叉上管部分端部设置有封堵,所述前叉上管内壁设置有电机和箱体,电机通过联轴器与蜗杆一端相连,所述箱体通过齿轮轴设置有与蜗杆啮合蜗轮,蜗轮后端齿轮轴上设置有第五齿轮,第五齿轮轮齿上设置有与其啮合的第六齿轮,第六齿轮通过齿轮轴转动安装在箱体内壁,所述第六齿轮轮齿与第三棘轮啮合。
8.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述座管变形锁定装置包括座管手动锁定装置、座管自动锁定装置和基于蜗轮蜗杆减速器的座管自动锁定装置,所述座管手动变形锁定装置包括第四棘轮、第三安装部、第二滑道、第一锁齿、第二锁齿、弹簧、滑块、第四棘爪和锁孔,所述第三安装部设置在座管A和座管B的连接处,且座管A通过其外部的凸台与座管B内部的凹槽配合转动安装,所述第三安装部底端与座管B固定安装,且第三安装部与座管B顶部之间形成第二滑道,所述第二滑道内设置有第一锁齿和第二锁齿,所述第一锁齿和第二锁齿两端均固定在滑道上,第一锁齿两端与弹簧一端相连,弹簧另一端与滑块一端相连,滑块另一端设置有第四棘爪,所述第四棘轮设置在座管A外表面,且位于座管B内侧,所述第三安装部内壁设置有与第一锁齿对应的三个锁孔,与第二锁齿对应的三个锁孔,所述座管A外表面设置有与第四棘爪配合的第四棘轮;
所述座管自动变形锁定装置包括第三安装部、第二滑道、第一锁齿、第二锁齿、螺线圈、铁芯、弹簧、滑块、第四棘爪、第四棘轮、锁孔、电机和减速器,所述第三安装部设置在座管A和座管B的连接处,所述第三安装部底端与座管B顶端贴合,且第三安装部与座管B之间形成第二滑道,所述第二滑道内设置有第一锁齿和第二锁齿,第二滑道内壁设置有螺线圈,螺线圈内部设置有铁芯,铁芯外壁设置有弹簧,所述铁芯另一端与滑块一端相连,滑块另一端与第四棘爪相连,所述座管A外表面设置有与第四棘爪配合的第四棘轮,所述第三安装部内壁设置有与第一锁齿对应的一个锁孔,与第二锁齿对应的三个锁孔,所述座管A底端凸台与座管B凹槽配合,且座管A底端面与座管B凹槽底贴合,所述座管A内部设置有电机,所述电机输出端与减速器输入端相连,所述减速器输出轴末端与座管B固定安装;
基于蜗轮蜗杆减速器的座管自动锁定装置包括电机、蜗轮蜗杆减速器和转轴,所述电机输出端设置有蜗轮蜗杆减速器,蜗轮蜗杆减速器输出端通过联轴器设置有转轴,转轴末端贯穿座管A底端与座管B相连,所述座管A底端凸台与座管B顶部凹槽配合。
9.根据权利要求1所述的一种可变形具有自主导航及行走功能的轮式双足机器人,其特征在于:所述控制系统包括主控制器和自平衡控制系统,所述自平衡系统包括MEMS陀螺仪、加速度计、左电机驱动器、右电机驱动器、右电机编码器和左电机编码器,所述主控制器分别与自平衡控制系统内的MEMS陀螺仪、加速度计、左电机驱动器、右电机驱动器、右电机编码器和左电机编码器电连接;所述交互系统包括人机交互系统和机器人与地理环境交互系统,所述人机交互系统包括按键、显示器、视觉系统、听说系统,所述视觉系统包括摄像头和图像处理器,所述摄像头与图像处理器电连接,图像处理器与主控制器电连接;所述听说系统包括麦克风、扬声器和语音处理器,所述麦克风和扬声器均与语音处理器电连接,语音处理器与主控制器电连接;所述按键和显示器分别与主控制器电连接;机器人与地理环境交互系统包括视觉导航系统、惯性导航系统和激光雷达探测器;所述视觉导航系统、惯性导航系统和激光雷达探测器均与主控制器电连接,所述电源系统包括蓄电池和变压芯片,所述蓄电池与变压芯片电连接,所述主控制器分别与车把自动变形锁定装置、后轮自动变形锁定装置、上管自动变形锁定装置、前叉上管自动变形锁定装置和连管自动变形锁定装置的电机和步进电机电连接,所述主控制器分别与前轮自动变形锁定装置、座管自动变形锁定装置、基于蜗轮蜗杆减速器的座管自动锁定装置、基于蜗轮蜗杆减速器的前叉上管自动锁定装置、基于蜗轮蜗杆减速器的后轮自动锁定装置、基于蜗轮蜗杆减速器的车把自动锁定装置、基于蜗轮蜗杆减速器的上管自动锁定装置和基于蜗轮蜗杆减速器的连管自动锁定装置的电机电连接。
说明书
技术领域
本发明属于电子信息、机器视觉、自动控制和机械设计技术领域,具体涉及一种可变形具有自主导航及行走功能的轮式双足机器人。
背景技术
人类诞生之后,主要借助于双腿不断在地球表面迁徙和探索。18世纪末双轮单车产生,19世纪末四轮汽车设计成功,这二者的出现极大拓展了人类在地表活动和探索范围。汽车在行驶速度、里程等方面远远超过单车,但汽车剥夺了人类利用自身运动天赋与周围世界交互的权利。小巧、轻便的单车则是一种可以充分发挥人类自身运动能力的交通工具。近年来,汽车高碳排放导致全球变暖,以及严重的交通雍塞等问题的出现,让人们重新认识单车的独特的存在价值。
单车是一种人类自身运动天赋和机械相结合的环保型交通工具。单车骑行需要手、脚、四肢、躯干、头部的全身性参与。运动过程中可摄取足够的氧气,燃烧囤积的脂肪,有效锻炼大脑、心脏、肺部等人体内部器官的机能。用人体生物能驱动的单车,碳排放几乎为零。用公共交通网与单车相结合是解决都市交通堵塞的最有效方式之一。目前,单车正在成为公众关注的焦点,新的使用方式被不断提出。
结合了GPS定位功能的共享单车是传统单车使用方式的重要升级。传统的私人单车易丢失,携带不方便,难以与公共交通网络融合。公用单车的出现在一定程度上解决了私人单车存在的问题。早期的公用单车为了方便管理,实行一车一桩的方式,即在使用完毕后必须送到指定的车桩。有限的车桩限制了此类公用单车的发展。安装了GPS定位芯片的无桩共享单车出现后,极大方便了使用者,2016年迅速在中国中心城市向周边城市发展,在2017年达到峰值。但随之出现的系列问题,使GPS定位共享单车发展出现阴影。
乱停乱放是制约共享单车发展的最大瓶颈。使用者到达目的地后随意将车辆停放,不正确的停车挤占了人行道,公共出入口,盲道,影响了正常交通,破坏了城市市容。因停放地点没有规律,也出现了使用者在急需时找不到共享单车的情况。此外,车企二次回收和重新投放成本大大增加,降低了车企的利润和发展空间。电子围栏、立体车库等技术手段在共享单车停放方面的应用,表面看起来是一种解决问题的方法,但实际上是对困难的妥协和技术退步。与一车一桩的公用单车没有本质差别。乱停乱放的解决需要寻找问题出现的根源。
无桩停放是GPS定位单车迅速发展的起点,也是其广受诟病的痛点。如果既能保留单车使用者到达目的地撒手不管,又能实现单车的有序停放,是共享单车得以继续生存和发展的关键。而这看似矛盾的需求,仅靠现有的技术手段和行政命令难以实现,需要给出新的问题解决方案。
全球范围内拥有私人单车的骑行爱好者超过二十亿。他们在使用完单车后也存在携带不方便,需要专用停车场地或专人照管等问题。骑单车出行在到达目的地以前,是车为人提供服务。而到达目的后,需要人照管单车,是人为单车服务。这在一定程度上减少了人希望无拘无束,自由散步行走的兴致。对拥有私人单车的骑行爱好者,无法让自己的爱车与自己身体短暂的分离,享受自由行走的乐趣。
针对共享单车既要无桩随停,又要有序管理这一主要矛盾;或单车把人送到指定地点后,需要专人照管这一问题。本发明提出了一种可变形具有自主导航及行走功能的轮式双足机器人。
发明内容
为了实现上述目的,本发明采用如下技术方案:
一种可变形具有自主导航及行走功能的轮式双足机器人,包括可变性机械本体和自主导航行走系统,所述自主导航行走系统位于可变性机械本体上,所述自主导航行走系统包括控制系统、动力系统、交互系统、电源系统、无线通信系统和卫星定位系统,所述控制系统分别与动力系统、交互系统、电源系统、无线通讯系统和卫星定位系统电连接。
所述可变形机械本体包括前轮组、后轮组、刹车器和机械骨架,所述后轮组通过后轴与机械骨架后叉一端相连,所述前轮组通过前轴与机械骨架的前叉一端相连,所述机械骨架的可变形车把与前轮组和机械骨架的可变形车把与后轮组之间均设置有刹车器;
所述机械骨架包括第一机械骨架和第二机械骨架,所述第一机械骨架包括曲柄中轴后轮传动机构、可变形车把、前叉上管变形锁定装置、前轮变形锁定装置、后轮变形锁定装置、座管变形锁定装置、上管变形锁定装置、上管、由座管A和座管B组成的座管、前叉上管、前叉、后叉、头管、车座和蓄电池,所述后叉另一端通过后轮变形锁定装置与曲柄中轴后轮传动机构的中轴安装管外壁相连,曲柄中轴后轮传动机构中轴安装管外壁设置有座管A,座管A顶部通过座管变形锁定装置与座管B相连,座管B顶部设置有车座,所述座管B侧壁与上管一端相连,多段上管通过上管变形锁定装置相连,上管另一端与头管外壁相连,头管外壁通过前轮变形锁定装置与前叉上管一端相连,所述头管顶部前叉上管伸出端设置有可变形车把,前叉上管另一端通过前叉上管变形锁定装置与前叉相连,所述前叉、后叉、座管或上管内壁设置有电源系统、控制系统、无线通讯系统和卫星定位系统,所述上管内壁设置有舵机,舵机顶部设置有机械臂,机械臂顶部设置有摄像头、麦克风和扬声器;
所述第二机械骨架包括包括曲柄中轴后轮传动机构、可变形车把、前叉上管变形锁定装置、前轮变形锁定装置、后轮变形锁定装置、座管变形锁定装置、上管变形锁定装置、上管、由座管A和座管B组成的座管、前叉上管、前叉、后叉、头管、车座、蓄电池、第一连管、第二连管和连管变形锁定装置,所述后叉另一端通过后轮变形锁定装置与曲柄中轴后轮传动机构的中轴安装管外壁相连,曲柄中轴后轮传动机构中轴安装管外壁设置有座管A,座管A顶部通过座管变形锁定装置与座管B相连,座管B顶部设置有车座,所述座管B中上部侧壁与第一连管一端相连,两段第一连管通过连管变形锁定装置相连,所述第一连管另一端与后叉一端固定安装,所述座管B侧壁与上管一端相连,多段上管通过上管变形锁定装置相连,上管另一端与头管外壁相连,头管外壁通过前轮变形锁定装置与前叉上管一端相连,所述上管上方座管B与头管之间设置有第二连管,多段第二连管通过连管变形锁定装置相连,第二连管另一端与头管侧壁固定安装,所述头管顶部前叉上管伸出端设置有可变形车把,前叉上管另一端通过前叉上管变形锁定装置与前叉相连,前叉底端通过前轴设置有前轮组,所述前叉、后叉、座管、上管、第一连管或第二连管内壁设置有电源系统、控制系统、无线通讯系统和卫星定位系统,所述上管内壁设置有舵机,舵机顶部设置有机械臂,机械臂顶部设置有摄像头、麦克风和扬声器。
所述前轮组包括前部轮胎、前部轮圈、前轮辐条、前轴、前轮电机,所述前部轮圈外壁设置有前部轮胎,所述前部轮圈内壁与前轮电机外转子外壁设置有前轮辐条,前轮电机定子设置在前轴外表面中部;所述后轮组包括后部轮胎、后部轮圈、后轮辐条、后轴、后轮电机,所述后部轮圈外壁设置有后部轮胎,所述后部轮圈内壁与后轮电机外转子外壁设置有后轮辐条,后轮电机定子设置在后轴外表面中部,所述前轮电机和后轮电机均与电源系统电连接。
所述曲柄中轴后轮传动机构包括曲柄中轴后轮链条传动机构和曲柄中轴后轮齿轮传动机构,所述曲柄中轴后轮链条传动机构包括中轴安装管、中轴、脚踏、曲柄、牙盘、飞轮和链条,所述中轴安装管内壁设置有中轴,中轴两端设置有曲柄,曲柄末端设置有脚踏,中轴外壁设置有牙盘,且牙盘位于中轴安装管和曲柄之间,所述牙盘与飞轮之间设置有链条,所述飞轮设置在后轮电机外转子一侧端盖上,且位于后叉与后轮电机外转子端盖之间;
曲柄中轴后轮齿轮传动机构包括中轴安装管、中轴、脚踏、曲柄、传动杆、第一主动锥齿轮、第一从动锥齿轮、第二主动锥齿轮、第二从动锥齿轮,所述中轴安装管内壁设置有中轴,中轴两端设置有曲柄,曲柄末端设置有脚踏,所述中轴外壁设置有第一主动锥齿轮,且第一主动锥齿轮位于中轴安装管和曲柄之间,所述第一主动锥齿轮轮齿上设置有与其啮合的第一从动锥齿轮,所述第二从动锥齿轮设置在后轮电机外转子一侧的端盖上,且位于后叉内部,所述第二从动锥齿轮轮齿上设置有与其啮合的第二主动锥齿轮,第二主动锥齿轮与第一从动锥齿轮之间设置有传动杆。
所述可变形车把包括固定把和折叠把,所述固定把两端通过车把变形锁定装置与折叠把连接,所述车把变形锁定装置包括车把手动变形锁定装置和车把自动变形锁定装置,所述车把手动变形锁定装置包括转动轴、封堵、第一棘轮、第一安装板、第一基座、第一锁杆、第一棘爪、弹簧和手轮,所述转动轴一端外表面与固定把固定安装,转动轴另一端外表面设置有折叠把,所述转动轴外侧伸出折叠把部分设置有封堵,所述转动轴外表面设置有第一棘轮,且第一棘轮位于固定把内部,折叠把外壁设置有两个第一安装板,两个第一安装板之间设置有第一基座,第一基座通孔内设置有第一锁杆,且第一锁杆轴线与第一棘轮轴线垂直设置,所述第一锁杆靠近第一棘轮一侧端部设置有第一棘爪,所述第一锁杆外表面设置有弹簧,弹簧靠近第一棘爪一端与第一棘爪固定安装,所述第一锁杆远离第一棘轮一端设置有手轮,且手轮位于第一安装板外侧;
所述车把自动变形锁定装置包括转动轴、封堵、锁定轮、变形齿轮、电机、减速器、第一锥齿轮、第一安装板、螺线圈、铁芯、弹簧、第一棘爪、限位挡板、键轴和步进电机,所述转动轴一端外表面与固定把固定安装,转动轴另一端外表面设置有折叠把,所述转动轴外侧伸出折叠把部分设置有封堵,所述转动轴外表面设置有锁定轮和变形齿轮,所述折叠把内壁设置有电机,电机输出端与减速器输入端相连,减速器输出轴末端设置有与变形齿轮啮合的第一锥齿轮,所述折叠把外壁设置有两个第一安装板,两个第一安装板之间设置有螺线圈,螺线圈内部设置有铁芯,铁芯外表面设置有弹簧,铁芯一端与第一棘爪相连,铁芯另一端与限位挡板固定,限位挡板上设置有键轴,键轴与步进电机输出轴上的键孔匹配,且步进电机位于第一安装板内侧;
基于蜗轮蜗杆减速器的车把自动变形锁定装置包括转动轴、封堵、第一棘轮、电机、箱体、蜗杆、齿轮轴、蜗轮、第一齿轮和第二齿轮,转动轴一端外表面与固定把固定安装,转动轴另一端外表面设置有折叠把,所述转动轴外侧伸出折叠把部分设置有封堵,所述转动轴外表面设置第一棘轮,所述折叠把内壁设置有电机和箱体,电机通过联轴器与蜗杆一端相连,所述箱体通过齿轮轴设置有与蜗杆啮合蜗轮,蜗轮后端齿轮轴上设置有第一齿轮,第一齿轮轮齿上设置有与其啮合的第二齿轮,第二齿轮通过齿轮轴转动安装在箱体内壁,所述第二齿轮轮齿与第一棘轮啮合。
所述后轮变形锁定装置包括后轮手动变形锁定装置、后轮自动变形锁定装置和基于蜗轮蜗杆减速器的后轮自动变形锁定装置,所述后轮手动变形锁定装置包括第二棘轮、第二安装板、第二基座、第二锁杆、弹簧、第二棘爪和手轮,所述后轮手动变形锁定装置设置在中轴安装管上,所述中轴安装管外表面中部设置有第二棘轮,中轴安装管外表面对称设置有两个第二安装板,且第二棘轮位于第二安装板之间,一端两个所述第二安装板与后叉固定安装,另一端两个所述第二安装板通过螺钉螺接有第二基座,所述第二基座通孔内穿插有第二锁杆,第二锁杆外表面设置有弹簧,第二锁杆靠近第二棘轮一侧端面设置有第二棘爪,所述弹簧靠近第二棘爪一端与第二棘爪固定安装,所述第二锁杆远离第二棘轮一端设置有手轮,且手轮位于第二安装板外侧;
所述后轮自动变形锁定装置包括第三齿轮、第二安装板、电机、减速器、第二锥齿轮、螺线圈、铁芯、弹簧、第二棘爪、限位挡板、键轴和步进电机,所述后轮自动变形锁定装置设置在中轴安装管上,所述中轴安装管外表面中部设置有第三齿轮,中轴安装管外表面对称设置有两个第二安装板,且第三齿轮位于第二安装板之间,一端两个第二安装板与后叉固定安装,所述后叉内壁设置有电机,电机输出端通过联轴器减速器输入端相连,减速器输出轴末端设置有与第三齿轮啮合的第二锥齿轮,另一端两个第二安装板之间设置有螺线圈,螺线圈内部设置有铁芯,铁芯外表面设置有弹簧,铁芯一端与第二棘爪相连,铁芯另一端与限位挡板固定,限位挡板上设置有键轴,键轴与步进电机输出轴上的键孔匹配,且步进电机位于第二安装板内侧;
基于蜗轮蜗杆减速器的后轮自动变形锁定装置包括电机、蜗杆、箱体、齿轮轴、蜗轮、小轮、大轮和第二棘轮,所述电机和箱体设置在后叉内壁上,电机输出轴通过联轴器与蜗杆一端相连,所述箱体内壁通过齿轮轴转动安装有蜗轮和小轮,且小轮位于蜗轮后端,所述小轮轮齿上设置有与其啮合的大轮,大轮齿轮上设置有与其啮合的第二棘轮,第二棘轮设置在中轴安装管上。
所述前轮变形锁定装置包括前轮手动变形锁定装置和前轮自动变形锁定装置,所述前轮手动变形锁定装置包括锁孔部分和锁舌部分,所述锁孔部分包括第一安装部、第一滑道和锁孔,所述第一安装部外侧设置有第一滑道,所述第一滑道底端设置有锁孔,所述锁孔部分通过第一安装部与前叉上管固定安装;所述锁舌部分包括第二安装部、第三锁杆、弹簧、锁舌和螺母,所述第二安装部内孔穿插有第三锁杆,所述第二安装部顶部第三锁杆伸出端外表面设置有弹簧,第三锁杆顶部设置有锁舌,弹簧一端与第二安装部上表面固定安装,弹簧另一端与锁舌底部固定安装,所述第二安装部底端第三锁杆伸出端设置有螺母,所述锁舌部分通过第二安装部与头管固定安装;
所述前轮自动变形锁定装置包括自动变形装置、锁孔部分和锁舌部分,所述自动变形装置包括壳体、电机、减速器、第四齿轮和扇形轮,所述自动变形装置通过壳体与头管固定安装,所述壳体内设置有电机,所述电机输出端与减速器输入端相连,所述减速器输出轴贯穿壳体,且输出轴末端设置有第四齿轮,所述前叉上管外表面设置有与第四齿轮啮合的扇形轮;所述锁孔部分包括第一安装部、第一滑道和锁孔,所述第一安装部外侧设置有第一滑道,所述第一滑道底端设置有锁孔,所述锁孔部分通过第一安装部与前叉上管固定安装,所述锁舌部分包括第二安装部、螺线圈、铁芯、弹簧和锁舌,所述第二安装部内设置有螺线圈,所述锁舌部分通过第二安装部固定在头管外表面,所述螺线圈中部设置有铁芯,铁芯顶端设置有锁舌,所述螺线圈底端铁芯伸出端外表面设置有弹簧,弹簧一端与铁芯底部固定,弹簧另一端抵在螺线圈底端面上。
所述前叉上管变形锁定装置包括前叉上管手动变形锁定装置、前叉上管自动变形锁定装置和基于蜗轮蜗杆减速器的上管自动变形锁定装置,所述前叉上管手动变形锁定装置包括转动轴、封堵、第三棘轮、第三安装板、第三基座、第四锁杆、第三棘爪、弹簧和手轮,所述转动轴外表面一端转动安装有前叉上管,且转动轴外侧伸出前叉上管部分设置有封堵,所述转动轴外表面另一端固定安装有前叉,所述转动轴外表面设置有第三棘轮,前叉上管外壁设置有两个第三安装板,两个第三安装板之间设置有第三基座,第三基座通孔内设置有第四锁杆,且第四锁杆轴线与第三棘轮轴线垂直设置,所述第三锁杆靠近第三棘轮一侧端部设置有第三棘爪,所述第四锁杆外表面设置有弹簧,弹簧靠近第三棘爪一端与第三棘爪固定安装,所述第四锁杆远离第三棘轮一端设置有手轮,且手轮位于第三安装板外侧;
所述前叉上管自动变形锁定装置包括转动轴、封堵、锁定轮、变形齿轮、电机、减速器、第三锥齿轮、第三安装板、螺线圈、铁芯、弹簧、第三棘爪、限位挡板、键轴和步进电机,所述转动轴外表面一端转动安装有前叉上管,且转动轴外侧伸出前叉上管部分设置有封堵,所述转动轴外表面另一端固定安装有前叉,所述转动轴外表面设置有锁定轮和变形齿轮,所述前叉内壁设置有电机,电机输出端与减速器输入端相连,减速器输出轴末端设置有与变形齿轮啮合的第三锥齿轮,所述前叉上管外壁设置有两个第三安装板,两个第三安装板之间设置有螺线圈,螺线圈内部设置有铁芯,铁芯外表面设置有弹簧,铁芯一端与第三棘爪相连,铁芯另一端与限位挡板固定,限位挡板上设置有键轴,键轴与步进电机输出轴上的键孔匹配,且步进电机位于第三安装板内侧;
基于蜗轮蜗杆减速器的前叉上管自动变形锁定装置包括转动轴、第三棘轮、封堵、电机、箱体、蜗杆、齿轮轴、蜗轮、第五齿轮和第六齿轮,所述转动轴一端焊接有前叉,所述转动轴外表面设置第三棘轮,所述转动轴另一端外表面转动安装有前叉上管,所述转动轴靠近前叉上管部分端部设置有封堵,所述前叉上管内壁设置有电机和箱体,电机通过联轴器与蜗杆一端相连,所述箱体通过齿轮轴设置有与蜗杆啮合蜗轮,蜗轮后端齿轮轴上设置有第五齿轮,第五齿轮轮齿上设置有与其啮合的第六齿轮,第六齿轮通过齿轮轴转动安装在箱体内壁,所述第六齿轮轮齿与第三棘轮啮合。
所述座管变形锁定装置包括座管手动锁定装置、座管自动锁定装置和基于蜗轮蜗杆减速器的座管自动锁定装置,所述座管手动变形锁定装置包括第四棘轮、第三安装部、第二滑道、第一锁齿、第二锁齿、弹簧、滑块、第四棘爪和锁孔,所述第三安装部设置在座管A和座管B的连接处,且座管A通过其外部的凸台与座管B内部的凹槽配合转动安装,所述第三安装部底端与座管B固定安装,且第三安装部与座管B顶部之间形成第二滑道,所述第二滑道内设置有第一锁齿和第二锁齿,所述第一锁齿和第二锁齿两端均固定在滑道上,第一锁齿两端与弹簧一端相连,弹簧另一端与滑块一端相连,滑块另一端设置有第四棘爪,所述第四棘轮设置在座管A外表面,且位于座管B内侧,所述第三安装部内壁设置有与第一锁齿对应的三个锁孔,与第二锁齿对应的三个锁孔,所述座管A外表面设置有与第四棘爪配合的第四棘轮;
所述座管自动变形锁定装置包括第三安装部、第二滑道、螺线圈、铁芯、弹簧、滑块、第四棘爪、第四棘轮、锁孔、电机和减速器,所述第三安装部设置在座管A和座管B的连接处,所述第三安装部底端与座管B顶端贴合,且第三安装部与座管B之间形成第二滑道,第二滑道内壁设置有螺线圈,螺线圈内部设置有铁芯,铁芯外壁设置有弹簧,所述铁芯另一端与滑块一端相连,滑块另一端与第四棘爪相连,所述座管A外表面设置有与第四棘爪配合的第四棘轮,所述座管A底端凸台与座管B凹槽配合,且座管A底端面与座管B凹槽底贴合,所述座管A内部设置有电机,所述电机输出端与减速器输入端相连,所述减速器输出轴末端与座管B固定安装;
基于蜗轮蜗杆减速器的座管自动锁定装置包括电机、蜗轮蜗杆减速器和转轴,所述电机输出端设置有蜗轮蜗杆减速器,蜗轮蜗杆减速器输出端通过联轴器设置有转轴,转轴末端贯穿座管A底端与座管B相连,所述座管A底端凸台与座管B顶部凹槽配合。
所述控制系统包括主控制器和自平衡控制系统,所述自平衡系统包括MEMS陀螺仪、加速度计、左电机驱动器、右电机驱动器、右电机编码器和左电机编码器,所述主控制器分别与自平衡控制系统内的MEMS陀螺仪、加速度计、左电机驱动器、右电机驱动器、右电机编码器和左电机编码器电连接;所述交互系统包括人机交互系统和机器人与地理环境交互系统,所述人机交互系统包括按键、显示器、视觉系统、听说系统,所述视觉系统包括摄像头和图像处理器,所述摄像头与图像处理器电连接,图像处理器与主控制器电连接;所述听说系统包括麦克风、扬声器和语音处理器,所述麦克风和扬声器均与语音处理器电连接,语音处理器与主控制器电连接;所述按键和显示器分别与主控制器电连接;机器人与地理环境交互系统包括视觉导航系统、惯性导航系统和激光雷达探测器;所述视觉导航系统、惯性导航系统和激光雷达探测器均与主控制器电连接,所述电源系统包括蓄电池和变压芯片,所述蓄电池与变压芯片电连接,所述主控制器分别与车把自动变形锁定装置、后轮自动变形锁定装置、上管自动变形锁定装置、前叉上管自动变形锁定装置和连管自动变形锁定装置的电机和步进电机电连接,所述主控制器分别与前轮自动变形锁定装置、座管自动变形锁定装置、基于蜗轮蜗杆减速器的座管自动锁定装置、基于蜗轮蜗杆减速器的前叉上管自动锁定装置、基于蜗轮蜗杆减速器的后轮自动锁定装置、基于蜗轮蜗杆减速器的车把自动锁定装置、基于蜗轮蜗杆减速器的上管自动锁定装置和基于蜗轮蜗杆减速器的连管自动锁定装置的电机电连接。
有益技术效果:可变形轮式双足自行走机器人在被私人拥有的情况下,骑行过程中车载导航系统可通过语音交互为骑行者导航,骑行者到达目的地后,机器人具有自主跟随的功能,骑行者可自由行走;双足自主导航机器人如果作为公共单车出现,骑行者到达目的地后,机器人可自主返航,满足使用者随意停放的需求,消除了车辆随意停放对环境的影响。可变形双足机器人可接受使用者的预约,提前到达指定的预约地点,解决了使用者找不到单车的问题;此外,机器人可根据后台管理中心的要求自主调度,提高了车辆的利用效率;在恶劣的雨雪天气可提前返回至非露天站点,维护成本大大降低。
附图说明
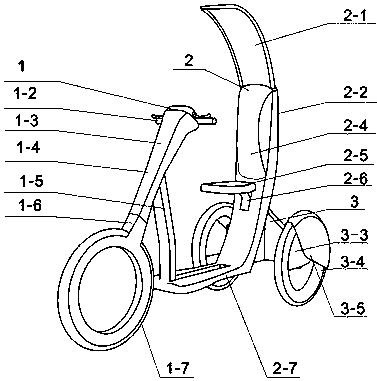
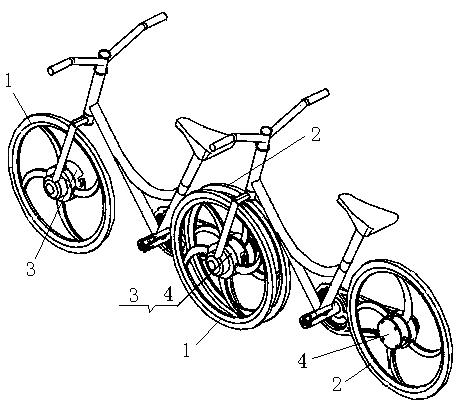
图1为本发明机器人整体结构示意图,其中曲柄中轴后轮传动机构为齿轮传动;
图2为本发明机器人整体结构示意图,其中曲柄中轴后轮传动机构为链条传动;
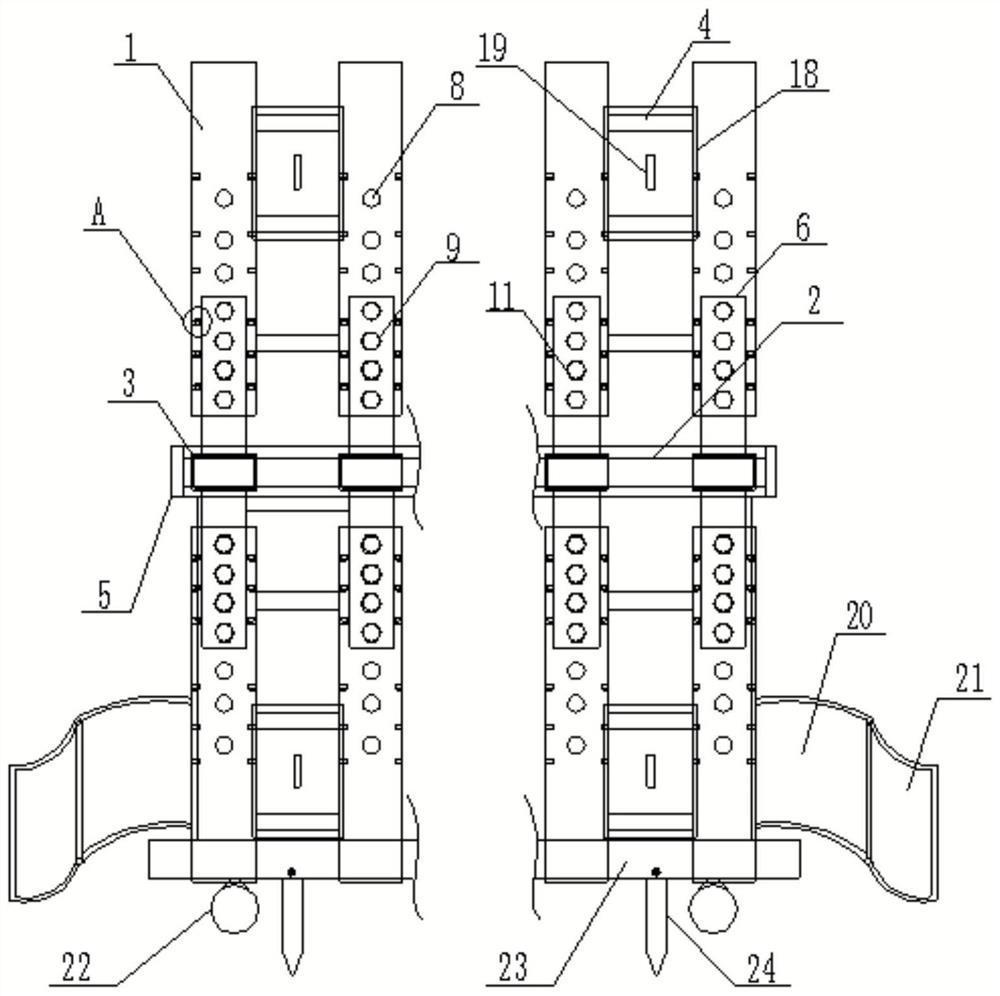
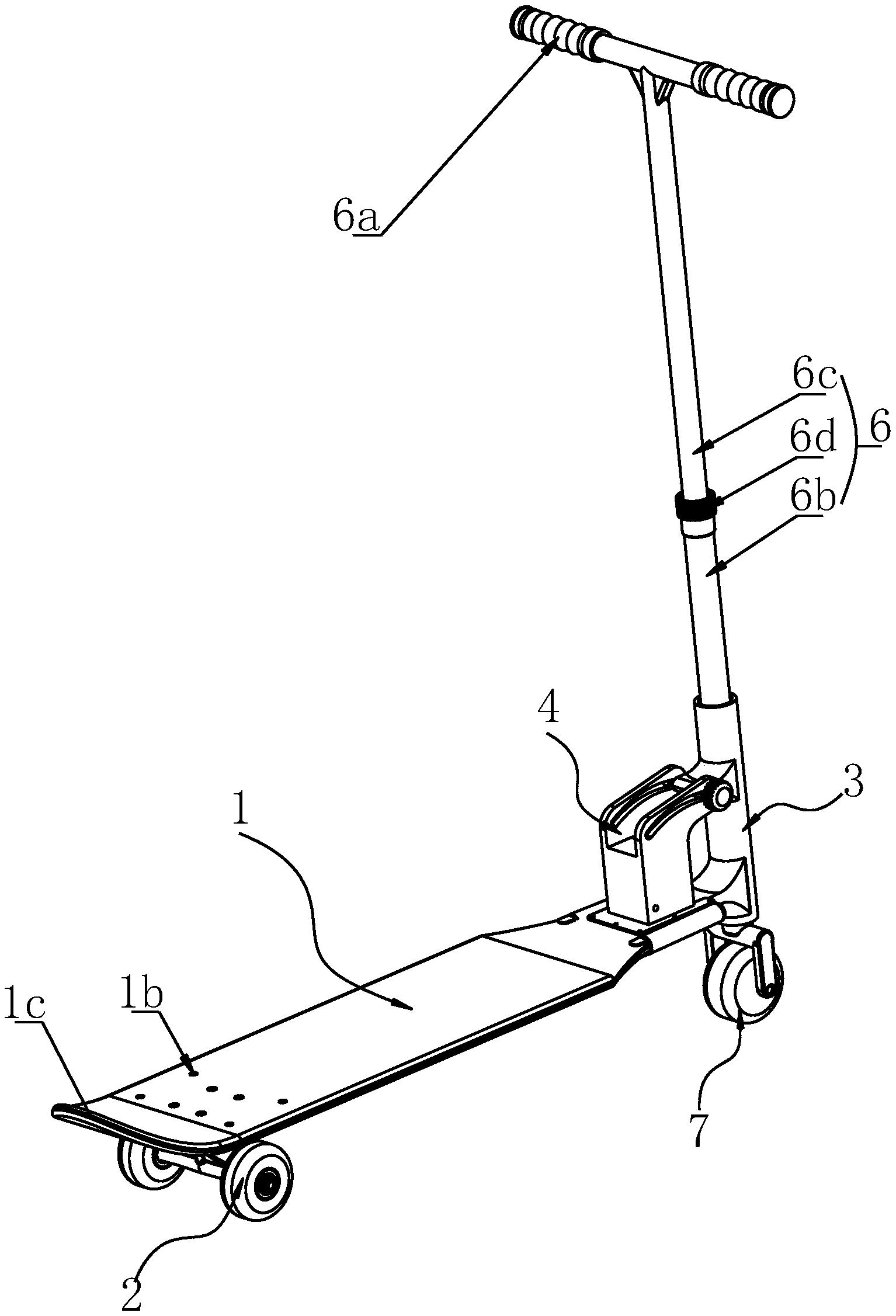
图3为本发明第二机械骨架变形结构示意图;
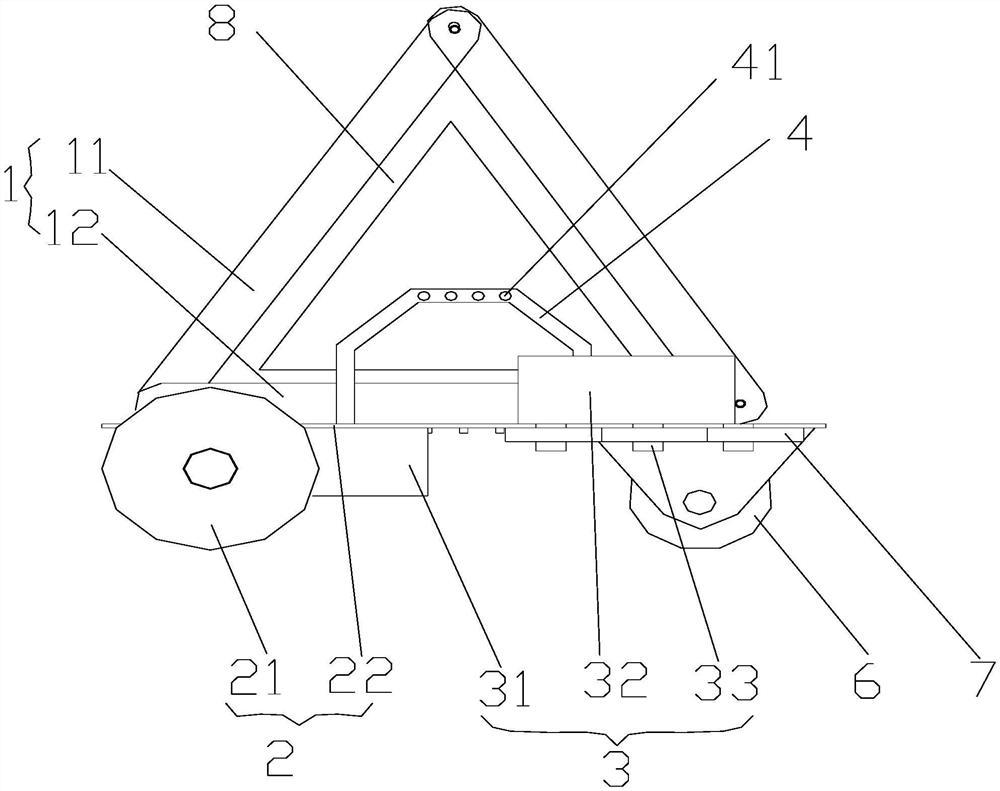
图4为本发明机器人变形后示意图,其中图3A为机器人变形后正视图,图3B为机器人变形后侧视图;
图5为本发明机器人第一种变形过程示意图;
图6为本发明机器人第二种变形过程示意图;
图7为本发明机器人前后轮间距调整示意图;
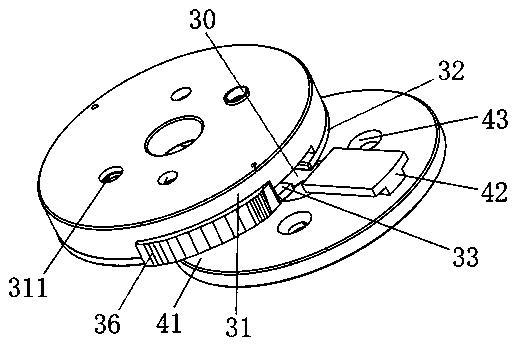
图8为本发明可变形车把部分结构示意图;
图9为本发明可变形车把手动变形锁定装置结构示意图;
图10为本发明可变形车把自动变形锁定装置结构示意图;
图11为本发明基于蜗轮蜗杆减速器的可变形车把自动变形锁定装置结构示意图
图12为本发明后轮手动变形锁定装置结构示意图;
图13为本发明后轮变形锁定装置与中轴套管安装关系示意图;
图14为本发明后轮自动变形锁定装置结构示意图;
图15为本发明基于蜗轮蜗杆减速器的后轮自动变形锁定装置结构示意图;
图16为本发明前轮手动变形锁定装置结构示意图;
图17为本发明前轮自动变形锁定装置结构示意图;
图18为本发明前叉上管手动变形锁定装置示意图;
图19为本发明前叉上管自动变形锁定装置示意图;
图20为本发明基于蜗轮蜗杆减速器的前叉上管自动变形锁定装置;
图21为本发明座管手动变形锁定装置示意图;
图22为本发明座管手动变形原理示意图;
图23为本发明座管自动变形锁定装置示意图;
图24为本发明座管自动变形原理示意图;
图25为本发明基于蜗轮蜗杆减速器的座管自动锁定装置;
图26为本发明舵机、机械臂和上管安装关系示意图;
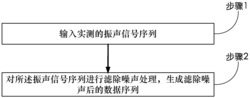
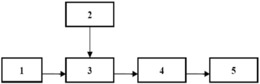
图27为本发明自主导航行走系统框图;
图28为本发明自主导航行走系统流程图。
1-可变形机械本体,101-前轮组,102-后轮组,103-曲柄中轴后轮传动机构,104-可变形车把,105-前叉上管变形锁定装置,106-前轮变形锁定装置,107-后轮变形锁定装置,108-座管变形锁定装置,109-上管变形锁定装置,110-上管,111-座管A,112-座管B,113-前叉上管,114-前叉,115-后叉,116-头管,117-车座,118-电源系统,119-舵机,120-机械臂,121-车把变形锁定装置,122-机械骨架,123-第一连管,124-第二连管,125-连管变形锁定装置,2-自主导航行走系统,3-控制系统,4-动力系统,5-交互系统,6-无线通信系统,7-卫星定位系统,8-前部轮胎,9-前部轮圈,10-前轮辐条,11-前轴,12-前轮电机,13-后部轮胎,14-后部轮圈,15-后轮辐条,16-后轴,17-后轮电机,18-中轴安装管,19-中轴,20-脚踏,21-曲柄,22-牙盘,23-飞轮,24-链条,25-传动杆,26-第一主动锥齿轮,27-第一从动锥齿轮,28-第二主动锥齿轮,29-第二从动锥齿轮,30-折叠把,31-固定把,32-转动轴,33-封堵,34-第一棘轮,35-第一安装板,36-第一基座,37-第一锁杆,38-第一棘爪,39-弹簧,40-手轮,41-锁定轮,42-变形齿轮,43-电机,44-减速器,45-第一锥齿轮,46-螺线圈,47-铁芯,48-限位挡板,49-键轴,50-步进电机,51-箱体,52-蜗杆,53-齿轮轴,54-蜗轮,55-第一齿轮,56-第二齿轮,57-蜗轮蜗杆减速器,58-第二棘轮,59-第二安装板,60-第二基座,61-第二锁杆,62-第二棘爪,63-第三齿轮,64-第二锥齿轮,65-小轮,66-大轮,67-锁孔部分,68-锁舌部分,69-第一安装部,70-第一滑道,71-锁孔,72-第二安装部,73-第三锁杆,74-锁舌,75-螺母,76-自动变形装置,77-壳体,78-第四齿轮,79-扇形轮,80-第三棘轮,81-第三安装板,82-第三基座,83-第四锁杆,84-第三棘爪,85-第三锥齿轮,86-第五齿轮,87-第六齿轮,88-第四棘轮,89-第三安装部,90-第一锁齿,91-第二锁齿,92-第二滑道,93-滑块,94-第四棘爪,95-转轴。
具体实施方式
下面结合附图和实施例对本发明做进一步的详细说明。
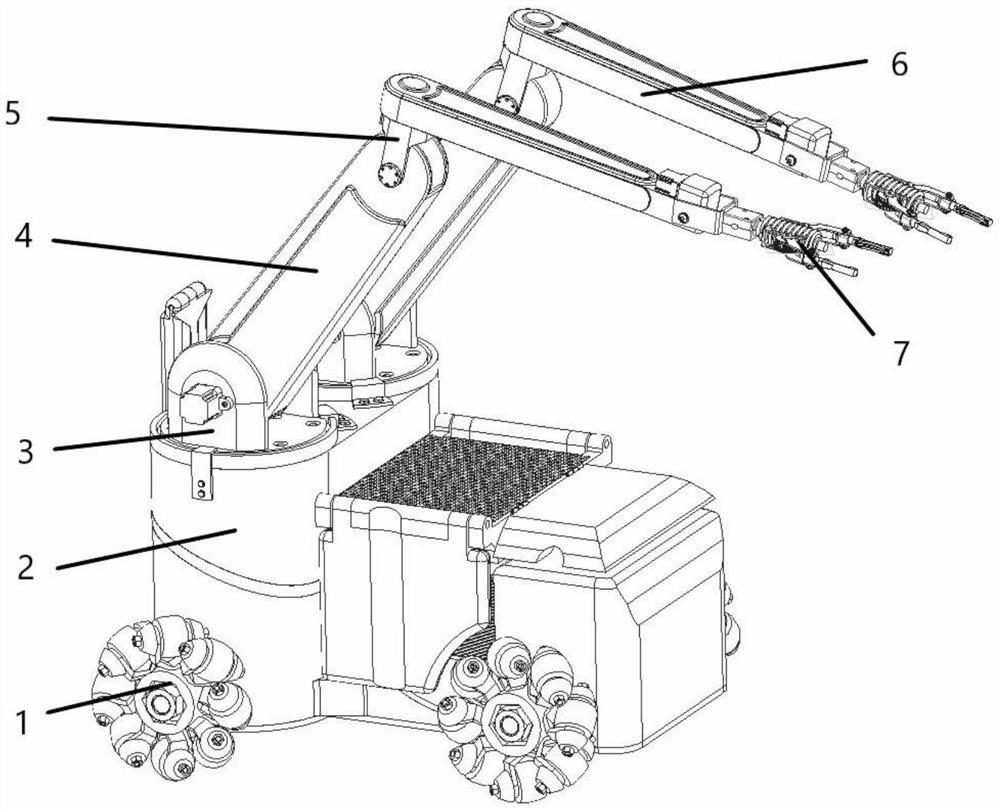
如图1-图4、图7、图26所示,一种可变形具有自主导航及行走功能的轮式双足机器人,包括可变性机械本体1和自主导航行走系统2,所述自主导航行走系统2位于可变性机械本体1上,所述自主导航行走系统2包括控制系统3、动力系统4、交互系统5、电源系统118、无线通信系统6和卫星定位系统7,所述控制系统3分别与动力系统4、交互系统5、电源系统118、无线通讯系统6和卫星定位系统7电连接,机器人可通过卫星定位系统接收卫星定位信号,利用视觉系统对周围的环境进行识别,与地图的环境进行对比,把自己的行进位置通过无线通讯系统发送到后台控制中心,或发送给主人。
所述可变形机械本体1包括前轮组101、后轮组102、刹车器和机械骨架122,所述后轮组102通过后轴16与机械骨架122的后叉115一端相连,所述前轮组101通过前轴11与机械骨架122的前叉114一端相连,所述机械骨架122的可变形车把104与前轮组101和机械骨架122的可变形车把104与后轮组102之间均设置有刹车器;
所述机械骨架122包括第一机械骨架和第二机械骨架,所述第一机械骨架包括曲柄中轴后轮传动机构103、可变形车把104、前叉上管变形锁定装置105、前轮变形锁定装置106、后轮变形锁定装置107、座管变形锁定装置108、上管变形锁定装置109、上管110、由座管A111和座管B112组成的座管、前叉上管113、前叉114、后叉115、头管116和车座117,所述后叉115另一端通过后轮变形锁定装置107与曲柄中轴后轮传动机构103的中轴安装管外壁相连,曲柄中轴后轮传动机构103中轴安装管外壁设置有座管A111,座管A111顶部通过座管变形锁定装置108与座管B112相连,座管B112顶部设置有车座117,所述座管B111侧壁与上管110一端相连,多段上管110通过上管变形锁定装置109相连,上管110另一端与头管116外壁相连,头管116外壁通过前轮变形锁定装置106与前叉上管113一端相连,所述头管116顶部前叉上管113伸出端设置有可变形车把104,前叉上管113另一端通过前叉上管变形锁定装置与前叉114相连,所述前叉114、后叉115、座管或上管110内壁设置有电源系统118、控制系统3、无线通讯系统6和卫星定位系统7,所述上管110内壁设置有舵机119,舵机119顶部设置有机械臂120,机械臂120顶部设置有摄像头、麦克风和扬声器;
所述第二机械骨架包括曲柄中轴后轮传动机构103、可变形车把104、前叉上管变形锁定装置105、前轮变形锁定装置106、后轮变形锁定装置107、座管变形锁定装置108、上管变形锁定装置109、上管110、由座管A111和座管B112组成的座管、前叉上管113、前叉114、后叉115、头管116、车座117、第一连管123、第二连管124和连管变形锁定装置125,所述后叉115另一端通过后轮变形锁定装置107与曲柄中轴后轮传动机构103的中轴安装管外壁相连,曲柄中轴后轮传动机构103中轴安装管外壁设置有座管A111,座管A111顶部通过座管变形锁定装置108与座管B112相连,座管B112顶部设置有车座117,所述座管B112中上部侧壁与第一连管123一端相连,两段第一连管123通过连管变形锁定装置125相连,第一连管123另一端与后叉115一端固定安装,所述座管B111侧壁与上管110一端相连,多段上管110通过上管变形锁定装置109相连,上管110另一端与头管116外壁相连,头管116外壁通过前轮变形锁定装置106与前叉上管113一端相连,所述上管110上方座管B112与头管116之间设置有第二连管124,多段第二连管124通过连管变形锁定装置125相连,第二连管124另一端与头管116侧壁固定安装,所述头管116顶部前叉上管113伸出端设置有可变形车把104,前叉上管113另一端通过前叉上管变形锁定装置与前叉114相连,所述前叉114、后叉115、座管、上管110、第一连管123或第二连管124内壁设置有电源系统118、控制系统3、无线通讯系统6和卫星定位系统7,所述上管110内壁设置有舵机119,舵机119顶部设置有机械臂120,机械臂120顶部设置有摄像头、麦克风和扬声器,当无需使用摄像头、麦克风和扬声器时,舵机119可带动机械臂120转动进入上管110内腔。
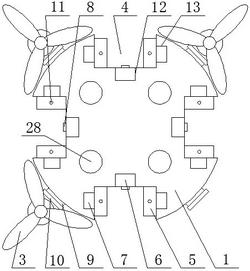
所述前轮组101包括前部轮胎8、前部轮圈9、前轮辐条10、前轴11、前轮电机12,所述前部轮圈9外壁设置有前部轮胎8,所述前部轮圈9内壁与前轮电机12外转子外壁设置有前轮辐条10,前轮电机12的定子设置在前轴11外表面中部;所述后轮组102包括后部轮胎13、后部轮圈14、后轮辐条15、后轴16、后轮电机17,所述后部轮圈14外壁设置有后部轮胎13,所述后部轮圈14内壁与后轮电机17外转子外壁设置有后轮辐条15,后轮电机17的定子设置在后轴16外表面中部,所述前轮电机12和后轮电机17均与电源系统118电连接。
所述曲柄中轴后轮传动机构103包括曲柄中轴后轮链条传动机构和曲柄中轴后轮齿轮传动机构,所述曲柄中轴后轮链条传动机构包括中轴安装管18、中轴19、脚踏20、曲柄21、牙盘22、飞轮23和链条24,所述中轴安装管18内壁设置有中轴19,中轴19两端设置有曲柄21,曲柄21末端设置有脚踏20,中轴19外壁设置有牙盘22,且牙盘22位于中轴安装管18和曲柄21之间,所述牙盘22与飞轮23之间设置有链条24,所述飞轮23设置在后轮电机17外转子一侧端盖上,且位于后叉115与后轮电机17外转子端盖之间;
曲柄中轴后轮齿轮传动机构包括中轴安装管18、中轴19、脚踏20、曲柄21、传动杆25、第一主动锥齿轮26、第一从动锥齿轮27、第二主动锥齿轮28、第二从动锥齿轮29,所述中轴安装管18内壁设置有中轴19,中轴19两端设置有曲柄21,曲柄21末端设置有脚踏20,所述中轴19外壁设置有第一主动锥齿轮26,且第一主动锥齿轮26位于中轴安装管18和曲柄21之间,所述第一主动锥齿轮26轮齿上设置有与其啮合的第一从动锥齿轮27,所述第二从动锥齿轮29设置在后轮电机17外转子一侧的端盖上,且位于后叉115内部,所述第二从动锥齿轮29轮齿上设置有与其啮合的第二主动锥齿轮28,第二主动锥齿轮28与第一从动锥齿轮27之间设置有传动杆25。
如图8-图11所示,所述可变形车把104包括固定把31和折叠把30,所述固定把31两端通过车把变形锁定装置121与折叠把30连接,所述车把变形锁定装置121包括车把手动变形锁定装置、车把自动变形锁定装置和基于蜗轮蜗杆减速器的车把自动变形锁定装置,所述车把手动变形锁定装置包括转动轴32、封堵33、第一棘轮34、第一安装板35、第一基座36、第一锁杆37、第一棘爪38、弹簧39和手轮40,所述转动轴32一端外表面与固定把31固定安装,转动轴32另一端外表面设置有折叠把30,所述转动轴32外侧伸出折叠把30部分设置有封堵33,所述转动轴32外表面设置有第一棘轮34,且第一棘轮34位于固定把31内部,折叠把30外壁设置有两个第一安装板35,两个第一安装板35之间设置有第一基座36,第一基座36通孔内设置有第一锁杆37,且第一锁杆37轴线与第一棘轮34轴线垂直设置,所述第一锁杆37靠近第一棘轮34一侧端部设置有第一棘爪38,所述第一锁杆37外表面设置有弹簧39,弹簧39靠近第一棘爪38一端与第一棘爪38固定安装,所述第一锁杆37远离第一棘轮34一端设置有手轮40,且手轮40位于第一安装板35外侧;
所述车把自动变形锁定装置包括转动轴32、封堵33、锁定轮41、变形齿轮42、电机43、减速器44、第一锥齿轮45、第一安装板35、螺线圈46、铁芯47、弹簧39、第一棘爪38、限位挡板48、键轴49和步进电机50,所述转动轴32一端外表面与固定把31固定安装,转动轴32另一端外表面设置有折叠把30,所述转动轴32外侧伸出折叠把30部分设置有封堵33,所述转动轴32外表面设置有锁定轮41和变形齿轮42,所述折叠把30内壁设置有电机43,电机43输出端与减速器44输入端相连,减速器44输出轴末端设置有与变形齿轮42啮合的第一锥齿轮45,所述折叠把30外壁设置有两个第一安装板35,两个第一安装板35之间设置有螺线圈46,螺线圈46内部设置有铁芯47,铁芯47外表面设置有弹簧39,铁芯47一端与第一棘爪38相连,铁芯47另一端与限位挡板48固定,限位挡板48上设置有键轴49,键轴49与步进电机50输出轴上的键孔匹配,且步进电机50位于第一安装板35内侧;
基于蜗轮蜗杆减速器的车把自动变形锁定装置包括转动轴32、封堵33、第一棘轮34、电机43、箱体51、蜗杆52、齿轮轴53、蜗轮54、第一齿轮55和第二齿轮56,转动轴32一端外表面与固定把31固定安装,转动轴32另一端外表面设置有折叠把30,所述转动轴32外侧伸出折叠把30部分设置有封堵33,所述转动轴32外表面设置第一棘轮34,所述折叠把30内壁设置有电机43和箱体51,电机43通过联轴器与蜗杆52一端相连,所述箱体51通过齿轮轴53设置有与蜗杆52啮合蜗轮54,蜗轮54后端齿轮轴53上设置有第一齿轮55,第一齿轮55轮齿上设置有与其啮合的第二齿轮56,第二齿轮56通过齿轮轴53转动安装在箱体51内壁,所述第二齿轮56轮齿与第一棘轮34啮合。
如图12-图15所示,所述后轮变形锁定装置107包括后轮手动变形锁定装置、后轮自动变形锁定装置和基于蜗轮蜗杆减速器的前叉上管自动变形锁定装置,所述后轮手动变形锁定装置包括第二棘轮58、第二安装板59、第二基座60、第二锁杆61、弹簧39、第二棘爪62和手轮40,所述后轮手动变形锁定装置设置在中轴安装管18上,所述中轴安装管18外表面中部设置有第二棘轮58,中轴安装管18外表面对称设置有两个第二安装板59,且第二棘轮58位于第二安装板59之间,一端两个所述第二安装板59与后叉115固定安装,另一端两个所述第二安装板59通过螺钉螺接有第二基座60,所述第二基座60通孔内穿插有第二锁杆61,第二锁杆61外表面设置有弹簧39,第二锁杆61靠近第二棘轮58一侧端面设置有第二棘爪62,所述弹簧39靠近第二棘爪62一端与第二棘爪62固定安装,所述第二锁杆61远离第二棘轮58一端设置有手轮40,且手轮40位于第二安装板59外侧;
所述后轮自动变形锁定装置包括第三齿轮63、第二安装板59、电机43、减速器44、第二锥齿轮64、螺线圈46、铁芯47、弹簧39、第二棘爪62、限位挡板48、键轴49和步进电机50,所述后轮自动变形锁定装置设置在中轴安装管18上,所述中轴安装管18外表面中部设置有第三齿轮63,中轴安装管18外表面对称设置有两个第二安装板59,且第三齿轮63位于第二安装板59之间,一端两个第二安装板59与后叉115固定安装,所述后叉115内壁设置有电机43,电机43输出端与减速器44输入端相连,减速器44输出轴末端设置有与第三齿轮63啮合的第二锥齿轮64,另一端两个第二安装板59之间设置有螺线圈46,螺线圈46内部设置有铁芯47,铁芯47外表面设置有弹簧39,铁芯47一端与第二棘爪62相连,铁芯47另一端与限位挡板48固定,限位挡板48上设置有键轴49,键轴49与步进电机50输出轴上的键孔匹配,且步进电机50位于第二安装板59内侧;
基于蜗轮蜗杆减速器的后轮自动变形锁定装置包括电机43、蜗杆52、箱体51、齿轮轴53、蜗轮54、小轮65、大轮66和第二棘轮58,所述电机43和箱体51设置在后叉115内壁上,电机43输出轴通过联轴器与蜗杆52一端相连,所述箱体51内壁通过齿轮轴53转动安装有蜗轮54和小轮65,且小轮65位于蜗轮54后端,所述小轮65轮齿上设置有与其啮合的大轮66,大轮66齿轮上设置有与其啮合的第二棘轮58,第二棘轮58设置在中轴安装管18上。
如图16和图17所示,所述前轮变形锁定装置106包括前轮手动变形锁定装置和前轮自动变形锁定装置,所述前轮手动变形锁定装置包括锁孔部分67和锁舌部分68,所述锁孔部分67包括第一安装部69、第一滑道70和锁孔71,所述第一安装部69外侧设置有第一滑道70,所述第一滑道70底端设置有锁孔71,所述锁孔71部分通过第一安装部69与前叉上管113固定安装;所述锁舌部分68包括第二安装部72、第三锁杆73、弹簧39、锁舌74和螺母75,所述第二安装部72内孔穿插有第三锁杆73,所述第二安装部72顶部第三锁杆73伸出端外表面设置有弹簧39,第三锁杆73顶部设置有锁舌74,弹簧39一端与第二安装部72上表面固定安装,弹簧39另一端与锁舌74底部固定安装,所述第二安装部72底端第三锁杆73伸出端设置有螺母75,所述锁舌74部分通过第二安装部72与头管116固定安装;
所述前轮自动变形锁定装置包括自动变形装置76、锁孔部分67和锁舌部分68,所述自动变形装置76包括壳体77、电机43、减速器44、第四齿轮78和扇形轮79,所述自动变形装置76通过壳体77与头管116固定安装,所述壳体77内设置有电机43,所述电机43输出端与减速器44输入端相连,所述减速器44输出轴贯穿壳体77,且输出轴末端设置有第四齿轮78,所述前叉上管113外表面设置有与第四齿轮78啮合的扇形轮79;所述锁孔部分67包括第一安装部69、第一滑道70和锁孔71,所述第一安装部69外侧设置有第一滑道70,所述第一滑道70底端设置有锁孔71,所述锁孔部分67通过第一安装部69与前叉上管113固定安装;所述锁舌部分68包括第二安装部72、螺线圈46、铁芯47、弹簧39和锁舌74,所述第二安装部72内设置有螺线圈46,所述锁舌部分68通过第二安装部72固定在头管116外表面,所述螺线圈46中部设置有铁芯47,铁芯47顶端设置有锁舌74,所述螺线圈46底端铁芯47伸出端外表面设置有弹簧39,弹簧39一端与铁芯47底部固定,弹簧39另一端抵在螺线圈46底端面上。
如图18-图20所示,所述前叉上管变形锁定装置105包括前叉上管手动变形锁定装置、前叉上管自动变形锁定装置和基于蜗轮蜗杆减速器的前叉上管自动变形锁定装置,所述前叉上管手动变形锁定装置包括转动轴32、封堵33、第三棘轮80、第三安装板81、第三基座82、第四锁杆83、第三棘爪84、弹簧39和手轮40,所述转动轴32外表面一端转动安装有前叉上管113,且转动轴32外侧伸出前叉上管113部分设置有封堵33,所述转动轴32外表面另一端固定安装有前叉114,所述转动轴32外表面设置有第三棘轮80,前叉上管113外壁设置有两个第三安装板81,两个第三安装板81之间设置有第三基座82,第三基座82通孔内设置有第四锁杆83,且第四锁杆83轴线与第三棘轮80轴线垂直设置,所述第四锁杆83靠近第三棘轮80一侧端部设置有第三棘爪84,所述第四锁杆83外表面设置有弹簧39,弹簧39靠近第三棘爪84一端与第三棘爪84固定安装,所述第四锁杆83远离第三棘轮80一端设置有手轮40,且手轮40位于第三安装板81外侧;
所述前叉上管自动变形锁定装置包括转动轴32、封堵33、锁定轮41、变形齿轮42、电机43、减速器44、第三锥齿轮85、第三安装板81、螺线圈46、铁芯47、弹簧39、第三棘爪84、限位挡板48、键轴49和步进电机50,所述转动轴32外表面一端转动安装有前叉上管113,且转动轴32外侧伸出前叉上管113部分设置有封堵33,所述转动轴32外表面另一端固定安装有前叉114,所述转动轴32外表面设置有锁定轮41和变形齿轮42,所述前叉上管113内壁设置有电机43,电机43输出端与减速器44输入端相连,减速器44输出轴末端设置有与变形齿轮42啮合的第三锥齿轮85,所述前叉114外壁设置有两个第三安装板81,两个第三安装板81之间设置有螺线圈46,螺线圈46内部设置有铁芯47,铁芯47外表面设置有弹簧39,铁芯47一端与第三棘爪84相连,铁芯47另一端与限位挡板48固定,限位挡板48上设置有键轴49,键轴49与步进电机50输出轴上的键孔匹配,且步进电机50位于第三安装板81内侧;
基于蜗轮蜗杆减速器的前叉上管自动变形锁定装置包括转动轴32、第三棘轮80、封堵33、电机43、箱体51、蜗杆52、齿轮轴53、蜗轮54、第五齿轮86和第六齿轮87,所述转动轴32一端焊接有前叉114,所述转动轴32外表面设置第三棘轮80,所述转动轴32另一端外表面转动安装有前叉上管113,所述转动轴32靠近前叉上管113部分端部设置有封堵33,所述前叉上管113内壁设置有电机43和箱体51,电机43通过联轴器与蜗杆52一端相连,所述箱体51通过齿轮轴53设置有与蜗杆52啮合蜗轮54,蜗轮54后端齿轮轴53上设置有第五齿轮86,第五齿轮86轮齿上设置有与其啮合的第六齿轮87,第六齿轮87通过齿轮轴53转动安装在箱体51内壁,所述第六齿轮87轮齿与第三棘轮80啮合,上管变形锁定装置109与前叉上管变形锁定装置105的结构和原理一致,再此不在重复叙述,上管变形主要是为了使变形后的双足轮式机器人处于平衡稳定的状态,保证自动行走的安全性。
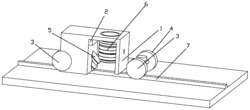
如图21-图25所示,所述座管变形锁定装置108包括座管手动锁定装置、座管自动锁定装置和基于蜗轮蜗杆减速器的座管自动锁定装置,所述座管手动变形锁定装置包括第四棘轮88、第三安装部89、第二滑道92、第一锁齿90、第二锁齿91、弹簧39、滑块93、第四棘爪94和锁孔71,所述第三安装部89设置在座管A111和座管B112的连接处,且座管A111通过其外部的凸台与座管B112内部的凹槽配合转动安装,所述第三安装部89底端与座管B112固定安装,且第三安装部89与座管B112顶部之间形成第二滑道92,所述第二滑道92内设置有第一锁齿90和第二锁齿91,且第一锁齿90和第二锁齿91两端均固定在第二滑道92上,第一锁齿90两端与弹簧39一端相连,弹簧39另一端与滑块93一端相连,滑块93另一端设置有第四棘爪94,所述第四棘轮88设置在座管A111外表面,且位于座管B112内侧,所述第三安装部89内壁设置有与第一锁齿90对应的三个锁孔71,和与第二锁齿91对应的三个锁孔71,由于第一锁齿90和第二锁齿91为弹性体,第一锁齿90和第二锁齿91可以在锁孔71内滑动,第一锁齿90和第二锁齿91为对称结构,共同作用完成锁定,所述座管A111外表面设置有与第四棘爪94配合的第四棘轮88;
所述座管自动变形锁定装置包括第三安装部89、第二滑道92、螺线圈46、铁芯47、弹簧39、滑块93、第四棘爪94、第四棘轮88、锁孔71、电机43和减速器44,所述第三安装部89设置在座管A111和座管B112的连接处,所述第三安装部89底端与座管B112顶端贴合,且第三安装部89与座管B112之间形成第二滑道92,第二滑道92内壁设置有螺线圈46,螺线圈46内部设置有铁芯47,铁芯47外壁设置有弹簧39,所述铁芯47另一端与滑块93一端相连,滑块93另一端与第四棘爪94相连,所述座管A111外表面设置有与第四棘爪94配合的第四棘轮88,所述座管A111底端凸台与座管B112凹槽配合,且座管A111底端面与座管B112凹槽底贴合,所述座管A111内部设置有电机43,所述电机43输出端与减速器44输入端相连,所述减速器44输出轴末端与座管B112固定安装;
基于蜗轮蜗杆减速器的座管自动锁定装置包括电机43、蜗轮蜗杆减速器57和转轴95,所述电机43输出端设置有蜗轮蜗杆减速器57,蜗轮蜗杆减速器57输出端通过联轴器设置有转轴95,转轴95末端贯穿座管B112底端与座管A111相连,所述座管B112底端凸台与座管A111顶部凹槽配合。
如图27和图28所示,所述控制系统3包括主控制器和自平衡控制系统,在有障碍物的情况下,主控制器驱动电机进行避障;正常行走情况下,主控制器根据图像处理器给出的路线,驱动电机进行循线操作;主控制器也可对激光雷达探测器的输入进行处理,在光线较暗的情况下,辅助图像处理器进行避障操作,所述自平衡系统包括MEMS陀螺仪、加速度计、左电机驱动器、右电机驱动器、右电机编码器和左电机编码器,所述主控制器分别与自平衡控制系统内的MEMS陀螺仪、加速度计、左电机驱动器、右电机驱动器、右电机编码器和左电机编码器电连接;所述交互系统5包括人机交互系统和机器人与地理环境交互系统,所述人机交互系统包括按键、显示器、视觉系统、听说系统,所述视觉系统包括摄像头和图像处理器,所述摄像头与图像处理器电连接,图像处理器与主控制器电连接,图像处理器接收单目或双目摄像头摄像头的图像输入信号,对图像信号进行处理,识别行进路线和障碍物,并把识别结果送给主控制器;所述听说系统包括麦克风、扬声器和语音处理器,所述麦克风和扬声器均与语音处理器电连接,语音处理器与主控制器电连接,语音处理器接收机器人使用者的麦克风语音输入,对其进行识别,转换成机器代码,根据应答策略,给出回应,并传输给扬声器输出;所述按键和显示器分别与主控制器电连接;机器人与地理环境交互系统包括视觉导航系统、惯性导航系统和激光雷达探测器;所述视觉导航系统、惯性导航系统和激光雷达探测器均与主控制器电连接,所述电源系统118包括蓄电池和变压芯片,所述蓄电池与变压芯片电连接,蓄电池通过变压芯片对电能进行变压、整流后给各系统供电,所述主控制器分别与车把自动变形锁定装置、后轮自动变形锁定装置、上管自动变形锁定装置、前叉上管自动变形锁定装置和连管自动变形锁定装置的电机43和步进电机50电连接,所述主控制器分别与前轮自动变形锁定装置、座管自动变形锁定装置、基于蜗轮蜗杆减速器的座管自动锁定装置、基于蜗轮蜗杆减速器的前叉上管自动锁定装置、基于蜗轮蜗杆减速器的后轮自动锁定装置、基于蜗轮蜗杆减速器的车把自动锁定装置、基于蜗轮蜗杆减速器的上管自动锁定装置和基于蜗轮蜗杆减速器的连管自动锁定装置的电机43电连接,所述可变形双轮机器人是一个典型的倒立摆系统,主控制器采集MEMS陀螺仪和加速度计融合的车体倾角信号,以及左编码器和右编码器检测的前轮组和后轮组的速度,用PID算法控制电机驱动的输出,达到车体自平衡,进而增加速度控制环,同时实现直立和行走的功能。用户可通过按键启动变形功能,机器人通过显示器显示自身的速度、位置和行走路线;
在作为公用单车的情况下,使用者可采用基于互联网的即时通信系统,通过手机或其他通信终端向数据中心发出使用需求,机器人接受指令,进行路径规划,启动卫星定位系统,从位于非人流聚集区的某基地出发,以双列并行轮直立的形式到达约定地点等待;使用者到达约定地点后,机器人通过人脸和声纹识别的方式,确认使用者,自动变形或在人的辅助下完成从并行轮到前后串行轮的转换,机器人将骑行者送达目的地后,骑行者通过手工方式完成从前后纵列轮向左右并行轮的转变,也可通过按键或语音启动变形功能,变为直立状态;机器人首先完成自我定位,定位可通过卫星定位系统,结合视觉识别与环境数据库中的特征比对来完成,然后在机载地图内确定当前位置和返回目的地,进行路径规划。路径规划可采用成熟的A
实施例1
本实施例中可变形车把、后轮、前轮、前叉上管、上管和座管均采用手动变形锁定装置。
一种可变形具有自主导航及行走功能的轮式双足机器人,包括可变性机械本体1和自主导航行走系统2,所述自主导航行走系统2位于可变性机械本体1上,所述自主导航行走系统2包括控制系统3、动力系统4、交互系统5、电源系统118、无线通信系统6和卫星定位系统7,所述控制系统3分别与动力系统4、交互系统5、电源系统118、无线通讯系统6和卫星定位系统7电连接。
所述可变形机械本体1包括前轮组101、后轮组102、刹车器和机械骨架122,所述后轮组102通过后轴16与机械骨架122的后叉115一端相连,所述前轮组101通过前轴11与机械骨架122的前叉114一端相连,所述机械骨架122的可变形车把104与前轮组101和机械骨架122的可变形车把104与后轮组102之间均设置有刹车器;
所述机械骨架122包括第一机械骨架和第二机械骨架,所述第一机械骨架包括曲柄中轴后轮传动机构103、可变形车把104、前叉上管变形锁定装置105、前轮变形锁定装置106、后轮变形锁定装置107、座管变形锁定装置108、上管变形锁定装置109、上管110、由座管A111和座管B112组成的座管、前叉上管113、前叉114、后叉115、头管116和车座117,所述后叉115另一端通过后轮变形锁定装置107与曲柄中轴后轮传动机构103的中轴安装管外壁相连,曲柄中轴后轮传动机构103中轴安装管外壁设置有座管A111,座管A111顶部通过座管变形锁定装置108与座管B112相连,座管B112顶部设置有车座117,所述座管B111侧壁与上管110一端相连,多段上管110通过上管变形锁定装置109相连,上管110另一端与头管116外壁相连,头管116外壁通过前轮变形锁定装置106与前叉上管113一端相连,所述头管116顶部前叉上管113伸出端设置有可变形车把104,前叉上管113另一端通过前叉上管变形锁定装置与前叉114相连,所述前叉114、后叉115、座管或上管110内壁设置有电源系统118、控制系统3、无线通讯系统6和卫星定位系统7,所述上管110内壁设置有舵机119,舵机119顶部设置有机械臂120,机械臂120顶部设置有摄像头、麦克风和扬声器;
所述第二机械骨架包括曲柄中轴后轮传动机构103、可变形车把104、前叉上管变形锁定装置105、前轮变形锁定装置106、后轮变形锁定装置107、座管变形锁定装置108、上管变形锁定装置109、上管110、由座管A111和座管B112组成的座管、前叉上管113、前叉114、后叉115、头管116、车座117、第一连管123、第二连管124和连管变形锁定装置125,所述后叉115另一端通过后轮变形锁定装置107与曲柄中轴后轮传动机构103的中轴安装管外壁相连,曲柄中轴后轮传动机构103中轴安装管外壁设置有座管A111,座管A111顶部通过座管变形锁定装置108与座管B112相连,座管B112顶部设置有车座117,所述座管B112中上部侧壁与第一连管123一端相连,两段第一连管123通过连管变形锁定装置125相连,所述第一连管123另一端与后叉115一端固定安装,所述座管B111侧壁与上管110一端相连,多段上管110通过上管变形锁定装置109相连,上管110另一端与头管116外壁相连,头管116外壁通过前轮变形锁定装置106与前叉上管113一端相连,所述上管110上方座管B112与头管116之间设置有第二连管124,多段第二连管124通过连管变形锁定装置125相连,第二连管124另一端与头管116侧壁固定安装,所述头管116顶部前叉上管113伸出端设置有可变形车把104,前叉上管113另一端通过前叉上管变形锁定装置与前叉114相连,所述前叉114、后叉115、座管、上管110、第一连管123或第二连管124内壁设置有电源系统118、控制系统3、无线通讯系统6和卫星定位系统7,所述上管110内壁设置有舵机119,舵机119顶部设置有机械臂120,机械臂120顶部设置有摄像头、麦克风和扬声器。
所述前轮组101包括前部轮胎8、前部轮圈9、前轮辐条10、前轴11、前轮电机12,所述前部轮圈9外壁设置有前部轮胎8,所述前部轮圈9内壁与前轮电机12外转子外壁设置有前轮辐条10,前轮电机12的定子设置在前轴11外表面中部;所述后轮组102包括后部轮胎13、后部轮圈14、后轮辐条15、后轴16、后轮电机17,所述后部轮圈14外壁设置有后部轮胎13,所述后部轮圈14内壁与后轮电机17外转子外壁设置有后轮辐条15,后轮电机17定子设置在后轴16外表面中部,所述前轮电机和后轮电机均与电源系统118电连接。
所述曲柄中轴后轮传动机构103包括曲柄中轴后轮链条传动机构和曲柄中轴后轮齿轮传动机构,所述曲柄中轴后轮链条传动机构包括中轴安装管18、中轴19、脚踏20、曲柄21、牙盘22、飞轮23和链条24,所述中轴安装管18内壁设置有中轴19,中轴19两端设置有曲柄21,曲柄21末端设置有脚踏20,中轴19外壁设置有牙盘22,且牙盘22位于中轴安装管18和曲柄21之间,所述牙盘22与飞轮23之间设置有链条24,所述飞轮23设置在后轮电机17外转子一侧端盖上,且位于后叉115与后轮电机17外转子端盖之间;
曲柄中轴后轮齿轮传动机构包括中轴安装管18、中轴19、脚踏20、曲柄21、传动杆25、第一主动锥齿轮26、第一从动锥齿轮27、第二主动锥齿轮28、第二从动锥齿轮29,所述中轴安装管18内壁设置有中轴19,中轴19两端设置有曲柄21,曲柄21末端设置有脚踏20,所述中轴19外壁设置有第一主动锥齿轮26,且第一主动锥齿轮26位于中轴安装管18和曲柄21之间,所述第一主动锥齿轮26轮齿上设置有与其啮合的第一从动锥齿轮27,所述第二从动
一种可变形具有自主导航及行走功能的轮式双足机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0