

IPC分类号 : G01C21/16,G01C21/34,G01C21/36,G05B19/042,B61C17/00,B61D11/00





专利摘要
本实用新型公开了一种矿井机车定位导航装置,包括机车主体、激光雷达装置、语音模块、树莓派模块、中央主控模块、显示模块、电源模块、惯性测量装置、里程表传感器和超声波避障模块;所述激光雷达装置和语音模块安装在机车主体的车头的顶部;所述树莓派模块、中央主控模块、显示模块和电源模块设置在机车主体的车头的内部;所述惯性测量装置、里程表传感器安装在机车主体内部;所述超声波避障模块设置在机车主体的车头上。本实用新型能够实现矿井下机车精准定位导航,减少机车运输伤亡。
权利要求
1.一种矿井机车定位导航装置,其特征在于:包括机车主体、激光雷达装置、语音模块、树莓派模块、中央主控模块、显示模块、电源模块、惯性测量装置、里程表传感器和超声波避障模块;所述激光雷达装置和语音模块安装在机车主体的车头的顶部;所述树莓派模块、中央主控模块、显示模块和电源模块设置在机车主体的车头的内部;所述惯性测量装置、里程表传感器安装在机车主体内部;所述超声波避障模块设置在机车主体的车头上。
2.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述激光雷达装置发射经过调制的红外激光信号,信号反射后被激光雷达装置的光学视觉采集系统接收;激光雷达装置内部的MCU处理器处理实时数据,计算出目标物体到激光雷达装置的距离以及当前的夹角,通过通信接口输出给外部设备。
3.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述语音模块的芯片采用XFS5152;所述语音模块将定位导航信息实时播放。
4.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述树莓派模块装有ROS平台,通过串口与中央主控模块连接,将惯性测量装置、里程表传感器和激光雷达装置的数据在ROS平台上进行处理。
5.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述央主控模块由STM32F103X芯片控制,通过串口接收惯性测量装置和里程表传感器的数据信息,并上传给树莓派模块。
6.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述显示模块采用TFT液晶屏实时显示树莓派模块所建SLAM地图。
7.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述里程表传感器的插头置于变速箱上,用于获取机车运动速度信息。
8.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述惯性测量装置置于机车主体内部的中心位置,用于获取机车姿态角信息。
9.根据权利要求1所述的一种矿井机车定位导航装置,其特征在于:所述超声波模块有两块,采用HC-SRO4芯片,置于机车主体的车头的两侧。
说明书
技术领域
本实用新型涉及定位导航技术领域,具体涉及一种矿井机车定位导航装置。
背景技术
机车运输伤亡是矿井运输事故的主要组成部分,据统计,机车运输事故死亡人数占运输事故总死亡人数的41%。其中主要原因有驾驶员在光线不足,矿井内路况复杂等。为了减少机车运输伤亡,对矿井下机车定位导航问题研究也不断深入。
目前定位的实现主要有GPS、ZigBee和视觉定位,但由于矿井下GPS不能全覆盖,光线不足,ZigBee精度不高等问题,使得矿井机车定位效果并不好。
发明内容
本实用新型所要解决的问题是:提供一种矿井机车定位导航装置,实现矿井下机车精准定位导航,减少机车运输伤亡。
本实用新型为解决上述问题所提供的技术方案为:一种矿井机车定位导航装置,包括机车主体、激光雷达装置、语音模块、树莓派模块、中央主控模块、显示模块、电源模块、惯性测量装置、里程表传感器和超声波避障模块;所述激光雷达装置和语音模块安装在机车主体的车头的顶部;所述树莓派模块、中央主控模块、显示模块和电源模块设置在机车主体的车头的内部;所述惯性测量装置、里程表传感器安装在机车主体内部;所述超声波避障模块设置在机车主体的车头上。
优选的,所述激光雷达装置发射经过调制的红外激光信号,信号反射后被激光雷达装置的光学视觉采集系统接收;激光雷达装置内部的MCU处理器处理实时数据,计算出目标物体到激光雷达装置的距离以及当前的夹角,通过通信接口输出给外部设备。
优选的,所述语音模块的芯片采用XFS5152;所述语音模块将定位导航信息实时播放。
优选的,所述树莓派模块装有ROS平台,通过串口与中央主控模块连接,将惯性测量装置、里程表传感器和激光雷达装置的数据在ROS平台上进行处理。
优选的,所述央主控模块由STM32F103X芯片控制,通过串口接收惯性测量装置和里程表传感器的数据信息,并上传给树莓派模块。
优选的,所述显示模块采用TFT液晶屏实时显示树莓派模块所建SLAM地图。
优选的,所述里程表传感器的插头置于变速箱上,用于获取机车运动速度信息。
优选的,所述惯性测量装置置于机车主体内部的中心位置,用于获取机车姿态角信息。
优选的,所述超声波模块有两块,采用HC-SRO4芯片,置于机车主体的车头的两侧。
与现有技术相比,本实用新型的优点是:本实用新型定位精准,自动导航,路径规划,灵活性强,非常人性化。
附图说明
此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
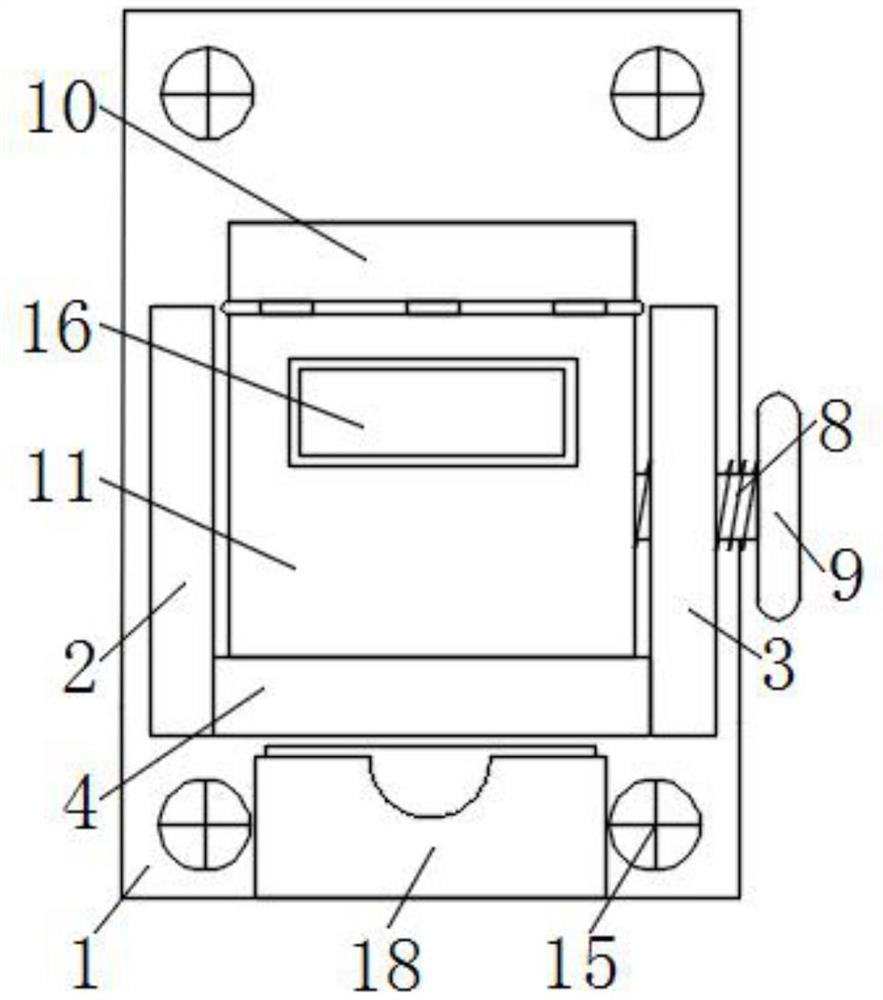
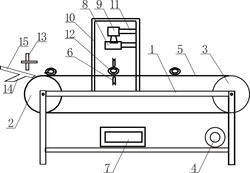
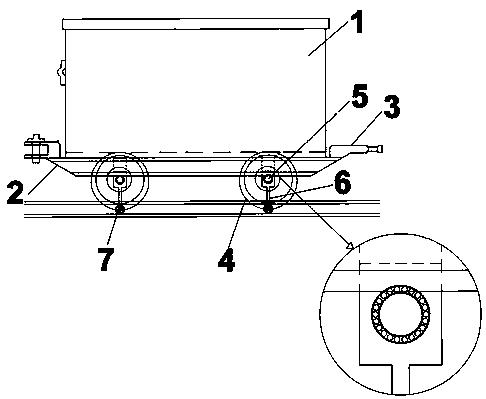
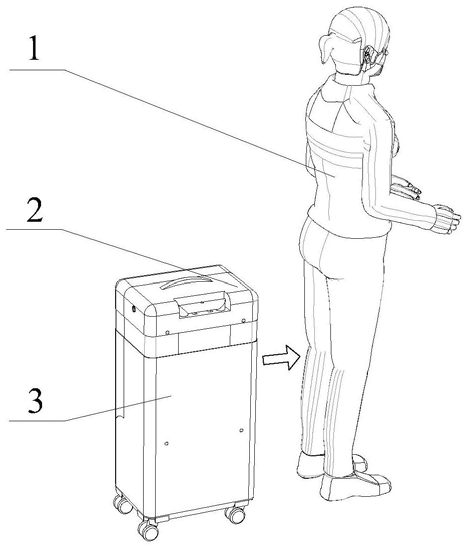
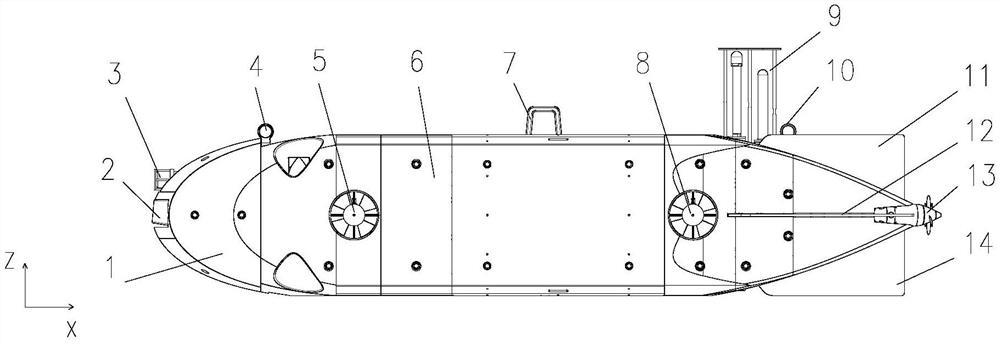
图1是本实用新型侧视图。
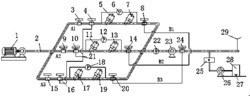
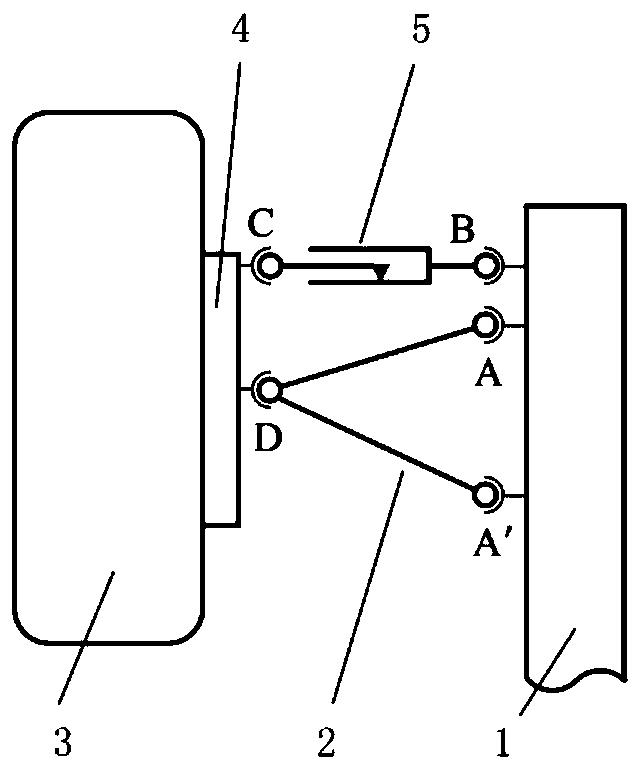
图2是本实用新型俯视图。
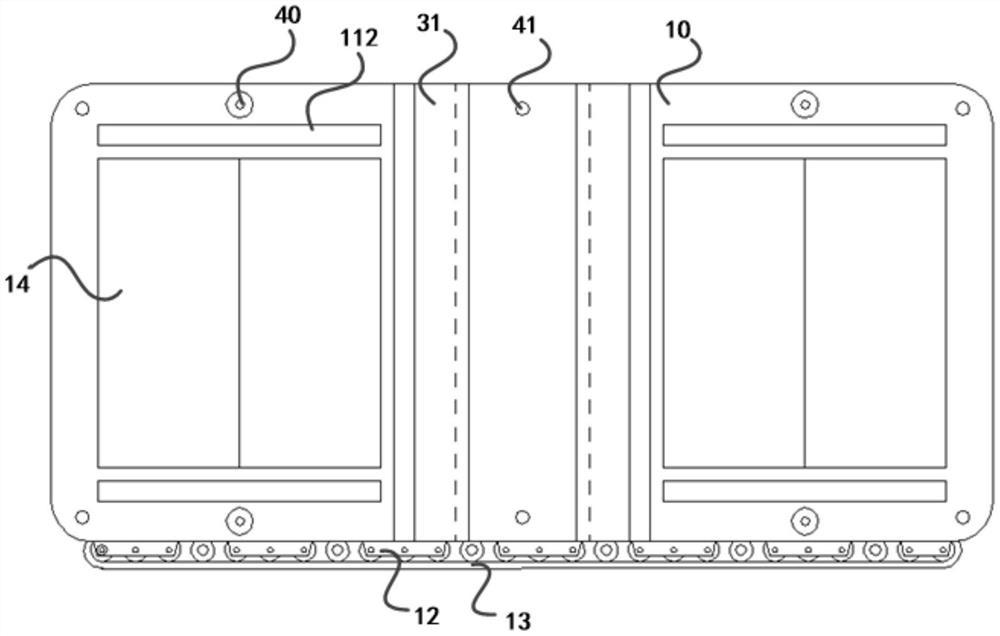
图3是树莓派模块结构示意图。
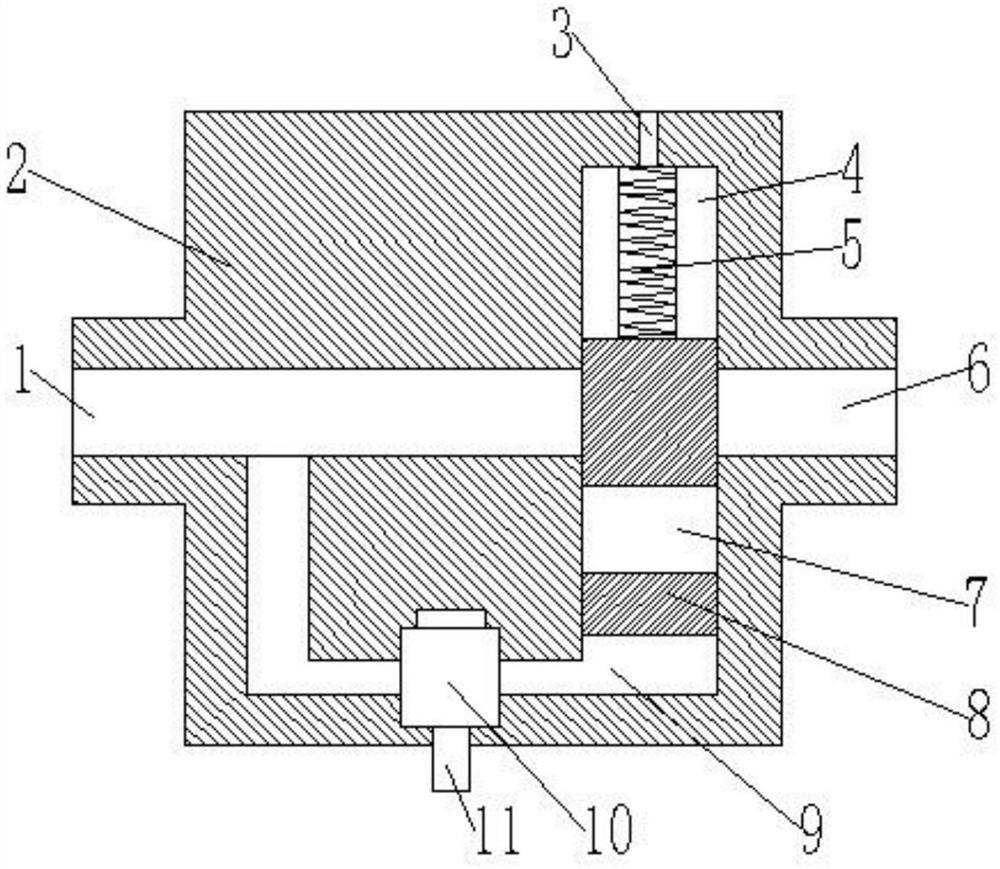
图4是中央主控模块结构示意图。
图5是本实用新型的系统框图。
附图标注:1、机车主体2、里程表传感器3、惯性测量装置4、控制台5、超声波避障模块6、电源模块7、中央主控模块8、树莓派模块9、显示模块10、激光雷达装置11、语音模块12、树莓派CPU 13、显示屏接口14、树莓派电源接口15、树莓派串口16、相机接口17、音频接口18、HDMI口19、以太网接口20、树莓派GPIO口21、STM32芯片22、里程表传感器接口23、STM32电源接口24、惯性测量装置接口25、STM32串口26、电源开关27、电源指示灯。
具体实施方式
以下将配合附图及实施例来详细说明本实用新型的实施方式,藉此对本实用新型如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
如图1至图4所示,一种矿井机车定位导航装置,包括机车主体1;里程表传感器2;惯性测量装置3;控制台4;超声波模块5;电源模块6;中央主控模块7;树莓派模块8;显示模块9;激光雷达10;语音模块11;树莓派CPU 12;显示屏接口13;树莓派电源接口14;树莓派串口15;相机接口16;音频接口17;HDMI口18;以太网接口19;树莓派GPIO口20;STM32芯片21;里程表传感器接口22;STM32电源接口23;惯性测量装置接口24;STM32串口25;电源开关26;电源指示灯27。所述机车主体1为各种模块载体,所述机车主体1车身内部装有里程表传感器1和惯性测量装置2;所述机车主体1车头顶部装有激光雷达9和语音模块10;所述机车主体1车头两侧装有两个超声波模块4;所述机车主体1车头内部装有控制台4;所述控制台4从下往上分别搭载电源模块6、中央主控模块7、树莓派模块8和显示模块9;其中,各传感器之间采用信息融合的算法,在一个多传感器系统中,各种信息融合方法将对系统所获得的各类信息进行有效的处理或推理,形成一致的结果。所述信息融合算法采用分散卡尔曼滤波(Decentralized Kalman Filter,DKF)将激光雷达、惯性测量装置和里程表传感器所获取的数据进行处理,具有强鲁棒性和容错性。
进一步的,树莓派模块8路径规划部分使用move_base包,move_base能够获取机车周围信息并生成全局与局部的代价地图,根据这些代价地图可以使机车绕开障碍物安全到达指定的位置。move_base的路径规划主要分为全局规划和局部规划,分别采用的是A*算法和DWA(Dynamic Window Approach)算法。
进一步的,所述激光雷达装置发射经过调制的红外激光信号,信号反射后被激光雷达装置的光学视觉采集系统接收;激光雷达装置内部的MCU处理器处理实时数据,计算出目标物体到激光雷达装置的距离以及当前的夹角,激光雷达装置在直流无刷电机机构的驱动下,激光雷达装置测距核心将顺时针旋转,从而实现对周围环境的360度全方位的扫描,得到所在空间平面的点云地图信息,通过通信接口输出给外部设备。
进一步的,所述语音模块的芯片采用XFS5152;所述语音模块将定位导航信息实时播放。
进一步的,所述树莓派模块装有ROS平台,通过串口与中央主控模块连接,将惯性测量装置、里程表传感器和激光雷达装置的数据在ROS平台上进行处理。
进一步的,所述央主控模块由STM32F103X芯片控制,通过串口接收惯性测量装置和里程表传感器的数据信息,并上传给树莓派模块。
进一步的,所述显示模块采用TFT液晶屏实时显示树莓派模块所建SLAM地图。
进一步的,所述里程表传感器的插头置于变速箱上,用于获取机车运动速度信息。
进一步的,所述惯性测量装置置于机车主体内部的中心位置,用于获取机车姿态角信息。
进一步的,所述超声波模块有两块,采用HC-SRO4芯片,置于机车主体的车头的两侧。
进一步的,电源模块6主要产生12V、5V、3.3V三种不同的电压,用于所述各模块中芯片工作所需电压。供电系统由各降压芯片及分压电路组成,便于生成上述各种电压。
本实用新型的工作原理:激光雷达装置发射经过调制的红外激光信号,信号反射后被激光雷达装置的光学视觉采集系统接收,计算出目标物体到激光雷达装置的距离以及当前的夹角。里程表传感器获取机车运动的速度信息。惯性测量装置获取机车姿态角信息。中央主控模块接收激光雷达、里程表传感器和惯性测量装置的数据并通过串口发送给树莓派模块。树莓派模块采用分散卡尔曼滤波(Decentralized Kalman Filter,DKF)融合中央主控传来的数据,并在ROS平台下运用图优化SLAM完成地图的建立,对机车的定位,再采用蒙特卡洛算法完成机车的导航。显示屏实时显示机车所在位置及地图。语音模块根据根据树莓派模块导航信息实时播音提醒驾驶员。
以上仅就本实用新型的最佳实施例作了说明,但不能理解为是对权利要求的限制。本实用新型不仅局限于以上实施例,其具体结构允许有变化。凡在本实用新型独立权利要求的保护范围内所作的各种变化均在本实用新型保护范围内。
一种矿井机车定位导航装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0