

IPC分类号 : H04N5/225,H04N5/247,G06K9/00,G05D3/00








专利摘要
本实用新型公开了一种在特定区域内运动训练的便携式辅助视觉伺服机器人装置,包括底座、头部外壳和转轴,底座上端安装固定了两个伺服电机,伺服电机上安装了转盘,转盘上固定了万向节,底座下端有USB接口和电源接口,头部外壳内部安装固定了长焦摄像头和广角摄像头,头部外壳下方固定了球铰,球铰和万向节通过连杆相连接。本实用新型能够跟踪拍摄运动目标,提取其运动姿态与标准姿态进行对比和评估,从而实现运动训练辅助的功能。
权利要求
1.一种特定区域内运动辅助视觉的便携式伺服机器人装置,其特征在于:包含底座(5)、头部外壳(1)、以及一端与头部外壳(1)连接,另一端固定在底座(5)上的转轴(9),底座(5)上安装了驱动机构,驱动机构包括两个伺服电机(4),伺服电机(4)输出轴上安装了转盘(10),转盘(10)上固定了万向节(3),底座(5)下端有USB接口(11)和给整个系统供电的电源接口(12),头部外壳(1)内部安装了长焦摄像头(6)、广角摄像头(7),头部外壳(1)下方固定了球铰(8),球铰(8)通过连杆(2)与万向节(3)配接。
2.根据权利要求1所述的一种特定区域内运动辅助视觉的便携式伺服机器人装置,其特征在于:伺服电机(4)上安装了转盘(10),可以实现转盘(10)顺时针和逆时针360度旋转。
3.根据权利要求1所述的一种特定区域内运动辅助视觉的便携式伺服机器人装置,其特征在于:所述转轴(9)是十字转轴,与驱动机构相配合,实现头部外壳(1)上下最大30度转动以及左右最大60度转动。
说明书
技术领域
本设备属于图像分析和运动控制技术领域,具体涉及一种在特定区域内运动辅助视觉的便携式伺服机器人装置。
背景技术
随着生活水平的提高,科学和智能的运动方式逐渐成为主流。在运动的过程中,模仿学习标准的运动姿态不仅有利于快速地掌握相关的运动技能,而且可以减少运动带来的对身体的伤害。但是,人们在运动过程中常出现运动姿态不标准且无人监督指导的问题,而相关的指导培训机构费用高昂,这对于忙碌的人们来说是一个不小的问题。因此开发一种便于携带、价格亲民的运动训练辅助设备显得很有意义。
实用新型内容
为了满足市场的现有需求,本实用新型提供了一种在特定区域内运动辅助视觉的便携式伺服机器人装置,其特征在于:包含底座、头部外壳、以及一端与头部外壳连接,另一端固定在底座上的转轴。底座上安装了驱动机构,驱动机构包括两个伺服电机,伺服电机输出轴上安装了转盘,转盘上固定了万向节,底座下端有USB接口和给整个系统供电的电源接口(12),头部外壳内部安装了长焦摄像头、广角摄像头,头部外壳下方固定了球铰,球铰通过连杆与万向节配接。
在上述的一种在特定区域内运动辅助视觉的便携式伺服机器人装置,伺服电机上安装了转盘,可以实现转盘顺时针和逆时针360度旋转。
在上述的一种在特定区域内运动辅助视觉的便携式伺服机器人装置,所述转轴是十字转轴,与驱动机构相配合,实现头部外壳上下最大30度转动以及左右最大60度转动。
本实用新型的优点是:1、本实用新型体积小,方便携带,灵活性高;2、本实用新型安装了长焦摄像头和广角摄像头,通过两个摄像头的协同工作保证拍摄图像的高清晰度;3、本实用新型采用视觉伺服技术,可以根据运动目标的位置,自行调整拍摄角度,从而实现对运动目标的跟踪拍摄。
附图说明
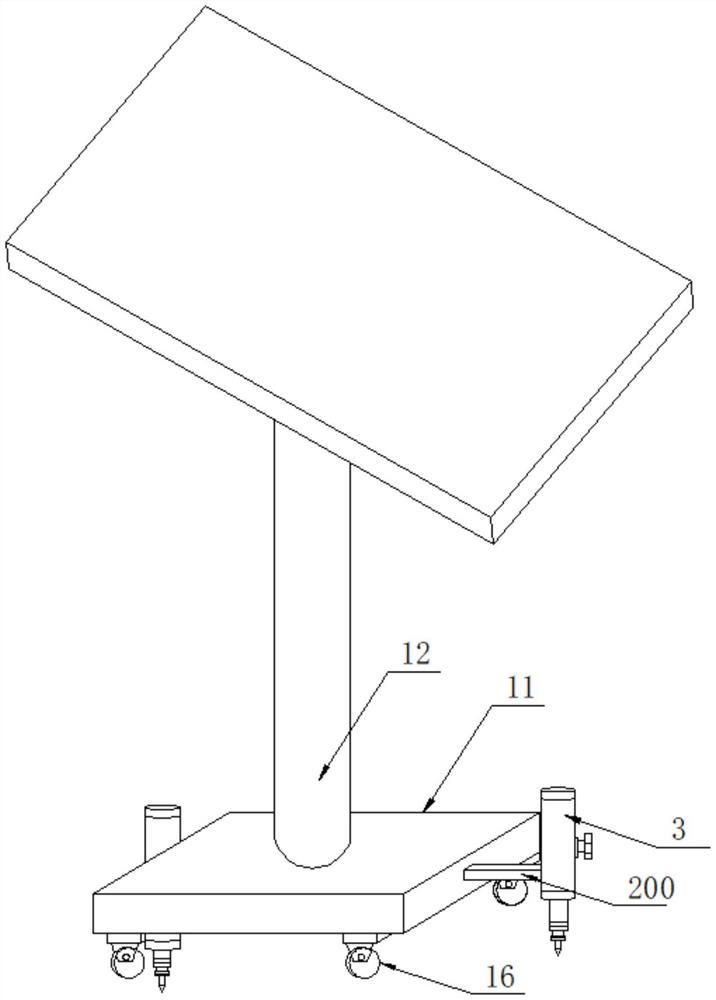
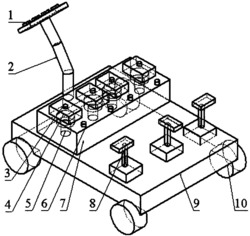
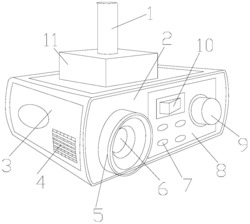
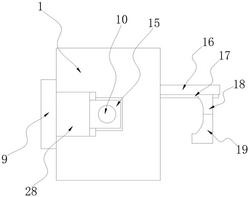
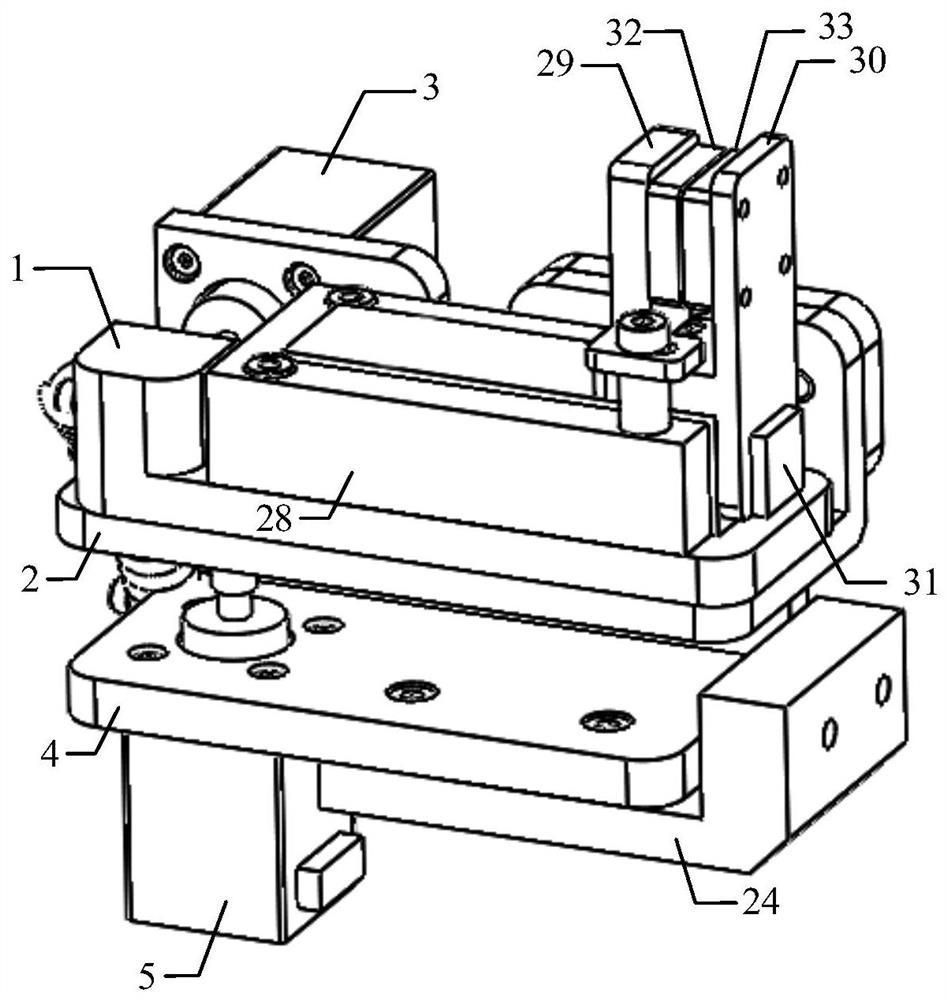
图1为机器人立体图。
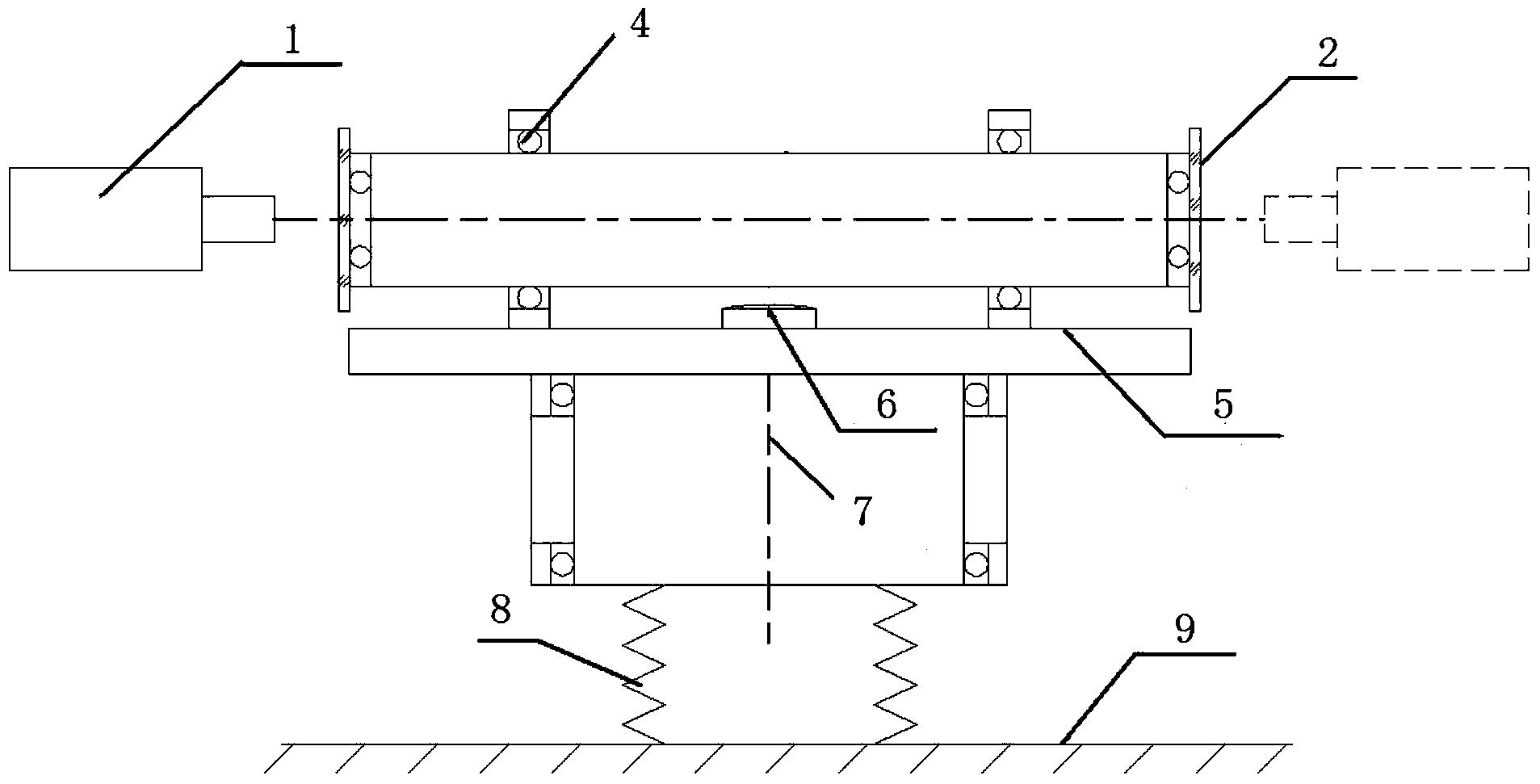
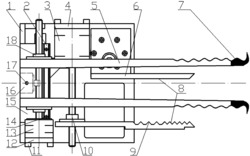
图2为机器人后视图。
具体实施方式
下面结合附图对本实用新型做进一步详细的说明。
请参阅图1-2所示,一种在特定区域内运动辅助视觉的便携式伺服机器人装置,包含底座5、头部外壳1和转轴9。底座5上端安装了两个伺服电机4,伺服电机4上安装了转盘10,转盘10上固定了万向节3,底座5下端有USB接口11和电源接口12,头部外壳1内部安装了长焦摄像头6、广角摄像头7,头部外壳1下方固定了球铰8。
所述长焦摄像头6采用锐尔威视RER-USBFHD016 mm摄像头。所述广角摄像头7采用锐尔威视RER-USBFHD012.8 mm摄像头。所述伺服电机4采用Dynamixel XL-320舵机。
所述伺服电机4上固定了转盘10,可以实现转盘10顺时针和逆时针360度旋转。所述球铰8与万向节3是通过连杆2连接。所述转轴9是十字转轴,与伺服电机4、球铰8、万向节3以及连杆2相配合,可以实现头部外壳1上下最大30度转动以及左右最大60度转动。头部外壳1和底座5是一种PVC材质的构件。
本实用新型的工作原理如下:
电源接口11连接电源后,本实用新型与电脑通过USB接口11连接,长焦摄像头6和广角摄像头7拍摄到的画面会传输到电脑端,用户在电脑端的画面上选择需要跟踪拍摄的运动目标,系统会根据目标在拍摄的画面位置调整拍摄角度,使目标时刻处于画面的中心。若目标位于画面上方,底座左侧的伺服电机4上的转盘10逆时针旋转,右侧的伺服电机4上的转盘10顺时针旋转,通过万向节3、连杆2、球铰8和转轴9,带动头部外壳1向上转动,内部的长焦摄像头6和广角摄像头7随之向上拍摄,从而使目标回到拍摄的画面中心。若目标位于画面下方,底座左侧的伺服电机4上的转盘10顺时针旋转,右侧的伺服电机4上的转盘10逆时针旋转,通过万向节3、连杆2、球铰8和转轴9,带动头部外壳1向下转动,内部的长焦摄像头6和广角摄像头7随之向下拍摄,从而使目标回到拍摄的画面中心。若目标位于画面左方,底座左侧和右侧的伺服电机4逆时针旋转,通过万向节3、连杆2、球铰8和转轴9,带动头部外壳1向左转动,内部的长焦摄像头6和广角摄像头7随之向左拍摄,从而使目标回到拍摄的画面中心。若目标位于画面右方,底座左侧和右侧的伺服电机4顺时针旋转,通过万向节3、连杆2、球铰8和转轴9,带动头部外壳1向右转动,内部的长焦摄像头6和广角摄像头7随之向右拍摄,从而使目标回到拍摄的画面中心。若目标距离摄像头的距离较远,则从广角摄像头7切换到长焦摄像头6进行拍摄。若目标距离摄像头的距离较近,则从长焦摄像头6切换到广角摄像头7进行拍摄。完成拍摄后,对目标的运动姿态提取和评估会在电脑端进行。
一种特定区域内运动辅助视觉的便携式伺服机器人装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0