







专利摘要
一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置与方法,本发明涉及地面三维空间微重力的装置与方法。本发明解决没有考虑空间机械臂在三维空间运动和操作过程中漂浮卫星基座的运动的问题。该装置包括两个工业机械臂;空间机械臂,手眼相机,捕获手爪和接口,服务和目标卫星本体模拟器以及六维力/力矩传感器组成;该方法是通过模拟目标卫星运动;确定目标卫星位置与姿态和空间机械臂各关节运动信息;计算服务卫星本体模拟器基座和工业机械臂运动信息;捕获接口在捕获手爪区域内捕获目标卫星本体模拟器;模拟实际目标卫星运动状态实现服务卫星本体模拟器的运动状态等步骤实现的。本发明应用于空间机械臂地面三维空间微重力模拟领域。
权利要求
1.一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置,其特征在于,一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置具体包括工业机械臂A(9)、工业机械臂T(10);空间机械臂(2),手眼相机(3),捕获手爪(4),捕获接口(6),服务卫星本体模拟器(7),目标卫星本体模拟器(8)以及六维力/力矩传感器(11)组成;
所述的工业机械臂A(9)末端与服务卫星本体模拟器(7)相连,服务卫星本体模拟器(7)通过连接法兰连接六维力/力矩传感器(11);六维力/力矩传感器(11)通过连接法兰连接空间机械臂(2);空间机械臂(2)通过螺栓与手眼相机(3)相连接,手眼相机(3)通过螺栓连接捕获手爪(4);
所述的工业机械臂T(10)通过连接法兰连接六维力/力矩传感器(11),六维力/力矩传感器(11)通过连接法兰连接目标卫星本体模拟器(8);目标卫星本体模拟器(8)连接捕获接口(6);
其中,接捕获接口(6)与捕获手爪(4)相匹配。
2.一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法,其特征在于:一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法具体包括以下步骤:
步骤一、模拟目标卫星的运动;利用运动学等效算法将目标卫星本体模拟器(8)通过工业机械臂T(10)模拟实际目标卫星运动状态;
步骤二、通过手眼相机(3)采集步骤一中目标卫星本体模拟器(8)相对运动信息的视觉图像,根据视觉图像确定目标卫星本体模拟器(8)的相对于手眼相机(3)的位置与卫星本体模拟器(8)的姿态;
步骤三、将步骤二确定的相对位置和姿态传递给空间机械臂(2)控制器,空间机械臂(2)控制器通过相对位置和姿态信息确定空间机械臂(2)末端运动信息;根据空间机械臂(2)末端运动信息,确定空间机械臂(2)各关节的运动信息;其中,空间机械臂(2)各关节的运动信息包括空间机械臂的关节角加速度 和空间机械臂的关节角速度 下角标m为空间机械臂;其中,空间机械臂(2)末端具体为空间机械臂(2)与手眼相机(3)的连接处;
步骤四、根据空间机械臂(2)各关节的运动信息计算服务卫星本体模拟器(7)基座的运动信息;
步骤五、根据服务卫星本体模拟器(7)基座的运动信息,通过运动学等效算法计算工业机械臂A(9)的末端运动信息;其中,工业机械臂A(9)的末端为工业机械臂A(9)与服务卫星本体模拟器(7)的连接处;
步骤六、根据视觉图像确定目标卫星本体模拟器(8)的相对于手眼相机(3)的位置的姿态判断接捕获接口(6)是否在捕获手爪(4)所在的捕获区域内;若在捕获手爪(4)所在的捕获区域内则进行步骤八;若不在,则重复步骤一至五;直至捕获接口(6)在捕获手爪(4)所在的捕获区域内为止;
步骤七、利用空间机械臂(2)的控制器控制捕获手爪(4)捕获目标卫星本体模拟器(8);
步骤八、当捕获手爪(4)捕获目标卫星本体模拟器(8)后,目标卫星本体模拟器(8)根据所受的接触力通过动力学算法来估计目标卫星本体模拟器(8)运动状态;
步骤九、根据步骤八估计的目标卫星本体模拟器(8)运动状态,通过运动学等效的方法,模拟工业机械臂T(10)受力后的实际目标卫星的运动状态;
步骤十、根据力矩传感器测量的捕获手爪(4)与目标卫星本体模拟器(8)之间接触对基座产生的外力和外力矩通过空间机械臂的动力学算法,计算出服务卫星本体模拟器(7)的运动状态,通过运动学等效算法利用工业机械臂A(9)的运动实现服务卫星本体模拟器(7)的运动状态。
3.根据权利要求2所述一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法,其特征在于:步骤一中利用运动学等效算法将目标卫星本体模拟器(8)通过工业机械臂T(10)模拟实际目标卫星运动状态具体过程为:
1)将目标卫星本体模拟器(8)在惯性空间的运动信息转换到工业机械臂T(10)末端在基座标系下的运动信息;
2)通过工业机械臂T(10)的上位机中的逆运动学算法确定工业机械臂T(10)的关节运动信息;
3)通过工业机械臂T(10)的内部总线将关节运动信息传递给工业机械臂的关节控制器,关节控制器控制工业机械臂T(10)运动。
4.根据权利要求3所述一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法,其特征在于:步骤三中根据空间机械臂(2)各关节的运动信息计算服务卫星本体模拟器(7)基座的运动信息;
(1)、根据拉格朗日方程求解得到服务卫星本体模拟器(7)、空间机械臂(2)、手眼相机(3)和捕获手爪(4)组成系统的动力学方程表示形式如下:
式中,Hb为服务卫星本体模拟器(7)的惯性张量;Hm为空间机械臂(2)耦合的惯性张量;Hbm为服务卫星本体模拟器(7)基座和空间机械臂(2)耦合的惯性张量; 为服务卫星本体模拟器(7)基座的运动加速度;cb为与服务卫星本体模拟器(7)基座运动相关的非线性力,cb包括服务卫星本体模拟器(7)运动相关的向心力和基座运动相关的哥氏力;cm为空间机械臂(2)运动相关的非线性力,cm包括空间机械臂(2)运动相关的向心力和空间机械臂(2)运动相关的哥氏力;cb、cm∈R6;Fb∈R6为作用于服务卫星本体模拟器(7)的力和力矩,Fm∈R6为空间机械臂(2)关节的驱动力矩;Jb为与服务卫星本体模拟器(7)运动相关的雅可比矩阵;Jm为与空间机械臂(2)运动相关的雅可比矩阵,空间机械臂(2)末端受到外力和外力矩Fex∈R6;
(2)根据(1)式推导出下面的公式:
式中, 分别代表服务卫星本体模拟器(7)基座的运动速度;vb代表服务卫星本体模拟器(7)基座运动的线速度;ωb分别代表服务卫星本体模拟器(7)基座运动的角速度。
5.根据权利要求4所述一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法,其特征在于:步骤四中根据服务卫星本体模拟器(7)基座的运动信息,通过运动学等效算法计算工业机械臂A(9)的末端运动信息具体过程为:
1)将服务卫星本体模拟器在惯性空间的运动信息转换到工业机械臂A(9)末端在基座标系下的运动信息;
2)通过工业机械臂A(9)的上位机中的逆运动学算法确定工业机械臂A(9)的关节运动信息;
3)通过工业机械臂A(9)的内部总线将关节运动信息传递给工业机械臂的关节控制器,关节控制器控制工业机械臂A(9)运动。
6.根据权利要求5所述一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法,其特征在于:步骤八中当捕获手爪(4)捕获目标卫星本体模拟器(8)后,目标卫星本体模拟器(8)根据所受的接触力通过动力学算法来估计卫星本体模拟器(8)运动状态的具体过程:
步骤八一、计算目标卫星本体模拟器(8)对六维力/力矩传感器的重力补偿得到目标卫星本体模拟器(8)在六维力/力矩传感器坐标系下的重力和重力矩具体公式如下:
式中,Fg代表目标卫星本体模拟器(8)在重力坐标系下的重力; 代表目标卫星本体模拟器(8)的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Ps代表目标卫星本体模拟器(8)重心位置在六维力/力矩传感器坐标系下的位置矢量;Fgs代表目标卫星本体模拟器(8)在六维力/力矩传感器坐标系下的重力;Tgs分别代表目标卫星本体模拟器(8)在六维力/力矩传感器坐标系下重力矩;
步骤八二、通过六维力/力矩传感器测量的捕获手爪(4)与目标卫星本体模拟器(8)的接触力和接触力矩与目标卫星本体模拟器(8)在六维力/力矩传感器坐标系下的重力和重力矩差值计算ft和τt,具体公式如下:
ft=Fct-Fgs
τt=Tct-Tgs
其中,Fct代表六维力/力矩传感器测量的捕获手爪(4)与目标卫星本体模拟器(8)的接触力;Tct代表六维力/力矩传感器测量的捕获手爪(4)与目标卫星本体模拟器(8)的接触力矩;ft代表作用在目标卫星本体模拟器(8)上的外力;τt代表作用在目标卫星本体模拟器(8)上的外力矩;
步骤八三、假设目标卫星本体模拟器(8)是一个单旋转刚体,在不考虑卫星轨道动力学的前提下,那么目标卫星本体模拟器(8)的动力学方程表示如下:
式中,Mt代表目标卫星本体模拟器(8)的质量; 代表目标卫星本体模拟器(8)的线加速度;ωt分别代表目标卫星本体模拟器(8)的角速度;It分别代表目标卫星本体模拟器(8)的惯量; 代表目标卫星本体模拟器(8)的角加速度。
7.根据权利要求6所述一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法,其特征在于:步骤十中根据力矩传感器测量的捕获手爪(4)与目标卫星本体模拟器(8)之间接触对基座产生的外力和外力矩通过空间机械臂的动力学算法,计算出服务卫星本体模拟器(7)的运动状态,通过运动学等效算法利用工业机械臂A(9)的运动实现服务卫星本体模拟器(7)的运动状态具体过程:
(1)计算空间机械臂(2)对六维力/力矩传感器的重力补偿得到空间机械臂(2)在六维力/力矩传感器坐标系下的重力和重力矩具体公式如下:
式中,G1代表空间机械臂(2)的第一杆件在重力坐标系下的重力;Fgs1代表空间机械臂(2)的第一杆件在六维力/力矩传感器坐标系下的重力; 代表空间机械臂(2)的第一杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs1空间机械臂(2)代表空间机械臂(2)的第一杆件在六维力/力矩传感器坐标系下的重力矩;r1代表空间机械臂(2)的第一杆件重心位置在六维力/力矩传感器坐标系下的位置矢量; 代表空间机械臂(2)的整体在六维力/力矩传感器坐标系下的重力;
G2代表空间机械臂(2)的第二杆件在重力坐标系下的重力;Fgs2代表空间机械臂(2)的第二杆件在六维力/力矩传感器坐标系下的重力; 代表空间机械臂(2)的第二杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs2代表空间机械臂(2)的第二杆件在六维力/力矩传感器坐标系下的重力矩;r2代表空间机械臂(2)的第二杆件重心位置在六维力/力矩传感器坐标系下的位置矢量; 分别代表空间机械臂(2)的整体在六维力/力矩传感器坐标系下的重力矩;
G3代表空间机械臂(2)的第三杆件在重力坐标系下的重力;Fgs3代表空间机械臂(2)的第三杆件在六维力/力矩传感器坐标系下的重力; 代表空间机械臂(2)的第三杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs3分别代表空间机械臂(2)的第三杆件在六维力/力矩传感器坐标系下的重力矩;r3代表空间机械臂(2)的第三杆件重心位置在六维力/力矩传感器坐标系下的位置矢量;
G4分别代表空间机械臂(2)的第四杆件在重力坐标系下的重力;Fgs4分别代表空间机械臂(2)的第四杆件在六维力/力矩传感器坐标系下的重力; 分别代表空间机械臂(2)的第四杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs4分别代表空间机械臂(2)的第四杆件在六维力/力矩传感器坐标系下的重力矩;r4分别代表空间机械臂(2)的第四杆件重心位置在六维力/力矩传感器坐标系下的位置矢量;
(2)通过六维力/力矩传感器测量的服务卫星本体模拟器(7)受到的接触力和接触力矩与空间机械臂(2)在六维力/力矩传感器坐标系下的重力和重力矩差值计算fb和τb,具体公式如下:
fb=Fcb-Fgs
τb=Tcb-Tgs
其中,Fcb代表六维力/力矩传感器测量的服务卫星本体模拟器(7)受到的接触力;Tcb代表六维力/力矩传感器测量的服务卫星本体模拟器(7)受到的接触力矩;
(3)、假设服务卫星本体模拟器(7)是一个刚体,在不考虑卫星轨道动力学的前提下,那么服务卫星本体模拟器(7)的动力学方程表示如下:
其中,Mb代表服务卫星本体模拟器(7)基座的质量; 代表基座运动线加速度;fb代表基座所受的力;Ib代表服务卫星本体模拟器(7)基座的惯量; 代表基座运动线角加速度;τb代表基座所受的力矩;
(4)根据服务卫星本体模拟器(7)基座的运动信息,通过运动学等效算法计算工业机械臂A(9)的末端运动信息具体过程为:
1)将服务卫星本体模拟器在惯性空间的运动信息转换到工业机械臂A(9)末端在基座标系下的运动信息;
2)通过工业机械臂A(9)的上位机中的逆运动学算法确定工业机械臂A(9)的关节运动信息;
3)通过工业机械臂A(9)的内部总线将关节运动信息传递给工业机械臂的关节控制器,关节控制器控制工业机械臂A(9)运动实现服务卫星本体模拟器(7)的运动状态。
说明书
技术领域
本发明涉及地面三维空间微重力的装置与方法,特别涉及一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置与方法。
背景技术
由于空间机械臂在太空接近和捕获目标卫星操作时,其卫星基座通常是不受控的,处于自由漂浮状态。在太空中,空间机器人系统处于微重力环境,通常不考虑地球重力对其影响,因此,空间机器人系统满足动量守恒定律。当空间机械臂运动时,其漂浮卫星基座通常会产生相应的扰动。目前,空间机械臂的测试通常是在二维的气浮平台上进行的,其通常不考虑漂浮卫星基座的运动,只是空间机械臂在二维平面空间的运动和操作,其与空间机器人在太空中真实的三维空间运动和操作有着很大的不同,空间机器人在太空中几乎不重地球重力影响,因此,它的设计通常臂杆较长,具有较大的柔性,在地面上重力环境下无法直接进行三维空间的操作,因此,需要开发一套地面三维空间微重力模拟与验证系统来再现和验证空间机器人在真实的三维空间中捕获和维修目标卫星的操作,并对相关的控制算法和硬件进行测试。
发明内容
本发明是为了解决现有的技术没有考虑空间机械臂在三维空间运动和操作过程中漂浮卫星基座的运动的问题,而提供一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置与方法。
本发明采取以下技术方案:
一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置具体包括工业机械臂A、工业机械臂T;空间机械臂,手眼相机,捕获手爪,捕获接口,服务卫星本体模拟器,目标卫星本体模拟器以及六维力/力矩传感器组成;
所述的工业机械臂A末端与服务卫星本体模拟器相连,服务卫星本体模拟器通过连接法兰连接六维力/力矩传感器;六维力/力矩传感器通过连接法兰连接空间机械臂;空间机械臂通过螺栓与手眼相机相连接,手眼相机通过螺栓连接捕获手爪;
所述的工业机械臂T通过连接法兰连接六维力/力矩传感器,六维力/力矩传感器通过连接法兰连接目标卫星本体模拟器;目标卫星本体模拟器连接捕获接口;
其中,接捕获接口与捕获手爪相匹配。
一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法具体包括以下步骤:
步骤一、模拟目标卫星的运动;利用运动学等效算法将目标卫星本体模拟器通过工业机械臂T模拟实际目标卫星运动状态;
步骤二、通过手眼相机采集步骤一中目标卫星本体模拟器相对运动信息的视觉图像,根据视觉图像确定目标卫星本体模拟器的相对于手眼相机的位置与卫星本体模拟器的姿态;
步骤三、将步骤二确定的相对位置和姿态传递给空间机械臂控制器,空间机械臂控制器通过相对位置和姿态信息确定空间机械臂末端运动信息;根据空间机械臂末端运动信息,确定空间机械臂各关节的运动信息;其中,空间机械臂各关节的运动信息包括空间机械臂的关节角加速度 和空间机械臂的关节角速度 下角标m为空间机械臂;其中,空间机械臂末端具体为空间机械臂与手眼相机的连接处;
步骤四、根据空间机械臂各关节的运动信息计算服务卫星本体模拟器基座的运动信息;
步骤五、根据服务卫星本体模拟器基座的运动信息,通过运动学等效算法计算工业机械臂A的末端运动信息;其中,工业机械臂A的末端为工业机械臂A与服务卫星本体模拟器的连接处;
步骤六、根据视觉图像确定目标卫星本体模拟器的相对于手眼相机的位置的姿态判断接捕获接口是否在捕获手爪所在的捕获区域内;若在捕获手爪所在的捕获区域内则进行步骤八;若不在,则重复步骤一至五;直至捕获接口在捕获手爪所在的捕获区域内为止;
步骤七、利用空间机械臂的控制器控制捕获手爪捕获目标卫星本体模拟器;
步骤八、当捕获手爪捕获目标卫星本体模拟器后,目标卫星本体模拟器根据所受的接触力通过动力学算法来估计目标卫星本体模拟器运动状态;
步骤九、根据步骤八估计的目标卫星本体模拟器运动状态,通过运动学等效的方法,模拟工业机械臂T受力后的实际目标卫星的运动状态;
步骤十、根据力矩传感器测量的捕获手爪与目标卫星本体模拟器之间接触对基座产生的外力和外力矩通过空间机械臂的动力学算法,计算出服务卫星本体模拟器的运动状态,通过运动学等效算法利用工业机械臂A的运动实现服务卫星本体模拟器的运动状态。
本发明有益效果:
本发明涉及一种空间一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置与方法,属于空间机械臂技术领域。
在地面上三维空间微重力模拟与验证方法,用于进行空间机器人捕获运动目标卫星的三维空间模拟和再现的实验与测试。
1、本发明可以真实再现在三维空间里空间机器人捕获运动目标卫星的整个过程;
2、本发明可以模拟目标卫星的自旋或翻滚运动;
3、本发明可以模拟空间机器人运动过程中的漂浮卫星基座的扰动情况;
4、本发明可以验证空间机器人的相关运动控制和算法的可靠性;
5、本发明可以验证空间机器人部分真实硬件的特性;
6、本发明该系统可以用于空间机械臂对运动目标捕获的接触或在轨更换ORU操作的任务验证如图7(a)~图11(f)。
附图说明
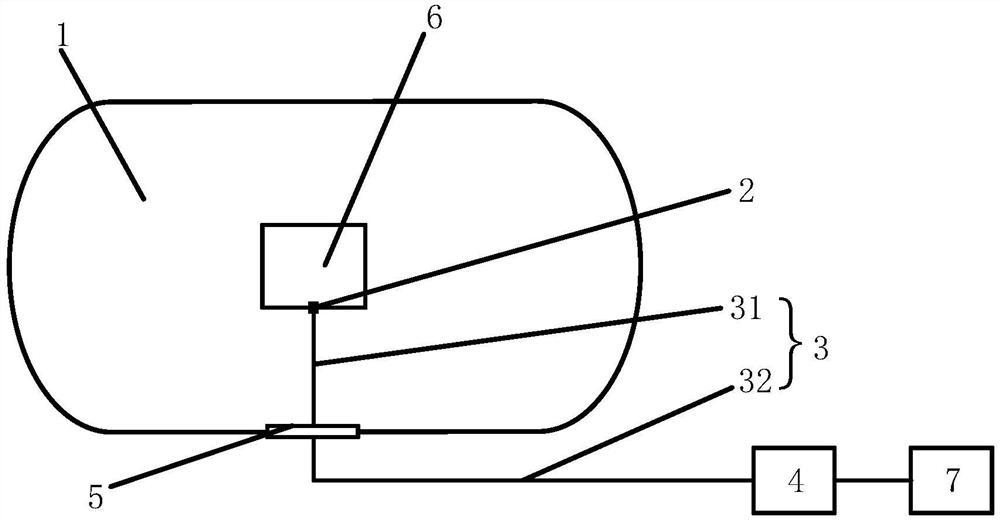
图1为具体实施方式三提出的工业机器人末端的空间机械臂对六维力或力矩传感器的重力补偿原理示意图即;其中,
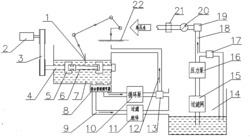
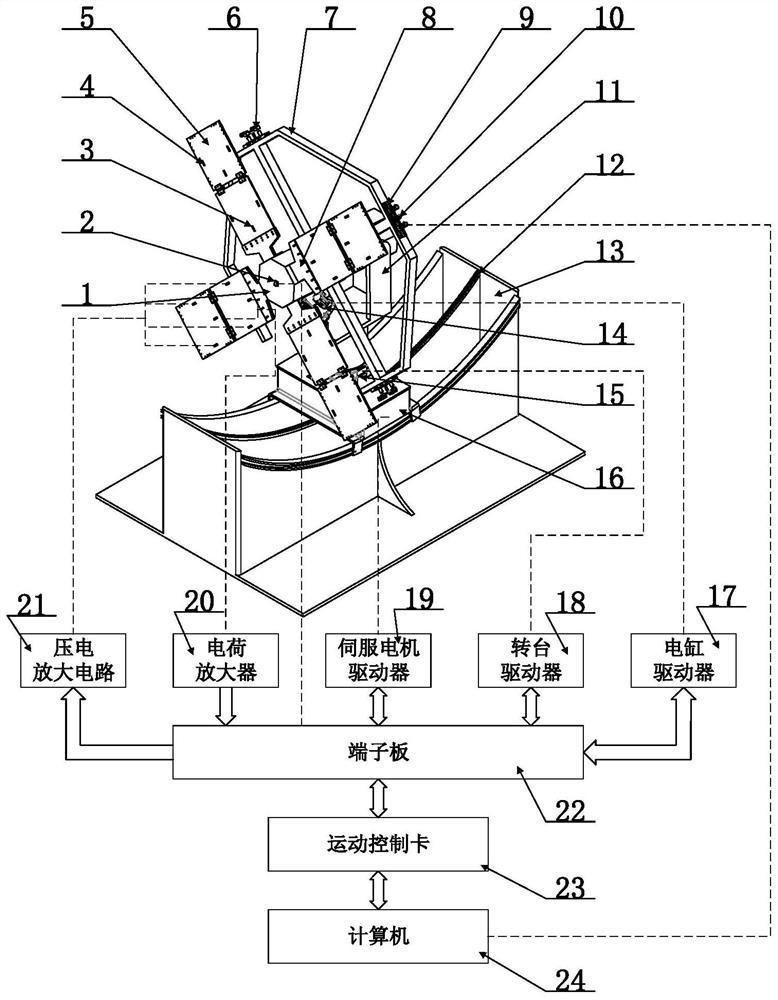
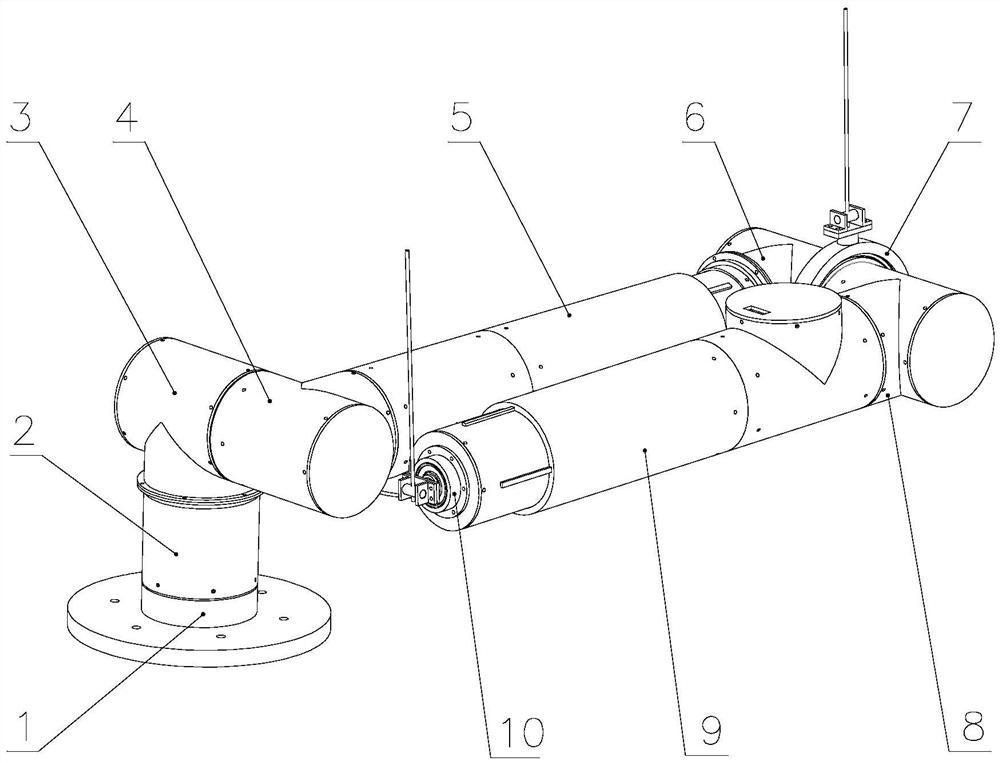
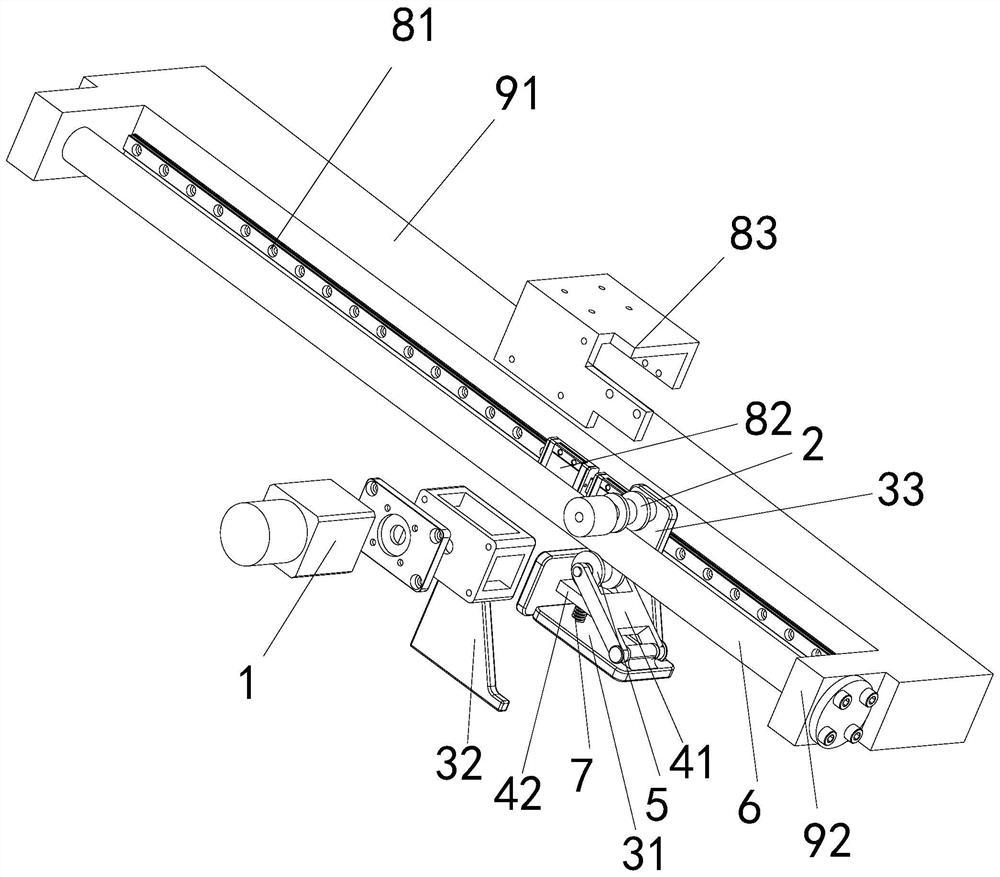
图2为具体实施方式一提出的基于硬件在环的空间机器人地面三维微重力验证系统的硬件结构框图;其中,2是空间机械臂,3是手眼相机,4是捕获手爪,6是捕获接口,7是服务卫星本体模拟器,8是目标卫星本体模拟器,9是工业机器人A,10是工业机器人T,11是六维力/力矩传感器;
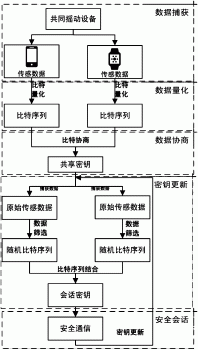
图3为具体实施方式一提出的基于硬件在环的空间机器人地面三维微重力验证系统的软件结构框图;其中,12是视觉处理计算机,13是空间机械臂控制器,16工业机器人A控制器,17工业机器人A关节控制器,22工业机器人T控制器,23工业机器人T关节控制器
图4为具体实施方式一提出的基于硬件在环的空间机器人捕获目标卫星的地面三维微重力验证系统实现原理框图;
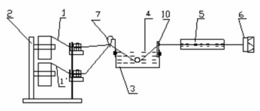
图5为具体实施方式三提出的目标卫星在空间微重力环境下的运动模拟和再现的实现框图;
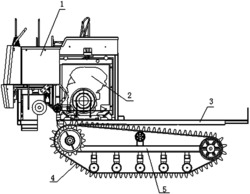
图6为具体实施方式二提出的空间机器人在空间微重力环境下的运动模型再现的实现框图;
图7(a)为具体实施方式一提出的目标卫星本体模拟器相对于手眼相机在x方向的位置随时间变化的曲线,其中,横轴为时间纵轴为目标卫星本体模拟器相对于手眼相机在x方向的位置
图7(b)为具体实施方式一提出的目标卫星本体模拟器相对于手眼相机在y方向的位置随时间变化的曲线,其中,横轴为时间纵轴为目标卫星本体模拟器相对于手眼相机在y方向的位置
图7(c)为具体实施方式一提出的目标卫星本体模拟器相对于手眼相机在z方向的位置随时间变化的曲线此图名称,其中,横轴为时间纵轴为目标卫星本体模拟器相对于手眼相机在z方向的位置
图7(d)为具体实施方式一提出的目标卫星本体模拟器相对于手眼相机绕z轴的姿态随时间变化的曲线此图名称,其中,横轴为时间纵轴为目标卫星本体模拟器相对于手眼相机绕z轴的姿态
图7(e)为具体实施方式一提出的目标卫星本体模拟器相对于手眼相机绕y轴的姿态随时间变化的曲线此图名称,其中,横轴为时间纵轴为目标卫星本体模拟器相对于手眼相机绕y轴的姿态
图7(f)为具体实施方式一提出的目标卫星本体模拟器相对于手眼相机绕x轴的姿态随时间变化的曲线此图名称,其中,横轴为时间纵轴为目标卫星本体模拟器相对于手眼相机绕x轴的姿态
图8(a)为具体实施方式一提出的空间机械臂末端在其惯性坐标系下的x方向变化曲线图;
图8(b)为具体实施方式一提出的空间机械臂末端在其惯性坐标系下的y方向变化曲线图;
图8(c)为具体实施方式一提出的空间机械臂末端在其惯性坐标系下的z方向变化曲线图;
图9(a)为具体实施方式一提出的空间机械臂末端在其惯性坐标系下的绕x轴姿态角变化曲线图;
图9(b)为具体实施方式一提出的空间机械臂末端在其惯性坐标系下的绕y轴姿态角变化曲线图;
图9(c)为具体实施方式一提出的空间机械臂末端在其惯性坐标系下的绕y轴姿态角变化曲线图;
图10(a)为具体实施方式一提出的空间机械臂第一关节的期望关节角和实际关节角的变化曲线;
图10(b)为具体实施方式一提出的空间机械臂第二关节的期望关节角和实际关节角的变化曲线;
图10(c)为具体实施方式一提出的空间机械臂第三关节的期望关节角和实际关节角的变化曲线;
图10(d)为具体实施方式一提出的空间机械臂第四关节的期望关节角和实际关节角的变化曲线;
图10(e)为具体实施方式一提出的空间机械臂第五关节的期望关节角和实际关节角的变化曲线;
图10(f)为具体实施方式一提出的空间机械臂第六关节的期望关节角和实际关节角的变化曲线;
图11(a)为具体实施方式一提出的空间机械臂的服务卫星模拟器基座位姿的x方向变化曲线示意图;
图11(b)为具体实施方式一提出的空间机械臂的服务卫星模拟器基座位姿的y方向变化曲线示意图;
图11(c)为具体实施方式一提出的空间机械臂的服务卫星模拟器基座位姿的z方向变化曲线示意图;
图11(d)为具体实施方式一提出的空间机械臂的服务卫星模拟器基座位姿的x欧拉角变化曲线示意图;
图11(e)为具体实施方式一提出的空间机械臂的服务卫星模拟器基座位姿的y欧拉角变化曲线示意图;
图11(f)为具体实施方式一提出的空间机械臂的服务卫星模拟器基座位姿的z欧拉角变化曲线示意图。
具体实施方式
具体实施方式一:本实施方式的一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置具体包括工业机械臂A9、工业机械臂T10;空间机械臂2,手眼相机3,捕获手爪4,捕获接口6,服务卫星本体模拟器7,目标卫星本体模拟器8以及六维力/力矩传感器11组成如图2;
本实施方式效果:
本实施方式涉及一种空间一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置与方法,属于空间机械臂技术领域。
在地面上三维空间微重力模拟与验证方法,用于进行空间机器人捕获运动目标卫星的三维空间模拟和再现的实验与测试。
1、本实施方式可以真实再现在三维空间里空间机器人捕获运动目标卫星的整个过程;
2、本实施方式可以模拟目标卫星的自旋或翻滚运动;
3、本实施方式可以模拟空间机器人运动过程中的漂浮卫星基座的扰动情况;
4、本实施方式可以验证空间机器人的相关运动控制和算法的可靠性;
5、本实施方式可以验证空间机器人部分真实硬件的特性;
6、本实施方式该系统可以用于空间机械臂对运动目标捕获的接触或在轨更换ORU操作的任务验证如图7(a)~图11(f)。
具体实施方式二:本实施方式与具体实施方式一不同的是:所述的工业机械臂A9末端与服务卫星本体模拟器7相连,服务卫星本体模拟器7通过连接法兰连接六维力/力矩传感器11;六维力/力矩传感器11通过连接法兰连接空间机械臂2;空间机械臂2通过螺栓与手眼相机3相连接,手眼相机3通过螺栓连接捕获手爪4;
所述的工业机械臂T10通过连接法兰连接六维力/力矩传感器1,六维力/力矩传感器11通过连接法兰连接目标卫星本体模拟器8;目标卫星本体模拟器8连接捕获接口6,
其中,接捕获接口6与捕获手爪4相匹配;所述的工业机械臂A9为ABB公司生产的型号为IRB6640-235;所述的工业机械臂T10为ABB公司的生产的型号IRB6640-235;
所述的空间机械臂2主要由关节和连杆组成,所述的关节由电机、谐波减速器、绝对位置传感器、关节力矩传感器以及关节控制器等组成;
所述的六维力/力矩传感器11具体为ATI的Delta六轴力或力矩传感器。其它步骤及参数与具体实施方式一相同。
具体实施方式三:本实施方式与具体实施方式一或二不同的是:一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的实现方法具体包括以下步骤:
步骤一、模拟目标卫星的运动;利用运动学等效算法将目标卫星本体模拟器8通过工业机械臂T10模拟实际目标卫星运动状态;
步骤二、通过手眼相机3采集步骤一中目标卫星本体模拟器8相对运动信息的视觉图像,根据视觉图像确定目标卫星本体模拟器8的相对于手眼相机3的位置与卫星本体模拟器8的姿态;
步骤三、将步骤二确定的相对位置和姿态传递给空间机械臂2控制器,空间机械臂2控制器通过相对位置和姿态信息确定空间机械臂2末端运动信息;根据空间机械臂2末端运动信息,确定空间机械臂2各关节的运动信息;其中,空间机械臂2各关节的运动信息包括空间机械臂的关节角加速度 和空间机械臂的关节角速度 下角标m为空间机械臂;其中,空间机械臂2末端具体为空间机械臂2与手眼相机3的连接处;空间机械臂包括第一杆件、第二杆件、第三杆件和第四杆件;
步骤四、根据空间机械臂2各关节的运动信息计算服务卫星本体模拟器7基座的运动信息;
步骤五、根据服务卫星本体模拟器7基座的运动信息,通过运动学等效算法计算工业机械臂A9的末端运动信息;其中,工业机械臂A9的末端为工业机械臂A9与服务卫星本体模拟器7的连接处;
步骤六、根据视觉图像确定目标卫星本体模拟器8的相对于手眼相机3的位置的姿态判断接捕获接口6是否在捕获手爪4所在的捕获区域内;若在捕获手爪4所在的捕获区域内则进行步骤八;若不在,则重复步骤一至五;直至捕获接口6在捕获手爪4所在的捕获区域内为止;
步骤七、利用空间机械臂2的控制器控制捕获手爪4捕获目标卫星本体模拟器8;
步骤八、当捕获手爪4捕获目标卫星本体模拟器8后,目标卫星本体模拟器8根据所受的接触力通过动力学算法来估计目标卫星本体模拟器8运动状态;
步骤九、根据步骤八估计的目标卫星本体模拟器8运动状态,通过运动学等效的方法,模拟工业机械臂T10受力后的实际目标卫星的运动状态;
步骤十、根据力矩传感器测量的捕获手爪4与目标卫星本体模拟器8之间接触对基座产生的外力和外力矩通过空间机械臂的动力学算法,计算出服务卫星本体模拟器7的运动状态,通过运动学等效算法利用工业机械臂A9的运动实现服务卫星本体模拟器7的运动状态如图3和图4。其它步骤及参数与具体实施方式一或二相同。
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是:步骤一中模拟目标卫星的运动;如图5利用运动学等效算法将目标卫星本体模拟器8通过工业机械臂T10模拟实际目标卫星运动状态具体过程为:
(1)、将目标卫星本体模拟器8在惯性空间的运动信息转换到工业机械臂T10末端在基座标系下的运动信息;
(2)、通过工业机械臂T10的上位机中的逆运动学算法确定工业机械臂T10的关节运动信息;
(3)、通过工业机械臂T10的内部总线将关节运动信息传递给工业机械臂的关节控制器,关节控制器控制工业机械臂T10运动。其它步骤及参数与具体实施方式一至三之一相同。
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是:步骤三中根据空间机械臂2各关节的运动信息计算服务卫星本体模拟器7基座的运动信息;
如图6空间机械臂2的服务卫星本体模拟器7的运动模拟主要是通过空间机械臂2的动力学算法计算得到服务卫星本体模拟器7的运动状态信息,根据服务卫星本体模拟器7的运动状态信息通过运动学等效算法得到工业机器人A9的运动状态信息;
(1)、根据拉格朗日方程求解得到服务卫星本体模拟器7、空间机械臂2、手眼相机3和捕获手爪4组成系统的动力学方程表示形式如下:
式中,Hb为服务卫星本体模拟器7的惯性张量;Hm为空间机械臂2耦合的惯性张量;Hbm为服务卫星本体模拟器7基座和空间机械臂2耦合的惯性张量; 为服务卫星本体模拟器7基座的运动加速度;cb为与服务卫星本体模拟器7基座运动相关的非线性力,cb包括服务卫星本体模拟器7运动相关的向心力和基座运动相关的哥氏力;cm为空间机械臂2运动相关的非线性力,cm包括空间机械臂2运动相关的向心力和空间机械臂2运动相关的哥氏力;cb、cm∈R6;Fb∈R6为作用于服务卫星本体模拟器7的力和力矩,Fm∈R6为空间机械臂2关节的驱动力矩;Jb为与服务卫星本体模拟器7运动相关的雅可比矩阵;Jm为与空间机械臂2运动相关的雅可比矩阵,当空间机械臂2末端与环境接触,即空间机械臂2末端受到外力和外力矩Fex∈R6;
(2)、根据(1)式推导出下面的公式:
式中, 分别代表服务卫星本体模拟器7基座的运动速度;vb代表服务卫星本体模拟器7基座运动的线速度;ωb分别代表服务卫星本体模拟器7基座运动的角速度。其它步骤及参数与具体实施方式一至四之一相同。
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是:步骤四中根据服务卫星本体模拟器7基座的运动信息,通过运动学等效算法计算工业机械臂A9的末端运动信息具体过程为:
(1)、将服务卫星本体模拟器在惯性空间的运动信息转换到工业机械臂A9末端在基座标系下的运动信息;
(2)、通过工业机械臂A9的上位机中的逆运动学算法确定工业机械臂A9的关节运动信息;
(3)、通过工业机械臂A9的内部总线将关节运动信息传递给工业机械臂的关节控制器,关节控制器控制工业机械臂A9运动。其它步骤及参数与具体实施方式一至五之一相同。
具体实施方式七:本实施方式与具体实施方式一至六之一不同的是:步骤八中当捕获手爪4捕获目标卫星本体模拟器8后,目标卫星本体模拟器8根据所受的接触力通过动力学算法来估计卫星本体模拟器8运动状态的具体过程:
步骤八一、计算目标卫星本体模拟器8对六维力/力矩传感器的重力补偿得到目标卫星本体模拟器8在六维力/力矩传感器坐标系下的重力和重力矩具体公式如下:
式中,Fg代表目标卫星本体模拟器8在重力坐标系下的重力; 代表目标卫星本体模拟器8的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Ps代表目标卫星本体模拟器8重心位置在六维力/力矩传感器坐标系下的位置矢量;Fgs代表目标卫星本体模拟器8在六维力/力矩传感器坐标系下的重力;Tgs分别代表目标卫星本体模拟器8在六维力/力矩传感器坐标系下重力矩;
步骤八二、通过六维力/力矩传感器测量的捕获手爪4与目标卫星本体模拟器8的接触力和接触力矩与目标卫星本体模拟器8在六维力/力矩传感器坐标系下的重力和重力矩差值计算ft和τt,具体公式如下:
ft=Fct-Fgs
τt=Tct-Tgs
其中,Fct代表六维力/力矩传感器测量的捕获手爪4与目标卫星本体模拟器8的接触力;Tct代表六维力/力矩传感器测量的捕获手爪4与目标卫星本体模拟器8的接触力矩;ft代表作用在目标卫星本体模拟器8上的外力;τt代表作用在目标卫星本体模拟器8上的外力矩;
步骤八三、假设目标卫星本体模拟器8是一个单旋转刚体,在不考虑卫星轨道动力学的前提下,那么目标卫星本体模拟器8的动力学方程表示如下:
式中,Mt代表目标卫星本体模拟器8的质量; 代表目标卫星本体模拟器8的线加速度;ωt分别代表目标卫星本体模拟器8的角速度;It分别代表目标卫星本体模拟器8的惯量; 代表目标卫星本体模拟器8的角加速度;
基于忽略轨道动力学的假设,外力矩τt在物理接触之前是零,在接触操作期间是接触力矩。其它步骤及参数与具体实施方式一至六之一相同。
具体实施方式八:本实施方式与具体实施方式一至七之一不同的是:步骤十中根据力矩传感器测量的捕获手爪4与目标卫星本体模拟器8之间接触对基座产生的外力和外力矩通过空间机械臂的动力学算法,计算出服务卫星本体模拟器7的运动状态,通过运动学等效算法利用工业机械臂A9的运动实现服务卫星本体模拟器7的运动状态具体过程:
(1)、如图1为工业机械臂A9末端的空间机械臂对六维力/力矩传感器的重力补偿原理示意图;计算空间机械臂2对六维力/力矩传感器的重力补偿得到空间机械臂2在六维力/力矩传感器坐标系下的重力和重力矩具体公式如下:
式中,G1代表空间机械臂2的第一杆件在重力坐标系下的重力;Fgs1代表空间机械臂2的第一杆件在六维力/力矩传感器坐标系下的重力; 代表空间机械臂2的第一杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs1空间机械臂2代表空间机械臂2的第一杆件在六维力/力矩传感器坐标系下的重力矩;r1代表空间机械臂2的第一杆件重心位置在六维力/力矩传感器坐标系下的位置矢量; 代表空间机械臂2的整体在六维力/力矩传感器坐标系下的重力。
G2代表空间机械臂2的第二杆件在重力坐标系下的重力;Fgs2代表空间机械臂2的第二杆件在六维力/力矩传感器坐标系下的重力; 代表空间机械臂2的第二杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs2代表空间机械臂2的第二杆件在六维力/力矩传感器坐标系下的重力矩;r2代表空间机械臂2的第二杆件重心位置在六维力/力矩传感器坐标系下的位置矢量; 分别代表空间机械臂2的整体在六维力/力矩传感器坐标系下的重力矩。
G3代表空间机械臂2的第三杆件在重力坐标系下的重力;Fgs3代表空间机械臂2的第三杆件在六维力/力矩传感器坐标系下的重力; 代表空间机械臂2的第三杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs3分别代表空间机械臂2的第三杆件在六维力/力矩传感器坐标系下的重力矩;r3代表空间机械臂2的第三杆件重心位置在六维力/力矩传感器坐标系下的位置矢量;
G4分别代表空间机械臂2的第四杆件在重力坐标系下的重力;Fgs4分别代表空间机械臂2的第四杆件在六维力/力矩传感器坐标系下的重力; 分别代表空间机械臂2的第四杆件的重心从六维力/力矩传感器坐标系到重力坐标系的变换矩阵;Tgs4分别代表空间机械臂2的第四杆件在六维力/力矩传感器坐标系下的重力矩;r4分别代表空间机械臂2的第四杆件重心位置在六维力/力矩传感器坐标系下的位置矢量;
(2)、通过六维力/力矩传感器测量的服务卫星本体模拟器7受到的接触力和接触力矩与空间机械臂2在六维力/力矩传感器坐标系下的重力和重力矩差值计算fb和τb,具体公式如下:
fb=Fcb-Fgs
τb=Tcb 一种模拟空间机械臂捕获目标卫星的地面三维空间微重力的装置与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0