






专利摘要
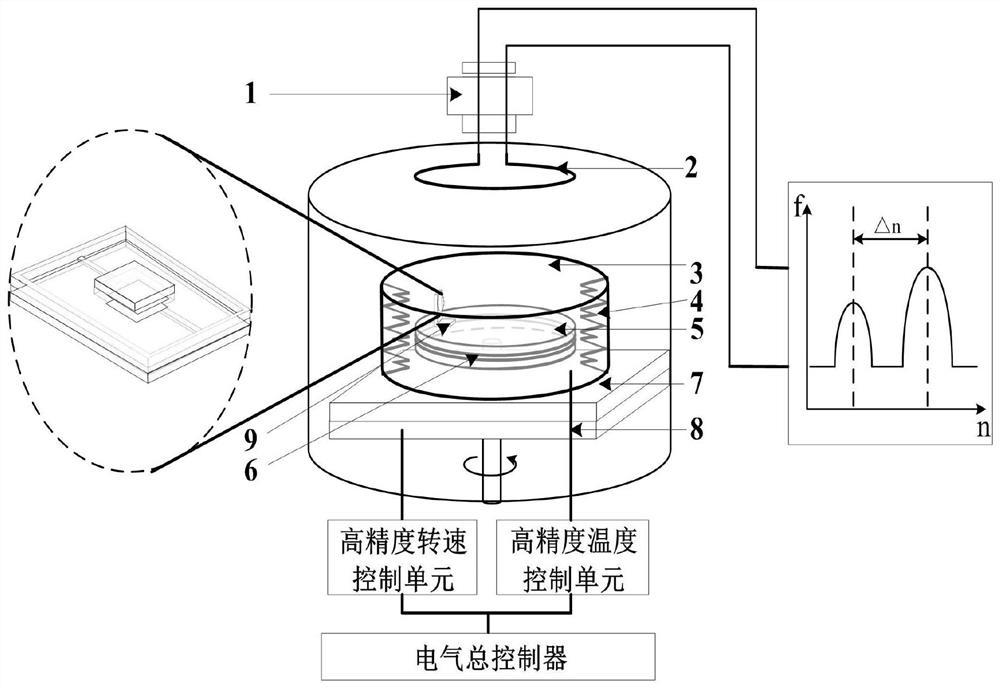
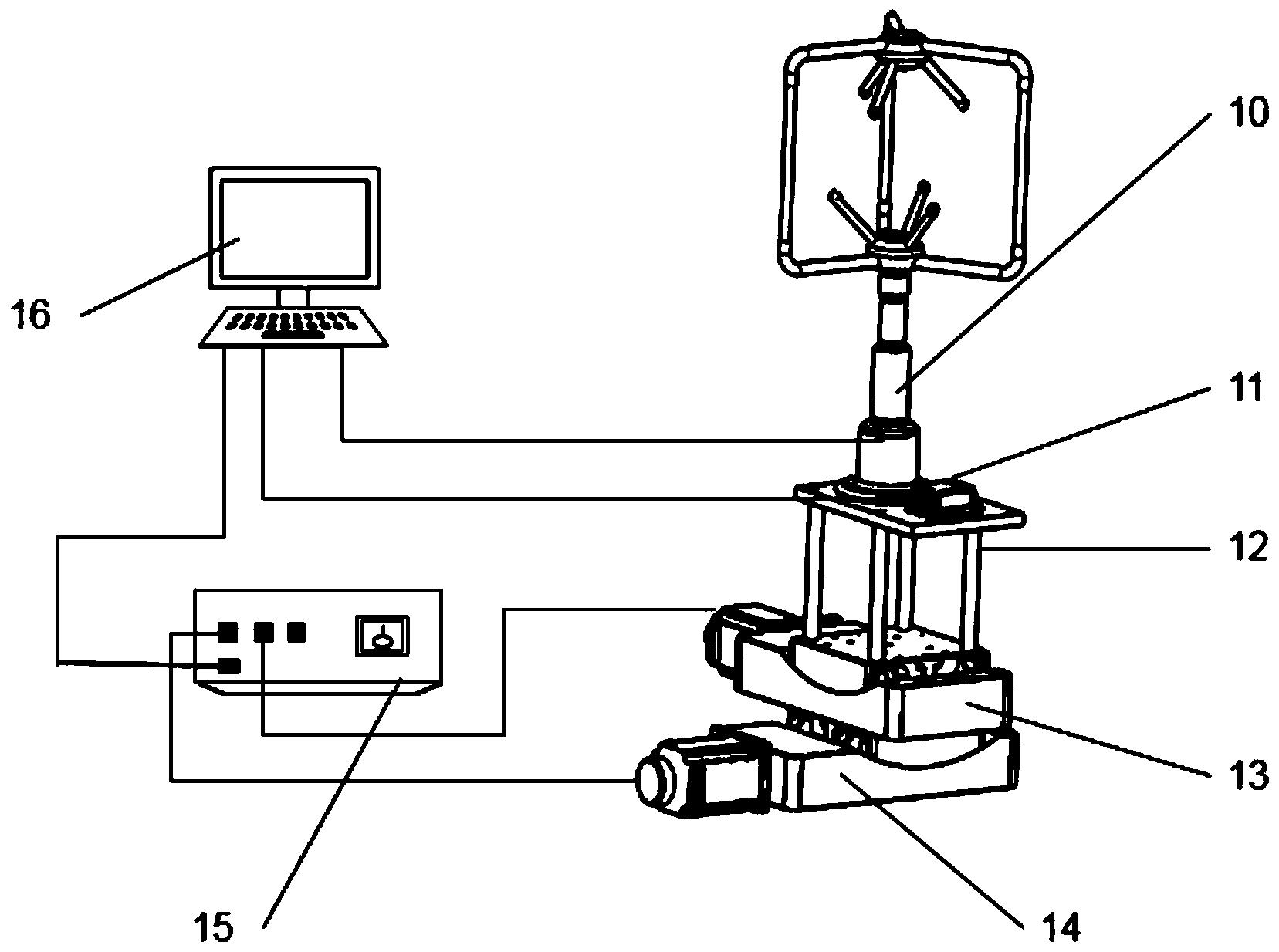
本发明公开一种加速度计在精密离心机上的参数标定方法,包括:获取精密离心机的各静态误差以及动态误差,并根据精密离心机的结构建立坐标系,以及根据所述各静态误差以及动态误差计算所述坐标系下的位姿误差;驱动精密离心机的主轴以匀角速率旋转,以产生向心加速度标定加速度计,基于所述坐标系下的位姿误差计算向心加速度、重力加速度和Coriolis加速度的比力分配,以确定加速度计误差模型;对加速度计在三种不同安装方式下的六个对称位置的指示输出,利用加减消元的方法标定加速度计误差模型表达式中的高阶项误差系数。本发明可有效提高石英加速度计高阶误差模型系数的标定精度。
权利要求
1.一种加速度计在精密离心机上的参数标定方法,其特征在于,包括:
获取精密离心机的各静态误差以及动态误差,并根据精密离心机的结构建立坐标系,以及根据所述各静态误差以及动态误差计算所述坐标系下的位姿误差;
驱动精密离心机的主轴以匀角速率旋转,以产生向心加速度标定加速度计,基于所述坐标系下的位姿误差计算向心加速度、重力加速度和Coriolis加速度的比力分配,以确定加速度计误差模型;
对加速度计在三种不同安装方式下的六个对称位置的指示输出,利用加减消元的方法标定加速度计误差模型表达式中的高阶项误差系数。
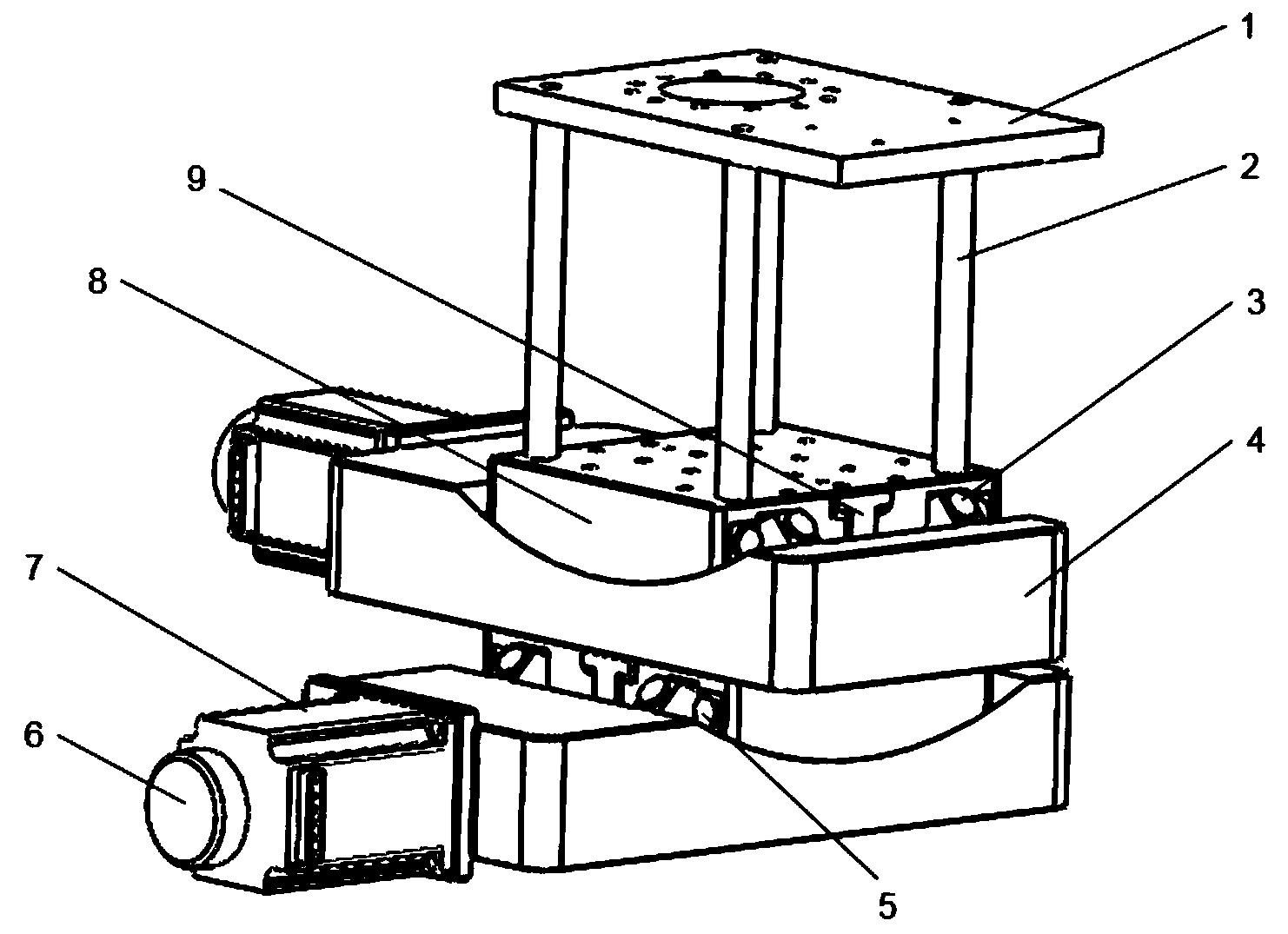
2.根据权利要求1所述的加速度计在精密离心机上的参数标定方法,其特征在于,所述精密离心机包括主轴、水平轴和方位轴;
所述精密离心机的静态误差包括主轴轴线的二维铅垂度误差
所述精密离心机的动态误差包括主轴径向回转误差
半径误差
3.根据权利要求2所述的加速度计在精密离心机上的参数标定方法,其特征在于,所述根据精密离心机的结构建立坐标系,以及根据所述各静态误差以及动态误差计算所述坐标系下的位姿误差包括:
建立地理坐标系
建立主轴轴套坐标系
建立主轴坐标系
建立水平轴轴套坐标系
建立水平轴坐标系
建立方位轴轴套坐标系
建立方位轴坐标系
建立工作基面坐标系
建立加速度计坐标系
4.根据权利要求3所述的加速度计在精密离心机上的参数标定方法,其特征在于,
主轴轴套坐标系相对于地理坐标系的位姿为
主轴坐标系相对于主轴轴套坐标系的位姿为
其中
水平轴轴套坐标系相对于主轴坐标系的位姿为
水平轴坐标系相对于水平轴轴套坐标系的位姿为
其中
方位轴轴套坐标系相对于水平轴坐标系的位姿为
方位轴坐标系相对于方位轴轴套坐标系的位姿为
其中
工作基面坐标系相对于方位轴坐标系的位姿为
其中
加速度计坐标系相对于工作基面坐标系的位姿为
其中
加速度计坐标系相对于地理坐标系的位姿为
其中
加速度计坐标系相对于主轴坐标系的位姿为
其中
加速度计坐标系原点在主轴坐标系下表示为
5.根据权利要求1所述的加速度计在精密离心机上的参数标定方法,其特征在于,所述加速度计误差模型的表达式为:
其中,
所述高阶项误差系数包括所述二阶非线性系数、奇异二次项系数、三阶非线性系数以及交叉耦合系数。
6.根据权利要求5所述的加速度计在精密离心机上的参数标定方法,其特征在于,所述对加速度计在三种不同安装方式下的六个对称位置的指示输出,利用加减消元的方法标定加速度计误差模型表达式中的高阶项误差系数包括:
当加速度计的输出轴始终与离心机的方位轴轴线一致,离心机的水平轴始终处于
12个位置采用统一的结构矩阵如式(17)所示,
根据位置1和位置2上加速度计输入轴、摆轴和输出轴的比力辨识出
根据位置3和位置4上加速度计输入轴、摆轴和输出轴的比力辨识出
根据位置5和位置6上加速度计输入轴、摆轴和输出轴的比力辨识出
根据位置7和位置8上加速度计输入轴、摆轴和输出轴的比力辨识出
根据位置9和位置10上加速度计输入轴、摆轴和输出轴的比力辨识出
根据位置11和位置12上加速度计输入轴、摆轴和输出轴的比力辨识出
加速度计在精密离心机上的参数标定方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0