

IPC分类号 : G09B23/04,G09B25/02,B43L11/00,B43L11/02,B23Q15/013,B23Q1/01







专利摘要
全自动参数方程多函数同步演示绘图切割一体机,包括:三维滑轨、平移机构、驱动器、画笔、切割工具、参量推进器、托板和控制盘。所述三维滑轨包括第一方管、第一直角板架、第一滑块、第四滑块、吸盘和支脚,所述三维滑轨的xy框架、xt框架、yt框架内分别置于一只平移机构,所述xt框架、yt框架内的平移机构上分别置于一只驱动器,所述平移机构内分别置于一支画笔、切割工具,所述参量推进器置于第二方管外侧,所述三维滑轨的xy框架、xt框架、yt框架的外边框上分别置于一只托板,控制盘置于三维滑轨的边框上,本实用新型操作简单,结构紧凑成本低廉安全可靠装置轻巧,功能齐全,适用性强。
权利要求
1.全自动参数方程多函数同步演示绘图切割一体机,其特征在于,包括:三维滑轨、平移机构、驱动器、画笔、切割工具、参量推进器、托板和控制盘,所述三维滑轨包括第一方管、第一直角板架、第一滑块、第四滑块、吸盘和支脚,所述第一方管相邻的两个侧面管壁上分别设有平行于棱的矩形槽沟,所述矩形槽沟间的直棱处设有第一标尺,所述第一方管内设有第一滑块,所述第一滑块相邻的两个侧面中部分别设有矩形凹槽,所述凹槽与第一方管上的矩形槽沟相对,所述第一方管一端有矩形槽沟的一侧设有垂直的第二方管,所述第二方管及其上的矩形槽沟和所述第一标尺都与第一方管相同,所述第二方管内设有第二滑块,所述第一方管和第二方管外端设有第一直角板架,所述第一直角板架是由两块矩形硬板在一端垂直固连而成,所述矩形硬板上沿长边方向设有矩形槽沟,所述每个所述矩形槽沟内各设有一只第四滑块,所述第一直角板架的两个外端分别与第一方管和第二方管外端垂直相连,所述第一方管、第二方管和第一直角板架组成矩形框架,称为xy框架,所述第一方管和第二方管有矩形槽沟一侧的顶角处设有垂直的第三方管,所述第三方管的四个侧面管壁上分别设有平行于棱的矩形槽沟,所述第三方管内设有第三滑块,所述第三方管和第二方管外端设有第二直角板架,所述第三方管和第一方管外端设有第三直角板架,所述第二直角板架和第三直角板架都与第一直角板架相同,所述第一方管、第三方管和第三直角板架组成与xy框架相同的称为yt框架,所述第三方管、第二方管和第二直角板架组成与xy框架相同的称为xt框架,所述xt框架外侧四个角点上分别设有支脚,支脚是设有调节螺栓及吸盘的可拆卸多用支脚,所述第二直角板架和第三直角板架的直角棱上分别设有一只吸盘,
所述三维滑轨的xy框架、xt框架、yt框架内分别置于一只平移机构,所述xt框架、yt框架内的平移机构上分别置于一只驱动器,所述平移机构内分别置于一支画笔、切割工具,所述参量推进器置于第二方管外侧,所述三维滑轨的xy框架、xt框架、yt框架的外边框上分别置于一只托板,控制盘置于三维滑轨的边框上。
2.根据权利要求1所述的全自动参数方程多函数同步演示绘图切割一体机,其特征在于:所述驱动器包括第三矩形板、第四矩形板、第五矩形板、第六矩形板、第一电机和第一齿轮,所述第三矩形板的两端分别设有垂直的第四矩形板和第五矩形板,所述第五矩形板的下边棱上设有垂直的第八滑块,所述第五矩形板的外端设有第五销钉,所述第四矩形板的下边棱上设有垂直的第七滑块,所述第七滑块和第八滑块可以在第五凹槽内滑动,所述第四矩形板内壁上设有第一电机,所述第一电机转轴外端与第五矩形板相连,所述第一电机的转轴上设有第一齿轮,所述第一齿轮的轮齿间设有活动闸板,所述闸板的另一端设有电磁弹簧,所述闸板与电磁弹簧的铁芯相连,所述电磁弹簧固定在第三矩形板的内壁上,所述第四矩形板的外端设有铰链,所述铰链的另一端设有第六矩形板,所述第六矩形板外端设有垂直的第三挡板,所述第三矩形板、第四矩形板、第五矩形板、第六矩形板围成矩形框架。
说明书
技术领域:
本实用新型属于教学工具领域,具体涉及全自动参数方程多函数同步演示绘图切割一体机。
背景技术:
参数方程是曲线方程的一种表示形式,它也是解析几何的重要工具.可以把复杂的方程简单化,它表现问题直观是人们解决复杂问题最常用的一种方法,是中学生必须掌握的数学内容,也是大学生广泛应用的手段,由于在两个变量间增加一个参量,且以方程组形式表现,内中所包含的函数增多为三个,变量间的相互关系无法直观表现,有些函数的参量多置于两个变量形成的直角坐标系中表示如用转角,但参量与变量间的直观性和正交关系模糊且繁杂,对初学者造成极大地混乱,教师讲授时没有合适的教具和真实的情景做引导和启发,学生学习时感到非常吃力,加重了教与学的双重困难。生产企业或从事装饰工作的人员,为加工或雕刻一些至少有两个平面组成的棱线棱角等形状的对象,所用工具是单一曲线或固定参数的专用机械或在固定位置加工,都必须经过多次反复的装卸对位等工序才能完成,精度低效率不高劳动强度大。
为了解决上述问题,近阶段也出现了少数的关于圆锥曲线方面的装置,如,申请号为“201811083733.0”的文献中给出了“基于椭圆参数方程的叶片进排气边变余量控制精密铣削方法”,用于解决现有叶片进排气边加工方法精度差的技术问题。此方案通过三维建模软件、构造新刀具并对其进行均匀参数化、确定加工路径、选取加工余量、计算刀具轨迹等措施,提高加工精度。没有同时表现多个函数关系并把函数图象同时绘制出,也没有在三个垂直面上同时加工多条槽沟等功能。
专利申请号为201610164992.0的文献中给出了“圆锥曲线规”,包括主立杆、平芯杆、斜芯杆、立撑杆、滑转杆、画杆及平撑杆等多根连杆,连杆之间通过滑套、转套、铰链连接,所述滑套、转套上设置紧定部件,并在此基础上设置锁紧部件、辅助杆、加长杆及可拆卸画笔等以进行结构优化。可以绘制椭圆、抛物线和双曲线等圆锥曲线;绘制的曲线效率高、精度高。此装置只能用于绘制圆锥曲线不能同时绘制参数方程中的多函数联动异面曲线,尤其不能用于一次性切割雕刻棱线棱角方面的加工对象,参数调节范围小,所述工程技术和工农业生产中技术精度不足。
实用新型内容:
为解决上述技术问题,本实用新型全自动参数方程多函数同步演示绘图切割一体机,包括:1.全自动参数方程多函数同步演示绘图切割一体机,其特征在于,包括:三维滑轨、平移机构、驱动器、画笔、切割工具、参量推进器、托板和控制盘。所述三维滑轨包括第一方管、第一直角板架、第一滑块、第四滑块、吸盘和支脚,所述第一方管相邻的两个侧面管壁上分别设有平行于棱的矩形槽沟,所述矩形槽沟间的直棱处设有第一标尺,所述第一方管内设有第一滑块,所述第一滑块相邻的两个侧面中部分别设有矩形凹槽,所述凹槽与第一方管上的矩形槽沟相对,所述第一方管一端有矩形槽沟的一侧设有垂直的第二方管,所述第二方管及其上的矩形槽沟和所述第一标尺都与第一方管相同,所述第二方管内设有第二滑块,所述第一方管和第二方管外端设有第一直角板架,所述第一直角板架是由两块矩形硬板在一端垂直固连而成,所述矩形硬板上沿长边方向设有矩形槽沟,所述每个所述矩形槽沟内各设有一只第四滑块,所述第一直角板架的两个外端分别与第一方管和第二方管外端垂直相连,所述第一方管、第二方管和第一直角板架组成矩形框架,称为xy框架,所述第一方管和第二方管有矩形槽沟一侧的顶角处设有垂直的第三方管,所述第三方管的四个侧面管壁上分别设有平行于棱的矩形槽沟,所述第三方管内设有第三滑块,所述第三方管和第二方管外端设有第二直角板架,所述第三方管和第一方管外端设有第三直角板架,所述第二直角板架和第三直角板架都与第一直角板架相同,所述第一方管、第三方管和第三直角板架组成与xy框架相同的称为yt框架,所述第三方管、第二方管12和第二直角板架组成与xy框架相同的称为xt框架,所述xt框架外侧四个角点上分别设有支脚,支脚是设有调节螺栓及吸盘的可拆卸多用支脚,所述第二直角板架15 和第三直角板架的直角棱上分别设有一只吸盘,
所述三维滑轨的xy框架、xt框架、yt框架内分别置于一只平移机构,所述 xt框架、yt框架内的平移机构上分别置于一只驱动器,所述平移机构内分别置于一支画笔、切割工具,所述参量推进器置于第二方管外侧,所述三维滑轨的 xy框架、xt框架、yt框架的外边框上分别置于一只托板,控制盘置于三维滑轨的边框上。
进一步技术方案,所述驱动器包括第三矩形板、第四矩形板、第五矩形板、第六矩形板、第一电机和第一齿轮,所述第三矩形板的两端分别设有垂直的第四矩形板和第五矩形板,所述第五矩形板的下边棱上设有垂直的第八滑块,所述第五矩形板的外端设有第五销钉,所述第四矩形板的下边棱上设有垂直的第七滑块,所述第七滑块和第八滑块可以在第五凹槽内滑动,所述第四矩形板内壁上设有第一电机,所述第一电机转轴外端与第五矩形板相连,所述第一电机的转轴上设有第一齿轮,所述第一齿轮的轮齿间设有活动闸板,所述闸板的另一端设有设有电磁弹簧,所述闸板与电磁弹簧的铁芯相连,所述电磁弹簧固定在第三矩形板的内壁上,所述第四矩形板的外端设有铰链,所述铰链的另一端设有第六矩形板,所述第六矩形板外端设有垂直的第三挡板,所述第三矩形板、第四矩形板、第五矩形板、第六矩形板围成矩形框架。
与现有技术相比,本实用新型的有益效果:
1.操作简单,结构紧凑成本低廉安全可靠装置轻巧。
2.本实用新型的全自动参数方程多函数同步演示绘图切割一体机,功能齐全:能完成可控数值范围内的任意参数方程所表现多函数的同步演示绘图切割,一次性完成内外直角面的同时加工;适用性强:能在多种场合演示绘图或加工。
附图说明:
附图用来提供对本实用新型进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,所述附图中:
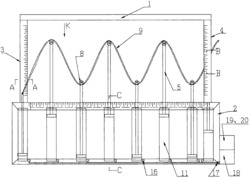
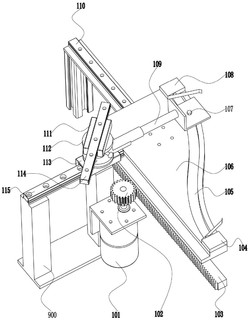
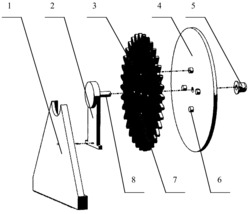
图1为本实用新型的整体结构示意图
图2为本实用新型的整体结构示意图
图3为本实用新型的整体结构示意图
图4为本实用新型的整体结构示意图
图5为本实用新型的整体结构示意图
图6为本实用新型的整体结构示意图
图7为本实用新型的整体结构示意图
图8为本实用新型的整体结构示意图
图9为本实用新型的整体结构示意图
其中:1-三维滑轨、2-平移机构、3-驱动器、4-画笔、5-切割工具、6-参量推进器、7-托板、8-控制盘、11-第一方管、12-第二方管、13-第三方管、14- 第一直角板架、15-第二直角板架、16-第三直角板架、17-第一滑块、18-第二滑块、19-第三滑块、110-第四滑块、111-吸盘、112-支脚、113-第一标尺、21- 方管枢纽、22-横向框架、23-纵向框架、211-第四方管、212-第五滑块、213- 第六滑块、214-第一矩形板、215-第一销钉、216-第二销钉、217-第二矩形板、 221-第一U形框、222-第一挡板、223-第一凹槽、224-第一插杆、225-第二凹槽、226-第二插杆、227-第三销钉、231-第二U形框、232-第二挡板、233-第三凹槽、 234-第三插杆、235-第四凹槽、236-第四插杆、237-第四销钉、238-第五凹槽、 239-直齿条、2310-贴标、31-第三矩形板、32-第四矩形板、33-第五矩形板、34- 第六矩形板、35-第一电机、36-第一齿轮、37-电磁弹簧、38-闸板、39-铰链、 310-第七滑块、311-第八滑块、312-第三挡板、313-第五销钉、41-第五方管、 42-第一方板、43-第二方板、44-第一圆管、45-指示灯、46-第一弹簧、47-第一圆环盘、48-圆笔杆、49-圆锥笔尖、410-第六销钉、51-第六方管、52-第一圆盘、53-第二弹簧、54-第二圆盘、55-第一方杆、56-切刀、57-第一方孔、58-第七销钉、61-圆轴杆、62-第六矩形板、63-第一螺母、64-第七矩形板、65-第二电机、 66-第二圆环盘、67-第一圆轴孔、68-第四直角板架、69-第三圆环盘、610-第五插杆、611-第五直角板架、612-第二圆轴孔、613-手动摇把、71-第八矩形板、72- 第一撑杆、73-第二螺母、74-第三螺母、75-夹具、81-第九矩形板、82-第一控制器、83-第二控制器、84-第三控制器、85-电源开关、821-第三U形框、822- 矩形孔、823-第十矩形板、824-电机控制键、825-第四挡板、826-电磁弹簧开关、827-第三弹簧、828-第二撑杆。
具体实施方式:
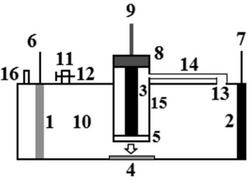
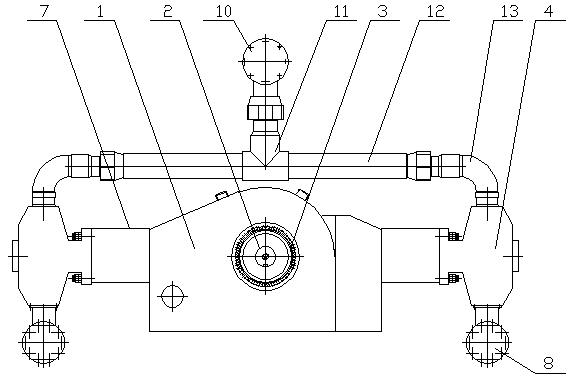
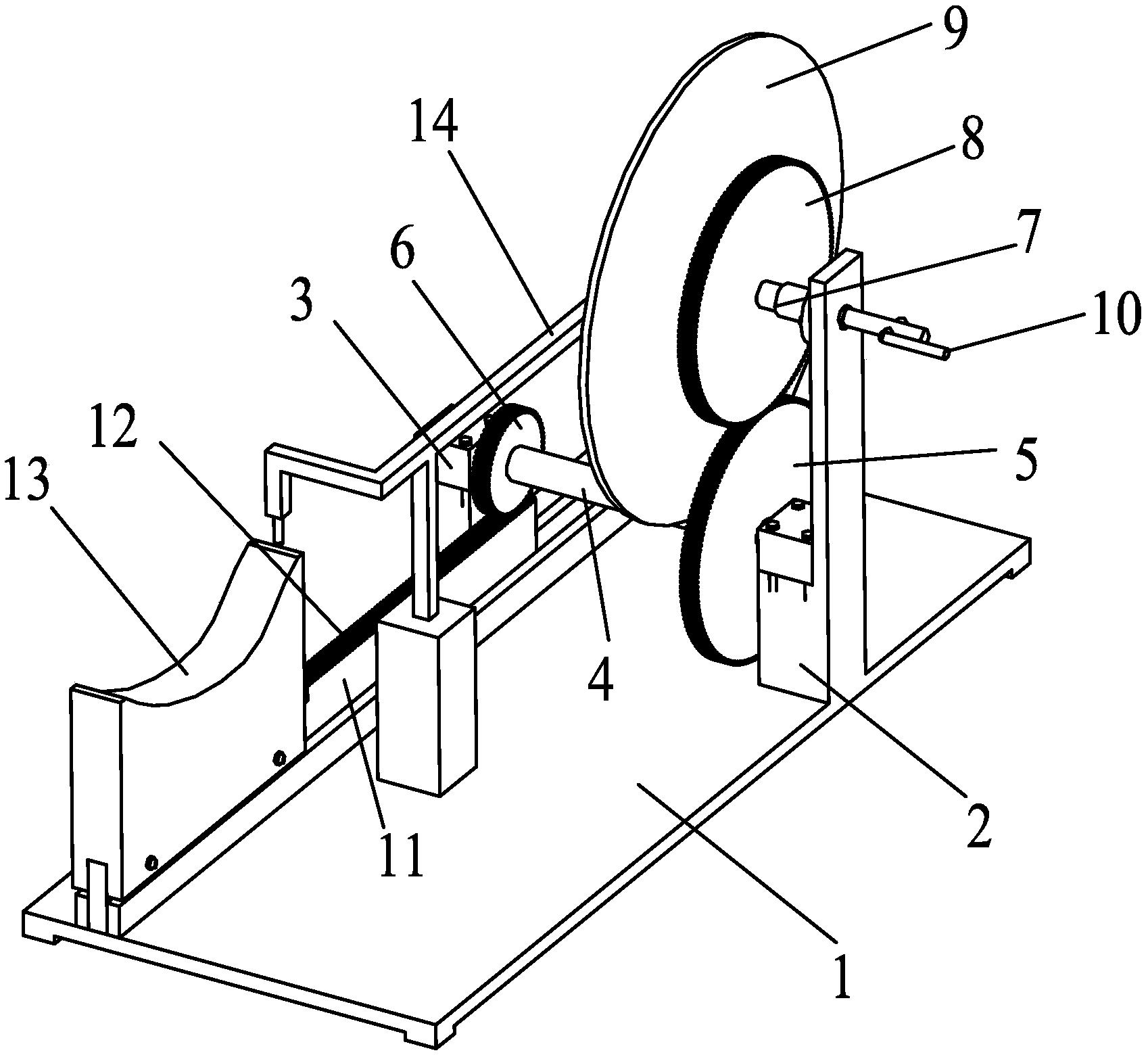
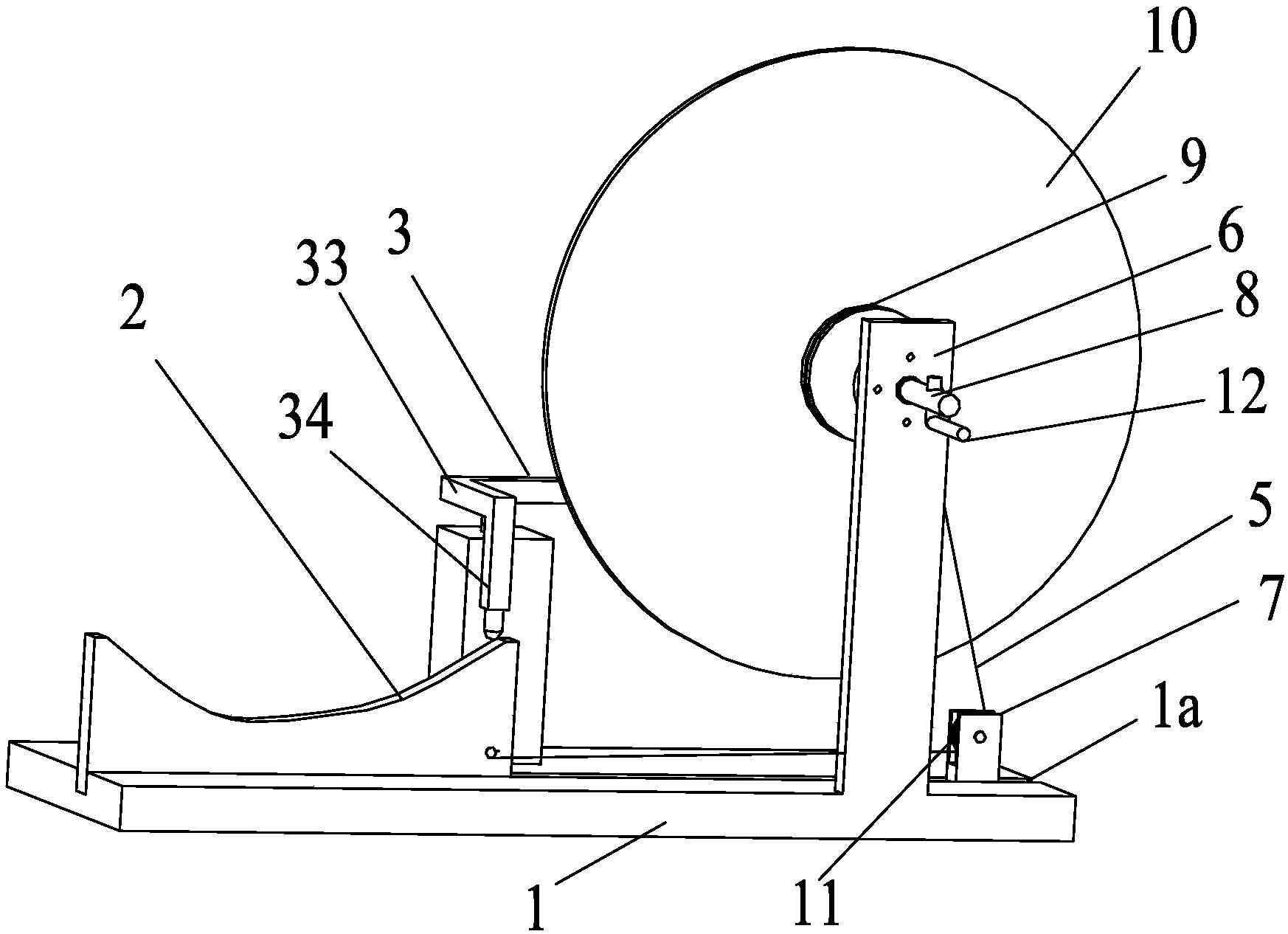
如图所示,全自动参数方程多函数同步演示绘图切割一体机,包括:三维滑轨1、平移机构2、驱动器3、画笔4、切割工具5、参量推进器6、托板7和控制盘8。所述三维滑轨1是确定三个函数曲线相对位置并为其它运动体提供支撑的装置,包括第一方管11、第一直角板架14、第一滑块17、第四滑块110、吸盘111和支脚112,所述第一方管11是内壁光滑截面为正方形的硬直管,所述第一方管11相邻的两个侧面管壁上分别设有平行于棱的矩形槽沟,所述矩形槽沟间的直棱处设有第一标尺113,所述第一方管11内设有第一滑块17,所述第一滑块17是外表光滑的长方体硬块,所述第一滑块17相邻的两个侧面中部分别设有矩形凹槽,所述凹槽与第一方管11上的矩形槽沟相对,所述第一滑块17在第一方管11内能沿管壁平稳运动,所述第一方管11一端有矩形槽沟的一侧设有垂直的第二方管12,所述第二方管12及其上的矩形槽沟和所述第一标尺113都与第一方管11相同,它们的矩形槽沟分别在同侧及内测,所述第二方管12内设有第二滑块18,所述第二滑块18与第一滑块17相同,放置方式也相同,所述第一方管11和第二方管12外端设有第一直角板架14,所述第一直角板架14是由两块矩形硬板在一端垂直固连而成,每块矩形硬板上沿长边方向设有矩形槽沟,所述每个所述矩形槽沟内各设有一只第四滑块110,所述第一直角板架14的两个外端分别与第一方管11和第二方管12外端垂直相连,所述第一方管11、第二方管12和第一直角板架14组成矩形框架,称为xy框架,xy框架上的四条矩形槽沟围成正方形,所述第一方管11和第二方管12有矩形槽沟一侧的顶角处设有垂直的第三方管13,所述第三方管13的四个侧面管壁上分别设有平行于棱的矩形槽沟,其上的第一标尺113与第一方管11相同,所述第三方管13内设有第三滑块19,所述第三滑块19的形状及放置方式都与第一滑块17相同,只是外表颜色比其他的要明显不同或在其上固定一只指示灯,所述第三方管13和第二方管12外端设有第二直角板架15,所述第三方管13和第一方管11外端设有第三直角板架16,所述第二直角板架15和第三直角板架16都与第一直角板架14 相同,所述第一方管11、第三方管13和第三直角板架16组成与xy框架相同的称为yt框架,所述第三方管13、第二方管12和第二直角板架15组成与xy框架相同的称为xt框架,所述xt框架外侧四个角点上分别设有支脚112,支脚112 是设有调节螺栓及吸盘111的可拆卸多用支脚112,所述第二直角板架15和第三直角板架16的直角棱上分别设有一只吸盘111,吸盘111可拆卸或调向使用。
所述三维滑轨1的xy框架、xt框架、yt框架内分别置于一只平移机构2,所述xt框架、yt框架内的平移机构2上分别置于一只驱动器3,所述每只平移机构2内置于一支画笔4或切割工具5,参量推进器6置于第二方管12外侧,所述三维滑轨1的xy框架、xt框架、yt框架的外边框上分别置于一只托板7,控制盘8置于三维滑轨1的边框上。
所述xy框架与所属的平移机构2、画笔4构成独立的平面绘图器一,所述 xt框架与其内部所属构成绘图器二,所述yt框架与其内部所属构成绘图器三,所述三支画笔4在三维滑轨1内各滑块、平移机构2及驱动器3作用下形成联动,能同时绘制成有关联的三条曲线。将三个切割工具5同时替换三支画笔4则绘图器一、二、三分别成为切割机一、二、三,能按照不同规律在三个方位同时切割三件工件。
所述平移机构2是实现平面上直角坐标点能任意移动的装置,包括方管枢纽 21、横向框架22和纵向框架23,所述方管枢纽21是由第四方管211和第一矩形板214,所述第四方管211是外截面为正方形的硬直管,所述第四方管211两个平行的外侧面上分别对称设有固定的长条形第五滑块212,所述第五滑块212 位置相同且都垂直于直角棱,所述第四方管211另两个平行的外侧面上对称设有固定的长条形第六滑块213,所述第六滑块213位置相同且都垂直于直角棱,所述第五滑块212和第六滑块213之间设有第一矩形板214,所述第一矩形板214 中部开有矩形槽沟套在第四方管211外,所述第一矩形板214上分别设有第二销钉216和第二矩形板217,所述第二销钉216位于矩形槽沟边缘,所述第二矩形板217垂直固定在第一矩形板214上与第五滑块212同向的一端,所述第四方管 211两端侧面上分别设有第一销钉215,所述第五滑块212上设有横向框架22,所述横向框架22是由第一U形框221和第一挡板222组成的矩形框架,所述第一U形框221是由三根方形硬杆连接成的长条形开口框架,所述两根平行的长硬杆内侧分别设有第一凹槽223,所述两个长硬杆外端分别设有第二凹槽225和第三销钉227,所述第一U形框221的开口处设有第一挡板222,所述第一挡板222与第一U形框221短硬杆相同,所述第一挡板222两端中部分别设有固定的第一插杆224,将两个第一插杆224分别插入第二凹槽225并用第三销钉227垂直固定,所述第一U形框221和第一挡板222组成闭合内滑框,所述第五滑块 212以第一凹槽223为外滑轨进行自由滑动,所述横向框架22的两端分别设有第二插杆226,所述第六滑块213上设有纵向框架23,纵向框架23包括第二U 形框231、第二挡板232、第三凹槽233、第三插杆234、第四凹槽235、第四插杆236和第四销钉237,其结构与横向框架22完全相同,所述纵向框架23长硬杆的两个外侧面上分别设有第五凹槽238,所述纵向框架23两长硬杆与第一矩形板214同向的侧面上分别设有固定的直齿条239和贴标2310。所述方管枢纽 21、横向框架22和纵向框架23组成正交运动系统,所述固定横向框架22、纵向框架23中之一,所述方管枢纽21随另一个平行移动,其上任意点轨迹为直线,所述横向框架22、纵向框架23分别各自平行移动,所述方管枢纽21上任意点轨迹为曲线。
所述平移机构2有三只,置于yt框架内的一只是将第二插杆226和第四插杆236依次分别连接在第一滑块17、第三滑块19上,直齿条239与第一方管11 平行,由yt框架及平移机构2构成的正交枢纽装置称为yt枢纽,置于xt框架内的一只是将第二插杆226和第四插杆236依次分别连接在第二滑块18、第三滑块19上,直齿条239与第二方管12平行,它们形成的装置称为xt枢纽,同样,置于xt框架内的一只是将第二插杆226和第四插杆236依次分别连接在第一滑块17、第三滑块19上,xy框架为xy枢纽。
所述驱动器3是带动平移机构2上方管枢纽21及纵向框架23运动地装置,包括第三矩形板31、第四矩形板32、第五矩形板33、第六矩形板34、第一电机 35和第一齿轮36,所述第三矩形板31的两端分别设有垂直的第四矩形板32和第五矩形板33,所述第四矩形板32和第五矩形板33相同且相对,所述第四矩形板32高度比第三矩形板31高,所述第五矩形板33的下边棱上设有垂直的第八滑块311,所述第五矩形板33的外端设有第五销钉313,所述第四矩形板32 的下边棱上设有垂直的第七滑块310,所述第七滑块310和第八滑块311相同都是长条形并可以在第五凹槽238内滑动,所述第四矩形板32内壁上设有第一电机35,所述第一电机35是伺服电机其转轴外端与第五矩形板33相连,所述第一电机35的转轴上设有第一齿轮36,所述第一齿轮36的轮齿间设有活动闸板 38,所述闸板38是楔形硬板,所述闸板38的另一端设有电磁弹簧37,所述闸板38与电磁弹簧37的铁芯相连,所述电磁弹簧37固定在第三矩形板31 的内壁上,所述电磁弹簧37通电时铁芯伸出,所述第一齿轮36被闸板38锁住,停电时电磁弹簧37的铁芯及闸板38缩回,所述第一齿轮36可以自由转动,所述第四矩形板32的外端设有铰链38,所述铰链38的另一端设有第六矩形板34,所述第六矩形板34与第三矩形板31相同,所述第六矩形板34外端设有垂直的第三挡板312,转动第六矩形板34使第三挡板312与第五矩形板33重叠,用第五销钉313锁住,所述第三矩形板31、第四矩形板32、第五矩形板33、第六矩形板34构成矩形框架。
所述驱动器3是将第三矩形板31固定在平移机构2的第二矩形板217上,所述第一齿轮36与直齿条239啮合,所述第七滑块310和第八滑块311分别插入纵向框架23的第五凹槽238内并可以自由滑动。
所述驱动器3和平移机构2组件的工作原理:当第一电机35通电电磁弹簧 37停电时,闸板38缩回,所述第一齿轮36转动带动方管枢纽21及其横向框架 22沿纵向框架23平行移动,当第一电机35停电而电磁弹簧37通电时,所述闸板38伸出,所述第一齿轮36停止转动并被锁定,所述方管枢纽21及其横向框架22停止不动。
所述画笔4是用于绘制图像的工具,包括第五方管41、第一圆管44、指示灯45、第一弹簧46、圆笔杆48和圆锥笔尖49,所述第五方管41是透明硬管,所述第五方管41的两端分别设有固定的第一方板42和第二方板43,所述第一方板42和第二方板43间设有第一圆管44,所述第一圆管44的两端伸出第一方板42和第二方板43外,所述第一圆管44第二方板43所在的一端管内设有指示灯45,所述第一方板42外侧设有固定的第一弹簧46,所述第一弹簧46是套在第一圆管44外的螺旋式,所述第一弹簧46的外端设有固定的第一圆环盘47,所述第一弹簧46套在第一圆环盘47的内圆孔外,所述第一圆环盘47的内圆孔内设有固定的圆笔杆48,所述圆笔杆48的里端插入第一圆管44内且能自由抽插,所述圆笔杆48的外端设有圆锥笔尖49,所述圆锥笔尖49和指示灯45都在第五方管41的中心线上,所述第五方管41和第一圆管44上设有第六销钉410,用于固定圆笔杆48。
所述画笔4是将第五方管41插入平移机构2的第四方管211内,用第一销钉215固定。
所述切割工具5是用于切割槽沟或雕刻图案的工具,包括第六方管51、第二弹簧53、第一方杆55和切刀56,所述第六方管51的一端设有固定的第一圆盘52,所述第一圆盘52中部第六方管51内设有第一方孔57,所述第一圆盘52 外侧设有固定的第二弹簧53,所述第二弹簧53是套在第一方孔57外,所述第一方孔57内设有能自由抽插的第一方杆55,所述第一方杆55上设有固定的第二圆盘54,所述第二弹簧53的外端固定在第二圆盘54上,所述第一方杆55外端设有切刀56,所述第六方管51上设有第七销钉58,用于固定第一方杆55。
所述切割工具5是将第六方管51插入平移机构2的第四方管211内,用第一销钉215固定。
所述参量推进器6是用于推进或拉动滑块的机构,包括圆轴杆61、第六矩形板62、第一螺母63、第七矩形板64、第二电机65和手动摇把613,所述圆轴杆61是两端外壁光滑中部设有螺纹的圆直杆,所述圆轴杆61一端设有手动摇把 613,所述手动摇把613是可拆卸的,所述圆轴杆61上依次分别设有第二圆环盘66、第六矩形板62、第三圆环盘69、第一螺母63、第七矩形板64、第二电机 65,所述第六矩形板62和第七矩形板64都是硬直板,所述第六矩形板62和第七矩形板64的中部分别设有第一圆轴孔67和第二圆轴孔612,所述第六矩形板 62和第七矩形板64分别套在圆轴杆61的两端外面并能自由转动,所述第二圆环盘66和第三圆环盘69的内圆孔固定在圆轴杆61上并分别处于第六矩形板62 的两侧起到固定位置的作用,所述第一螺母63套在螺纹上,所述第一螺母63 上设有第五插杆610,所述第二电机65是伺服电机固定在第七矩形板64外侧,所述第二电机65的转轴与圆轴杆61的另一端相直连,所述第六矩形板62和第七矩形板64上依次分别设有第四直角板架68和第五直角板架611。
所述参量推进器6是将第四直角板架68和第五直角板架611分别固定在第三方管13的两端外侧,所述第五插杆610与第三滑块19相固连。启动第二电机 65或摇转手动摇把613都能使第三滑块19在第三方管13内滑动。
所述托板7是用于画图或切割的托板,包括第八矩形板71、第一撑杆72、第二螺母73、第三螺母74和夹具75,所述第八矩形板71是硬平直板,所述第八矩形板71的四个角上开设有圆孔,所述第八矩形板71的圆孔中设有第一撑杆 72,所述第一撑杆72是圆硬杆,所述第一撑杆72一端设有螺纹,所述第一撑杆 72的螺纹上分部设有第二螺母73和第三螺母74,所述第二螺母73和第三螺母 74分别在第八矩形板71的两侧,用于调整位置,所述第八矩形板71的内侧面上设有多个夹具75。
所述托板7有三个,分别将第一撑杆72的外端垂直固定在xy框架、xt框架、 yt框架的外侧,所述第八矩形板71内侧面分别与框架平面平行。
所述控制盘8是控制电机运动的装置,包括第九矩形板81、第一控制器82、第二控制器83和第三控制器84,所述第九矩形板81是硬绝缘板,所述第九矩形板81上依次分别设有电源开关85、第一控制器82、第二控制器83和第三控制器84,所述第一控制器82是控制xt框架内驱动器3上的第一电机35和电磁弹簧37,包括第三U形框821、第十矩形板823、电机控制键824、第四挡板825、电磁弹簧开关826、第三弹簧827和第二撑杆828,所述第三U形框821开口端的两个平行板上分别设有矩形孔822,所述第三U形框821的内底面上分别设有固定的电磁弹簧开关826和第三弹簧827,所述电磁弹簧开关826是两根平行的金属弹簧片,所述弹簧片分别与电磁弹簧37的电源线相接,所述两根弹簧片的外端各有一个触头,自然状态下两个触头相连电路导通,所述螺旋式弹簧的第三弹簧827套在电磁弹簧开关826外,所述第三弹簧827的另一端设有固定的第十矩形板823,所述第十矩形板823两端分别设有第四挡板825,两根第四挡板825 的外端分别插入矩形孔822内,所述第十矩形板823的内侧面上第三弹簧827 的里面设有固定的第二撑杆828,所述第二撑杆828的外端是楔形绝缘体,所述第十矩形板823受到一定压力时,所述第二撑杆828的外端能插入电磁弹簧开关 826的两根金属弹簧片内,电磁弹簧37的电路断开,所述第十矩形板823的外侧面上设有电机控制键824,电机控制键824与第一电机35的电源线相连,所述电机控制键824上设有按压式速度控制键,速度控制键分为正向运行与反向运行,速度控制键的初始压力大于第三弹簧827的弹力,且压力与第一电机35速率成正比,所述第三控制器84与第一控制器82功能及结构相同,是控制yt框架内驱动器3上的第一电机35和电磁弹簧37,所述第二控制器83是控制参量推进器6中的第二电机65,所述第二控制器83的外部结构与第一控制器82一样,只含有第三U形框821、矩形孔822、第十矩形板823、电机控制键824、第四挡板825,电机控制键824与第二电机65相接。
所述第一控制器82的工作原理是,接通电源前,所述第十矩形板823在最高位,电磁弹簧开关826是导通的,接通电源,所述电磁弹簧37工作并将第一电机35固定住,用力按压电机控制键824至第十矩形板823在最低位,所述电磁弹簧开关826断开,电磁弹簧37缩回第一电机35通电并转动,继续加大压力第一电机35速率增大,停止按压电机控制键824第十矩形板823回到最高位,所述电磁弹簧37又将第一电机35固定。
所述控制盘8是将第九矩形板81固定在三维滑轨1的框架上。
工作原理:本实用新型的全自动参数方程多函数同步演示绘图切割一体机的工作原理是,利用同轴异面结构中三个正交方向滑动的滑块及垂直方向上两个齿轮齿条组形成的共生性,构造三个相互独立又相互依赖的平面运动系统,实现两个显函数共同表达一个隐函数使其成为显函数。其特点是:操作简单,只要开启控制键或摇转手柄就能完成全部工作。功能齐全:能完成可控数值范围内的任意参数方程所表现多函数的同步演示绘图切割,一次性完成内外直角面的加工;结构紧凑成本低廉携带方便,精度高省时省力;适用性强:能在多种场合演示绘图或加工。适用于教学、工程设计、雕刻、机械加工、打印、内外墙面处理等。
7.1具有演示参数方程中三函数关系并同时分别绘制出图像的功能,操作步骤是:
一、机器组装,1]将三维滑轨1的支脚112置于稳定的平面上,卸掉吸盘111,调节旋钮使三维滑轨1上的xy框架、xt框架、yt框架相互垂直。2]取三个平移机构2分别置于三维滑轨1的xy框架、xt框架、yt框架内。3]取两个驱动器3 分别置于xt框架、yt框架内的平移机构2上。4]将参量推进器6置于第二方管 12上且与第三滑块19相连。5]将控制盘8置于三维滑轨1的边框上并连接好导线。6]取三个托板7分别置于xy框架、xt框架、yt框架外侧,调整第八矩形板 71内侧面分别与框架平面平行。7]取三支画笔4,其中指示灯45的颜色分别定为红色、黄色和蓝色,其上的圆锥笔尖49的颜色也依次分别定为红色、黄色和蓝色,把它们分别记为红色画笔4、黄色画笔4和蓝色画笔4,将红色画笔4、黄色画笔4和蓝色画笔4依次分别置于xy框架、xt框架、yt框架内的平移机构 2上,圆锥笔尖49朝向外方并缩进用第六销钉410固定,关闭所有指示灯45。
二、符号设置:设参数方程为:x=φ(t),y=ψ(t),参量t∈[α,β],变量x和y 间的隐函数为y=f(x),自变量x∈[a,b],因变量y∈[c,d],函数x=φ(t)、y=ψ(t)、 y=f(x)的图像所在平面直角坐标系分别是Oxt、Oyt、Oxy,全自动参数方程多函数同步演示绘图切割一体机用字母W表示。1]在W中由xy框架及内部的平移机构2、红色画笔4和外侧的托板7构成独立的装置记为xy绘图仪,用于构造坐标系Oxy,其中,第一方管11和第二方管12的中心线分别与Oxy中Ox轴和 Oy轴平行,第一滑块17和第二滑块18的中心点位置分别表示变量x和y的取值,红色画笔4与所在的方管枢纽21的中心线重合,其上各点的位置表示Oxy 中动点M的坐标(x,y)。2]W中由xt框架及内部的平移机构2、驱动器3、黄色画笔4和外侧的托板7构成独立的装置记为xt绘图仪,用于构造坐标系Oxt,其中,第二方管12和第三方管13的中心线分别与Oxt中Ox轴和Ot轴平行,第二滑块18和第三滑块19的中心点位置分别表示变量x和参量t的取值,黄色画笔4与所在的方管枢纽21的中心线重合,其上各点的位置表示Oxt中动点P的坐标(t,x)。3]W中由yt框架及内部的平移机构2、驱动器3、蓝色画笔4和外侧的托板7构成独立的装置记为yt绘图仪,用于构造坐标系Oyt,其中,第三方管13和第一方管11的中心线分别与Oyt中Oy轴和Ot轴平行,第一滑块17和第三滑块19的中心点位置分别表示变量y和参量t的取值,蓝色画笔4与所在的方管枢纽21的中心线重合,其上各点的位置表示Oyt中动点Q的坐标(t,y)。4]W中所有平移机构2上贴标2310都表示所在坐标系中横轴的位置。5]W中第一滑块17、第二滑块18和第三滑块19向外滑动为增加,反之,向内滑动为减少。
三、初始位置调整:1]接通控制盘8的电源,打开电源开关85。2]取三张纸分别记为R1、R2、R3,中心点O。3]在纸张R1上画坐标系O1xy及初始点M0(a, c),在R2上画坐标系O2xt及初始点P0(α,a),在R3上画坐标系O1yt及初始点Q0(α,c)。4]分别将纸张R1、R2、R3置于三个托板7上,使各个坐标轴与 W中第一标尺113平行并同向,P0(α,a)和Q0(α,c)在第三方管13上的投影点为同一点T0,M0(a,c)和Q0(α,c)在第一方管11上的投影点为同一点Y0, M0(a,c)和P0(α,a)在第二方管12上的投影点为同一点X0。5]用第二控制器 83或手动摇把613调整第三滑块19位于点T0处,用第三控制器84调整蓝色画笔4对准点Q0后固定,第一滑块17位于点Y0处,用第一控制器82调整黄色画笔4对准点P0后固定,第二滑块18位于点X0处,红色画笔4对准M0。6] 将绘图仪xy上的贴标2310调至与纸张R1上的x轴位置相同,绘图仪xt上的贴标2310调至与纸张R2上的t轴位置相同,绘图仪yt上的贴标2310调至与纸张 R3上的t轴位置相同。
四、多函数演示:1]确定演示内容:对于参量t变化,引起变量x、y分别按照关系x=φ(t),y=ψ(t)变化,继而形成函数y=f(x),2]具体操作过程为:打开所有指示灯,用第二控制器83锁定第三滑块19匀速运行,第三滑块19上的指示灯移动表示参量t在变化,同时分别按压第一控制器82和第三控制器84上运行键,黄色指示灯45和蓝色指示灯45分别在绘图仪xt和yt内各自移动,表示它们分别与参量t建立关系φ、ψ,形成两个函数x=φ(t),y=ψ(t),第二滑块18和第三滑块19各自在滑道内活动,分别表示变量x、y在坐标轴上取值,红色指示灯45在绘图仪xy内移动,表示变量x、y间建立函数y=f(x)。3]系统化表示:由第三滑块19表示的参量t变化,分别经过x、y两条变化途径,最后集中为红色指示灯45的点(x,y)变化,隐函数y=f(x)也就成为显函数,三个函数及其相互关系一目了然。
五、多函数曲线绘制:1]确定绘制曲线:在R1、R2、R3上依次分别同时绘制x=φ(t)、y=ψ(t)及y=f(x)的图像。2]将三只画笔4上的圆锥笔尖49伸出分别置于R1、R2、R3中初始点M0、P0、Q0处。3]选定第二控制器83中第三滑块 19的速率,同时分别按压第一控制器82和第三控制器84上运行键,三只画笔4 同时在R1、R2、R3上绘制图像,在第三滑块19到达点T0+β时,停止按压第一控制器82和第三控制器84,第二控制器83中第三滑块19的速率为零。4]将三只圆锥笔尖49缩回并固定。5]取出纸张R1、R2、R3,就得到黄色曲线x=φ (t)、蓝色曲线y=ψ(t),t∈[α,β]及红色曲线y=f(x),x∈[a,b]。
六、演示绘图结束:关闭控制盘8的电源,将W恢复到初始状态。
7.2具有在三块工件上同时分别切割槽沟的功能,操作步骤是:
一、机器组装,1]-6]与演示参数方程中三函数关系并同时分别绘制出图像的相同。7]取三支切割工具5分别置于xy框架、xt框架、yt框架内的平移机构2 上,切刀56朝向外方并把它们缩进用第七销钉57固定,三个切刀56分别记为甲切刀56、乙切刀56、丙切刀56。
二、符号设置:设参数方程为:x=φ(t),y=ψ(t),t∈[α,β],变量x和y间的隐函数为y=f(x),x∈[a,b],y∈[c,d],函数x=φ(t)、y=ψ(t)、y=f(x)的图像所在平面直角坐标系分别是Oxt、Oyt、Oxy,全自动参数方程多函数同步演示绘图切割一体机用字母W表示。1]在W中由xy框架及内部的平移机构2、甲切刀56和外侧的托板7构成独立的装置记为xy切割机,用于构造坐标系Oxy,其中,第一方管11和第二方管12的中心线分别与Oxy中Ox轴和Oy轴平行,第一滑块 17和第二滑块18的中心点位置分别表示变量x和y的取值,甲切刀56与所在的方管枢纽21的中心线重合,其上各点的位置表示Oxy中动点M的坐标(x,y)。 2]W中由xt框架及内部的平移机构2、驱动器3、乙切刀56和外侧的托板7构成独立的装置记为xt切割机,用于构造坐标系Oxt,其中,第二方管12和第三方管13的中心线分别与Oxt中Ox轴和Ot轴平行,第二滑块18和第三滑块19 的中心点位置分别表示变量x和参量t的取值,切割机与所在的方管枢纽21的中心线重合,其上各点的位置表示Oxt中动点P的坐标(t,x)。3]W中由yt框架及内部的平移机构2、驱动器3、丙切刀56和外侧的托板7构成独立的装置记为 yt切割机,用于构造坐标系Oyt,其中,第三方管13和第一方管11的中心线分别与Oyt中Oy轴和Ot轴平行,第一滑块17和第三滑块19的中心点位置分别表示变量y和参量t的取值,丙切刀56与所在的方管枢纽21的中心线重合,其上各点的位置表示Oyt中动点Q的坐标(t,y)。4]W中所有平移机构2上贴标2310 都表示所在坐标系中横轴的位置。5]W中第一滑块17、第二滑块18和第三滑块 19向外滑动为增加,反之,向内滑动为减少。
三、初始位置调整:1]接通控制盘8的电源,打开电源开关85。2]取三块平板工件分别记为R1、R2、R3,中心点O。3]在工件R1上画坐标系O1xy及初始点M0(a,c),在R2上画坐标系O2xt及初始点P0(α,a),在R3上画坐标系O1yt 及初始点Q0(α,c)。4]分别将工件R1、R2、R3置于三个托板7上,使各个坐标轴与W中第一标尺113平行并同向,P0(α,a)和Q0(α,c)在第三方管13上的投影点为同一点T0,M0(a,c)和Q0(α,c)在第一方管11上的投影点为同一点Y0,M0(a,c)和P0(α,a)在第二方管12上的投影点为同一点X0。5]用第二控制器83或手动摇把613调整第三滑块19位于点T0处,用第三控制器84调整丙切刀56对准点Q0后固定,第一滑块17位于点Y0处,用第一控制器82调整乙切刀56对准点P0后固定,第二滑块18位于点X0处,甲切刀56对准M0。 6]将绘图仪xy上的贴标2310调至与工件R1上的x轴位置相同,绘图仪xt上的贴标2310调至与工件R2上的t轴位置相同,绘图仪yt上的贴标2310调至与工件R3上的t轴位置相同。
四、多槽沟切割:1]确定切割的曲线槽沟:在R1、R2、R3上依次分别同时切割曲线x=φ(t)、y=ψ(t)及y=f(x)形状的槽沟。2]将甲、乙、丙切刀56伸出分别置于R1、R2、R3中初始点M0、P0、Q0处。3]选定第二控制器83中第三滑块19的速率,同时分别按压第一控制器82和第三控制器84上运行键,甲、乙、丙切刀56同时在R1、R2、R3上切割曲线槽沟,在第三滑块19到达点T0+β时,停止按压第一控制器82和第三控制器84,第二控制器83中第三滑块19的速率为零。4]将三只切刀56缩回并固定。5]取出工件R1、R2、R3,就得到曲线状槽沟x=φ(t)、y=ψ(t),t∈[α,β]及y=f(x),x∈[a,b]。
五、切割结束:关闭控制盘8的电源,将W恢复到初始状态。
7.3具有在立体内直角三平面上同时分别切割槽沟的功能,操作步骤是:
一、机器组装:与在三块工件上同时分别切割槽沟的相同。
二、符号设置:与在三块工件上同时分别切割槽沟的相同。
三、初始位置调整:设要加工的内直角立体记为Ω,Ω的一个内平面置于稳定的水平上记为底面,另两个内平面垂直向上记为立面。1]将W中的三个托板7 卸下,转动吸盘111垂直向外,把W的支脚112置于Ω的底面上调稳,吸盘111 固定在Ω的两个立面上,Ω上与框架xy、xt、yt相对的平面依次记为R1、R2、 R3。2]接通控制盘8的电源,打开电源开关85。3]在R1上画坐标系O1xy及初始点M0(a,c),在R2上画坐标系O2xt及初始点P0(α,a),在R3上画坐标系 O1yt及初始点Q0(α,c)。使各个坐标轴与W中第一标尺113平行并同向,P0(α, a)和Q0(α,c)在第三方管13上的投影点为同一点T0,M0(a,c)和Q0(α,c)在第一方管11上的投影点为同一点Y0,M0(a,c)和P0(α,a)在第二方管12上的投影点为同一点X0。4]用第二控制器83或手动摇把613调整第三滑块19位于点T0处,用第三控制器84调整丙切刀56对准点Q0后固定,第一滑块17位于点Y0处,用第一控制器82调整乙切刀56对准点P0后固定,第二滑块18位于点X0处,甲切刀56对准M0。5]将切割机xy上的贴标2310调至与R1上的x 轴位置相同,切割机xt上的贴标2310调至与R2上的t轴位置相同,切割机yt 上的贴标2310调至与R3上的t轴位置相同。
四、多槽沟切割:与在三块工件上同时分别切割槽沟的相同。
五、切割结束:关闭控制盘8的电源,将W移开并恢复到初始状态。
7.4具有在立体外直角三平面上同时分别切割槽沟的功能,操作步骤是:
一、机器组装:与在立体内直角三平面上同时分别切割槽沟的相同。
二、符号设置:与在立体内直角三平面上同时分别切割槽沟的相同。
三、初始位置调整:设要加工的外直角立体为Ω,将Ω的外直角朝上且处于稳定状态。1]将W中的三个切割工具5反向安装(切刀56向内),转动吸盘 111垂直向内,把W置于Ω的外直角上,吸盘111固定在Ω的三个平面上,Ω上与框架xy、xt、yt相对的平面依次记为R1、R2、R3。2]-5]与在在立体内直角三平面上同时分别切割槽沟的相同。
四、多槽沟切割:与在立体内直角三平面上同时分别切割槽沟的相同。
五、切割结束:关闭控制盘8的电源,将W移下并恢复到初始状态。
7.5具有打印、喷涂、擦拭等功能,只要将切割工具5的切刀56更换为专用工具即可,操作步骤是可参照切割机。
本实用新型方案所公开的技术手段不仅限于上述技术手段所公开的技术手段,还包括由以上技术特征等同替换所组成的技术方案。本实用新型的未尽事宜,属于本领域技术人员的公知常识。
全自动参数方程多函数同步演示绘图切割一体机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0