





专利摘要
本实用新型公开了一种具有障碍物检测功能的建筑消防设备,属于建筑消防设备技术领域,包括消防机器人主体,所述消防机器人主体对应驱动轴的端面固定连接有外侧轮盘,且相对两个外侧轮盘之间通过内侧轮盘固定连接,并且内侧轮盘固定连接在驱动轴的表面。本实用新型中,通过超声波探测头、液压缸、履带、缓冲垫、活动轮盘以及内侧轮盘之间的互相配合,超声波探测头所发出的超声波,监测到的距离小于设置好的距离阈值时,说明在超声波探测头和被探测物体间出现了障碍物,通过多个液压缸同时驱动,活动轮盘伸出的过程中将履带拉直,进而增大内侧轮盘的行走直径,便于翻越一些体积相对较大的障碍物,大大提高了消防机器人主体的灭火效率。
权利要求
1.一种具有障碍物检测功能的建筑消防设备,包括消防机器人主体(1),其特征在于,所述消防机器人主体(1)对应驱动轴(4)的端面固定连接有外侧轮盘(5),且相对两个外侧轮盘(5)之间通过内侧轮盘(6)固定连接,并且内侧轮盘(6)固定连接在驱动轴(4)的表面,所述内侧轮盘(6)的外侧圆周面开设有插接槽(7),所述插接槽(7)内滑动连接有活动轮盘(8),所述活动轮盘(8)的内侧弧面通过液压缸(10)与驱动轴(4)的表面固定连接,所述活动轮盘(8)的外侧弧面固定连接有缓冲垫(9),所述内侧轮盘(6)的侧面开设有连接槽(11),并且插接槽(7)内侧壁对应缓冲垫(9)的位置开设有连接孔(12),并且插接槽(7)通过连接孔(12)与连接槽(11)相连通,所述连接孔(12)内套设有履带(13),所述履带(13)的一端面与缓冲垫(9)的侧壁固定连接,所述履带(13)的另一端面绕过定滑轮(14)的表面缠绕连接在绕带轮(15)的表面。
2.根据权利要求1所述的一种具有障碍物检测功能的建筑消防设备,其特征在于,所述绕带轮(15)固定连接在转轴(16)的表面,所述转轴(16)的端面套接有轴承(17),所述轴承(17)卡接在连接槽(11)的内侧壁,并且连接槽(11)的内侧壁通过扭力弹簧(18)与绕带轮(15)的表面固定连接,并且扭力弹簧(18)套接在转轴(16)的表面。
3.根据权利要求1所述的一种具有障碍物检测功能的建筑消防设备,其特征在于,所述插接槽(7)的数量为若干个,且若干个插接槽(7)以驱动轴(4)的轴心为圆心呈环形阵列,所述连接槽(11)的数量与插接槽(7)的数量相等,且若干个插接槽(7)与若干个连接槽(11)互相交错设置。
4.根据权利要求1所述的一种具有障碍物检测功能的建筑消防设备,其特征在于,所述消防机器人主体(1)的顶部设置有法兰连接头(2),并且消防机器人主体(1)表面对应法兰连接头(2)的位置设置有洒水管(3),并且消防机器人主体(1)顶部对应洒水管(3)的位置设置有超声波探测头(19)。
5.根据权利要求1所述的一种具有障碍物检测功能的建筑消防设备,其特征在于,所述缓冲垫(9)远离活动轮盘(8)的一面为弧形结构,且缓冲垫(9)以及活动轮盘(8)的圆心均与驱动轴(4)的轴心重合。
6.根据权利要求1所述的一种具有障碍物检测功能的建筑消防设备,其特征在于,所述活动轮盘(8)的厚度与相对两个外侧轮盘(5)之间的距离相等,并且活动轮盘(8)的表面为蜂窝状结构,并且缓冲垫(9)具有耐高温、耐摩擦等优良特性。
说明书
技术领域
本实用新型属于建筑消防设备技术领域,尤其涉及一种具有障碍物检测功能的建筑消防设备。
背景技术
消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈。
现有消防机器人为了更好的规避障碍物,当消防机器人内设检测单元探测到障碍物时,便会控制行走机构绕行,通常仅能够在路况较为平坦的区域行驶,遇到一些体积相对较大的障碍物时,消防机器人便不能很好的行进,且在绕行的过程中,容易使消防管与周围是物体发生缠绕,降低了消防机器人的救援效率,因此,现阶段市场上亟需一种具有障碍物检测功能的建筑消防设备来解决上述问题。
实用新型内容
本实用新型的目的在于:为了解决现有消防机器人为了更好的规避障碍物,当消防机器人内设检测单元探测到障碍物时,便会控制行走机构绕行,通常仅能够在路况较为平坦的区域行驶,遇到一些体积相对较大的障碍物时,消防机器人便不能很好的行进,且在绕行的过程中,容易使消防管与周围是物体发生缠绕,降低了消防机器人救援效率的问题,而提出的一种具有障碍物检测功能的建筑消防设备。
为了实现上述目的,本实用新型采用了如下技术方案:
一种具有障碍物检测功能的建筑消防设备,包括消防机器人主体,所述消防机器人主体对应驱动轴的端面固定连接有外侧轮盘,且相对两个外侧轮盘之间通过内侧轮盘固定连接,并且内侧轮盘固定连接在驱动轴的表面,所述内侧轮盘的外侧圆周面开设有插接槽,所述插接槽内滑动连接有活动轮盘,所述活动轮盘的内侧弧面通过液压缸与驱动轴的表面固定连接,所述活动轮盘的外侧弧面固定连接有缓冲垫,所述内侧轮盘的侧面开设有连接槽,并且插接槽内侧壁对应缓冲垫的位置开设有连接孔,并且插接槽通过连接孔与连接槽相连通,所述连接孔内套设有履带,所述履带的一端面与缓冲垫的侧壁固定连接,所述履带的另一端面绕过定滑轮的表面缠绕连接在绕带轮的表面。
作为上述技术方案的进一步描述:
所述绕带轮固定连接在转轴的表面,所述转轴的端面套接有轴承,所述轴承卡接在连接槽的内侧壁,并且连接槽的内侧壁通过扭力弹簧与绕带轮的表面固定连接,并且扭力弹簧套接在转轴的表面。
作为上述技术方案的进一步描述:
所述插接槽的数量为若干个,且若干个插接槽以驱动轴的轴心为圆心呈环形阵列,所述连接槽的数量与插接槽的数量相等,且若干个插接槽与若干个连接槽互相交错设置。
作为上述技术方案的进一步描述:
所述消防机器人主体的顶部设置有法兰连接头,并且消防机器人主体表面对应法兰连接头的位置设置有洒水管,并且消防机器人主体顶部对应洒水管的位置设置有超声波探测头。
作为上述技术方案的进一步描述:
所述缓冲垫远离活动轮盘的一面为弧形结构,且缓冲垫以及活动轮盘的圆心均与驱动轴的轴心重合。
作为上述技术方案的进一步描述:
所述活动轮盘的厚度与相对两个外侧轮盘之间的距离相等,并且活动轮盘的表面为蜂窝状结构,并且缓冲垫具有耐高温、耐摩擦等优良特性。
综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
1、本实用新型中,通过超声波探测头、液压缸、履带、缓冲垫、活动轮盘、外侧轮盘以及内侧轮盘之间的互相配合,超声波探测头所发出的超声波,监测到的距离小于设置好的距离阈值时,说明在超声波探测头和被探测物体间出现了障碍物,通过多个液压缸同时驱动,活动轮盘伸出的过程中将履带拉直,进而增大内侧轮盘的行走直径,便于翻越一些体积相对较大的障碍物,大大提高了消防机器人主体的灭火效率。
2、本实用新型中,通过设置扭力弹簧、转轴和轴承,轴承和转轴作为绕带轮与连接槽之间的连接媒介,使得履带在进行收放的过程中绕带轮可进行相应的旋转动作,将履带缠绕连接在绕带轮的表面后,拉动履带移出连接槽的过程中,会使绕带轮发生旋转动作,且在此过程中,会扭动扭力弹簧并使其发生形变,因而当活动轮盘回收撤去作用在履带上的拉扯力的过程中,履带受扭力弹簧复位弹力的作用下,重新缠绕连接在绕带轮的表面,通过设置定滑轮,定滑轮用于改变履带的传动方向,同时也对履带起到支撑以及固定的效果,使得履带在与地面发生接触的过程中可提高履带的载荷能力,通过设置法兰连接头和洒水管,法兰连接头用于外接消防管道,进入消防机器人主体内部后再次进行增加并经洒水管喷射在火灾区域,通过设置缓冲垫,缓冲垫可使得活动轮盘具有一定的缓冲能力,避免互动轮盘与地面接触瞬间所产生的反作用力直接作用在液压缸上,因而便可对液压缸起到一定的保护作用。
附图说明
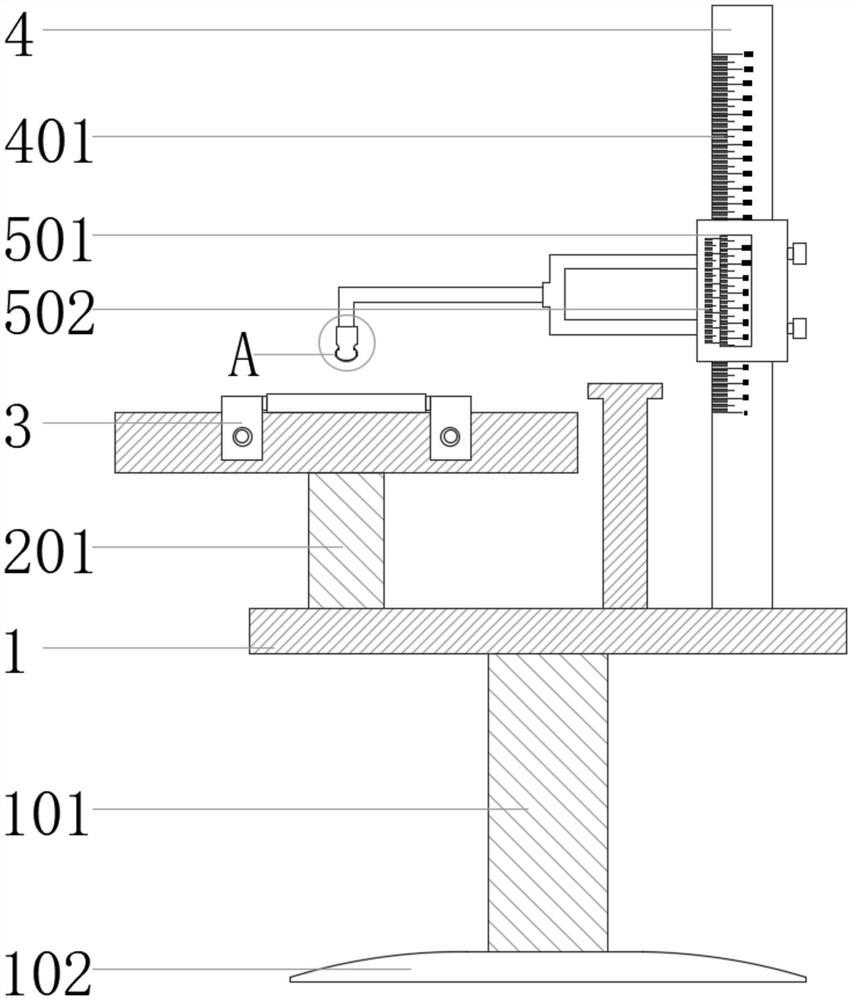
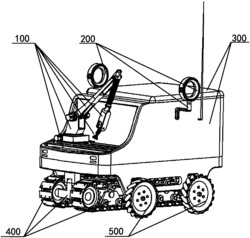
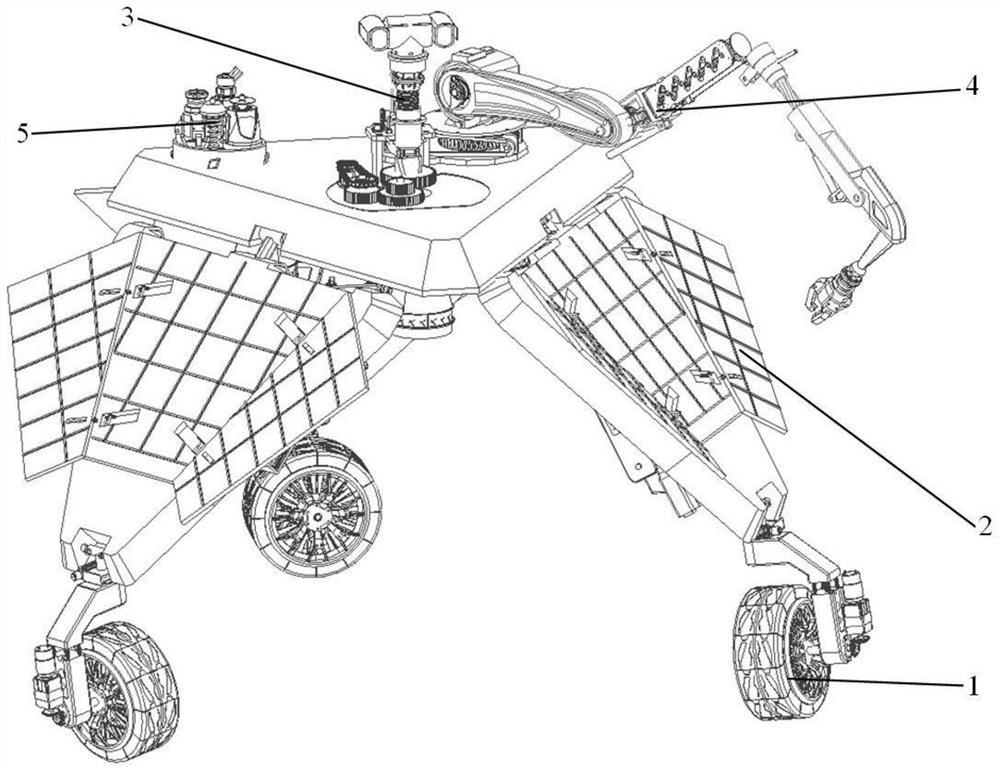
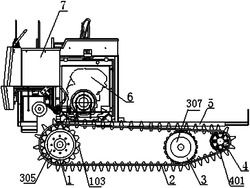
图1为本实用新型提出的一种具有障碍物检测功能的建筑消防设备立体的结构示意图;
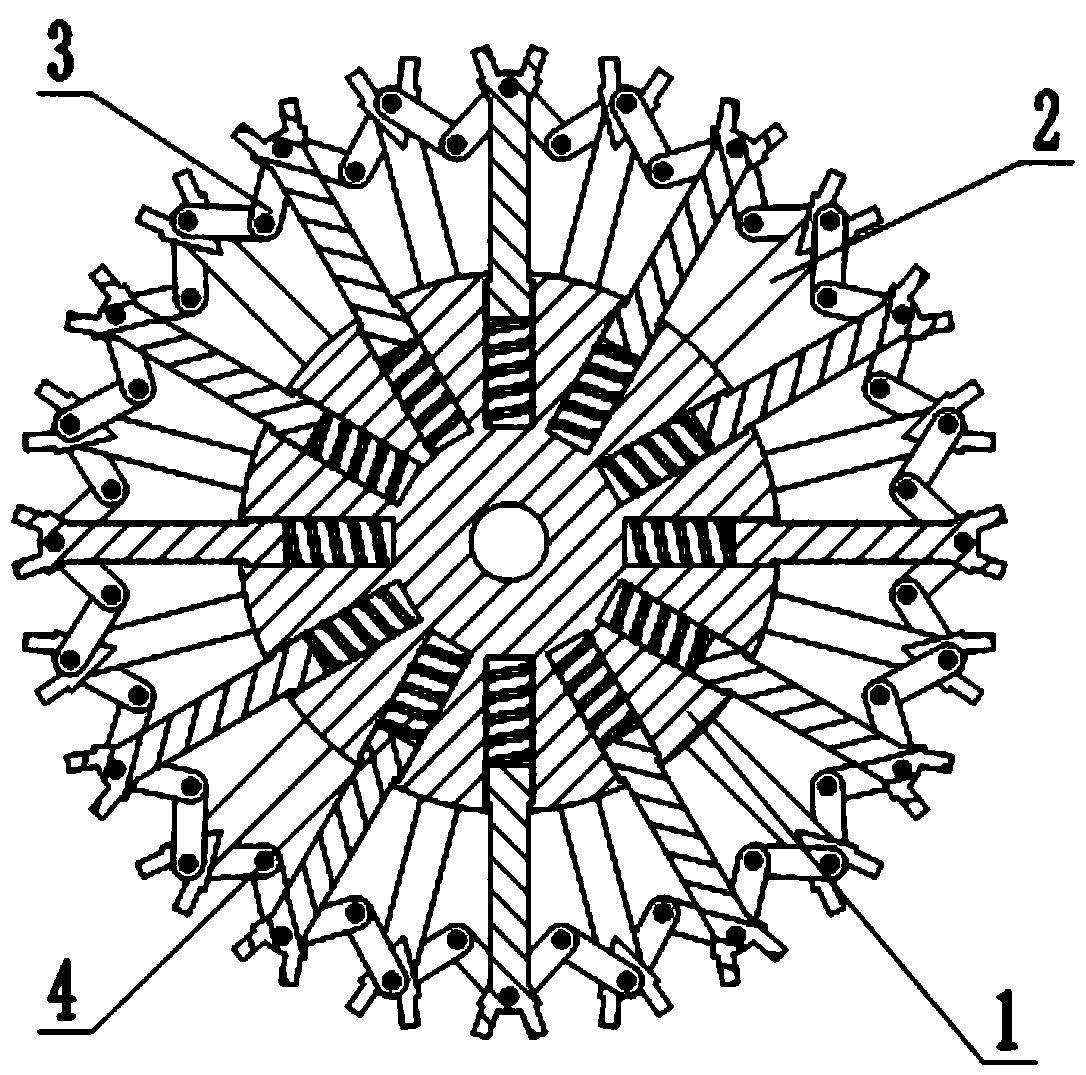
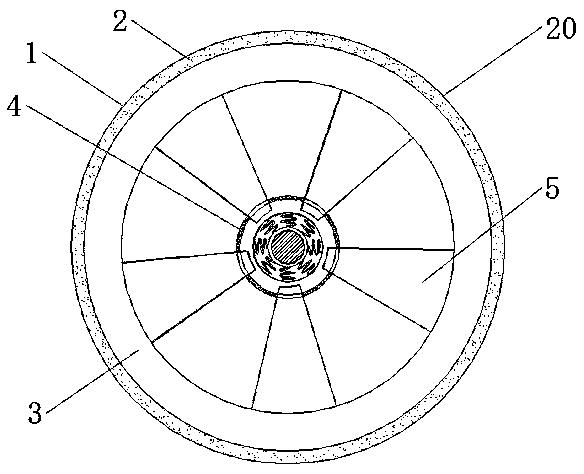
图2为本实用新型提出的一种具有障碍物检测功能的建筑消防设备内侧轮盘侧视的剖面结构示意图;
图3为本实用新型提出的一种具有障碍物检测功能的建筑消防设备A处放大的结构示意图;
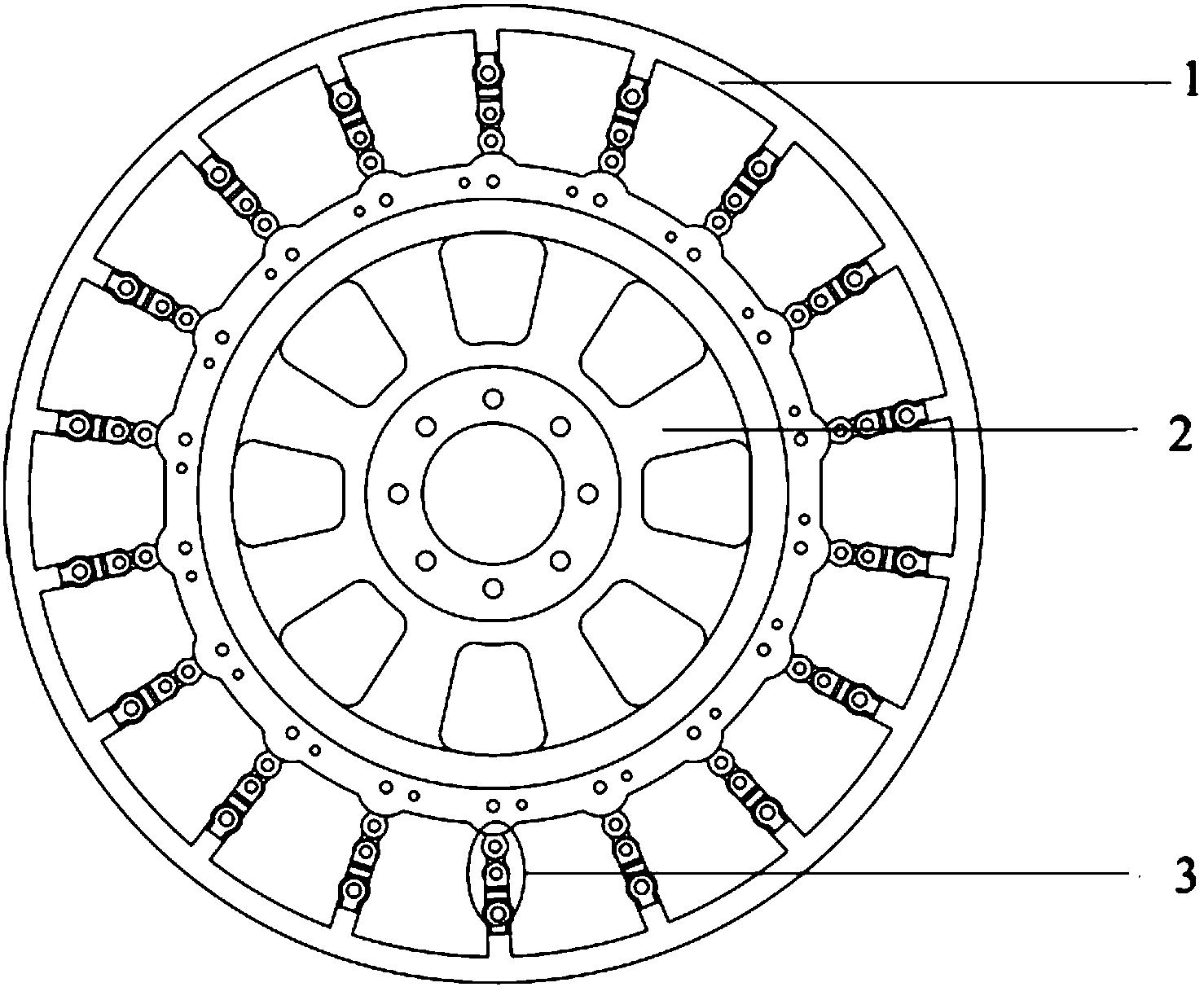
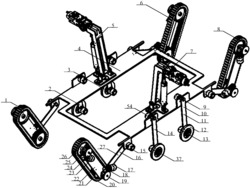
图4为本实用新型提出的一种具有障碍物检测功能的建筑消防设备绕带轮侧视的结构示意图。
图例说明:
1、消防机器人主体;2、法兰连接头;3、洒水管;4、驱动轴;5、外侧轮盘;6、内侧轮盘;7、插接槽;8、活动轮盘;9、缓冲垫;10、液压缸;11、连接槽;12、连接孔;13、履带;14、定滑轮;15、绕带轮;16、转轴;17、轴承;18、扭力弹簧;19、超声波探测头。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
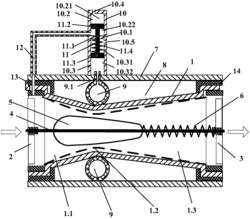
请参阅图1-4,本实用新型提供一种技术方案:一种具有障碍物检测功能的建筑消防设备,包括消防机器人主体1,消防机器人主体1对应驱动轴4的端面固定连接有外侧轮盘5,且相对两个外侧轮盘5之间通过内侧轮盘6固定连接,并且内侧轮盘6固定连接在驱动轴4的表面,内侧轮盘6的外侧圆周面开设有插接槽7,插接槽7内滑动连接有活动轮盘8,活动轮盘8的内侧弧面通过液压缸10与驱动轴4的表面固定连接,通过设置液压缸10、履带13和活动轮盘8,液压缸10进行伸展动作,因而当需要机器人进行翻越障碍物的时候,通过多个液压缸10同时驱动,带动活动轮盘8伸出,活动轮盘8伸出的过程中将履带13拉直,进而增大内侧轮盘6的行走直径,便于翻越障碍物,活动轮盘8的外侧弧面固定连接有缓冲垫9,通过设置缓冲垫9,缓冲垫9可使得活动轮盘8具有一定的缓冲能力,避免互动轮盘与地面接触瞬间所产生的反作用力直接作用在液压缸10上,因而便可对液压缸10起到一定的保护作用,内侧轮盘6的侧面开设有连接槽11,并且插接槽7内侧壁对应缓冲垫9的位置开设有连接孔12,并且插接槽7通过连接孔12与连接槽11相连通,连接孔12内套设有履带13,履带13的一端面与缓冲垫9的侧壁固定连接,履带13的另一端面绕过定滑轮14的表面缠绕连接在绕带轮15的表面,通过设置定滑轮14,定滑轮14用于改变履带13的传动方向,同时也对履带13起到支撑以及固定的效果,使得履带13在与地面发生接触的过程中可提高履带13的载荷能力。
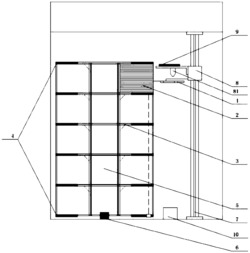
具体的,如图2所示,绕带轮15固定连接在转轴16的表面,转轴16的端面套接有轴承17,轴承17卡接在连接槽11的内侧壁,并且连接槽11的内侧壁通过扭力弹簧18与绕带轮15的表面固定连接,并且扭力弹簧18套接在转轴16的表面,通过设置扭力弹簧18、转轴16和轴承17,轴承17和转轴16作为绕带轮15与连接槽11之间的连接媒介,使得履带13在进行收放的过程中绕带轮15可进行相应的旋转动作,将履带13缠绕连接在绕带轮15的表面后,拉动履带13移出连接槽11的过程中,会使绕带轮15发生旋转动作,且在此过程中,会扭动扭力弹簧18并使其发生形变,因而当活动轮盘8回收撤去作用在履带13上的拉扯力的过程中,履带13受扭力弹簧18复位弹力的作用下,重新缠绕连接在绕带轮15的表面。
具体的,如图2所示,插接槽7的数量为若干个,且若干个插接槽7以驱动轴4的轴心为圆心呈环形阵列,连接槽11的数量与插接槽7的数量相等,且若干个插接槽7与若干个连接槽11互相交错设置。
具体的,如图1所示,消防机器人主体1的顶部设置有法兰连接头2,并且消防机器人主体1表面对应法兰连接头2的位置设置有洒水管3,通过设置法兰连接头2和洒水管3,法兰连接头2用于外接消防管道,进入消防机器人主体1内部后再次进行增加并经洒水管3喷射在火灾区域,并且消防机器人主体1顶部对应洒水管3的位置设置有超声波探测头19,通过设置超声波探测头19,超声波探测头19所发出的超声波,监测到的距离小于设置好的距离阈值时,说明在超声波探测头19和被探测物体间出现了障碍物,超声波探测头19所得到的信号发送至消防机器人主体1内设控制器处。
具体的,如图2所示,缓冲垫9远离活动轮盘8的一面为弧形结构,且缓冲垫9以及活动轮盘8的圆心均与驱动轴4的轴心重合。
具体的,如图2所示,活动轮盘8的厚度与相对两个外侧轮盘5之间的距离相等,并且活动轮盘8的表面为蜂窝状结构,并且缓冲垫9具有耐高温、耐摩擦等优良特性。
工作原理:使用时,法兰连接头2和洒水管3,法兰连接头2用于外接消防管道,进入消防机器人主体1内部后再次进行增加并经洒水管3喷射在火灾区域,超声波探测头19所发出的超声波,监测到的距离小于设置好的距离阈值时,说明在超声波探测头19和被探测物体间出现了障碍物,超声波探测头19所得到的信号发送至消防机器人主体1内设控制器处,接着由控制器向液压缸10发出相应的控制指令,使液压缸10进行伸展动作,因而当需要机器人进行翻越障碍物的时候,通过多个液压缸10同时驱动,带动活动轮盘8伸出,活动轮盘8伸出的过程中将履带13拉直,且轴承17和转轴16作为绕带轮15与连接槽11之间的连接媒介,使得履带13在进行收放的过程中绕带轮15可进行相应的旋转动作,将履带13缠绕连接在绕带轮15的表面后,拉动履带13移出连接槽11的过程中,会使绕带轮15发生旋转动作,且在此过程中,会扭动扭力弹簧18并使其发生形变,因而当活动轮盘8回收撤去作用在履带13上的拉扯力的过程中,履带13受扭力弹簧18复位弹力的作用下,重新缠绕连接在绕带轮15的表面,同时定滑轮14用于改变履带13的传动方向,同时也对履带13起到支撑以及固定的效果,使得履带13在与地面发生接触的过程中可提高履带13的载荷能力,进而增大内侧轮盘6的行走直径,且缓冲垫9可使得活动轮盘8具有一定的缓冲能力,避免互动轮盘与地面接触瞬间所产生的反作用力直接作用在液压缸10上,因而便可对液压缸10起到一定的保护作用,便于翻越障碍物,大大提高了消防机器人主体1的灭火效率。
以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
具有障碍物检测功能的建筑消防设备专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0