








专利摘要
本发明公开了一种高速机构减小残余振动的S型运动曲线规划方法,该高速机构减小残余振动的S型运动曲线规划方法包括以下步骤:根据S型运动曲线的定义,运动分为以急动度G1进行的加加运动速段(T1);以急动度G2进行的减加运动速段(T2),匀速运动段T3,以急动度G3进行的减加运动速段(T4);以急动度G4进行的减减运动速段(T5);以急动度G5进行的减减运动速段(T6)。本发明通过增加考虑残余振动的衰减时间T6,减少了残余振动的影响。本发明考虑了机构系统的运动所导致的动力学残余振动对实际运动定位时间的影响,实现了实际运动的平稳性和生产效率的最大化。
权利要求
1.一种高速机构减小残余振动的S型运动曲线规划方法,其特征在于,该高速机构减小残余振动的S型运动曲线规划方法包括以下步骤:
步骤一、根据机构几何模型,建立多刚体动力学模型;
步骤二、根据高精度截尾模态动态子结构,建立柔性多体动力学模型;
步骤三、根据运动参数(T1-T5,G1-G4)得到参数化S型运动函数;
步骤四、然后根据得到的参数化S型运动函数进行定位过程仿真;
步骤五、判断残余振动是否小于定位精度,若不小于则继续运动过程仿真;若小于则进行下一步残余振动衰减时间的测定;
步骤六、通过残余振动衰减时间的测定,判断定位时间是否为最短。若是,那么该方案每个步骤都设计合理,即完成了方案设计;若不是,那么需要返回通过对运动参数进行调整来重新修改参数化S型运动函数。
2.如权利要求1所述的高速机构减小残余振动的S型运动曲线规划方法,其特征在于,根据S型运动曲线的定义,运动分为以急动度G1进行的加加运动速段(T1);以急动度G2进行的减加运动速段(T2),匀速运动段T3,以急动度G3进行的减加运动速段(T4);以急动度G4进行的减减运动速段(T5);为了考虑残余振动的影响,增加考虑残余振动的衰减时间T6。
3.如权利要求1所述的高速机构减小残余振动的S型运动曲线规划方法,其特征在于,根据S型运动的特点,各加速过程中急动度为常数,匀速运动段加速度为0,运动结束时速度,加速度均为零;因此,有下列等等式约束:
T1G1=T2G2
T4G3=T5G4
T1G1(T1+T2)=T4G3(T4+T5)
因此,T2,T4,T5均可以用T1来表示。
4.如权利要求1所述的高速机构减小残余振动的S型运动曲线规划方法,其特征在于,衰减时间T6由下式判断
abs(s-s*)+abs(v)<ε
在残余振动时,速度v要比位移数s值大,当速度v为几乎0,即当机构位置s落在定位精度ε范围内,上式才成立。
5.如权利要求1所述的高速机构减小残余振动的S型运动曲线规划方法,其特征在于,高速机构减小残余振动的S型运动曲线规划的模型为:
T=T1+T2+T3+T4+T5+T6
Find(G1,G2,G3,G4,T1,T3)
Objective:Min(T)
Subjuect to:abs(s-s*)+abs(v)<ε
T1G1=T2G2
T4G3=T5G4
T1G1(T1+T2)=T4G3(T4+T5)。
说明书
技术领域
本发明属于机械工程与数学研究技术领域,尤其涉及一种高速机构减小残余振动的S型运动曲线规划方法。
背景技术
出于提高生产效率的需要,大批高速机构被应用于生产制造领域,为了降低运动过程中产生的冲击,高速机构快速启停主要采用S型曲线进行运动速度规划,选取不同的急动度,可以获得不同形状的S型运动规划曲线,目前的S型曲线规划方法主要侧重于保证机构的运动曲线在几何上的平顺性,很少考虑机构的惯性、驱动能力、驱动负载等动力学效应的影响,但机构运动速度的提高不可避免地将增加机构的柔性残余振动对机构运动精度的影响,特别的,对于高速精密机械,其运动规划不仅要最大限度地减少运动时间,还要保证所需的定位精度要求,通常情况下,运动时间越短,引起的冲击越大,残余振动要经过更长的时间才能衰减到给定的定位。
当前常见的S型曲线运动规划方法,即主要考虑运动曲线几何平顺性的S型曲线规划方法,未充分考虑到机构系统的运动所导致的动力学残余振动对实际运动定位时间的影响,导致实际运动定位所耗费的时间较多,不能兼顾实际运动的平稳性和生产效率的最大化。
发明内容
本发明实施例的目的在于提供一种减小高速机构减小残余振动的S型运动曲线规划方法,旨在解决现有的S型曲线运动规划方法,主要考虑运动曲线几何平顺性的S型曲线规划方法,没有充分考虑到机构系统的运动所导致的动力学残余振动对实际运动定位时间的影响,导致实际运动定位所耗费的时间较多,不能兼顾实际运动的平稳性和生产效率的最大化的问题。
本发明实施例是这样实现的,一种高速机构减小残余振动的S型运动曲线规划方法,该高速机构减小残余振动的S型运动曲线规划方法包括以下步骤:
步骤一、根据机构几何模型,建立多刚体动力学模型;
步骤二、根据高精度截尾模态动态子结构,建立柔性多体动力学模型;
步骤三、根据运动参数(T1-T5,G1-G4)得到参数化S型运动函数;
步骤四、然后根据得到的参数化S型运动函数进行定位过程仿真;
步骤五、判断残余振动是否小于定位精度,若不小于则继续运动过程仿真;若小于则进行下一步残余振动衰减时间的测定;
步骤六、通过残余振动衰减时间的测定,判断定位时间是否为最短。若是,那么该方案每个步骤都设计合理,即完成了方案设计;若不是,那么需要返回通过对运动参数进行调整来重新修改参数化S型运动函数。
进一步,根据S型运动曲线的定义,运动分为以急动度G1进行的加加运动速段(T1);以急动度G2进行的减加运动速段(T2),匀速运动段T3,以急动度G3进行的减加运动速段(T4);以急动度G4进行的减减运动速段(T5);为了考虑残余振动的影响,增加考虑残余振动的衰减时间T6。
进一步,根据s型运动的特点,各加速过程中急动度为常数,匀速运动段加速度为0,运动结束时速度,加速度均为零;因此,有下列等等式约束:
T1G1=T2G2
T4G3=T5G4
T1G1(T1+T2)=T4G3(T4+T5)
因此,T2,T4,T5均可以用T1来表示。
进一步,衰减时间T6由下式判断
abs(s-s*)+abs(v)<ε
在残余振动时,速度v要比位移s数值大,当速度v为几乎0,即当机构位置s落在定位精度ε范围内,上式才成立。
进一步,高速机构减小残余振动的S型运动曲线规划的模型为:
Find(G1,G2,G3,G4,T1,T3,T6)
Objective:Min(T)
本发明提供的高速机构减小残余振动的S型运动曲线规划方法,通过增加考虑残余振动的衰减时间T6,减少了残余振动的影响,较好的解决了现有的S型曲线运动规划方法,主要考虑运动曲线几何平顺性的S型曲线规划方法,没有充分考虑到机构系统的运动所导致的动力学残余振动对实际运动定位时间的影响,导致实际运动定位所耗费的时间较多,不能兼顾实际运动的平稳性和生产效率的最大化的问题。本发明考虑了机构系统的运动所导致的动力学残余振动对实际运动定位时间的影响,实现了实际运动的平稳性和生产效率的最大化。
附图说明
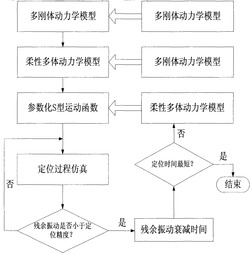
图1是本发明实施例提供的高速机构减小残余振动的S型运动曲线规划方法的流程图;
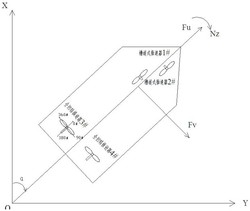
图2是本发明实施例提供的S型运动曲线的定义的示意图;
图3是本发明实施例提供的S型曲线运动180度的示意图;
图4是本发明实施例提供的S型曲线运动180度的曲线图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
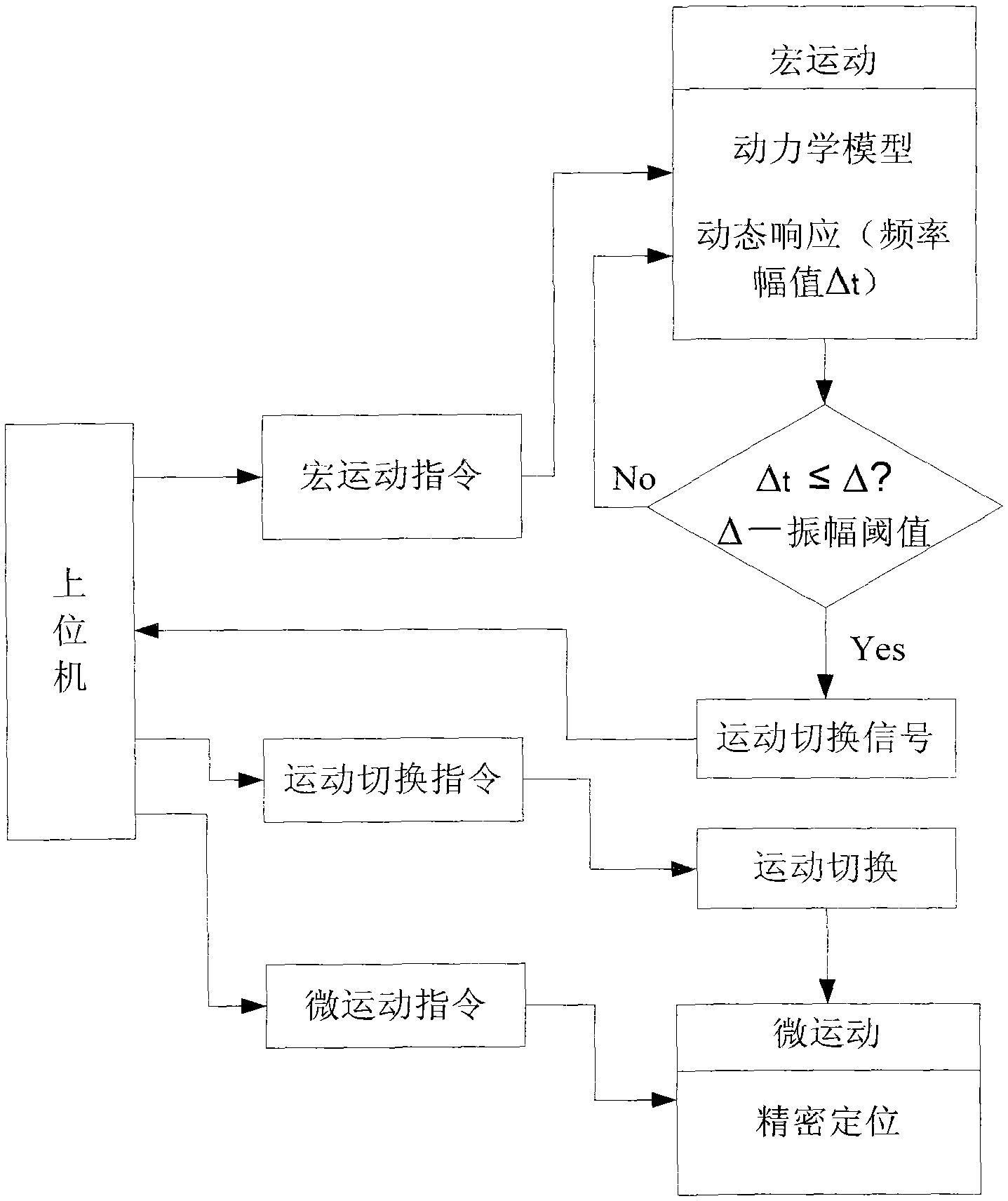
图1示出了本发明提供的高速机构减小残余振动的S型运动曲线规划方法流程。为了便于说明,仅仅示出了与本发明相关的部分。
本发明实施例的高速机构减小残余振动的S型运动曲线规划方法,该方法的步骤包括:
步骤一、根据机构几何模型,建立多刚体动力学模型;
步骤二、根据高精度截尾模态动态子结构,建立柔性多体动力学模型;
步骤三、根据运动参数(T1-T5,G1-G4)得到参数化S型运动函数;
步骤四、然后根据得到的参数化S型运动函数进行定位过程仿真;
步骤五、判断残余振动是否小于定位精度,若不小于则继续运动过程仿真;若小于则进行下一步残余振动衰减时间的测定;
步骤六、通过残余振动衰减时间的测定,判断定位时间是否为最短。若是,那么该方案每个步骤都设计合理,即完成了方案设计;若不是,那么需要返回通过对运动参数进行调整来重新修改参数化S型运动函数。
以急动度G2进行的减加运动速段(T2),匀速运动段T3,以急动度G3进行的减加运动速段(T4);以急动度G4进行的减减运动速段(T5);为了考虑残余振动的影响,增加考虑残余振动的衰减时间T6。
作为本发明实施例的一优化方案,根据S型运动的特点,各加速过程中急动度为常数,匀速运动段加速度为0,运动结束时速度,加速度均为零;因此,有下列等等式约束:
T1G1=T2G2
T4G3=T5G4
T1G1(T1+T2)=T4G3(T4+T5)
因此,T2,T4,T5均可以用T1来表示。
作为本发明实施例的一优化方案,衰减时间T6由下式判断
abs(s-s*)+abs(v)<ε
在残余振动时,速度v要比位移s数值大,当速度v为几乎0,即当机构位置s落在定位精度ε范围内,上式才成立。
作为本发明实施例的一优化方案,高速机构减小残余振动的S型运动曲线规划的模型为:
Find(G1,G2,G3,G4,T1,T3,T6)
Objective:Min(T)
下面结合附图及具体实施例对本发明的应用原理作进一步描述。
本发明的高速机构柔性多体S型运动速度规划模型:如图2所示,
根据S型运动曲线的定义,运动分为以急动度G1进行的加加运动速段(T1),以急动度G2进行的减加运动速段(T2),匀速运动段T3,以急动度G3进行的减加运动速段(T4),以急动度G4进行的减减运动速段(T5)。为了考虑残余振动的影响,本发明增加考虑残余振动的衰减时间T6,
根据S型运动的特点,各加速过程中急动度为常数,匀速运动段加速度为0,运动结束时速度,加速度均为零;因此,有下列等等式约束:
T1G1=T2G2
T4G3=T5G4
T1G1(T1+T2)=T4G3(T4+T5)
因此,T2,T4,T5均可以用T1来表示。
其中,衰减时间T6由下式判断
abs(s-s*)+abs(v)<ε
在残余振动时,速度要比位移数值大,当速度为几乎0,即当机构位置落在定位精度ε范围内,上式才成立。
综合考虑下,本发明的模型如下:
Find(G1,G2,G3,G4,T1,T3,T3)
Objective:Min(T)
本发明的具体实施例:如图3和图4所示,
摆杆半径80mm,宽10mm,厚5mm。材料为铝。按S型曲线运动180°;
径80mm,宽10mm,厚5mm。材料为铝。选择不同的S型曲线参数,可以看到,当驱动时间T=5ms时,引起的残余振动经过18.9ms才衰减到1um的定位精度,总的定位时间为0.0239s。而当驱动时间T=10ms时,引起的残余振动经过12.9ms才衰减到1um的定位精度,总的定位时间为22.9ms,反而更小。可见,将残余振动时间考虑进来,才能能够真实实现定位时间最小的速度规划。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种高速机构减小残余振动的S型运动曲线规划方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0