









专利摘要
本发明涉及一种基于ROS网络的服务机器人可视化远程控制系统,包括移动机器人平台模块、路由器模块、服务器及控制模块;移动机器人平台模块包括运动底盘以及安装于运动底盘上的Upboard、深度摄像头、无线网卡和MCU运动控制端,路由器模块包括与无线网卡组成ROS网络的无线路由器,Upboard将深度摄像头采集的图像进行处理并在ROS网络中广播,服务器接收图像,通过人工发出控制指令,并由串口通信将控制指令传递给MCU运动控制端。本发明在移动机器人工作时,人工可以在距离家里相对较远的地方来完成相应的指令操作,摆脱传统的通过安装在家里的摄像头监控家庭环境状况的方式。大大减少了开发成本、增加了移动机器人的灵活性。
权利要求
1.一种基于ROS网络的服务机器人可视化远程控制系统,其特征在于:包括移动机器人平台模块、路由器模块、服务器及控制模块;所述移动机器人平台模块包括运动底盘以及安装于运动底盘上的Upboard、深度摄像头、无线网卡和MCU运动控制端,所述运动底盘下方安装有受控于MCU运动控制端的麦克纳姆轮;
所述的路由器模块包括连接服务器及控制模块并与移动机器人平台模块的无线网卡组成ROS网络的无线路由器,Upboard将深度摄像头采集的图像进行处理并在ROS网络中广播,服务器接收图像;
所述服务器及控制模块由桌面计算机及工控板组成,通过人工发出控制指令,并由串口通信将控制指令传递给MCU运动控制端;
MCU运动控制端包括供电电源以及依次连接的MCU、光耦隔离单元、功率放大器、直流电机;所述的直流电机为控制麦克纳姆轮动作的带编码器的直流减速电机;
所述的Upboard搭载X5-Z8350处理器,采用分布式运算分配方法,通过无线路由器和无线网卡构建连接Upboard和服务器的ROS网络;
深度摄像头采集到的数据通过UPboard处理,无线路由器连接服务器与无线网卡组成ROS网络,采用Rviz3D可视化工具进行环境的监视,关于机器人的所有数据都在Rviz上进行可视化展示,使用Rviz进行视频流的查看,有两个步骤:第一步,运行节点启动深度摄像头,将深度摄像头的彩色视频流和深度视频流定义为消息,通过发布主题把消息广播到ROS网络中,第二步,启动Rviz通过订阅主题,接收并解耦深度摄像头节点发布的消息,通过视频的形式显示。
2.根据权利要求1所述的基于ROS网络的服务机器人可视化远程控制系统,其特征在于:所述深度摄像头采用RealSenseR200深度相机。
3.根据权利要求1所述的基于ROS网络的服务机器人可视化远程控制系统,其特征在于:所述MCU选用型号为STM32F103C8T6增强型系列的RAM处理器芯片,接收控制指令并输出相应的PWM信号。
4.根据权利要求1所述的基于ROS网络的服务机器人可视化远程控制系统,其特征在于:所述的工控板采用昆仑通态工控板。
说明书
技术领域
本发明涉及ROS服务机器人领域,具体涉及一种基于ROS网络的服务机器人可视化远程控制系统。
背景技术
近些年来机器人领域的一些先进技术对社会发展和工业生产做出了非常大的贡献,机器人系统在自动化生产领域、军事领域、医疗领域以及家庭服务等领域得到了广泛应用,越来越多的机器人应用出现在日常生活中,一步步改善我们的生活环境。家庭服务机器人产业的发展对国家现代化建设具有巨大的推动作用。传统的家庭服务机器人在开发智能化模块过程中需要大量代码的实现,开发成本高。工业的快速发展对传统服务机器人智能化、自动化水平有了更高的考验。机器视觉的广泛发展促进了更加智能化、更加轻巧便捷的服务机器人的发展。传统的家庭服务开发效率低、开发成本高。想要达到对家庭环境进行监视的目的,一般采用监视摄像头的方法,这种方法灵活性差。
发明内容
本发明对于现有技术的不足,提供了一种基于ROS网络的服务机器人可视化远程控制系统,利用安装在移动机器人上的深度摄像头实时的捕获机器人的运动状态,Upboard对深度摄像头采集到的信息进行处理,通过ROS网络将深度摄像头捕获的机器人运动状态以及家庭实时场景发送到远程桌面计算机,然后在远程桌面计算机上监视移动机器人的动作以及家庭的实时场景。人工通过远程桌面计算机判断移动机器人的动作以及家庭的实时场景,通过工控板发出指令,数传模块将指令信息传递给MCU运动控制端,通过PID控制算法对输出的PWM信号进行处理,控制带编码器的直流减速电机进行相应指令操作,从而控制移动机器人的移动,对家庭环境突发事件进行及时检测以及处理。
为解决上述问题,本发明采取的技术方案为:一种基于ROS网络的服务机器人可视化远程控制系统,包括移动机器人平台模块、路由器模块、服务器及控制模块;
所述移动机器人平台模块包括运动底盘、Up board、深度摄像头、无线网卡和MCU运动控制端,所述Up board、深度摄像头、无线网卡和MCU运动控制端均安装在运动底盘上。所述运动底盘下方安装有四个受控于MCU运动控制端的麦克纳姆轮,所述麦克纳姆轮能够全方位运动,具有很强的灵活性。
所述的路由器模块包括连接服务器及控制模块并与移动机器人平台模块的无线网卡组成ROS网络的无线路由器,Up board将深度摄像头采集的图像进行处理并通过发布话题方式在ROS网络中广播,服务器通过订阅解耦的方式接收图像;
所述服务器及控制模块由桌面计算机及工控板组成,通过人工发出控制指令,并由串口通信将控制指令传递给MCU运动控制端。
基于ROS网络的服务机器人可视化远程控制系统,基于ROS开发平台,具有易扩展性。利用ROS网络系统实时监测移动机器人的运行状况以及家庭环境状况,并对机器人的运行状态进行实时反馈,指导家庭服务机器人根据人的心理要求进行相应活动,及时的对家庭环境突发事件作出反应。
优选的,所述深度摄像头采用RealSense R200深度相头,该摄像头可以在不同的计算机系统上运行,RealSense R200安装在与相机配套的Up board上。
优选的,所述的Up board搭载X5-Z8350处理器,采用分布式运算分配方法,通过无线路由器和无线网卡构建连接Up board和服务器的ROS网络。
优选的,MCU运动控制端包括供电电源以及依次连接的MCU、光耦隔离单元、功率放大器、直流电机;所述的直流电机为控制麦克纳姆轮动作的带编码器的直流减速电机。
优选的,所述MCU选用型号为STM32F103C8T6增强型系列的RAM处理器芯片,接收由数传模块传递的控制指令并输出相应的PWM信号。
其中光耦隔离单元的作用是对MCU和功率放大器进行隔离保护;功率放大器的作用是对PWM信号的功率进行放大处理,对电流信号进行放大处理后对直流减速电机供电。
优选的,所述桌面计算机采用联想桌面电脑,所述的工控板采用昆仑通态工控板。
本发明的有益效果为:当人们在距离家里相对较远时,通过移动机器人上的深度摄像头实时的检测家庭环境状态以及移动机器人的运动状态,对家庭环境条件进行实时的检测,并通过调整移动机器人的运动状态进行相应的操作。
人工可以实时的检测移动机器人的运动状态,并通过工控板发出指令信息,指令信息通过串口通信、数传模块发送到MCU,生成PWM信号进而控制带编码器的直流减速电机运动,实现对家庭环境的实时检测以及通过移动机器人来完成相应的作业。这样在移动机器人工作时,人工可以在距离家里相对较远的地方来完成相应的指令操作,摆脱传统的通过安装在家里的摄像头监控家庭环境状况的方式。大大减少了开发成本、增加了移动机器人的灵活性。
附图说明
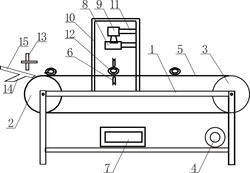
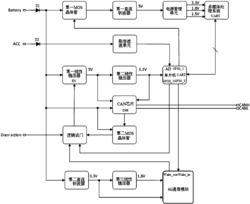
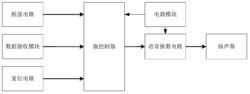
图1为本发明控制流程原理图;
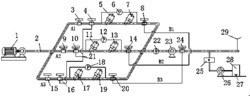
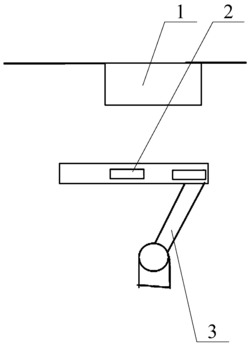
图2为本发明MCU运动控制端原理图;
图1中:1.桌面计算机,2.Up board,3.MCU控制运动端,4.深度摄像头,5.运动底盘。
具体实施方式
为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
一种基于ROS网络的服务机器人可视化远程控制系统,包括移动机器人平台模块、路由器模块、服务器及控制模块;
所述移动机器人平台模块包括运动底盘5以及安装于运动底盘5上的Up board 2、深度摄像头4、无线网卡和MCU运动控制端3,所述运动底盘5下方安装有四个受控于MCU运动控制端3的麦克纳姆轮;所述深度摄像头4通过USB与Up board 2连接,所述无线网卡安装在Up board 2用于构建ROS网络。
所述的路由器模块包括连接服务器及控制模块并与移动机器人平台模块的无线网卡组成ROS网络的无线路由器,Up board 2将深度摄像头4采集的图像进行处理并通过发布话题方式在ROS网络中广播,服务器通过订阅解耦的方式接收图像;
所述服务器及控制模块由桌面计算机1及工控板组成,通过人工发出控制指令并由串口通信将控制指令传递给MCU运动控制端3。所述桌面计算机1在启动系统时根据相机启动参数配置深度摄像头4的分辨率、帧数等参数。
优选的,所述深度摄像头4采用RealSense R200深度相头,该摄像头可以在不同的计算机系统上运行,RealSense R200安装在与相机配套的Up board上。
优选的,所述的Up board 2搭载X5-Z8350处理器,采用分布式运算分配方法,通过无线路由器和无线网卡构建连接Up board和服务器的ROS网络。
优选的,所述桌面计算机1采用联想桌面电脑,所述的工控板采用昆仑通态工控板。
如图2所示,MCU运动控制端3包括供电电源以及依次连接的MCU、光耦隔离单元、功率放大器、直流电机;所述的直流电机为控制麦克纳姆轮动作的带编码器的直流减速电机;所述MCU选用型号为STM32F103C8T6增强型系列的RAM处理器芯片,接收由数传模块传递的控制指令并输出相应的PWM信号。其中光耦隔离单元的作用是对MCU和功率放大器进行隔离保护;功率放大器的作用是对PWM信号的功率进行放大处理,对电流信号进行放大处理后对直流减速电机供电。
本控制系统中深度摄像头4采集到的数据通过UP board 2处理,无线路由器连接服务器与无线网卡组成ROS网络,在Ubuntu系统中,在ROS框架下使用RealSense R200深度相机采集数据,在计算科学和计算机图形学中,对真实领域中信息进行表示和可视化存在强烈的要求,采用Rviz3D可视化工具进行环境的监视,它工作在ROS框架中,基本上关于机器人的所有数据都可以在Rviz上进行可视化展示出来。本申请使用Rviz进行视频流的查看,有两个步骤:
第一步,运行节点启动RealSense R200深度相机,将相机的彩色视频流和深度视频流定义为消息(Message),通过发布主题(Topic)把消息广播到ROS网络中。
第二步,启动Rviz通过订阅主题,接收并解耦相机节点发布的消息,通过视频的形式显示。
一种基于ROS网络的服务机器人可视化远程控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0