

IPC分类号 : H02N2/00,H02N2/04,H02N2/06,A61M5/145,A61M5/168






专利摘要
本实用新型公开了一种高精度的多通道超磁致伸缩输液装置,包括:基座,其上并列设置有多个用于安装输液器的输液器安装位,多个输液器对应安装于输液器安装位内;超磁致伸缩装置,沿多个输液器安装位排列的方向可移动的安装于基座上;控制器,与超磁致伸缩装置连接,用于控制超磁致伸缩装置的移动至需输液的输液器安装位处并控制超磁致伸缩装置伸缩推动输液器的活塞杆移动实现输液和控制输液量。本实用新型提供的高精度的多通道超磁致伸缩输液装置可精准调节输液速度和输液量以及自动反馈相关数据给医护人员,无需更换输液器,补液便捷,大幅提高工作效率。
权利要求
1.一种高精度的多通道超磁致伸缩输液装置,其特征在于,包括:
基座,其上并列设置有多个用于安装输液器的输液器安装位,多个输液器对应安装于所述输液器安装位内;
超磁致伸缩装置,沿多个所述输液器安装位排列的方向可移动的安装于所述基座上;
控制器,与所述超磁致伸缩装置连接,用于控制所述超磁致伸缩装置的移动至需输液的所述输液器安装位处并控制所述超磁致伸缩装置伸缩推动输液器的活塞杆移动实现输液和控制输液量。
2.根据权利要求1所述的高精度的多通道超磁致伸缩输液装置,其特征在于,所述超磁致伸缩装置具有一超磁致伸缩杆和传动杆,所述控制器调控改变所述超磁致伸缩装置的电流,电流变化引起超磁致伸缩杆的磁力变化,驱动所述超磁致伸缩杆伸出或缩回,所述超磁致伸缩杆伸出推动所述传动杆移动至与所述活塞杆接触并推动所述活塞杆,实现输液。
3.根据权利要求1所述的高精度的多通道超磁致伸缩输液装置,其特征在于,包括位移传感器,安装于与所述活塞杆对应的所述输液器安装位的内侧面上,所述位移传感器与所述控制器连接,并用于测量所述活塞杆的位移数据并传输至所述控制器,所述控制器根据位移数据精准调控所述超磁致伸缩装置的伸缩位移从而调控活塞杆的位移,精准控制所述输液器的输液量和输液速度。
4.根据权利要求1所述的高精度的多通道超磁致伸缩输液装置,其特征在于,所述输液器包括输液筒和活塞杆;所述活塞杆上套设有用于实现所述活塞杆回复的第一弹簧,所述第一弹簧一端抵于所述输液筒上,另一端抵于所述活塞杆一端;输液完成后所述超磁致伸缩装置收缩,所述第一弹簧恢复带动所述活塞杆复位。
5.根据权利要求4所述的高精度的多通道超磁致伸缩输液装置,其特征在于,所述输液器安装位包括:
输液筒安装位,其中部形成用于安装所述输液筒的凹槽;
活塞杆导向安装位,用于防止所述活塞杆偏移,其朝向所述超磁致伸缩装置的一侧面上开设开孔,供所述超磁致伸缩装置伸入所述开孔内推动所述活塞杆运动。
6.根据权利要求1所述的高精度的多通道超磁致伸缩输液装置,其特征在于,超磁致伸缩装置通过滑动组件沿多个所述输液器安装位并列的方向可移动的安装于所述输液器安装位的一侧;所述滑动组件包括:
滑轨,沿垂直于所述超磁致伸缩装置伸缩的方向延伸设置;
滑块,通过丝杆可滑动的设置于所述滑轨上,所述滑块与所述超磁致伸缩装置连接;
驱动装置,与所述丝杆和所述控制器连接;所述控制器控制所述驱动装置驱动所述丝杆转动,所述丝杆转动带动所述滑块沿所述滑轨滑动。
7.根据权利要求1所述的高精度的多通道超磁致伸缩输液装置,其特征在于,还包括用于输入用户指令和反馈输液数据的终端,其与所述控制器连接,用户于所述终端上输入指令,所述控制器根据指令调控所述超磁致伸缩装置的电流,调控输液速度和输液量。
8.根据权利要求1所述的高精度的多通道超磁致伸缩输液装置,其特征在于,所述控制器上设置有用于启动输液的启动按钮,和用于紧急停止输液的急停按钮以及用于显示输液状态的显示灯。
说明书
技术领域
本实用新型属于医疗设备领域,具体涉及一种高精度的多通道超磁致伸缩输液装置。
背景技术
输液泵在医疗设备领域有着广泛使用,一般使用输液泵来驱动注射器将药液精确、微量、均匀、持续地注入人体内。操作方便、输出药液量精确,可根据病情随时调整注射速度、药量,能减轻医护人员工作量,提高工作效率,能有效地配合医护人员抢救与治疗。
为了提高输液泵的输出精度和稳定性,要求输液泵具有精密的机械结构和精确的程序控制,并且需要输液泵和输液器之间的配合精度高。但是,现有输液泵不能自动精准地反馈相关数据给医护人员,达不到精度较高的输液量。此外,在输送不同药液时,由于取下输液器需要按照固定的安装顺序进行,其安装方式比较复杂,容易发生失误,并且在自动输液的过程中需要等待一段时间,因此在紧急情况下会影响医护人员的救助效率。
实用新型内容
本实用新型为了解决背景技术中所提出的技术问题,提供了一种高精度的多通道超磁致伸缩输液装置。
本实用新型的技术方案为:
一种高精度的多通道超磁致伸缩输液装置,包括:基座,其上并列设置有多个用于安装输液器的输液器安装位,多个输液器对应安装于所述输液器安装位内;超磁致伸缩装置,沿多个所述输液器安装位排列的方向可移动的安装于所述基座上;控制器,与所述超磁致伸缩装置连接,用于控制所述超磁致伸缩装置的移动至需输液的所述输液器安装位处并控制所述超磁致伸缩装置伸缩推动输液器的活塞杆移动实现输液和控制输液量。
进一步优选的,所述超磁致伸缩装置具有一超磁致伸缩杆和传动杆,所述控制器调控改变所述超磁致伸缩装置的电流,电流变化引起超磁致伸缩杆的磁力变化,驱动所述超磁致伸缩杆伸出或缩回,所述超磁致伸缩杆伸出推动所述传动杆移动至与所述活塞杆接触并推动所述活塞杆,实现输液。
进一步优选的,包括位移传感器,安装于与所述活塞杆对应的所述输液器安装位的内侧面上,所述位移传感器与所述控制器连接,并用于测量所述活塞杆的位移数据并传输至所述控制器,所述控制器根据位移数据精准调控所述超磁致伸缩装置的伸缩位移从而调控活塞杆的位移,精准控制所述输液器的输液量和输液速度。
进一步优选的,所述输液器包括输液筒和活塞杆;所述活塞杆上套设有用于实现所述活塞杆回复的第一弹簧,所述第一弹簧一端抵于所述输液筒上,另一端抵于所述活塞杆一端;输液完成后所述超磁致伸缩装置收缩,所述第一弹簧恢复带动所述活塞杆复位。
进一步优选的,所述输液器安装位包括:输液筒安装位,其中部形成用于安装所述输液筒的凹槽;活塞杆导向安装位,用于防止所述活塞杆偏移,其朝向所述超磁致伸缩装置的一侧面上开设开孔,供所述超磁致伸缩装置伸入所述开孔内推动所述活塞杆运动。
进一步优选的,超磁致伸缩装置通过滑动组件沿多个所述输液器安装位并列的方向可移动的安装于所述输液器安装位的一侧;所述滑动组件包括:滑轨,沿垂直于所述超磁致伸缩装置伸缩的方向延伸设置;滑块,通过丝杆可滑动的设置于所述滑轨上,所述滑块与所述超磁致伸缩装置连接;驱动装置,与所述丝杆和所述控制器连接;所述控制器控制所述驱动装置驱动所述丝杆转动,所述丝杆转动带动所述滑块沿所述滑轨滑动。
进一步优选的,还包括用于输入用户指令和反馈输液数据的终端,其与所述控制器连接,用户于所述终端上输入指令,所述控制器根据指令调控所述超磁致伸缩装置的电流,调控输液速度和输液量。
进一步优选的,所述控制器上设置有用于启动输液的启动按钮,和用于紧急停止输液的急停按钮以及用于显示输液状态的显示灯。本实用新型提供了一种高精度的多通道超磁致伸缩输液装置,使其与现有技术相比具有以下的优点和积极效果:
1、本实用新型通过设置控制器和多个输液器安装位,多个输液器对应安装于输液器安装位内,同时设置沿多个输液器安装位排列的可移动的超磁致伸缩装置,通过控制器和超磁致伸缩装置、输液器的协同作用,需输液时,控制器根据用户输入的注射速度和注射药量的指令,调控超磁致伸缩装置的电流量,从而调控超磁致伸缩装置的伸缩位移,超磁致伸缩装置伸缩驱动输液器的活塞杆往复移动实现高精度调节输液速度和输液量以及自动精准的反馈相关数据给医护人员,医护人员可根据所需随时调整注射速度和输液量,减轻医护人员的工作量,大幅提高工作效率,在配合医护人员抢救方面尤为重要;
2、现有技术中输液器中药液使用完后,需拆装输液器更换有药液的输液器,输液器拆装方式复杂,且安装时需按顺序将输液器安装至对应的位置,此过程中易发生药液混淆导致输液错误,以及浪费时间影响医护人员的工作效率;本实用新型中设置多个输液器,可输送不同的药液,且当输液器中药液用完后,可将输液器的针头与外部药液存储装置连接,及时补充药液,方便快捷,无需拆卸输液器,避免失误;节省时间,避免在紧急情况下影响医护人员的救助效率,有效提高工作效率。
附图说明
结合附图,通过下文的述详细说明,可更清楚地理解本实用新型的上述及其他特征和优点,其中:
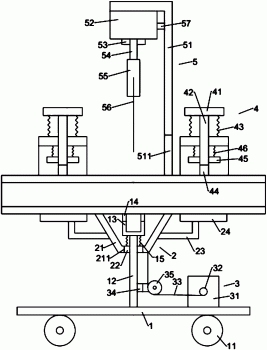
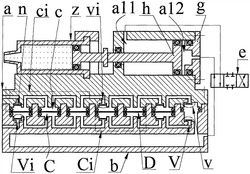
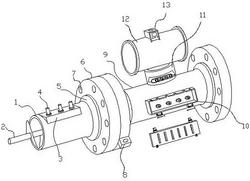
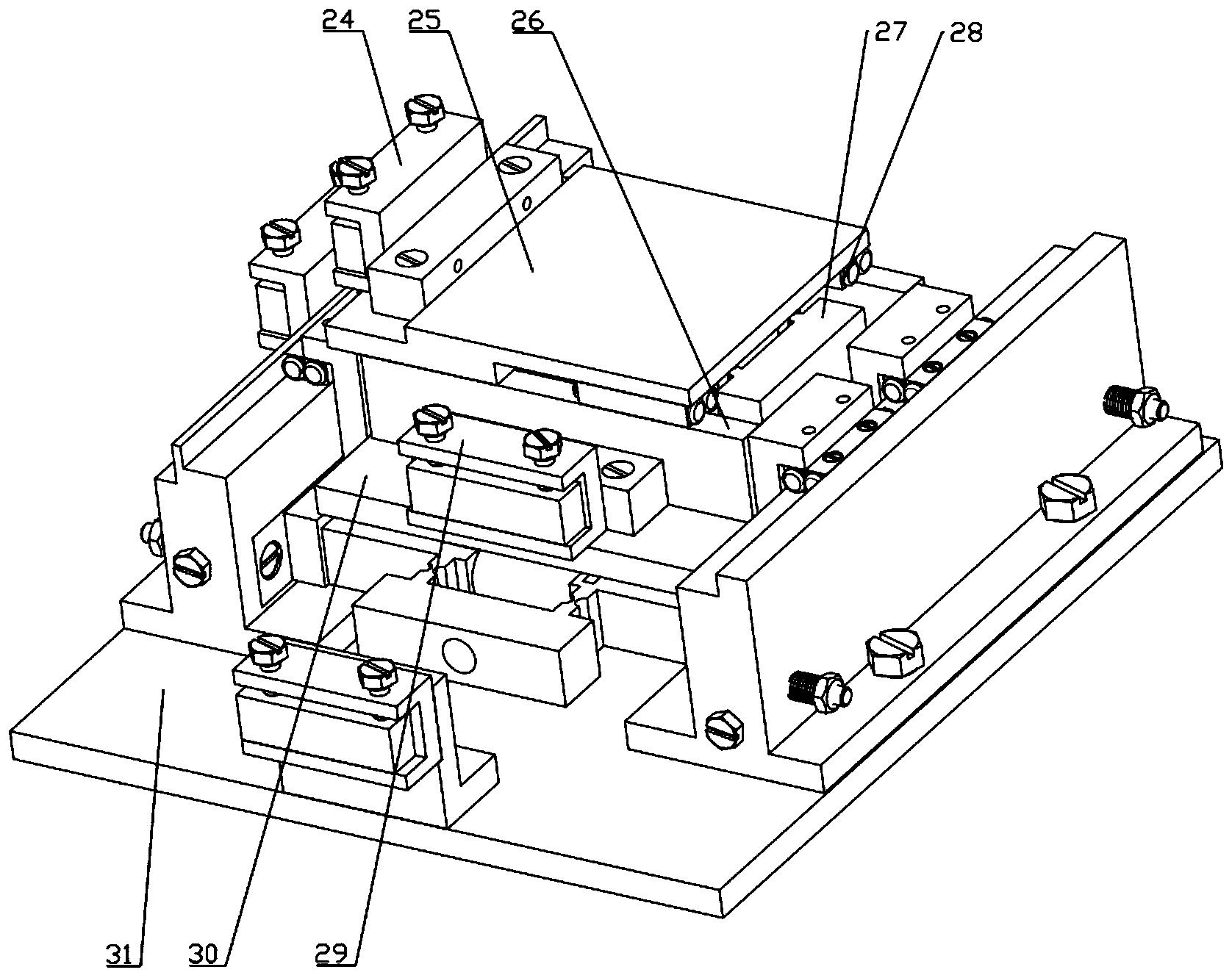
图1为本实用新型实施例1中高精度的多通道超磁致伸缩输液装置的示意图;
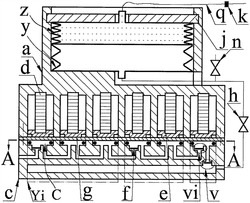
图2为本实用新型实施例1中高精度的多通道超磁致伸缩输液装置的示意图;
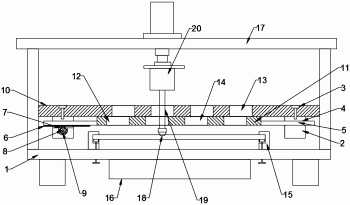
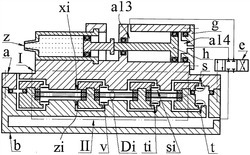
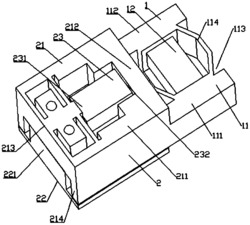
图3为本实用新型实施例1中的超磁致伸缩装置的结构示意图;
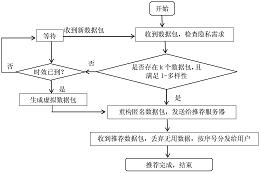
图4为本实用新型中高精度的多通道超磁致伸缩输液装置的闭环控制系统的示意图。
符号说明:
1-基座;2-超磁致伸缩装置;201-壳体;202-线圈骨架;203-励磁线圈; 204-超磁致伸缩杆;205-传动杆;206-永磁体;207-套筒;208-弹簧;3-第一弹簧;4-终端;5-输液器安装位;501-输液筒安装位;502-活塞杆导向安装位;6-输液器;601-输液筒;602-活塞杆;7-滑动组件;701-滑轨;702- 滑块;703-丝杆;8-启动按钮;9-急停按钮。
具体实施方式
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对照附图说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
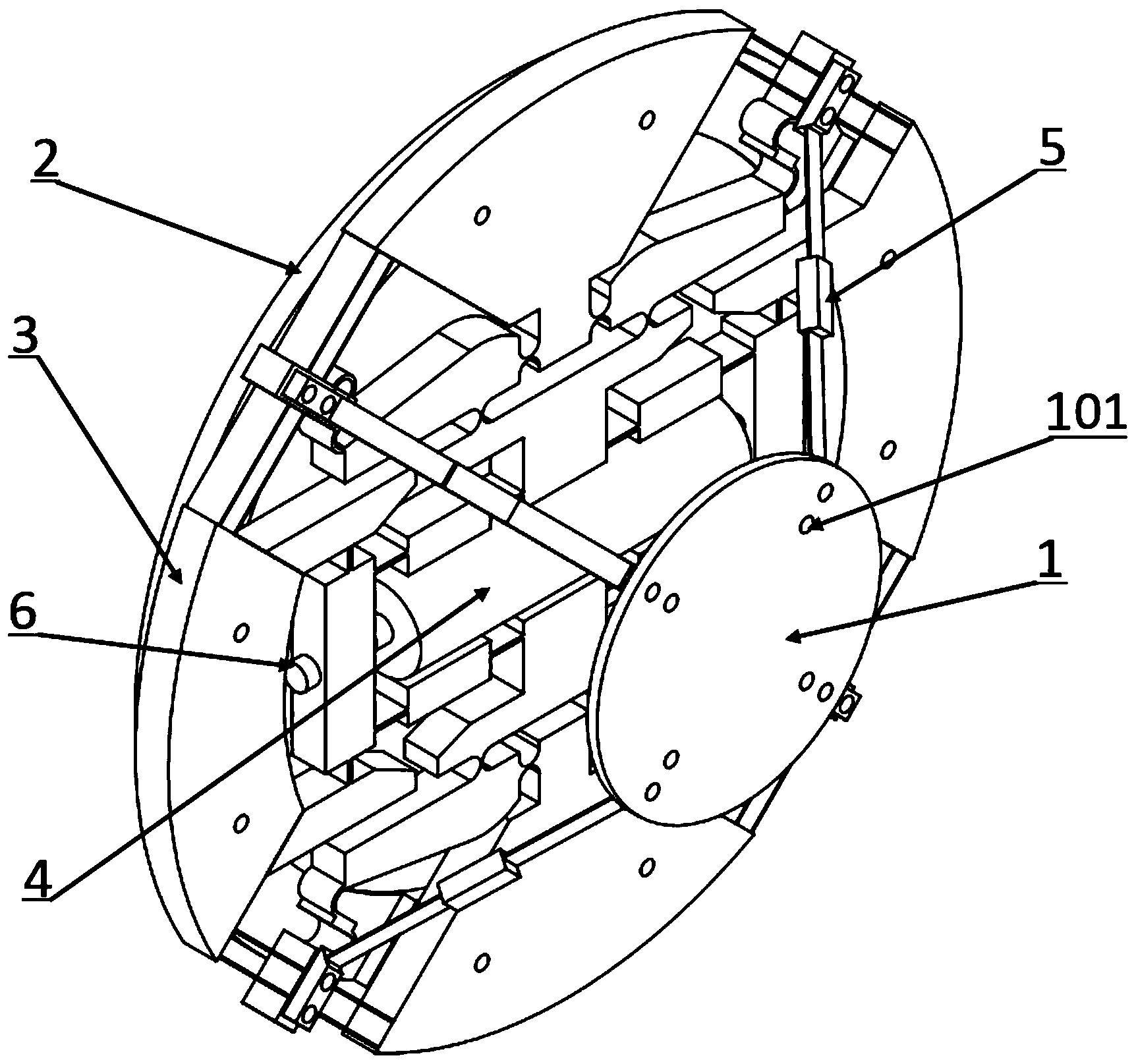
参照图1-4,本实施例提供了一种高精度的多通道超磁致伸缩输液装置,包括:基座1,其上并列设置有多个用于安装输液器6的输液器安装位5,多个输液器6对应安装于输液器安装位5内;超磁致伸缩装置2,沿多个输液器安装位5排列的方向可移动的安装于基座1上;控制器,与超磁致伸缩装置2连接,用于控制超磁致伸缩装置2的移动至需输液的输液器安装位5处并控制超磁致伸缩装置2伸缩推动输液器6的活塞杆602移动实现输液和控制输液量。
本实用新型通过控制器和超磁致伸缩装置2、输液器6的协同作用,需输液时,控制器根据用户输入的注射速度和注射药量的指令,调控超磁致伸缩装置2的电流量,从而调控超磁致伸缩装置2的伸缩位移,超磁致伸缩装置2伸缩驱动输液器6的活塞杆602往复移动实现高精度调节输液速度和输液量以及自动精准的反馈相关数据给医护人员,医护人员可根据所需随时调整注射速度和输液量,减轻医护人员的工作量,大幅提高工作效率,在配合医护人员抢救方面尤为重要。
在本实施例中,优选的控制器设置于基座1内,减小结构体积。当然在其他实施例中,对控制器设置的位置不做限制。
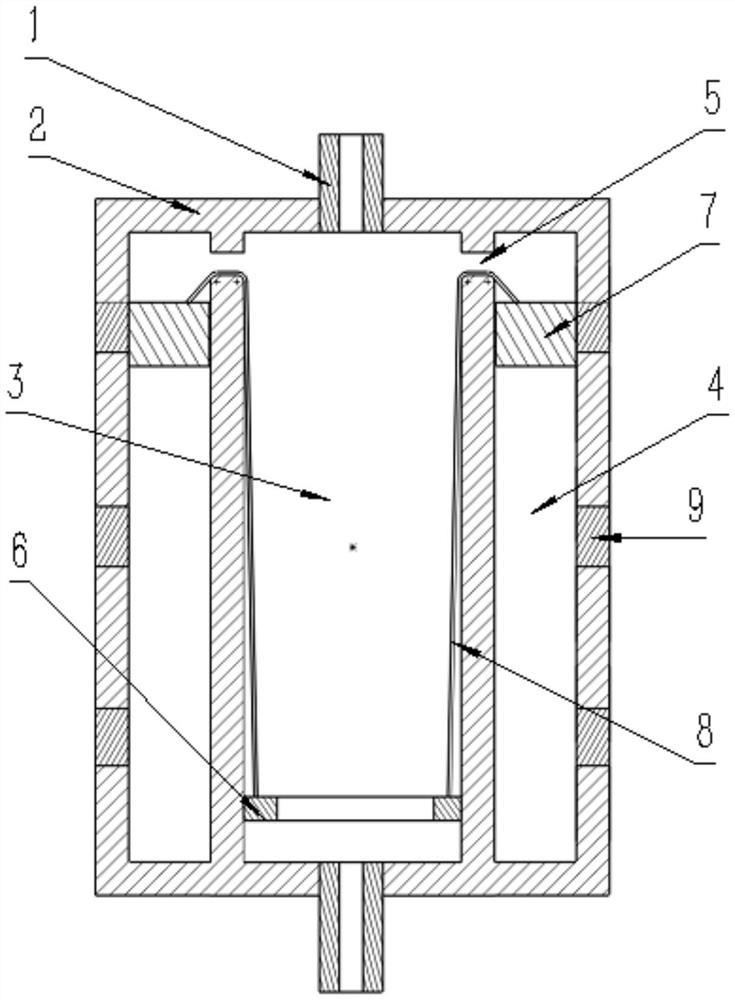
在本实施例中,参阅图3,超磁致伸缩装置2具有一超磁致伸缩杆204 和传动杆205,控制器调控改变超磁致伸缩装置2的电流,电流变化引起超磁致伸缩杆204的磁力变化,驱动超磁致伸缩杆204伸出或缩回,超磁致伸缩杆204伸出推动传动杆移动至与活塞杆602接触并推动活塞杆602,实现输液。
在本实施例中,参阅图3,超磁致伸缩装置2的具体结构包括:
壳体201,壳体201内设有线圈骨架202,线圈骨架202上环绕有励磁线圈203;
超磁致伸缩杆204,设置于励磁线圈203和线圈骨架202形成的磁场中;线圈骨架202与超磁致伸缩棒之间设有套筒207,超磁致伸缩杆204两端设置有永磁体206;
传动杆,一端与超磁致伸缩杆204的一端连接,另一端穿过壳体201端部的通孔用于推动输液器6的活塞杆602,壳体201端部与传动杆之间设置有用于驱动传动杆回复的弹簧208。
参阅图4,当需要输液时,根据用户输入控制器中的输液量和输液速度的指令,控制器将数字信号转成模拟信号,从而控制磁致线圈的电流,改变磁场的磁力,使超磁致伸缩棒伸长,从而推动传动杆前进伸出壳体201的通孔外并推动对应位置处的输液器6的活塞杆602,活塞杆602向前推进实现输液,超磁致伸缩棒的伸出的速度决定输液的速率,其伸长的长度决定输液器6的输液量;从而控制精确控制输液速度和输液量。当输液完成后,改变电流,超磁致伸缩杆204的收缩,传动杆受到弹簧208的回复力实现复位。当然在其他实施例中,超磁致伸缩装置的具体结构不局限于以上所述或图中所示。
在本实施例中,参阅图1、2,位移传感器,安装于与活塞杆602对应的输液器安装位5的内侧面上,位移传感器,安装于与活塞杆602对应的与控制器连接,并用于测量活塞杆602的位移数据并传输至控制器中,控制器根据位移数据精准调控超磁致伸缩装置2的伸缩位移从而调控活塞杆602的位移,精准控制输液器6的输液量和输液速度。在本实施例中,优选的位移传感器为激光测距传感器,其适用范围更广测量更准确且待测目标无需与传感器的换能器相垂直。当然在其他实施例中,位移传感器选用的具体类型不局限于以上所述,例如也可以是超声波传感器或光电传感器等。
在本实施例中,输液器6包括输液筒601和活塞杆602;活塞杆602上套设有用于实现活塞杆602回复的第一弹簧3,第一弹簧3一端抵于输液筒601上,另一端抵于活塞杆602一端;输液完成后超磁致伸缩装置2收缩,第一弹簧3恢复带动活塞杆602复位。
在本实施例中,输液器安装位5包括:输液筒安装位501,其中部形成用于安装输液筒601的凹槽;活塞杆导向安装位502,用于防止活塞杆偏移,其朝向超磁致伸缩装置2的一侧面上开设开孔,供超磁致伸缩装置2伸入开孔内推动活塞杆602运动。当然在其他实施例中,输液器安装位的具体结构不局限于以上所述或图中所示,例如可以是一卡槽结构,输液筒卡设于卡槽内。
在本实施例中,参阅图1、2,超磁致伸缩装置2通过滑动组件7沿多个输液器安装位5并列的方向可移动的安装于输液器安装位5的一侧;其中滑动组件7包括:滑轨701,沿垂直于超磁致伸缩装置2伸缩的方向延伸设置;滑块702,通过丝杆703可滑动的设置于滑轨701上,滑块702与超磁致伸缩装置2连接;驱动装置,与丝杆703和控制器连接,控制器控制驱动装置驱动丝杆703转动,丝杆703转动带动滑块702沿滑轨701滑动到对应的输液器安装位5处。当然在其他实施例中,滑动组件的具体结构不局限于以上所述,根据实际需求选择合适的滑动组件。
在本实施例中,高精度的多通道超磁致伸缩输液装置还包括用于输入用户指令和反馈输液数据的终端4,其与控制器连接,用户于终端4上输入指令,控制器根据指令调节超磁致伸缩装置2的电流,调控输液速度和输液量。
在本实施例中,控制器上设置有用于启动输液的启动按钮8,和用于紧急停止输液的急停按钮9以及用于显示输液状态的显示灯,当输液装置正常运行时显示等为绿色,当输液装置出现故障时显示红色,从而用户可根据显示灯及时判断输液装置的使用情况,避免出现故障导致输液失误。
以下结合本实施例的具体结构和工作原理详细阐述该高精度的多通道超磁致伸缩输液装置的详细使用过程。
用户于终端4上选择需输入的药液种类和输液速度和输液总量,控制器根据终端4输入的指令,控制驱动装置驱动丝杆703转动,丝杆703转动带动滑块702滑动至对应的输液器安装位5处,从而超磁致伸缩装置2到达与输液器6相对应的位置;开启控制器上的启动按钮8,开启输液过程,此时控制器改变超磁致伸缩装置2的电流,从而控制超磁致伸缩杆204伸缩的位移,控制输液量;达到指令中所需的输液量后,超磁致伸缩杆204停止移动或收缩至原位置。当需要向补充输液筒内的药液时,更换输液器6的针头,并将输液器针头与外部的药液储存装置连接或将输液器的针头扎入药液储存瓶中,此时超磁致伸缩杆204恢复至原位,输液器6的活塞杆602在第一弹簧的回复力的作用下,回复至原位,此时由于压力差,针头将药液储存装置中的药液吸入输液筒601内,完成药液的补充,无需拆卸更换输液器(当补充的是不同的药液时,需清洗输液器),有效提高工作效率。
上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式。即使对本实用新型作出各种变化,倘若这些变化属于本实用新型权利要求及其等同技术的范围之内,则仍落入在本实用新型的保护范围之中。
一种高精度的多通道超磁致伸缩输液装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0