






专利摘要
本发明涉及采用阵列天线估计接收信号到达方向估计技术,为只需对互相关矩阵子块进行线性运算,具有更低的计算复杂度;且实现俯仰角与方位角的自动配对。为此,本发明采用的技术方案是,基于互相关矩阵的扩展孔径二维DOA估计方法,步骤如下:1)构造互相关矩阵;2)划分互相关矩阵得到阶数为信号个数的子块;3)根据子块构建包含自动配对的方位角和俯仰角信息矩阵;4)得到z轴低精度无模糊的方向余弦估计以及对应的特征向量矩阵γ;5)得到z轴高精度模糊的方向余弦;6)重复步骤1‑5,可以得到对应x,y轴上对应的两种方向余弦;7)得到高精度无模糊的方向余弦8)得到自动配对本发明主要应用于阵列天线估计接收信号到达方向估计。
权利要求
1.一种基于互相关矩阵的扩展孔径二维DOA估计方法,其特征是,步骤如下:
1)构造互相关矩阵;
2)划分互相关矩阵得到阶数为信号个数的子块;
3)根据子块构建包含自动配对的方位角和俯仰角信息矩阵;
4)得到z轴低精度无模糊的方向余弦估计以及对应的特征向量矩阵γ;
5)得到z轴高精度模糊的方向余弦;
6)重复步骤1-5,可以得到对应x,y轴上对应的两种方向余弦;
7)得到高精度无模糊的方向余弦
8)得到自动配对
其中,互相关矩阵的构造及划分步骤:
选取子阵W构造了互相关矩阵R
其中,R
R
=E[(A
=E[A
R
由于式(6)中噪声信息互不相关且与s(t)相互独立,则式(6)简化为
R
同理,R
R
R
R
R
R
式中R
由式(7)、式(8)知,互相关矩阵的维数均为M×M,为了实现K个信号的角度估计,矩阵的阶数必须为K,A
式中
与式(9)相对应,将R
R
2.如权利要求1所述的基于互相关矩阵的扩展孔径二维DOA估计方法,其特征是,方向余弦的估计步骤:
为了从子块中得到方位角和俯仰角信息以及实现俯仰角与方位角的自动配对,根据互相关矩阵部分信息构建如下矩阵:
ψ
ψ
ψ
ψ
ψ
与以上定义不同的是ψ
根据式(11)可得
式(12)直观地给出了算法实现俯仰角和俯仰角自动配对的依据;
由式(4)和式(11)可知,ψ
通过对
ψ
P=Λ
Q=Λ
式中,Λ
由式(12)可知,定义B
式中,
同理,可得到x轴y轴低精度无模糊的方向余弦估计
3.如权利要求1所述的基于互相关矩阵的扩展孔径二维DOA估计方法,其特征是,实现角度估计的具体步骤:
利用解模糊的方法,z轴高精度无模糊的方向余弦估计为
其中,
同理,x轴,y轴高精度无模糊的方向余弦估计分别为
根据以上的分析,第k个信号的二维DOA估计表达式如下:
说明书
技术领域
本发明涉及采用阵列天线估计接收信号到达方向的技术领域,尤其涉及采用非均匀2-L型天线阵列的信号到达方向估计方法,具体讲,涉及基于互相关矩阵的扩展孔径二维DOA估计方法。
背景技术
空间信号到达方向(Direction of Arrival,DOA)估计是空间谱估计一个主要研究方向,被广泛应用在雷达、声呐、地震、通信等许多领域。DOA估计的基本问题就是确定各个信号到达阵列参考阵元的方向角,简称波达方向。经典的子空间分解类DOA估计算法有多重信号分类算法(MUSIC,Multiple Signal Classification)和基于旋转不变技术的信号参数估计算法(ESPRIT,Estimation of Signal Parameter via Rotational Invitation Techniques)。其中MUSIC算法是噪声子空间类算法,ESPRIT算法是信号子空间类算法,改进的MUSIC算法包括特征矢量法、求根MUSIC法、加权MUSIC算法等,改进的ESPRIT算法包括最小二乘ESPRIT、总体最小二乘ESPRIT、加权ESPRIT算法等。
传统的MUSIC算法和ESPRIT算法等高分辨率算法,虽然具有良好的估计性能,但是由于需要对接收信号协方差矩阵进行特征值分解,因此具有较大的计算量。传播算子算法使用线性运算使用线性运算代替了奇异值分解和特征值分解运算,显著地降低了计算复杂度。由于传播算子算法具有计算复杂度较低的优点,各国学者们对其进行了广泛研究,并提出大量基于传播算子的DOA估计算法。目前,存在大量基于传播算子的L型阵列、2-L型阵列、双平行线阵、三平行线阵等二维DOA估计算法。但是某些基于双平行线阵的传播算子算法在俯仰角为70°~90°的实际移动通信俯仰角度范围内存在角度估计失效问题,有些基于三平行线阵采用传播算子的二维DOA估计算法并没有充分利用所有的阵元信息,有些基于2-L型阵列的采用传播算子的二维DOA估计算法分别利用阵列的两个L型子阵,单独估计信号的方位角和俯仰角,估计性能较差。与基于传播算子的算法相比,基于互相关矩阵的算法能够消除高斯白噪声的影响,提高角度估计性能。另一方面,扩展孔径可以有效地提高阵列的分辨率和角度估计精度,但会出现模糊的现象。有些算法提出了解模糊的算法,但是由于算法本身是基于ESPRIT算法,因此具有较大的计算复杂度。
发明内容
为克服现有技术的不足,扩展孔径以及基于互相关矩阵的算法均能有效地提高DOA估计性能。因此,本发明旨在提出一种基于互相关矩阵的扩展孔径二维DOA估计算法。与已提出的扩展孔径DOA估计算法相比,本文提出的算法构造更低维度的互相关矩阵,只需对互相关矩阵子块进行线性运算,具有更低的计算复杂度;且实现俯仰角与方位角的自动配对。为此,本发明采用的技术方案是,基于互相关矩阵的扩展孔径二维DOA估计方法,步骤如下:
1)构造互相关矩阵;
2)划分互相关矩阵得到阶数为信号个数的子块;
3)根据子块构建包含自动配对的方位角和俯仰角信息矩阵;
4)得到z轴低精度无模糊的方向余弦估计以及对应的特征向量矩阵γ;
5)得到z轴高精度模糊的方向余弦;
6)重复步骤1-5,可以得到对应x,y轴上对应的两种方向余弦;
7)得到高精度无模糊的方向余弦
8)得到自动配对
互相关矩阵的构造及划分步骤:
选取子阵W构造了互相关矩阵Rzw,Rxw,Rpw,Ryw,Rqw,然后,选取了子阵Z,P构造了Rzp;
其中,Rzw具体构造过程如下
Rzw=E[z(t)wH(t)]
=E[(Azs(t)+nz(t))(Aws(t)+nw(t))H]
=E[Azs(t)(Aws(t))H]+E[Azs(t)nw(t)H]
+E[nz(t)(Aws(t))H]+E[nz(t)nw(t)H](6)
Rxw,Rpw,Ryw,Rqw,Rzp按照相同的方式构造;
由于式(6)中噪声信息互不相关且与s(t)相互独立,则式(6)简化为
Rzw=AzRsAwH(7)
同理,Rxw,Rpw,Ryw,Rqw,Rzp简化为:
Rxw=AxRsAwH
Rpw=ApRsAwH
Ryw=AyRsAwH
Rqw=AqRsAwH
Rzp=AzRsApH(8)
式中Rs(t)=E[s(t)s(t)H]表示s(t)的自相关矩阵,由式(8)知,互相关矩阵Rzw,Rxw,Rpw,Ryw,Rqw,Rzp均不包含噪声信息;
由式(7)、式(8)知,互相关矩阵的维数均为M×M,为了实现K个信号的角度估计,矩阵的阶数必须为K。Ax,Ay,Az,Ap,Aq,Aw分别按如下形式分块
式中 分别为维数K×K,(M-K)×K的矩阵;
与式(9)相对应,将Rzw按如下形式进行分块
Rxw,Rpw,Ryw,Rqw,Rzp按照相同的方式划分。其中,zw21,xw21,pw21,yw21,qw21均为维数(M-K)×K矩阵,pw12为维数K×(M-K)矩阵,zw11,zp11均为维数K×K矩阵,得到阶数为K的子块用于方向余弦的估计。
方向余弦的估计步骤:
为了从子块中得到方位角和俯仰角信息以及实现俯仰角与方位角的自动配对,根据互相关矩阵部分信息构建如下矩阵:
ψxz=xw21zw11-1=Ax2Az1-1
ψpz=pw21zw11-1=Ap2Az1-1
ψyz=yw21zw11-1=Ay2Az1-1
ψqz=qw21zw11-1=Aq2Az1-1
ψzz=zw21zw11-1=Az2Az1-1(11)
与以上定义不同的是ψwz=pw12Hzp11-1=Aw2Az1-1。ψzz,ψwz,ψxz,ψpz,ψyz,ψqz均为维数(M-K)×K矩阵,
根据式(11)可得
式(12)直观地给出了算法实现俯仰角和俯仰角自动配对的依据;
由式(4)和式(11)可知,ψzz,ψwz之间包含无模糊的方向余弦估计信息,则ψzz,ψwz之间的关系用如下公式表示
通过对 进行特征值分解,得到与Φz对应的特征值 以及特征向量矩阵γ,因为 则z轴低精度无模糊的方向余弦估计为:
ψzz,ψwz自身分别包含高精度模糊的方向余弦估计信息,因此,ψzz、ψwz分别取前M-K-1行构成维数为2(M-K-1)×K矩阵P,ψzz、ψwz后M-K-1行构成维数为2(M-K-1)×K矩阵Q,则P,Q用如下公式表示:
P=Λ1Az1-1
Q=Λ2Az1-1(15)
式中,Λ1、Λ2分别表示由Az2、Aw2的前M-K-1行和后M-K-1行构成的维数为2(M-K-1)×K的矩阵;
由式(12)可知,定义B1=Pγ,B2=Qγ,即实现z轴方向上低精度无模糊的方向余弦估计与高精度模糊的方向余弦估计的一一对应,则Φz的估计值 可通过B1,B2求得,即 因为 方向余弦的范围{-1≤υ≤1},通过对 进行特征值分解,则z轴高精度模糊的方向余弦估计为:
式中, 表示不小于i的最小整数, 表示不大于i的最大整数, 表示 的第k个对角元素;
同理,可得到x轴y轴低精度无模糊的方向余弦估计 以及对应高精度模糊的方向余弦估计
实现角度估计的具体步骤:
利用解模糊的方法,z轴高精度无模糊的方向余弦估计为
其中, 用下式进行估计
同理,x轴,y轴高精度无模糊的方向余弦估计分别为
根据以上的分析,第k个信号的二维DOA估计表达式如下:
本发明的特点及有益效果是:
通过构造6个维度较小矩阵,能够以较低的计算复杂度获得较好的方位角和俯仰角估计性能;扩展孔径也提高了角度估计性能;能够实现方位角和俯仰角的自动配对;在俯仰角为70°~90°的实际移动通信的俯仰角度范围内不会出现角度模糊。
附图说明:
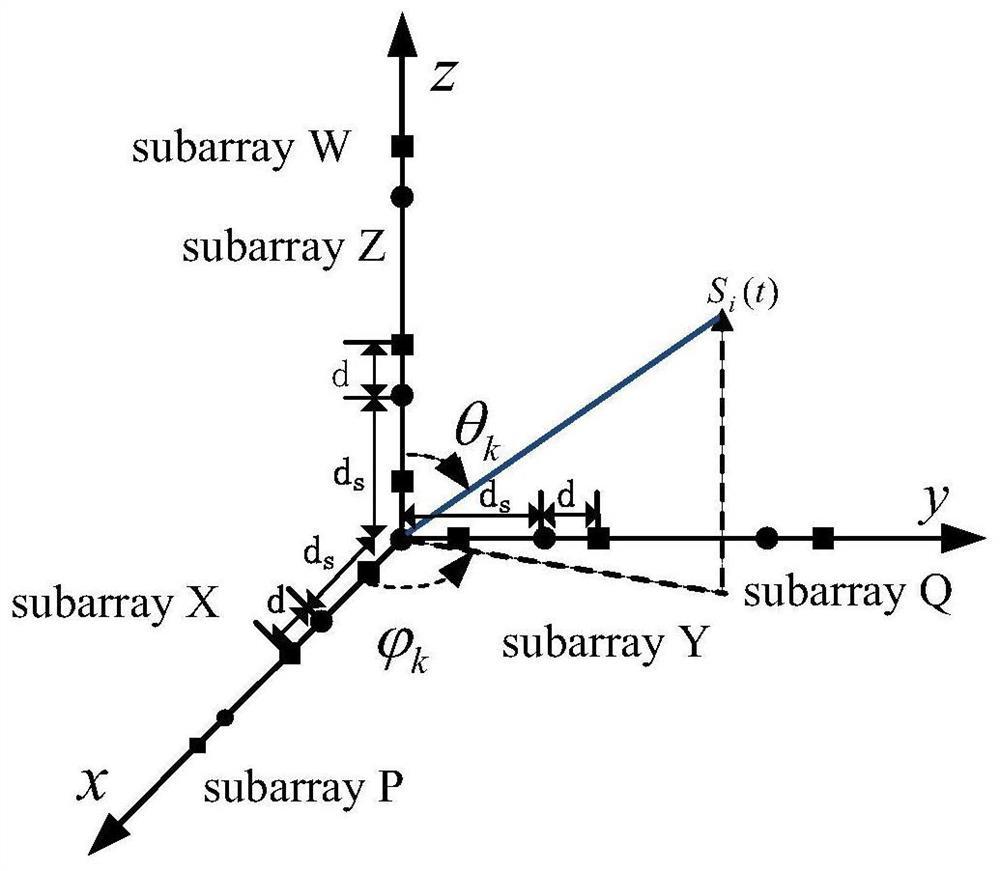
图1天线阵列结构示意图。
图2方位角估计直方图。
图3俯仰角估计直方图。
图4不同角度组合估计联合均方误差图。
图5方位角估计均方误差随信噪比变化情况。
图6俯仰角估计均方误差随信噪比变化情况。
具体实施方式
针对已有DOA估计算法存在的问题,本发明提出了一种基于非均匀2-L型阵列的扩展二维DOA估计算法,该天线阵列为非均匀2-L型阵列,其中在x轴、y轴和z轴上分别有两个阵元数目为M的均匀线阵,分别用X,Y,Z,P,Q,W表示。各子阵中阵元间距为来波信号波长的一半;各坐标轴上的两个子阵阵元间距为ds(ds=tλ,t为正整数)。
本发明采用的技术方案:基于互相关矩阵的扩展孔径二维DOA估计算法,其特征在于,包括以下步骤:
互相关矩阵的构造及划分
1)构造互相关矩阵;2)划分互相关矩阵得到阶数为信号个数的子块。
方向余弦的估计
3)根据子块构建包含自动配对的方位角和俯仰角信息矩阵;4)得到z轴低精度无模糊的方向余弦估计以及对应的特征向量矩阵γ。
角度估计的实现
5)得到z轴高精度模糊的方向余弦;6)重复步骤1-5,可以得到对应x,y轴上对应的两种方向余弦;7)得到高精度无模糊的方向余弦 8)得到自动配对
下面将结合附图和实施例对本发明做进一步的描述:
构造如图1所示的非均匀2-L型天线阵列。假设空间中有K个窄带非相关信号入射到阵列上,其中第k个信号的二维波达方向为 和θk分别为来波信号的方位角和俯仰角。
1互相关矩阵的构造及划分
我们选取子阵W构造了互相关矩阵Rzw,Rxw,Rpw,Ryw,Rqw。然后,选取了子阵Z,P构造了Rzp。
其中,Rzw具体构造过程如下
Rzw=E[z(t)wH(t)]
=E[(Azs(t)+nz(t))(Aws(t)+nw(t))H]
=E[Azs(t)(Aws(t))H]+E[Azs(t)nw(t)H]
+E[nz(t)(Aws(t))H]+E[nz(t)nw(t)H](6)
Rxw,Rpw,Ryw,Rqw,Rzp按照相同的方式构造。
由于式(6)中噪声信息互不相关且与s(t)相互独立,则式(6)可简化为
Rzw=AzRsAwH(7)
同理,Rxw,Rpw,Ryw,Rqw,Rzp可简化为:
Rxw=AxRsAwH
Rpw=ApRsAwH
Ryw=AyRsAwH
Rqw=AqRsAwH
Rzp=AzRsApH(8)
式中Rs(t)=E[s(t)s(t)H]表示s(t)的自相关矩阵。由式(8)可知,互相关矩阵Rzw,Rxw,Rpw,Ryw,Rqw,Rzp均不包含噪声信息。
由式(7)、式(8)可知,互相关矩阵的维数均为M×M。为了实现K个信号的角度估计,矩阵的阶数必须为K。Ax,Ay,Az,Ap,Aq,Aw分别按如下形式分块
式中 分别为维数K×K,(M-K)×K的矩阵。
与式(9)相对应,将Rzw按如下形式进行分块
Rxw,Rpw,Ryw,Rqw,Rzp按照相同的方式划分。其中,zw21,xw21,pw21,yw21,qw21均为维数(M-K)×K矩阵,pw12为维数K×(M-K)矩阵,zw11,zp11均为维数K×K矩阵。得到阶数为K的子块用于方向余弦的估计。
2方向余弦的估计
为了从子块中得到方位角和俯仰角信息以及实现俯仰角与方位角的自动配对,根据互相关矩阵部分信息构建如下矩阵:
ψxz=xw21zw11-1=Ax2Az1-1
ψpz=pw21zw11-1=Ap2Az1-1
ψyz=yw21zw11-1=Ay2Az1-1
ψqz=qw21zw11-1=Aq2Az1-1
ψzz=zw21zw11-1=Az2Az1-1(11)
与以上定义不同的是ψwz=pw12Hzp11-1=Aw2Az1-1。根据相应的互相关矩阵得到相应的信息矩阵ψzz,ψwz,ψxz,ψpz,ψyz,ψqz(下标表示对应的子阵)均为维数(M-K)×K矩阵。
根据式(11)可得
式(12)直观地给出了算法实现俯仰角和俯仰角自动配对的依据。
由式(4)和式(11
基于互相关矩阵的扩展孔径二维DOA估计方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0