







专利摘要
本发明介绍了一种波一种波束‑多普勒酉ESPRIT多目标角度估计方法,主要为解决多目标的波达方向(DOA)估计问题。所述方法的一具体实施方式包括:首先对目标所在距离单元数据进行时域平滑,得到平滑后的L个时域快拍数据,然后采用中心共轭对称傅里叶变换矩阵将时域快拍数据变换至波束‑多普勒域,同时保留旋转不变结构,最后采用实值酉ESPRIT算法估计目标的DOA。该实施方式充分利用了信号的时域信息来改善空域参数估计性能,精度高且计算复杂度低。
权利要求
1.一种波束-多普勒酉ESPRIT多目标角度估计方法,其特征在于,所述方法包括如下步骤:
步骤1对目标所在距离单元数据进行时域平滑,得到平滑后的L个时域快拍数据,其中,第l个时域快拍数据可表示为x
步骤2利用目标检测阶段提供的角度和多普勒频率先验信息构造指向所述目标的空时二维波束域变换矩阵;
步骤3利用所述空时二维波束域变换矩阵将平滑后的时域快拍数据x
步骤4根据所述空时二维波束域快拍数据y
步骤5对复值矩阵Φ
2.根据权利要求1所述的波束-多普勒酉ESPRIT多目标角度估计方法,其特征在于,步骤1所述的对目标所在距离单元数据进行时域平滑,得到平滑后的L个时域快拍数据,其中,第l个时域快拍数据可表示为x
假设时域子孔径的长度为M、相干累计脉冲数为K,且M<K,那么通过前向时域平滑可获得L=K-M+1个时域快拍数据,其中,第l(l=1,...,L)个时域快拍数据可以表示为:
x
式中,x
3.根据权利要求2所述的波束-多普勒酉ESPRIT多目标角度估计方法,其特征在于,步骤2所述的利用目标检测阶段提供的角度和多普勒频率先验信息构造指向所述目标的空时二维波束域变换矩阵,包括如下步骤:
3a假设波束域变换矩阵为W
表示将第n个空域波束指向空间频率μ=n(2π/N),其中,符号T表示矩阵的转置,s表示空域;
3b假设多普勒域变换矩阵为W
表示将第m个时域波束指向多普勒频率ν=m(2π/M);
3c空时二维波束域变换矩阵可表示为:
4.根据权利要求3所述的波束-多普勒酉ESPRIT多目标角度估计方法,其特征在于,步骤3所述的利用所述空时二维波束域变换矩阵将平滑后的时域快拍数据x
4a计算空时二维波束域MN×P维的导向矢量矩阵B:
式中,W
式中,B
式中,B
4b将经时域平滑后的第l个时域快拍数据x
式中,
5.根据权利要求4所述的波束-多普勒酉ESPRIT多目标角度估计方法,其特征在于,步骤4所述的根据所述空时二维波束域快拍数据y
5a求取“旋转不变性”方程:
由上式可知,b
对上式进行三角函数变换可得:
由于第n=0号波束与第n=N-1号波束对应的空间频率分别为μ
结合上述可以得到关于b
式中,Γ
5b计算空时二维波束域的旋转不变性关系:
对于P个目标来说,波束空间导向矢量矩阵具有如下旋转不变性关系:
Γ
式中,Ω
同样的,根据波束域旋转不变性,计算得到多普勒域的旋转不变性关系:
Γ
式中,Γ
结合上述和Kronecker积的性质可得空时二维波束域的旋转不变性关系为:
其中,
5c由波束-多普勒域数据即空时二维波束域快拍数据y
5d对所述实值矩阵Y进行奇异值分解可得到实值信号子空间E,理论上该信号子空间可由波束-多普勒域导向矢量矩阵B的各列张成信号子空间,即:
E=BT
式中,T为P×P维的实值非奇异矩阵;
5e将B=ET
式中,Φ
6.根据权利要求5所述的波束-多普勒酉ESPRIT多目标角度估计方法,其特征在于,步骤5所述的对复值矩阵Φ
6a通过对矩阵Φ
Φ
从特征值矩阵Ω
根据估值得到的tan(μ
6b第p个目标的入射角
式中,λ
说明书
技术领域
本发明属于雷达技术领域,涉及基于时域平滑技术的波束-多普勒域二维酉ESPRIT算法。
背景技术
波束内多目标的分辨是地基和/或机载预警雷达对主波束内多个目标进行精细跟踪时需要解决的关键问题。多目标编队飞行时很容易落入同一距离单元或相邻距离单元,仅依靠脉冲压缩技术很难从距离上对这些目标进行分离。同时,由于预警雷达的相干积累时间通常较短,仅从多普勒维对径向速度接近的目标进行分离也很困难。本发明考虑从空间维通过高精度的角度测量来分辨主瓣内的多个目标。
经典测角方法主要包括基于和差波束的比幅测角和多波束比幅测角等方法。但是,当波束内存在多个目标时,传统测角方法将失效。实际上,可采用空域超分辨技术来实现波束内多目标的分辨。经典的空域超分辨算法主要包括ML、MUSIC、ESPRIT及相应的快速算法。这些超分辨算法只利用了一维空域信息,时域脉冲通常当做快拍来使用,当信号的波达方向夹角很小时,角度估计性能会变差,尤其是在低信噪比、少快拍数时,其性能下降非常严重。实际上对于预警雷达来说,目标信号的时域信息(例如各目标多普勒频率的差异)是可以利用的。在波达方向估计中,利用信号的时域信息,本质上是将空域一维参数估计问题转化为空时二维参数估计问题,一般情况下,信源间的空间距离会增大。因此,利用信号的时域结构信息,有可能改善空域参数的估计性能,特别是小夹角时的性能。
在空时二维数据结构下,该问题本质上是单快拍多目标超分辨DOA(direction ofarrival,高分辨波达方向)估计问题。可以采用最大似然方法来联合估计目标的DOA和多普勒频率,但该方法需要进行二维参数搜索,运算量很大。通过降维最大似然方法降低运算量,将DOA和多普勒频率联合估计问题解耦成两个一维顺序优化问题,但是该方法仍然需要一维参数搜索,并且容易收敛到局部最优解。实际上,基于子空间的空域超分辨算法也可以扩展应用于空时二维参数估计,例如二维MUSIC算法,但该算法也需要二维参数搜索。针对通信系统中多载频信号DOA估计问题,目前也有一些解决的方法,如Lemma AN等人提出基于ESPRIT的角度-频率联合估计(JAFE)方法,相对于其他子空间方法,该方法避免了二维参数搜索,运算量得以降低;而基于实数运算的酉-JAFE(U-JAFE)算法,进一步降低了运算量。但传统JAFE和U-JAFE算法需要在阵元-脉冲域估计信号的协方差矩阵并且进行特征分解,运算量仍然较大(特别当脉冲数和阵元数较多时)。近年来,稀疏信号恢复技术已被广泛应用于阵列信号处理领域。虽然该技术可扩展应用于空时二维参数估计,并且在低快拍数时具有较好的参数估计性能,但需要求解一个高维的优化问题,计算量也比较大。
发明内容
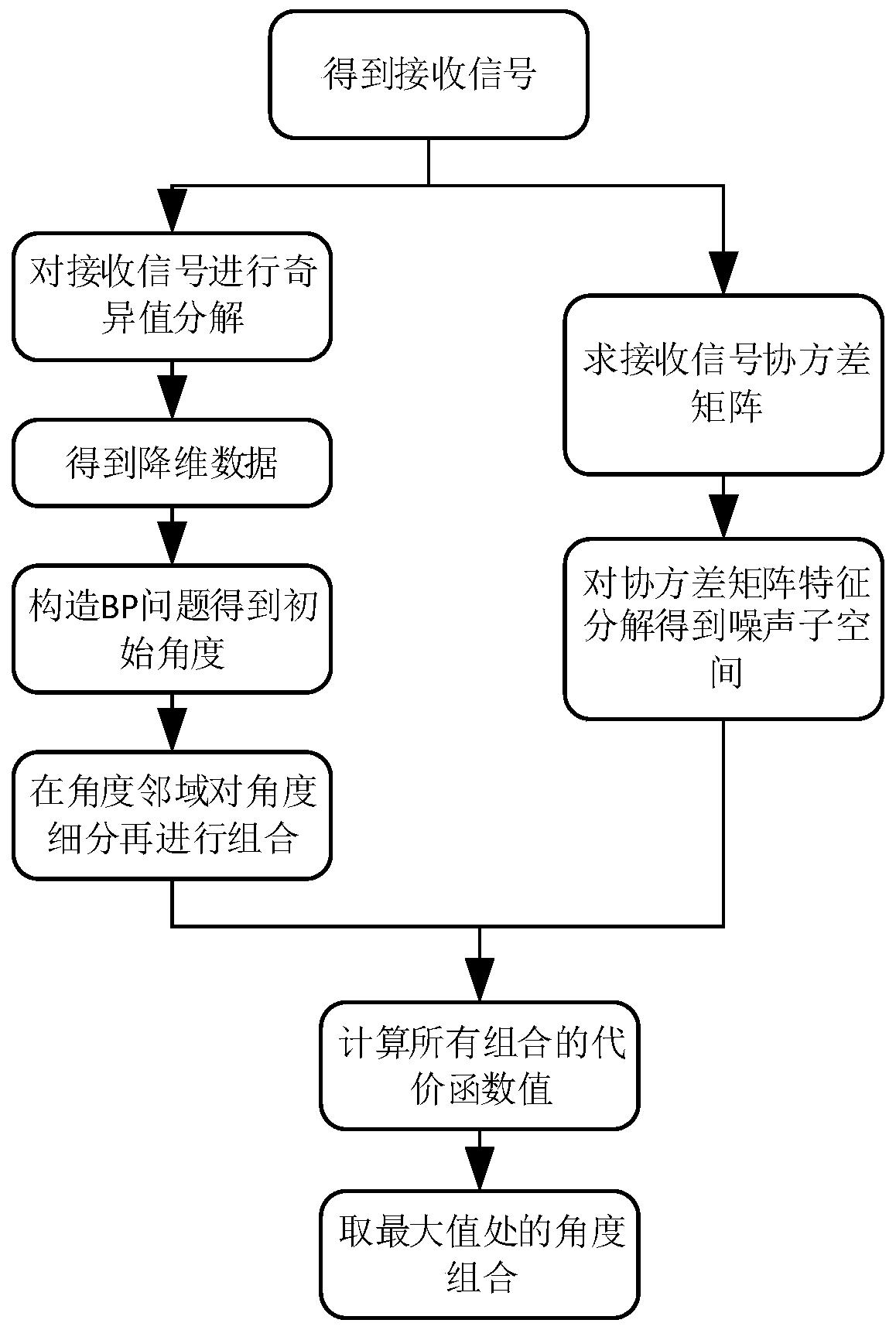
本发明的目的在于提高DOA估计精度同时兼顾运算量,在单快拍空时二维数据模型下,提出了一种基于时域平滑技术的波束-多普勒域二维酉ESPRIT算法。
实现本发明目的的技术方案是:首先通过时域平滑技术构造多个快拍数据。然采用中心共轭对称傅里叶变换矩阵将快拍数据变换至波束-多普勒域,同时保留旋转不变结构,最后采用实值酉ESPRIT算法估计目标的DOA。
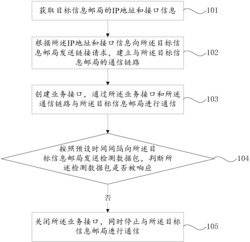
本申请提出的一种波束-多普勒酉ESPRIT多目标角度估计方法,该方法包括:步骤1对目标所在距离单元数据进行时域平滑,得到平滑后的L个时域快拍数据,其中,第l个时域快拍数据可表示为xl,l=1,...,L;步骤2利用目标检测阶段提供的角度和多普勒频率先验信息构造指向所述目标的空时二维波束域变换矩阵;步骤3利用所述空时二维波束域变换矩阵将平滑后的时域快拍数据xl变换到波束-多普勒域,得到空时二维波束域快拍数据yl,其中,l=1,...,L;步骤4根据所述空时二维波束域快拍数据yl,构造实值数据矩阵Y=[Re[y1,…,yL],Im[y1,…,yL]],并对所述实值数据矩阵Y进行奇异值分解,得到P个大奇异值对应的信号子空间E和实值矩阵Φμ、Φν;步骤5对复值矩阵Φμ+jΦν进行特征分解,并估计信号的DOA和多普勒频率。
在一些实施例中,步骤1对目标所在距离单元数据进行时域平滑,得到平滑后的L个时域快拍数据,其中,第l个时域快拍数据可表示为xl,包括:假设时域子孔径的长度为M(我们将M称为时域平滑因子)、相干累计脉冲数为K,且M<K,那么通过前向时域平滑可获得L=K-M+1个时域快拍数据,其中,第l(l=1,...,L)个时域快拍数据可以表示为:
xl=Jlx0
式中,x0为目标所在距离单元的空时快拍信号, 为第l个空时二维子孔径选择矩阵,其中,IN表示N×N维的单位矩阵,N表示接收端为由N个列子阵合成的等效均匀线阵,Jt,l=[0M×(l-1),IM,0M×(K-l-M+1)]为M×K维的时域子孔径选择矩阵,表示选择第l个时域子孔径,t表示时域,0M×(l-1)表示M×(l-1)维的零元素矩阵,该矩阵中的元素全为零,IM表示M×M维的单位矩阵,0M×(K-l-M+1)表示M×(K-l-M+1)维的零元素矩阵, 表示直积。
在一些实施例中,步骤2利用目标检测阶段提供的角度和多普勒频率先验信息构造指向所述目标的空时二维波束域变换矩阵,包括如下步骤:
3a)假设波束域变换矩阵为Ws=[ws,0,ws,1,...,ws,N-1],则Ws的第n(n=0,1,...,N-1)列为:
表示将第n个空域波束指向空间频率μ=n(2π/N),其中,符号T表示矩阵的转置,s表示空域。
3b)假设多普勒域变换矩阵为W t=[wt,0,wt,1,...,wt,M-1],则Wt的第m(m=0,1,...,M-1)列为:
表示将第m个时域波束指向多普勒频率ν=m(2π/M)。
3c)空时二维波束域变换矩阵可表示为:
在一些实施例中,步骤3利用所述空时二维波束域变换矩阵将平滑后的时域快拍数据xl变换到波束-多普勒域,得到空时二维波束域快拍数据yl,包括如下步骤:
4a)计算空时二维波束域MN×P维的导向矢量矩阵B:
式中,W
式中,Bs=[bs(μ1),bs(μ2),...,bs(μP)]为波束域导向矢量矩阵,其中,bs(μp)=[bs,0(μp),bs,1(μp),...,bs,N-1(μp)]
其中,(n=0,1,...,N-1)其中, 为ws,n的共轭转置。
式中,Bt=[bt(ν1),bt(ν2),...,bt(νP)]为多普勒域导向矢量矩阵,其中,bt(νp)=[bt,0(νp),bt,1(νp),...,bt,M-1(νp)]
其中,(m=0,1,...,M-1)其中, 为wt,m的共轭转置。
4b)将经时域平滑后的第l个时域快拍数据xl变换至波束-多普勒域,可得空时二维波束域快拍数据yl:
其中,(l=1,...,L)
式中, 为经时域平滑后第l个快拍对应的目标复幅度矢量,其中,diag{·}为向量对角矩阵化函数,s=[s1,...,sP]
在一些实施例中,步骤4根据所述空时二维波束域快拍数据yl构造实值数据矩阵Y=[Re[y1,…,yL],Im[y1,…,yL]],并对所述实值数据矩阵Y进行奇异值分解,得到P个大奇异值对应的信号子空间E和实值矩阵Φμ、Φν,包括如下步骤:
5a)求取“旋转不变性”方程:
由上式可知,bs,n+1(μp)的分子与bs,n(μp)的分子互为相反数,bs,n(μp)相当于bs(μp)=[bs,0(μp),bs,1(μp),...,bs,N-1(μp)]
对上式进行三角函数变换可得:
由于第n=0号波束与第n=N-1号波束对应的空间频率分别为μp,0=0和μp,N-1-2π=(N-1)/(2π/N)-2π=-2π/N,因此这两个波束在物理空间上是相邻的。bs(μp)的最后一个元素bs,N-1(μp)和第一个元素bs,0(μp)之间的关系为:
结合上述可以得到关于bs(μp)的N个“旋转不变性”方程,即:
式中,Γ1和Γ2为选择矩阵,其表达式如下:
5b)计算空时二维波束域的旋转不变性关系:
对于P个目标来说,波束空间导向矢量矩阵具有如下旋转不变性关系:
Γ1BsΩμ=Γ2Bs
式中,Ωμ=diag{[tan(μ1/2),tan(μ2/2),...,tan(μP/2)]
同样的,根据波束域旋转不变性,计算得到多普勒域的旋转不变性关系:
Γ3BtΩν=Γ4Bt
式中,Γ3、Γ4为选择矩阵,Γ3、Γ4与Γ1、Γ2的定义类似(需要将N替换为M),Ων=diag{[tan(ν1/2),tan(ν2/2),...,tan(νP/2)]
结合上述和Kronecker积的
一种波束-多普勒酉ESPRIT多目标角度估计方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0