








专利摘要
本发明公开了一种基于平衡轮的模块化组合方法,包括如下步骤:选取带可折叠脚踏的单轮平衡轮,在平衡轮的脚踏上开设连接孔;制作长条形踏板,长条形踏板的两端分别开设有连接孔;长条形踏板两端分别连接有2个相互平行的平衡轮,组成平衡车;制作连接装置,长条形踏板的一端连接有平衡轮,长条形踏板的另一端与连接装置的连接杆相连接,连接装置的前挡板件与另一个平衡轮相连接,组成滑板车;其中前后设置的两个平衡轮处于同一平行面上;制作箱体以及用于连接箱体和平衡车的转向组件;将2套平衡车、2套转向组件和箱体组装成无人车,其中2套平衡车前后设置。本发明以平衡轮作为基础,运用模块组合增加趣味性的同时节省一定的成本。
权利要求
1.一种基于平衡轮的模块化组合方法,其特征在于,包括如下步骤:
(1)、选取带可折叠脚踏的单轮平衡轮(1),在平衡轮的脚踏上开设连接孔;
(2)、制作长条形踏板(2),长条形踏板(2)的两端分别开设有连接孔;
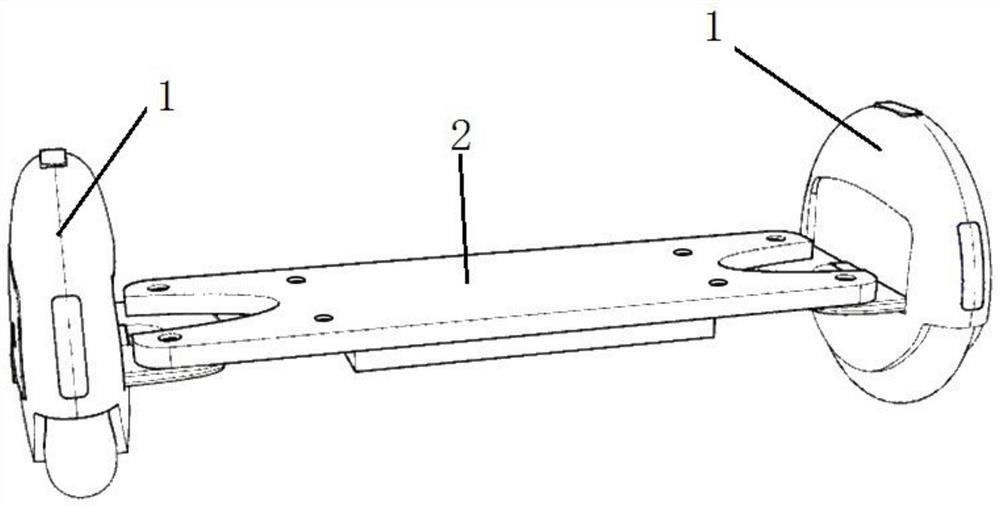
(3)、长条形踏板(2)两端分别连接有2个相互平行的平衡轮,组成平衡车;
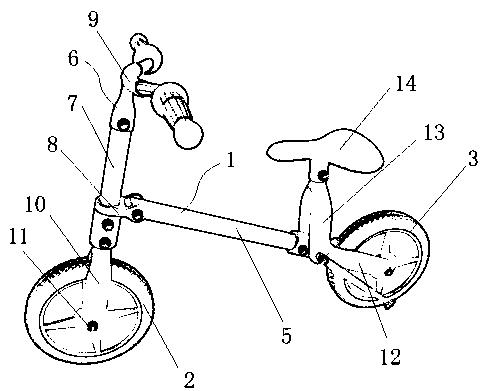
(4)、制作连接装置(3),该连接装置(3)包括与平衡轮左右踏板相连接且罩设在平衡轮上前挡板件(301)以及与前挡板件(301)可转动连接的连接杆(302);
(5)、长条形踏板(2)的一端连接有平衡轮(1),长条形踏板(2)的另一端与连接装置(3)的连接杆(302)相连接,连接装置(3)的前挡板件(301)与另一个平衡轮(1)相连接,组成滑板车;其中前后设置的两个平衡轮(1)处于同一平行面上;
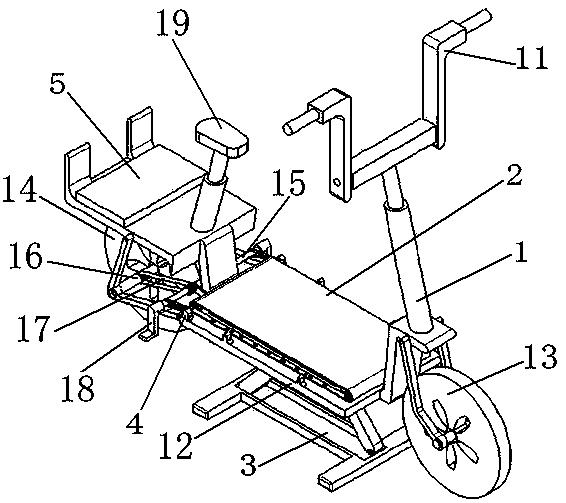
(6)、制作箱体(4)以及用于连接箱体(4)和平衡车的转向组件(5),该转向组件(5)包括与箱体(4)连接的上连接板(501)、与平衡车上长条形踏板(2)相连接的下连接板(502)、以及位于上、下连接板之间的滚动轴承(503);
(7)、将2套平衡车、2套转向组件(5)和箱体(4)组装成无人车,其中2套平衡车前后设置。
2.根据权利要求1所述的一种基于平衡轮的模块化组合方法,其特征在于:所述前挡板件(301)包括一U型板,该U型板的开口处向外折弯形成与平衡轮左右踏板相连接的折弯板,U型板的顶部设有连接套,该连接套与连接杆(302 )之间通过滚动轴承可转动连接。
3.根据权利要求1所述的一种基于平衡轮的模块化组合方法,其特征在于:所述连接杆(302)包括一L型圆杆,该L型圆杆的一端连接有开设有螺纹孔的连接板。
4.根据权利要求1所述的一种基于平衡轮的模块化组合方法,其特征在于:所述平衡轮包括平衡轮控制模块、电机、平衡轮电池模块、陀螺仪、无线通讯模块和加速度计,其中平衡轮控制模块分别与电机、陀螺仪、第一无线通讯模块和加速度计相电连接;所述长条形踏板上具有踏板控制模块和踏板电池模块,踏板控制模块分别与2个平衡轮相电连接,踏板控制模块根据平衡轮所测重心信号控制平衡轮的陀螺仪和加速度计动作。
5.根据权利要求4所述的一种基于平衡轮的模块化组合方法,其特征在于:所述箱体内设有可与外部终端实时传输的第二无线通讯模块、中央控制模块和箱体电池模块,第二无线通讯模块、中央控制模块和踏板控制模块相电连接,第二无线通讯模块收外部指令输送至中央控制模块,踏板控制模块根据中央控制模块的输出信号控制平衡轮的陀螺仪和加速度计动作;平衡轮的动作结果通过第一无线通讯模块传输至外部终端上。
6.根据权利要求1所述的一种基于平衡轮的模块化组合方法,其特征在于:所述箱体(4)包括相互适配的箱盒和箱盖。
说明书
技术领域
本发明涉及可移动车辆领域,尤其涉及一种基于平衡轮的模块化组合方法。
背景技术
随着科学技术水平的不断提高,平衡车在日常生活中也越来越常见,经常见到的是当孩子在玩平衡车的同时,这种乐趣并不能被分享,这并不利于孩子的身心健康的发展。同时,由于单一的平衡轮和平衡车本身空间的限制,并不能实现在需要的时候搭载一名同行的人,从而降低了出行效率。
随着人们生活节奏的加快,日常的购物本来就是一件放松身心的事情,但是不管是买菜还是购买商品,沉重的购物袋往往让人感到力不从心,尤其是对于已经退休的老年人来讲超市和菜市场几乎是他们经常要去的地方,传统的交通工具(如自行车、手拉车)运载东西有限,电动车对于老年人来讲危险系数较高,且都需要占用人们的双手。单一的平衡车空间有限,不能满足人们的需求。
因此,亟待解决上述问题。
发明内容
发明目的:本发明的目的是提供一种可根据不同需求组合平衡轮解决目前单轮平衡轮无法载人和载物的缺陷的一种基于平衡轮的模块化组合方法。
技术方案:为实现以上目的,本发明公开了一种基于平衡轮的模块化组合方法,其特征在于,包括如下步骤:
(1)、选取带可折叠脚踏的单轮平衡轮,在平衡轮的脚踏上开设连接孔;
(2)、制作长条形踏板,长条形踏板的两端分别开设有连接孔;
(3)、长条形踏板两端分别连接有2个相互平行的平衡轮,组成平衡车;
(4)、制作连接装置,该连接装置包括与平衡轮左右踏板相连接且罩设在平衡轮上前挡板件以及与前挡板件可转动连接的连接杆;
(5)、长条形踏板的一端连接有平衡轮,长条形踏板的另一端与连接装置的连接杆相连接,连接装置的前挡板件与另一个平衡轮相连接,组成滑板车;其中前后设置的两个平衡轮处于同一平行面上;
(6)、制作箱体以及用于连接箱体和平衡车的转向组件,该转向组件包括与箱体连接的上连接板、与平衡车上长条形踏板相连接的下连接板、以及位于上、下连接板之间的滚动轴承;
(7)、将2套平衡车、2套转向组件和箱体组装成无人车,其中2套平衡车前后设置。
其中,所述前挡板件包括一U型板,该U型板的开口处向外折弯形成与平衡轮左右踏板相连接的折弯板,U型板的顶部设有连接套,该连接套与连接杆之间通过滚动轴承可转动连接。
再者,所述连接杆包括一L型圆杆,该L型圆杆的一端连接有开设有螺纹孔的连接板。
优选的,所述平衡轮包括平衡轮控制模块、电机、平衡轮电池模块、陀螺仪、无线通讯模块和加速度计,其中平衡轮控制模块分别与电机、陀螺仪、第一无线通讯模块和加速度计相电连接;所述长条形踏板上具有踏板控制模块和踏板电池模块,踏板控制模块分别与2个平衡轮相电连接,踏板控制模块根据平衡轮所测重心信号控制平衡轮的陀螺仪和加速度计动作。
再者,所述箱体内设有可与外部终端实时传输的第二无线通讯模块、中央控制模块和箱体电池模块,第二无线通讯模块、中央控制模块和踏板控制模块相电连接,第二无线通讯模块收外部指令输送至中央控制模块,踏板控制模块根据中央控制模块的输出信号控制平衡轮的陀螺仪和加速度计动作;平衡轮的动作结果通过第一无线通讯模块传输至外部终端上。
进一步,所述箱体包括相互适配的箱盒和箱盖。
有益效果:与现有技术相比,本发明具有以下显著优点:本发明以平衡轮作为基础,运用模块组合的方式在增加趣味性的同时也可以让用户根据自己的需要来购买相应的配件同时也会节省一定的成本;组合而成的平衡车、滑板车和无人车,可实现载人载物功能,在后期使用过程当中,产品的升级和维修也可针对相应的模块进行,在产品的后期使用过程当中节约成本;不同场景中,选择不同的模块进行组合,避免了一般的平衡车或平衡轮单一的功能,为人们的日常活动带来便利;本发明与传统的单轮平衡轮相比,因增设的踏板电池模块和箱体电池模块,续航方面会有明显的增长。
附图说明
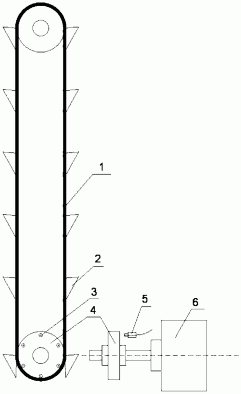
图1为本发明中单轮平衡轮的结构示意图;
图2为本发明中长条形踏板的结构示意图;
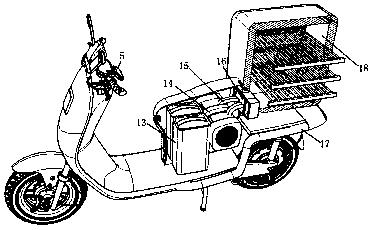
图3为本发明中箱体的结构示意图;
图4为本发明中转向组件的结构示意图;
图5为本发明中转向组件的爆炸示意图;
图6为本发明中连接装置的结构示意图;
图7为本发明中连接装置的局部示意图;
图8为本发明中平衡车的结构示意图;
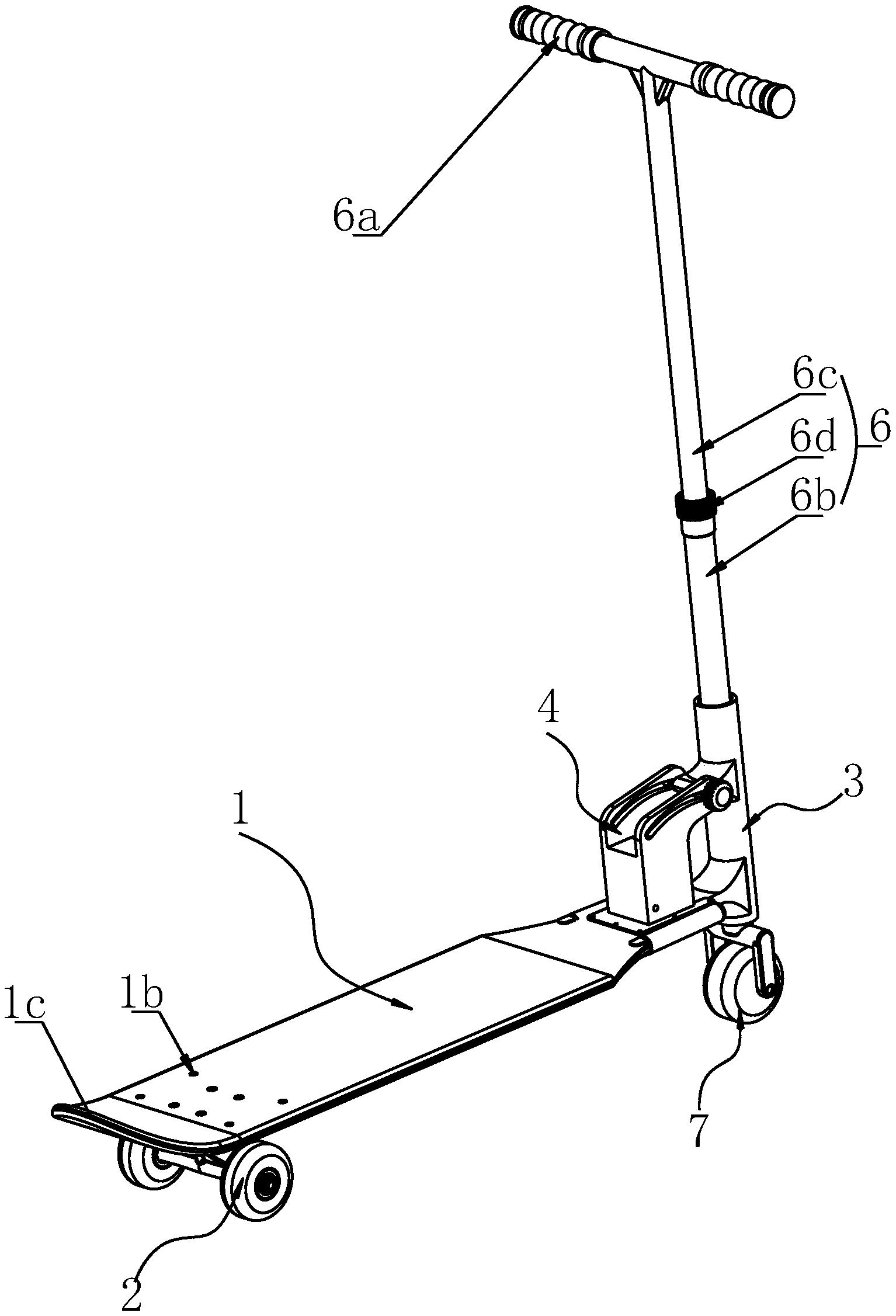
图9为本发明中滑板车的机构示意图;
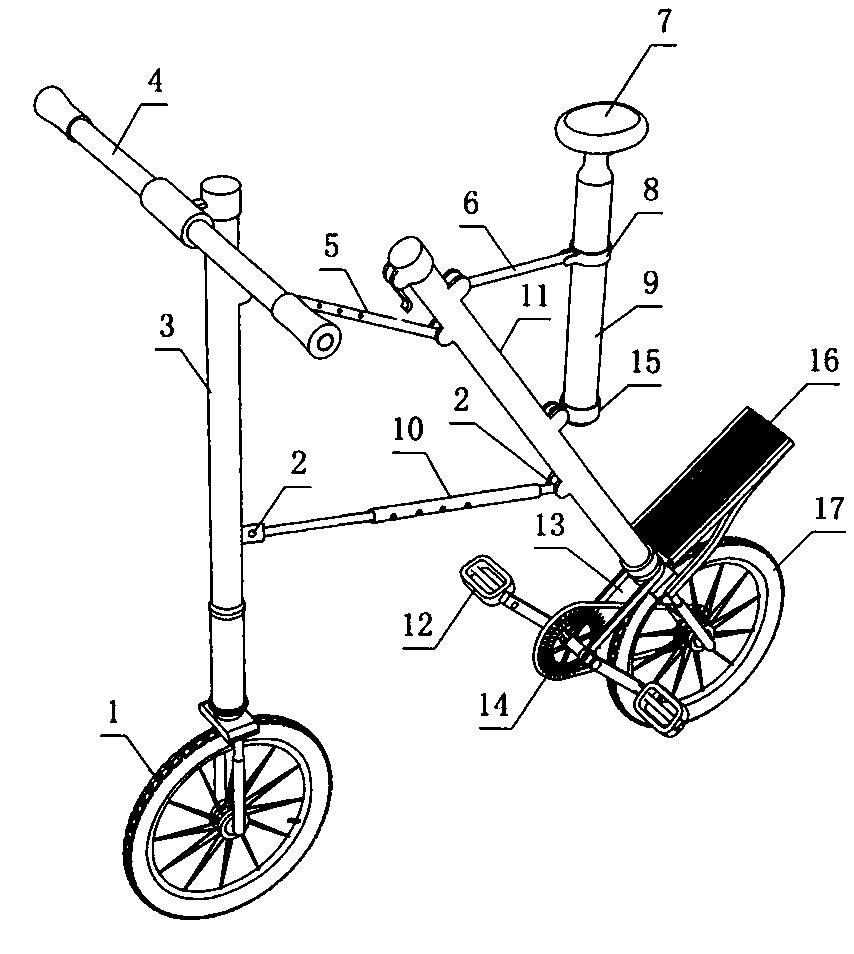
图10为本发明中无人车的结构示意图。
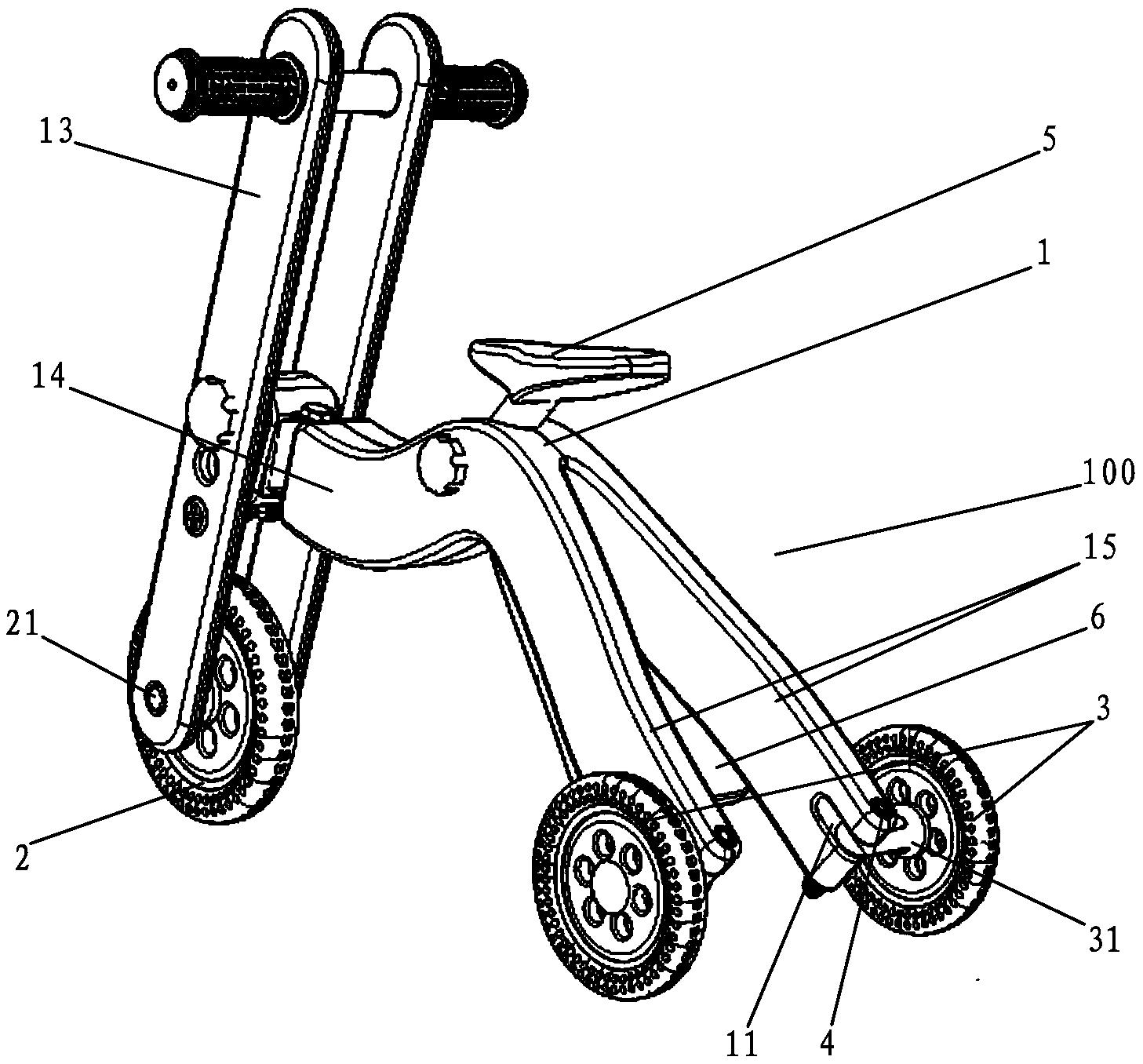
图11为本发明中无人车中转向组件的安装示意图;
图12为本发明的控制示意图。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
本发明一种基于平衡轮的模块化组合方法,包括如下步骤:
(1)、选取带可折叠脚踏的单轮平衡轮1,在平衡轮的脚踏上开设连接孔,如图1所示;
(2)、制作长条形踏板2,长条形踏板2的两端分别开设有连接孔,如图2所示;
(3)、长条形踏板2两端分别连接有2个相互平行的平衡轮,组成平衡车,如图8所示;
(4)、制作连接装置3,如图6和图7所示,该连接装置3包括与平衡轮左右踏板相连接且罩设在平衡轮上前挡板件301以及与前挡板件301可转动连接的连接杆302;前挡板件301包括一U型板,该U型板的开口处向外折弯形成与平衡轮左右踏板相连接的折弯板,U型板的顶部设有连接套,该连接套与连接杆301之间通过滚动轴承可转动连接;连接杆302包括一L型圆杆,该L型圆杆的一端连接有开设有螺纹孔的连接板;
(5)、长条形踏板2的一端连接有平衡轮1,长条形踏板2的另一端与连接装置3的连接杆302相连接,连接装置3的前挡板件301与另一个平衡轮1相连接,组成滑板车,如图9所示;其中前后设置的两个平衡轮1处于同一平行面上;
(6)、制作箱体4以及用于连接箱体4和平衡车的转向组件5,如图3所示,箱体4包括相互适配的箱盒和箱盖,如图4和图5所示,转向组件5包括与箱体4连接的上连接板501、与平衡车上长条形踏板2相连接的下连接板502、以及位于上、下连接板之间的滚动轴承503;
(7)、如图10和11所示,将2套平衡车、2套转向组件5和箱体4组装成无人车,其中2套平衡车前后设置。
如图12所示,本发明的平衡轮包括平衡轮控制模块、电机、平衡轮电池模块、陀螺仪、无线通讯模块和加速度计,其中平衡轮控制模块分别与电机、陀螺仪、第一无线通讯模块和加速度计相电连接;所述长条形踏板上具有踏板控制模块和踏板电池模块,踏板控制模块分别与2个平衡轮相电连接,踏板控制模块根据平衡轮所测重心信号控制平衡轮的陀螺仪和加速度计动作。本发明的箱体内设有可与外部终端实时传输的第二无线通讯模块、中央控制模块和箱体电池模块,第二无线通讯模块、中央控制模块和踏板控制模块相电连接,第二无线通讯模块收外部指令输送至中央控制模块,踏板控制模块根据中央控制模块的输出信号控制平衡轮的陀螺仪和加速度计动作;平衡轮的动作结果通过第一无线通讯模块传输至外部终端上。
一种基于平衡轮的模块化组合方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0