






专利摘要
本发明提供一种路面道路交通监控方法,该方法基于接近开关和多个压电片实现,所述压电片、接近开关埋设于路表,多个压电片组成压电检测单元,所述压电检测单元横跨整个车道,由垂直于道路方向的首级检测单元和次级检测单元组成。由两个检测单元采集的数据,经简单的逻辑运算后,即可获得各种交通信息,实现交通监控与管理。本发明可以加密道路信息监控网络,为交通大数据提供数据基础,极大的提高了计算流量的精度。
权利要求
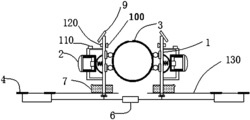
1.一种路面道路交通监控方法,该方法基于接近开关和多个压电片实现,所述压电片、接近开关埋设于路表,多个压电片组成压电检测单元,所述压电检测单元横跨整个车道,由垂直于道路方向的首级检测单元(1)和与所述首级检测单元(1)一端O点相交呈15-25°的次级检测单元(3)组成,首级检测单元(1)和次级检测单元(3)均由所述压电片排列而成;所述接近开关(2)位于车道中间位置,且与首级检测单元(1)相邻;两个检测单元中,压电片依次编号,分别为P
(1)首先,根据接近开关(2)的工作状态,对压电检测单元获得的电信号进行分段处理;
(2)车辆在经过检测单元时,碾压压电片, 被碾压的压电片即产生电信号;根据发生电信号的压电片的序号,即可获得车辆车头左右前轮压过两个检测单元的位置P
(3)测定三个长度距离
2.根据权利要求1所述的方法,其特征在于,上述方法还包括路面车辆载重的检测,方法为:在接近开关(2)的一导通阶段内,车辆所有车轮先后压过首级检测单元和次级检测单元,所述载重为车辆所有车轮先后压过首级检测单元或次级检测单元时,压电片测得的重量之和。
3.根据权利要求1所述的方法,其特征在于,上述方法还包括超载的判定,方法为:在上述接近开关(2)的同一导通阶段内,首级检测单元中任一被碾压的压电片输出的电信号的波峰个数即为车轴数;通过导通时间和速度v获得车长;通过上述获得的车轴数和车长,获得车辆的限重, 根据车辆限重和车辆的载重,检测是否超载。
4.根据权利要求1所述的方法,其特征在于,上述方法还包括车流量的检测,方法为:根据接近开关在单位时间内的导通次数,获得路面车流量;在某个周期T内,接近开关导通产生的上升沿个数为n
5.根据权利要求1所述的方法,其特征在于,上述方法还包括车头时距的检测,方法为:根据两个相邻导通阶段的上升沿之间的时间间隔,获得车头时距。
说明书
技术领域
本发明涉及一种路面道路交通监控方法。
背景技术
我国正处于基础设施建设加速时期,道路交通设施越发完善。据交通运输部统计,截至2017年7月,我国高速公路通车里程已超过13.1万公里,居世界第一位。交通基础设施极大促进了地区发展。然而,受驾驶人驾驶水平素质、地形因素决定的道路安全系数等因素的影响,道路交通安全问题形势依旧严峻:超载、超速问题依旧,而监测超载超速的检测路段密度太低,仍属于“抽查”的状态;若通过传统方式布设有线传感器,由于交通设施跨度极大的特性,将耗费大量材料,比如传输电缆和测量各种参数的各种探头,以及各种能源,比如消耗在传输线上的电能等。另外,现在的智慧交通技术逐渐发展,为了优化路网配置,对于交通大数据的需求越来越旺盛。得到详细准确的流量信息将成为道路交通监控系统的下一个重要课题。
发明内容
本发明的目的在于针对现有技术的不足,提供一种路面道路交通监控方法。
本发明的目的是通过以下技术方案实现的:一种路面道路交通监控方法,该方法基于接近开关和多个压电片实现,所述压电片、接近开关埋设于路表,多个压电片组成压电检测单元,所述压电检测单元横跨整个车道,由垂直于道路方向的首级检测单元和与所述首级检测单元一端(O点)相交呈15-25°的次级检测单元组成,首级检测单元和次级检测单元均由所述压电片排列而成。所述接近开关位于车道中间位置,且与首级检测单元相邻。两个检测单元中,压电片依次编号,分别为P1,P2···Pn,P1',P2'···Pn';检测方法如下:
(1)首先,根据接近开关的工作状态,对压电检测单元获得的电信号进行分段处理;
(2)车辆在经过检测单元时,碾压压电片。被碾压的压电片即产生电信号。根据发生电信号的压电片的序号,即可获得车辆车头左右前轮压过两个检测单元的位置PL,PR,PL',PR',以及左右前轮经过首级检测单元的时间差t1,和左右前轮经过次级检测单元的时间差t2;
(3)测定三个长度距离 结合上述得到的时间差t1、t2,即可得到车辆的速度为
进一步地,上述方法还包括路面车辆载重的检测,方法为:在接近开关的一导通阶段内,车辆所有车轮先后压过首级检测单元和次级检测单元,所述载重为车辆所有车轮先后压过首级检测单元或次级检测单元时,压电片测得的重量之和。
进一步地,上述方法还包括超载的判定,方法为:在上述接近开关的同一导通阶段内,首级检测单元中任一被碾压的压电片输出的电信号的波峰个数即为车轴数。通过导通时间和速度v获得车长;通过上述获得的车轴数和车长,获得车辆的限重。根据车辆限重和车辆的载重,检测是否超载。
进一步地,上述方法还包括车流量的检测,方法为:根据接近开关在单位时间内的导通次数,获得路面车流量。如在某个周期T内,接近开关导通产生的上升沿个数为ncar,则单位时间流量为
进一步地,上述方法还包括车头时距的检测,方法为:根据两个相邻导通阶段的上升沿之间的时间间隔,获得车头时距。
本发明的有益效果在于:本发明通过相交成15‐25°的两个压电检测单元采集数据,经简单的逻辑运算后,即可获得各种交通信息,实现交通监控与管理。由于其受限制小的特点,设备可以更加密集的布设在道路的各个路段,增强了监控可视度,进一步提升交通智能化程度,为交通大数据提供大量数据资源。与现有交通监测技术相比,利用接近开关检测车辆数,不对称压电监测阵列和接近开关相互配合,分辨出车辆类型和轴距的准确率远远高于现有单纯压电监测阵列判断方法。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1为首级检测单元1和次级检测单元3的示意图;
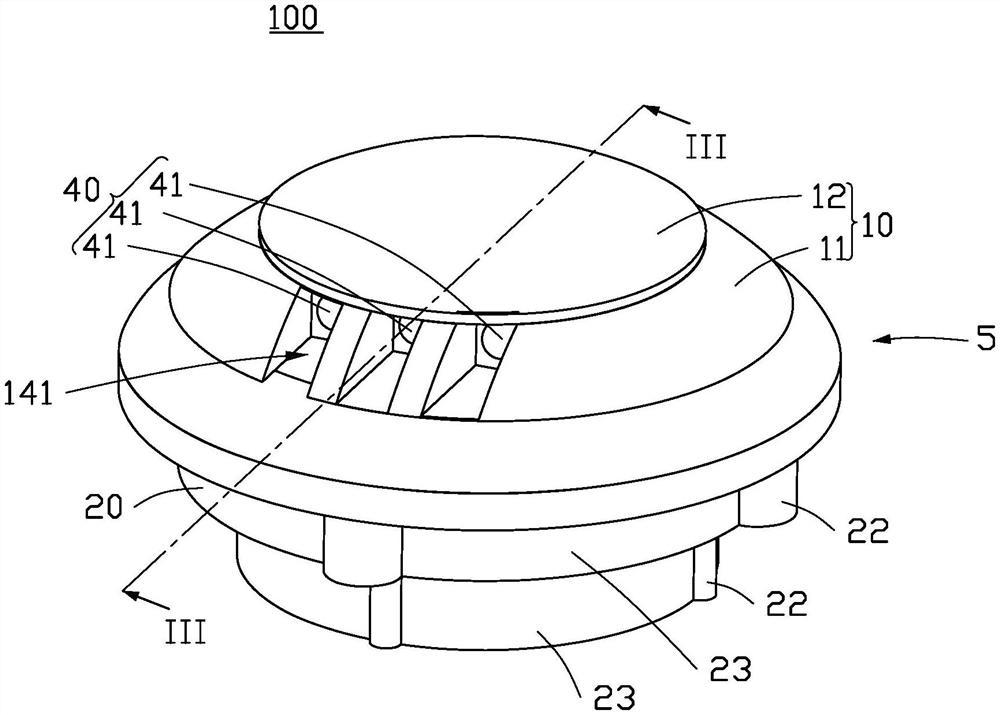
图2为本发明的立体示意图;
图3为接近开关输出波形示意图;
图4为不对称压电监测阵列输出波形示意图;
图5为车辆位置信息判断示意图;
图6为计算车辆速度的几何示意图;
图7为接近开关与不对称压电监测阵列同时输出波形实验模拟示意图;
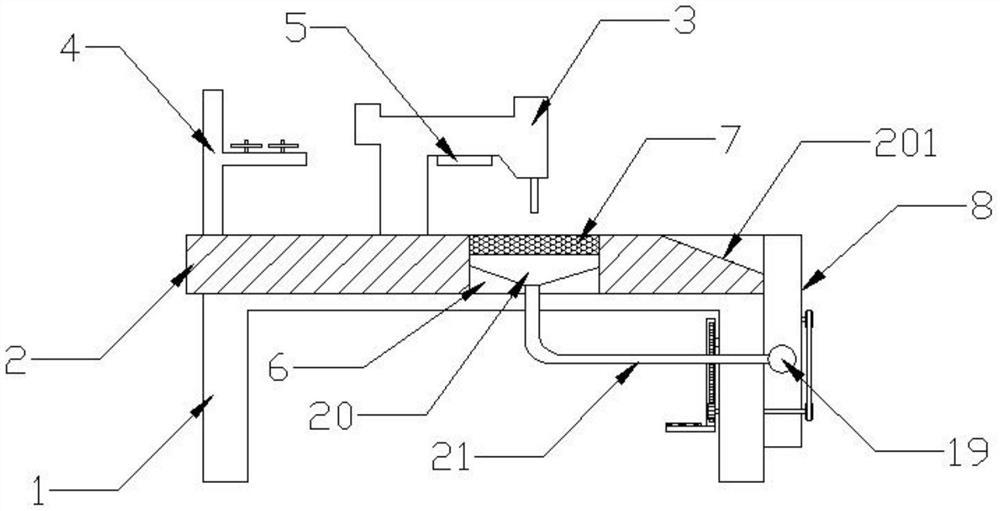
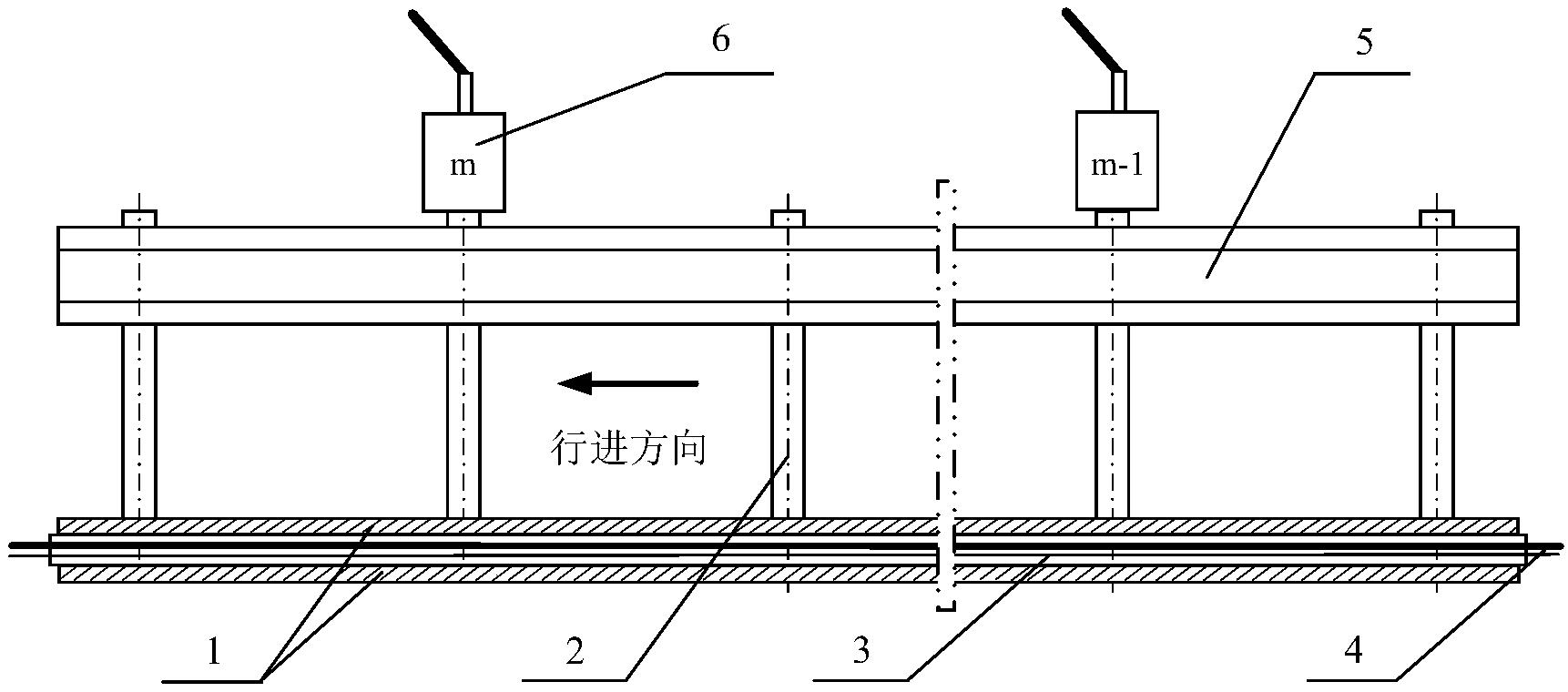
图中压电俘能单元1,接近开关2,压电监测单元3;平行粗实线表示行车道边界线,虚线表示车辆行驶轨迹,点画线仅用于标注位置。
具体实施方式
一种路面道路交通监控方法,该方法基于接近开关和多个压电片实现,所述压电片、接近开关埋设于路表,多个压电片组成压电检测单元,所述压电检测单元横跨整个车道,由垂直于道路方向的首级检测单元1和与所述首级检测单元1一端(O点)相交呈15-25°的次级检测单元3组成,首级检测单元1和次级检测单元3均由所述压电片紧密排列而成(作为本领域的公知常识,为提高精度,压电片之间紧密排列,相邻的压电片之间通过绝缘胶隔开)。所述接近开关2位于车道中间位置,且与首级检测单元1相邻。
下面结合实施例对本发明做进一步说明。
首先,确定角度为15‐25°的两条相交直线,分别用于布置首级检测单元和次级检测单元,两个检测单元中,压电片依次编号,分别为P1,P2···Pn,P1',P2'···Pn';相邻两个压电片之间的距离控制在5~10厘米之间。在车道中央布置接近开关2,且该开关与首级检测单元相邻。然后按照以下步骤操作,以检测道路情况:
(1)首先,根据接近开关的工作状态,对压电检测单元获得的电信号进行分段处理,图7显示了这一分段处理过程,表明该段监测时间范围内有两辆车通过,且第一辆车为双轴车,第二辆车为三轴车;图3单独显示了接近开关的两个导通阶段,表明在该时间段内有两辆车行驶通过该检测区域。
(2)本实施例选取第一个导通阶段进行测试,车辆在经过检测单元时,碾压压电片。被碾压的压电片即产生电信号。根据发生电信号的压电片的序号,即可获得车辆车头压过两个检测单元的位置PL,PR,PL',PR',以及左右前轮经过首级检测单元的时间差t1,和左右前轮经过次级检测单元的时间差t2;图6显示了PL, PR,PL',PR'的位置以及t1和t2时间段车辆行驶的距离。
(3)测定三个长度距离 即在实际情况中仅需要知道PR、 PL'、PR'的位置。结合上述得到的时间差t1、t2,即可得到车辆的速度为 具体计算过程如(3.1)‐(3.3)所示。
(3.1)计算左右前轮分别经过次级检测单元时,所压的压电片之间的距离
(3.2)假设首级检测单元和次级检测单元交角α,假设车辆行驶轨迹与首级检测单元的夹角β,则 其中, 图6显示了L1、 L2与夹角β的几何位置关系,以及L2、 与夹角α的几何位置关系。
(3.3)获得速度 由几何特性可知,三角形I和三角形II全等,则车辆行驶时间t1可以相等地转移至t2右侧,因此图中所示的d对应的行驶时间就是|t2-t1|,由图中的几何关系可以看出,d的计算公式为
因此 即得到 将上述得到的sinβ带入,即可得到速度公式的化简
检测路面车辆的载重方法如下:
在上述同一导通阶段内,车辆所有车轮先后压过首级检测单元和次级检测单元,所述载重为车辆所有车轮先后压过首级检测单元或次级检测单元时,压电片测得的重量之和。
本实施例中,采用现有的压电动态力传感方法将电压信号转换为力信号,获得上述车辆载重。
此外,通过本发明,还可以确定车辆的如下信息,进而可用于超载的判定:
在上述同一导通阶段内,首级检测单元中任一被碾压的压电片输出的电信号的波峰个数即为车轴数。图4中可以看出,在图3所述的第一个导通阶段内,有两个波峰,即表明该阶段内通过检测区域的车辆的车轴数为2个。
在上述同一导通阶段内,通过导通时间和速度v获得车长;
通过上述获得的车轴数和车长,获得车辆的限重。
根据车辆限重和车辆的载重,检测是否超载。
另外,通过本发明,还可以获得路面的以下信息:
根据接近开关在单位时间内的导通次数,获得路面车流量。如在某个周期T 内,接近开关导通产生的上升沿个数为ncar,则单位时间流量为
根据两个相邻导通阶段的上升沿之间的时间间隔,获得车头时距,如图3 所示,上升沿1与上升沿2间时间间隔即为相邻两辆车间的一个车头时距。
一种路面道路交通监控方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0