









专利摘要
本发明提供了一种具有防撞功能的分体式全地形多旋翼飞行器,其旋翼组件划分为纵向主旋翼和横向辅助旋翼,纵向主旋翼用于升力控制,横向辅助旋翼用于飞行方向和姿态控制,并辅助纵向主旋翼提供升力;中间连接板限制了系统滚转自由度,飞行器滚转惯性和偏航惯性较大,偏航自由度转换为整机俯仰和偏航控制可提高系统刚度,并提高控制可靠性。飞行器直流无刷电机及旋翼组件等包括在上防护罩内,摄像头驱动电机、摄像头、控制系统及电池等全部包括在下防护罩内,上防护罩、下防护罩为系统提供全方位保护。本发明飞行器不受环境限制,具有全地形飞行能力,在野外洞穴探险、着火建筑物室内巡查、化工危险品及放射性物质泄漏等危险领域具有广泛应用前景。
权利要求
1.一种具有防撞功能的分体式全地形多旋翼飞行器,其特征在于,包括:旋翼组件、中间转轴、上轴承支架、下轴承支架、摄像头驱动电机、上防护罩、中间连接板、无刷直流电机、下防护罩、摄像头;
上防护罩紧固安装在中间连接板上,旋翼组件安装在无刷直流电机上,直流无刷电机安装固定在中间连接板上,无刷直流电机和旋翼组件均位于上防护罩内部;
中间转轴通过轴承连接上轴承支架、下轴承支架,上轴承支架与中间连接板固连,下轴承支架与下防护罩固连;中间连接板、下防护罩能够分别绕中间转轴沿俯仰方向做旋转;中间转轴沿中间连接板和下防护罩直径方向配置,采用整段形式或者分段形式;
摄像头由摄像头驱动电机驱动,并与下防护罩铰接;
旋翼组件包括纵向主旋翼、横向辅助旋翼;
纵向主旋翼配置方向与中间转轴相同,主要用于飞行器升力控制;
横向辅助旋翼配置方向与纵向主旋翼方向垂直,在提供辅助升力的同时主要用于飞行方向和姿态控制;
包括控制系统,其中,所述控制系统包括:
-可充电电池和DC/DC模块,为无刷直流电机和/或无线图传模块提供驱动电压,同时通过DC/DC模块将电压转换后输出;
-MOSFET驱动电路,与单片机电路和MOSFET电路相连,将单片机电路输出的转速控制信号转换为PWM信号馈入MOSFET电路,用于驱动无刷直流电机旋转;
-MOSFET电路,与无刷直流电机相连,驱动旋翼旋转,并通过调节无刷直流电机和旋翼转速实现飞行器飞行方向和高度调节,飞行方向主要是通过横向辅助旋翼的转速调节,也就是调节中间连接板的俯仰角实现的;
-单片机电路,也就是主控制电路,接收来自无线通信模块的控制信号和惯性测量单位电路的姿态信号,转化为PWM信号馈入MOSFET驱动电路,驱动无刷直流电机和旋翼转动;同时,根据控制信号控制摄像头驱动电机旋转,实现不同方位场景的拍摄和监控;
-惯性测量单位电路,也就是姿态检测电路,安装在中间连接板上,信号馈入单片机电路后确定飞行器姿态,结合PWM控制信号实现飞行器高度和飞行路径的控制;
-无线通信模块,与地面站通信,接收来自地面站的控制信号,结合惯性测量单位电路反馈信号将控制信号转换为PWM信号驱动MOSFET电路和摄像头驱动电机,并将执行情况反馈给地面站;
-摄像头驱动电机驱动电路,电路上与单片机电路和DC/DC模块相连,在单片机电路控制下用于带动摄像头旋转;
-所述无线图传模块,电路上与DC/DC模块以及摄像头相连,用于将摄像头拍摄的图像调制后反馈入地面站或其他监视装置;
所述具有防撞功能的分体式全地形多旋翼飞行器通电后,分别沿着俯仰、滚转和偏航三轴旋转,完成惯性测量单位电路的自校准和自标定;解锁后地面站发出控制信号,无线通信模块将控制信号送入单片机电路解码,驱动纵向主旋翼和横向辅助旋翼旋转,飞行器上升至相应高度后,整体绕偏航轴旋转至设定的偏航角,两个横向辅助旋翼调整转速使中间连接板绕中间转轴旋转至相应角度,飞行器在相应高度上沿着设定的偏航角飞行;摄像头驱动电机驱动摄像头旋转,无线图传模块将摄像头拍摄的图像传回地面站;回收时,两个横向辅助旋翼调整转速使中间连接板绕中间转轴旋转至相应角度,飞行器在相应高度上沿着返航所需的偏航角飞行;至返航点后,两个横向辅助旋翼调整转速将中间连接板调平,摄像头驱动电机旋转收回摄像头,横向辅助旋翼和纵向主旋翼逐步降低转速,飞行器下降至地面,完成飞行器的回收工作。
2.根据权利要求1所述的具有防撞功能的分体式全地形多旋翼飞行器,其特征在于,中间连接板与下防护罩之间连接有弹簧。
3.根据权利要求1所述的具有防撞功能的分体式全地形多旋翼飞行器,其特征在于,摄像头能够收回到下防护罩中。
说明书
技术领域
本发明涉及智能控制和Lora通信技术,具体地,涉及具有防撞功能的分体式全地形多旋翼飞行器。尤其是涉及在野外洞穴探险、着火建筑物室内巡查、化工危险品及放射性物质泄漏等危险领域应用的具有防撞功能的分体式全地形多旋翼飞行器。
背景技术
随着微控制器、MEMS、嵌入式和无线通信技术的发展,以及APM、MWC、PPZ及MK等开源飞控的普及,旋翼飞行器成为一种重要的运动平台和载体,在航拍、农业植保、环境监测、安全保卫及地质勘探等领域日渐普及,成为智能控制等研究领域的重要内容,也成为近10年一个重要的科创和风投风口。但世面上现有的飞行器一般采用一体结构形式,旋翼暴露在机体外部,系统自由度较多,飞手需要较长的训练时间,安全性也难以保证,稍有不慎就发生划伤等意外伤害,2.4GHz频率通信距离有限,也难以在野外洞穴探险、着火建筑物室内巡查等特殊场合应用。
经对现有技术的文献检索发现,武汉大学的名称为:“一种基于四旋翼飞行器的火灾现场辅助救援系统”,公开号为CN204415739U,申请号为:CN201520046674.5的专利文献中使用2.4GHz频率的NRF24L01进行无线通信,使用轻质金属网罩住四个旋翼进行保护。浙江西科机器人技术有限公司的名称为“一种无人机消防侦察机器人”,公开号为CN206672313U,申请号为:CN201720394654.6的专利文献中采用外罩罩住飞行器,进行安全防护。瑞士联邦理工学院(洛桑)设计的GimBall和Elios飞行器采用三轴交叉的万向节结构形式,单轴共桨或两旋翼驱动形式,并将结构整体包裹在保护罩内。与本发明采用分体形式具有完全不同的结构,并且本发明也限制了中间连接板的自由度,纵向两个主电机和主旋翼主要用于升力控制,横向两个辅助电机和辅助旋翼用于飞行方向和姿态控制并辅助主电机和主旋翼提供升力,与上述专利文献和设计具有不同的结构形式和飞行控制原理。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种具有防撞功能的分体式全地形多旋翼飞行器。
根据本发明提供的一种具有防撞功能的分体式全地形多旋翼飞行器,包括:旋翼组件、中间转轴、上轴承支架、下轴承支架、摄像头驱动电机、上防护罩、中间连接板、无刷直流电机、下防护罩、摄像头;
上防护罩紧固安装在中间连接板上,旋翼组件安装在无刷直流电机上,直流无刷电机安装固定在中间连接板上,无刷直流电机和旋翼组件均位于上防护罩内部;
中间转轴通过轴承连接上轴承支架、下轴承支架,上轴承支架与间连接板固连,下轴承支架与下防护罩固连;中间连接板、下防护罩能够分别绕中间转轴沿俯仰方向做旋转;中间转轴沿中间连接板和下防护罩直径方向配置,采用整段形式或者分段形式;
摄像头由摄像头驱动电机驱动,并与下防护罩铰接。
优选地,旋翼组件包括纵向主旋翼、横向辅助旋翼;
纵向主旋翼配置方向与中间转轴相同,主要用于飞行器升力控制;
横向辅助旋翼配置方向与纵向主旋翼方向垂直,在提供辅助升力的同时主要用于飞行方向和姿态控制。
优选地,中间连接板与下防护罩之间连接有弹簧。
优选地,摄像头能够收回到下防护罩中。
优选地,包括控制系统,其中,所述控制系统包括:
-可充电电池和DC/DC模块,为无刷直流电机和/或无线图传模块提供驱动电压,同时通过DC/DC模块将电压转换后输出;
-MOSFET驱动电路,与单片机电路和MOSFET电路相连,将单片机电路输出的转速控制信号转换为PWM信号馈入MOSFET电路,用于驱动无刷直流电机旋转;
-MOSFET电路,与无刷直流电机相连,驱动旋翼旋转,并通过调节无刷直流电机和旋翼转速实现飞行器飞行方向和高度调节,飞行方向主要是通过横向辅助旋翼的转速调节,也就是调节中间连接板的俯仰角实现的;
-单片机电路,也就是主控制电路,接收来自无线通信模块的控制信号和惯性测量单位电路的姿态信号,转化为PWM信号馈入MOSFET驱动电路,驱动无刷直流电机和旋翼转动;同时,根据控制信号控制摄像头驱动电机旋转,实现不同方位场景的拍摄和监控;
-惯性测量单位电路,也就是姿态检测电路,安装在中间连接板上,信号馈入单片机电路后确定飞行器姿态,结合PWM控制信号实现飞行器高度和飞行路径的控制;
-无线通信模块,与地面站通信,接收来自地面站的控制信号,结合惯性测量单位电路反馈信号将控制信号转换为PWM信号驱动MOSFET电路和摄像头驱动电机,并将执行情况反馈给地面站;
-摄像头驱动电机驱动电路,电路上与单片机电路和DC/DC模块相连,在单片机电路控制下用于带动摄像头旋转;
-所述无线图传模块,电路上与DC/DC模块相连和摄像头相连,用于将摄像头拍摄的图像调制后反馈入地面站或其他监视装置。
与现有技术相比,本发明具有如下的有益效果:
1、本发明提供的单片机电路分别设立数字地和模拟地,并通过电感相连,模拟电源也通过LC电路提供,在使用ADC功能时可将模拟噪音降至尽可能低水平以提高系统精度和ADC稳定性。
2、本发明提供的惯性测量单位电路分别通过I2C接口和SPI接口与主控器通信,在某一接口出现故障时,主控器依然可能通过另一接口接收角速度数据或角加速度数据,避免控制软件所需的位姿参数的丢失或同时失效,从而提高系统的可靠性。
3、本发明提供的无线通信模块以较低窄带Mhz频率与飞行器通信,相同功率条件下提高通信距离至2-3Km。并以5.8GHz实现视频回传,尽可能避免了信号之间的相互干扰和影响。
4、本发明提供的机械分体结构形式,中间连接板限制了滚转自由度,偏航自由度转换为整机的俯仰和航向控制。旋翼也划分为纵向主旋翼和横向辅助旋翼,纵向主旋翼主要用于升力控制,横向辅助旋翼用于飞行方向和姿态控制并辅助主旋翼提供升力,增加了飞行器滚转惯性和偏航惯性,从而提高系统刚度和飞控可靠性。
5、本发明提供的MOSFET驱动电路通过高速光耦与主控器相连,引脚以“灌电流”方式工作,可降低对引脚驱动电流的需求,实现驱动和控制的隔离。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
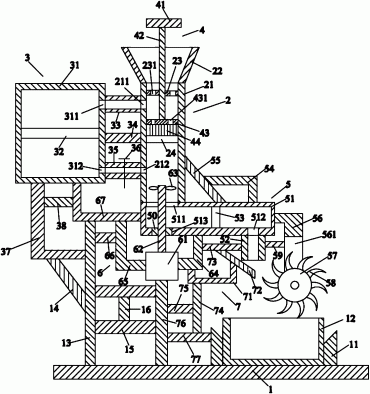
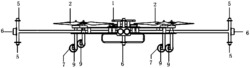
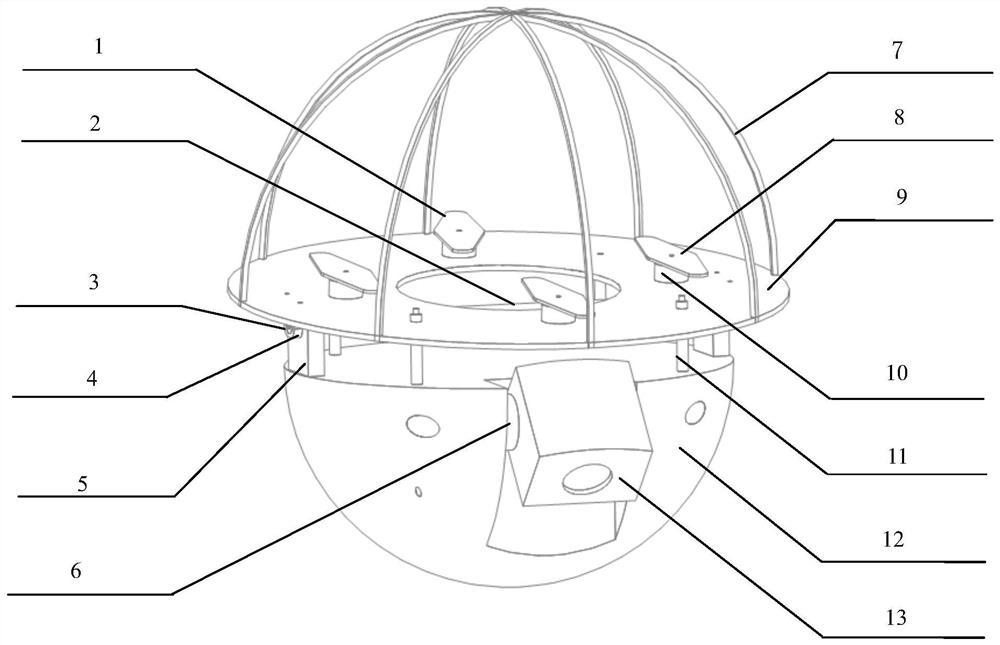
图1为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的机械结构图;
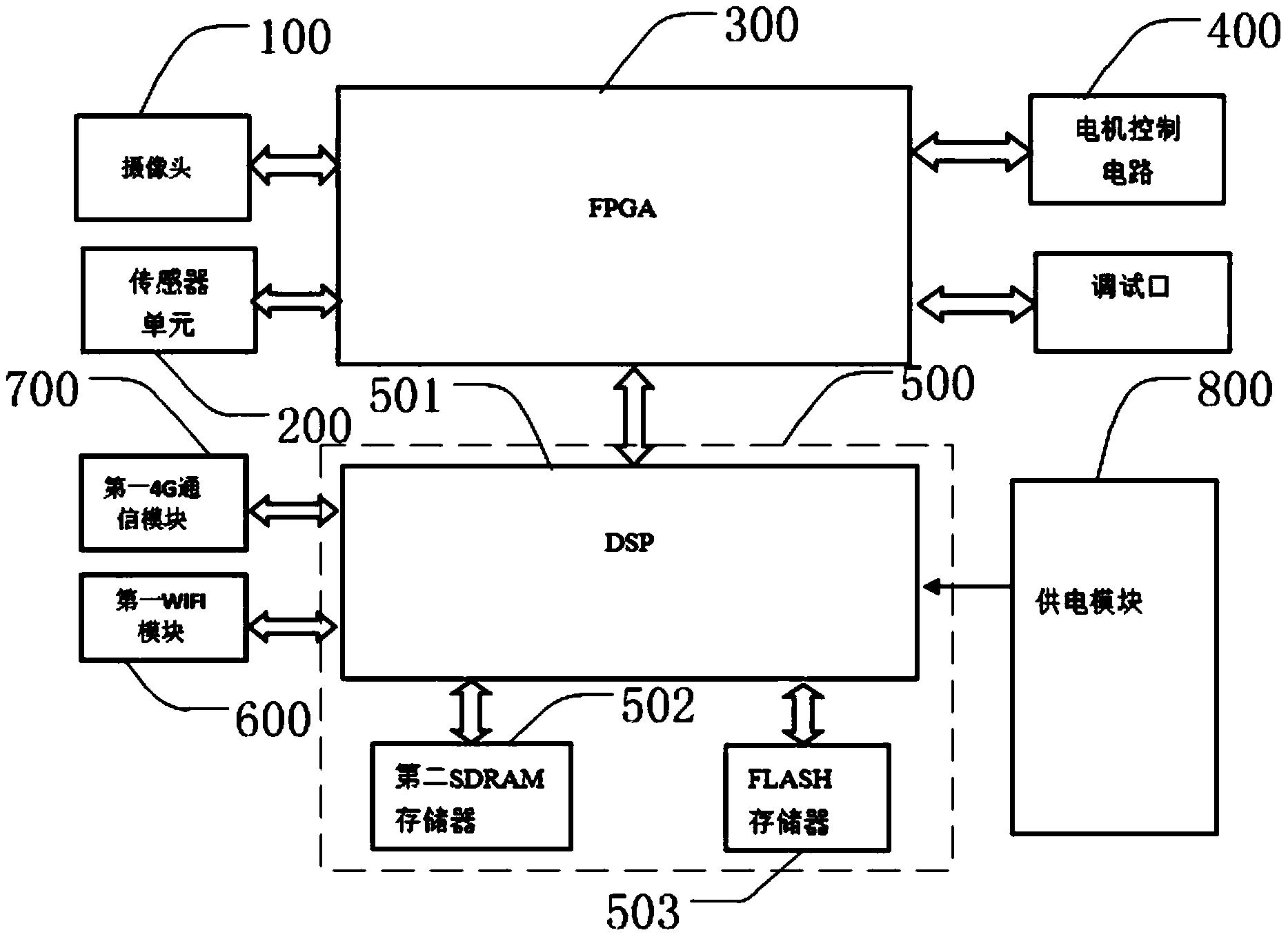
图2为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的控制系统结构图;
图3为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的单片机电路示意图;
图4为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的惯性测量单位电路示意图;
图5为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的远程无线通信模块电路示意图;
图6为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的MOSFET驱动电路示意图;
图7为本发明提供的具有防撞功能的分体式全地形多旋翼飞行器的摄像头驱动电机驱动电路示意图。
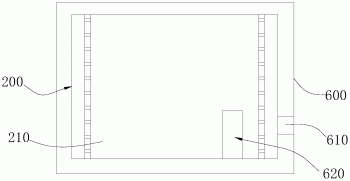
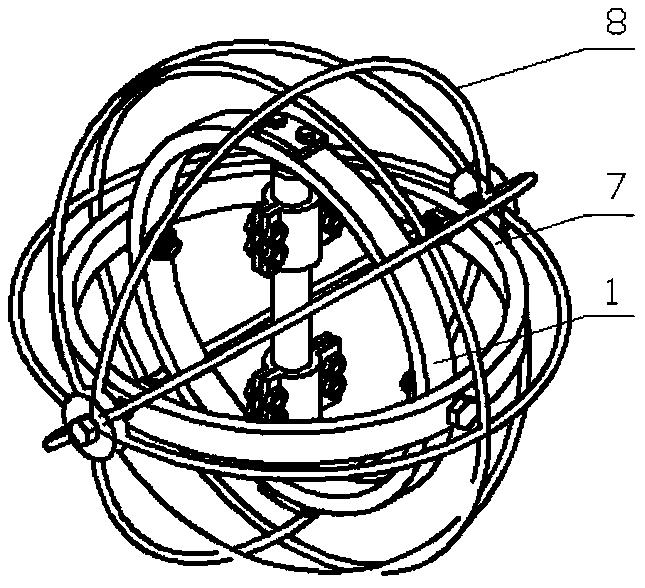
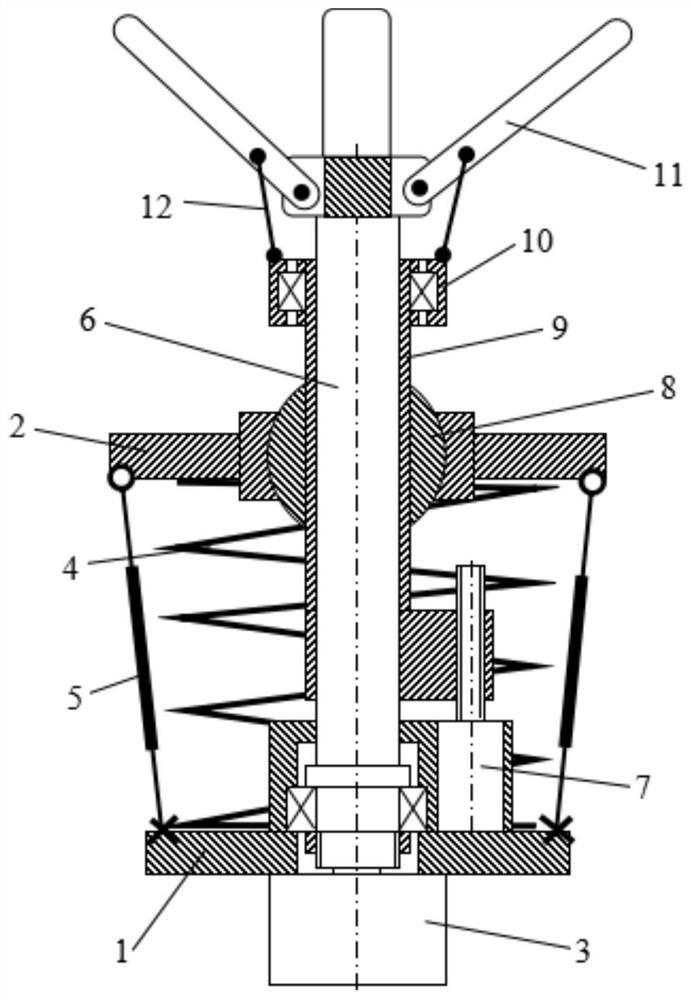
图8为本发明的结构示意图。
图中示出:
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
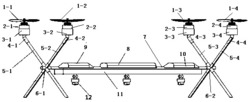
如图1所示,本发明提供了一种具有防撞功能的分体式全地形多旋翼飞行器,包括:旋翼组件、中间转轴、轴承、上轴承支架、下轴承支架、摄像头驱动电机、上防护罩、中间连接板、无刷直流电机(Brushless Direct Current Motor,BLDCM)、弹簧、下防护罩、摄像头及控制系统等。无刷直流电机、上防护罩紧固安装在中间连接板上,旋翼组件安装在无刷直流电机上,直流无刷电机安装固定在中间连接板上。无刷直流电机和旋翼组件均位于上防护罩内部。中间转轴通过轴承连接上轴承支架、下轴承支架,上轴承支架与间连接板固连,下轴承支架与下防护罩固连。中间连接板与上防护罩固连后可与下防护罩分别绕中间转轴沿俯仰方向做一定角度的旋转。中间转轴沿中间连接板和下防护罩直径方向配置,可采用整段形式也可采用分段形式。中间转轴通过上、下轴承支架和轴承连接上防护罩、上防护罩及下防护罩,也构成飞行器俯仰转轴,从而限制了系统滚转及偏航自由度。如图8所示。摄像头由摄像头驱动电机驱动,并通过转轴与下防护罩相连,在必要时可收回下防护罩内。旋翼组件包括纵向主旋翼、横向辅助旋翼。纵向主旋翼配置方向与中间转轴相同,主要用于飞行器升力控制。横向辅助旋翼配置方向与纵向主旋翼方向垂直,在提供辅助升力的同时主要用于飞行方向和姿态控制,这是与一般多轴旋翼飞行器最大的不同,也是其特色所在。
在工作时,摄像头可外向旋转并把拍摄的图像传回后面的监视器。控制板、接收机及可充电电池等附件固定在下防护罩内。中间连接板与下防护罩中间连接有多根弹簧或弹性装置,以确保飞行器工作时的姿态稳定性。
具有防撞功能的全地形多旋翼飞行器具有如下特点:
1)摄像头可回缩在下防护罩内,高速旋转的旋翼安装在上防护罩内,可避免工作时旋翼与外界物体的碰撞,使得飞行器可以高安全性和可靠性在丛林、复杂环境建筑物内等飞行;
2)与一般旋翼飞行器的最大不同,旋翼划分为纵向主旋翼和横向辅助旋翼,两个纵向主旋翼主要用于升力控制,两个横向辅助旋翼主要用于飞行方向和姿态控制,并辅助主电机和主旋翼提供升力;
3)增加了一个中间转轴,限制了飞行器滚转自由度,飞行器滚转惯性和偏航惯性较大,偏航自由度转换为整机旋转和偏航控制可提高系统刚度,提高控制可靠性。
4)远程无线通信模块以较低窄带Mhz频率与飞行器通信,相同功率条件下通信距离可达2-3Km。以5.8GHz实现视频回传,尽可能避免了信号之间的相互干扰和影响。
上述第2)、3)以及4)点是也是其最大特点和有点所在,在保护旋翼和摄像头等同时也简化了系统结构和控制方式,也最大程度上提供了飞行安全保证。本发明飞行器不受环境限制,具有全地形飞行能力,在野外洞穴探险、着火建筑物室内巡查、化工危险品及放射性物质泄漏等危险领域具有广泛应用前景。
具体地,如图2所示,控制系统包括:可充电电池a、DC/DC模块b、MOSFET驱动电路d、MOSFET电路e、单片机电路f、惯性测量单位(Inertial Measurement Unit,IMU)电路g、无线通信模块h、摄像头驱动电机驱动电路i、摄像头j、无线图传模块k;
可充电电池a和DC/DC模块b为无刷直流电机c、MOSFET驱动电路d、MOSFET电路e、单片机电路f、惯性测量单位电路g、无线通信模块h、摄像头驱动电机驱动电路i、摄像头j及无线图传模块k提供所需工作电压和电流;MOSFET驱动电路d用于驱动MOSFET电路e,MOSFET电路e驱动无刷直流电机c带动旋翼组件旋转提供所需升力;单片机电路f通过无线通信模块h接收来自地面的遥控控制信号,用于驱动MOSFET驱动电路d、MOSFET电路e、无刷直流电机c及摄像头驱动电机驱动电路i;惯性测量单位电路g用于为单片机电路f提供飞行器的参数信息,所述参数信息包括飞行姿态信息;摄像头驱动电机驱动电路i用于驱动摄像头j做俯仰方向的姿态调节和控制;无线图传电路k与摄像头j相连,用于将摄像头j拍摄的图像实时传回地面站。
当本发明提供的具有防撞功能的分体式全地形多旋翼飞行器通电后,分别沿着俯仰、滚转和偏航三轴旋转,完成惯性测量单位电路的自校准和自标定。解锁后地面站发出控制信号,无线通信模块将控制信号送入单片机电路解码,驱动纵向主旋翼和横向辅助旋翼旋转,飞行器上升至相应高度后,整体绕偏航轴旋转之设定的偏航角,两个横向辅助旋翼调整转速使中间连接板绕中间转轴旋转至相应角度,飞行器在相应高度上沿着设定的偏航角飞行。摄像头驱动电机驱动摄像头旋转,图像图传模块将摄像拍摄的图像传回地面站。回收时,两个横向辅助旋翼将中间连接板调平,飞行器绕偏航轴旋转至返航时需要的偏航角,两个横向辅助旋翼调整转速使中间连接板绕中间转轴旋转至相应角度,飞行器在相应高度上沿着返航所需的偏航角飞行。至返航点后,两个横向辅助旋翼调整转速将中间连接板调平,摄像头驱动电机旋转收回摄像头,横向辅助旋翼和纵向主旋翼逐步降低转速,飞行器下降至地面,完成飞行器的回收工作。
如图3所示,所述单片机电路f包括:主控器U0、ICE接口J1、电感L1-L2、电容C1-C4、电阻R1、二极管D1和按键开关SW1。其中,ICE接口J1引脚1、引脚3、引脚5、引脚7、引脚9空置,引脚2接V5电源,引脚10接数字地,引脚4与主控器U0引脚31相连,引脚6与主控器U0引脚30相连,引脚8与主控器U0引脚4相连,构成主控器U0ICE编程电路。主控器U0引脚41接V5电源,并经电容C3去耦至数字地。主控器U0引脚42经电感L1上拉至V5电源,再经电容C4去耦至模拟地。电感L1和电容C4构成精密滤波电路。主控器U0引脚18经电容C2接数字地。主控器U0引脚6接模拟地,引脚17接数字地,数字地与模拟地经电感L2相连。主控器U0引脚4经电阻R1和二极管D1上拉至V5电源,再经电容C1和按键开关SW1接数字地。其中,主控器U0引脚4分别与电容C1正端和二极管正端相连。二极管D1、电阻R1、电容C1和按键开关SW1构成主控器U0上电复位和手动复位回路。运行时,主控器U0采用片上内置晶振。所述主控器U0,采用Nuvoton公司M0516Cortex-M0ARM芯片。工作参数:工作电压+2.5~5.5V,最高运行频率50MHz,工作温度-40~85℃,内嵌8-64k的flash存储器,4k数据存储器,4k ISP Flash存储器,4k SRAM存储器。所述二极管D1,采用IN4007二极管。工作参数:最大允许反向电压1000V,最大正向允许电流1.0A。
如图4所示,所述惯性测量单位电路g包括:电子罗盘芯片U2、三轴陀螺芯片U3、气压计芯片U4,电阻R2-R3,电容C5-C13。
电子罗盘芯片U2引脚1和引脚14接V3.3电源,并经电容C5和C6去耦至数字地,引脚2经电阻R2上拉至V3.3电源并与单片机电路主控器U0引脚28相连,引脚3经电阻R3上拉至V3.3电源并与单片机电路主控器U0引脚29相连,引脚6经电容C8接数字地。引脚12经电容C7接引脚13。引脚10和引脚11接数字地。引脚9与单片机电路主控器U0引脚48相连。
电子罗盘芯片U2通过I2C接口与单片机电路主控器U0通信。三轴陀螺芯片U3引脚1、引脚15和引脚16接V3.3电源,并经电容C9、电容10去耦至数字地,引脚14经电容C11接数字地。引脚9-引脚13接数字地。引脚2与单片机电路主控器U0引脚3相连,引脚3与单片机电路主控器U0引脚1相连,引脚4与单片机电路主控器U0引脚2相连,引脚5与单片机电路主控器U0引脚47相连,引脚6与单片机电路主控器U0引脚46相连,引脚8与单片机电路主控器U0引脚44相连。三轴陀螺芯片U3通过SPI接口与单片机电路主控器U0通信。
气压计芯片U4引脚1及引脚10接V3.3电源,并经电容C12和C13去耦至数字地,引脚3、引脚8及引脚9接数字地。引脚2与单片机电路主控器U0引脚3相连,引脚4与单片机电路主控器U0引脚1相连,引脚5与单片机电路主控器U0引脚2相连,引脚6与单片机电路主控器U0引脚14相连,引脚7与单片机电路主控器U0引脚45相连。电子罗盘芯片U2、三轴陀螺芯片U3及气压计芯片U4构成数字惯性测量单位电路,通过I2C接口和SPI接口与主控器U0通信,为系统提供所需的位姿和高度信号。
所述的电子罗盘芯片U2,采用ST公司LSM303芯片。工作参数:3轴加速度计及3轴磁阻传感器,工作电压2.16~3.6V,磁场测量范围±1.3~8.1Gauss,全线性加速度测量范围±2/±4/±8/±16g,16位数据输出,I2C接口。
所述的三轴陀螺芯片U3,采用ST公司L3GD20芯片。工作参数:3轴角速度传感器,工作电压2.2~3.6V,全测量范围±245/±500/±2000dps,16位数据输出,8位温度输出,I2C/SPI接口。
所述的气压计芯片U4,采用ST公司LPS25H芯片。工作参数:工作电压1.7~3.6V,绝对压力测量范围260~1260hpa,最高分辨率0.01hpa RMS,24位数据输出,ODR频率1~25Hz,低功耗电流4uA,I2C/SPI接口。
如图5所示,所述无线通信模块h包括:远程无线通信模块U5及电容C14。其中,远程无线通信模块U5引脚1、引脚2及引脚7接数字地,引脚6接V3.3电源,并经电容C14去耦至数字地。引脚3与单片机电路主控器U0引脚7相连,引脚4与单片机电路主控器U0引脚5相连,引脚5与单片机电路主控器U0引脚34相连。远程无线通信模块U4通过UART与单片机电路主控器U0通信。
所述的远程无线通信模块U5采用SX1276Lora模块。工作参数:工作电压3.3~5.2V,载波频率433MHz,发射功率30dBm,最大通信距离8km,接口形式UART。
如图6所示,所述MOSFET驱动电路d包括:多路光耦U6、电阻R4-R11、接口J2-J5和电容C15-C18,其中,多路光耦U6的引脚1,引脚3,引脚5,引脚7接V3.3电源,引脚10,引脚12,引脚14及引脚16接V5电源。多路光耦U6引脚2经电阻R4与单片机电路主控器U0引脚24相连,引脚4经电阻R5单片机电路与主控器U0引脚36相连,引脚6经电阻R6与主控器U0引脚21相连,引脚8经电阻R7分别与单片机电路主控器U0引脚22相连,用于输入转速控制信号。多路光耦U6引脚15经电阻R8接数字地,并与接口J2的引脚2相连。多路光耦U6引脚13经电阻R9接数字地,并与接口J3的引脚2相连。多路光耦U6引脚11经电阻R10接数字地,并与接口J4的引脚2相连。多路光耦U6引脚9经电阻R1接数字地,并与接口J5的引脚2相连。接口J2引脚1接V5电源并经电容C15去耦至地,引脚3接数字地,用于驱动第一路MOSFET电路。接口J3引脚1接V5电源并经电容C16去耦至地,引脚3接数字地,用于驱动第二路MOSFET电路。接口J4引脚1接V5电源并经电容C17去耦至地,引脚3接数字地,用于驱动第三路MOSFET电路。接口J5引脚1接V5电源并经电容C18去耦至地,引脚3接数字地,用于驱动第四路MOSFET电路。
所述的多路光耦U6采用Silicon Labs公司Si8640芯片。工作参数:工作电压2.5~5.5V,最高数据传输率150Mbps。
如图7所示,所述摄像头驱动电机驱动电路i包括:电阻R12-R13、三极管Q1、接头J6和电容C19,其中,三极管Q1基极经电阻R12与单片机电路主控器U0引脚26相连,集电极接V5电源,发射极经电阻R13接数字地并与接头J6的引脚2相连用于输出PWM波。接头J6引脚1接V5电源,再经电容C19去耦至地。接头J6引脚3接数字地。接头J6用于连接摄像头驱动电机。
所述的三极管Q1,采用S9013三极管。工作参数:直流增益300,集电极截止电流0.2μA,发射极截止电流0.1μA。
更进一步地,因单片机电路f主控器U0内含片上时钟电路,无需外部时钟电路即可正常工作。在节省硬件成本和电路板面积的同时,提高了系统的EMC和EMI能力。
优选地,所述的主控器U0采用Nuvoton公司M0516Cortex-M0ARM芯片。
优选地,所述的二极管D1采用IN4007二极管。
优选地,所述的电子罗盘芯片U2采用ST公司LSM303芯片。
优选地,所述的三轴陀螺芯片U3采用ST公司L3GD20芯片。
优选地,所述的气压计芯片U4采用ST公司LPS25H芯片。
优选地,所述的远程无线通信模块U5采用SX1276Lora模块。
优选地,所述的多路光耦U6采用Silicon Labs公司Si8640芯片。
优选地,所述的摄像头驱动电机采用JX6221-90数字舵机。
本发明提供一种具有分体结构形式,限制了自由度的中间连接板,纵向旋翼主要用于升力控制,横向旋翼用于飞行方向和姿态控制的旋翼飞行器,具有全地形飞行能力,在野外洞穴探险、着火建筑物室内巡查、化工危险品及放射性物质泄漏等危险领域具有应用前景。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述相应实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
具有防撞功能的分体式全地形多旋翼飞行器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0