







专利摘要
本发明涉及一种悬臂式多参量独立检测装置及检测方法,属于臂式传感器和检测方法。固定面选取的是车架的一个固定平面,底座和固定面通过螺栓一和螺栓二固定在一起,悬臂梁和底座固定连接,梁端磁体位于悬臂梁一端,且正对待测物,随动磁体和待测物通过结合层固定在一起,与梁端磁体相对。本发明结构新颖,安装简单,无需外部供电,节能环保,通过一套装置能独立准确检测三个待测物参量。
权利要求
1.一种悬臂式多参量独立检测装置,其特征在于:包括固定面、底座、悬臂梁、梁端磁体、随动磁体,所述固定面选取的是车架的一个固定平面,底座和固定面通过螺栓一和螺栓二固定在一起,悬臂梁和底座固定连接,梁端磁体位于悬臂梁一端,且正对待测物,随动磁体和待测物通过结合层固定在一起,与梁端磁体相对;
所述悬臂梁是压电悬臂梁,悬臂梁主体上表面从上至下有依次溅射的正电极一、压电层一和负电极一,悬臂梁主体下表面从下至上有依次溅射的正电极二、压电层二和负电极二。
2.根据权利要求1所述的一种悬臂式多参量独立检测装置,其特征在于:所述的固定面还包括汽车的车架或机身中任何一个合适的固定表面。
3.根据权利要求1所述的一种悬臂式多参量独立检测装置,其特征在于:所述梁端磁体或随动磁体为能产生磁性的物体,包括永磁铁或通电线圈。
4.根据权利要求1所述的一种悬臂式多参量独立检测装置,其特征在于:所述随动磁体通过结合层与待测物结合在一起,结合方式包括物理粘接或机械结合。
5.根据权利要求1所述的一种悬臂式多参量独立检测装置,其特征在于:所述的梁端磁体和随动磁体磁极相对布置,且分别位于悬臂梁自由端和待测物侧表面。
6.一种悬臂式多参量独立检测方法,其特征在于,包括下列步骤:
(1)检测装置通过底座固定在固定面上,随动磁体固定在待测物上,随待测物运动,悬臂梁的正负电极用于采集压电层信号U,随动磁体和梁端磁体产生相对运动,位置变化转换为作用力的变化,并让悬臂梁产生形变,待测物周期运动,悬臂梁随之发生振动;
(2)悬臂梁的振动让压电层产生电压输出,并触发检测系统,检测系统启动,采集压电层输出信号U;
(3)信号通过信号处理系统,得到信号的频率f、跨幅d、幅值A信息,通过求解磁力作用下的检测装置的振动方程,待测物转速n和系统的输出信号U的频率f存在良好的线性关系,待测物线速度v和系统的输出信号U的跨幅d也存在良好的线性关系,待测物形变值x和系统的输出信号U的幅值A在一定范围内也存在良好的线性关系;因此,通过信号U的频率f、跨幅d、幅值A信息推算出待测物转速n、检测点线速度v和待测物形变值x,实现独立检测并输出;
(4)待测物转速n、检测物线速度v和待测物形变值x三个量在物理上相互关联,v=k
7.根据权利要求6所述的一种悬臂式多参量独立检测方法,其特征在于:所面向的待检测对象包括轮胎、齿轮,轮胎压力、齿轮内应力和待测物形变值x存在理论关联,可检测的待测物形变值x转换为对轮胎压力、齿轮内应力的检测。
说明书
技术领域
本发明涉及一种悬臂式传感器和检测方法,特别涉及一种悬臂式待测物多参量独立检测装置和检测方法,尤指一种基于压电悬臂梁,通过梁端磁体和随动磁体的相互作用让压电悬臂梁产生响应,进而实现对待测物的转速,速度和形变(以及形变的衍生量,如,轮胎的压力或齿轮的内应力)的独立检测的传感器和检测方法。
背景技术
新一代信息技术是国务院确定的七个战略性新兴产业之一,新一代信息技术分为六个方面,分别是下一代通信网络、物联网、三网融合、新型平板显示、高性能集成电路和以云计算为代表的高端软件。其中,物联网是新一代信息技术的重要组成部分,也是“信息化”时代的重要发展阶段,继计算机、互联网之后世界信息产业发展的第三次浪潮。而物联网的重要一环是智能传感器。
在智能车和智能自动化无人机械加工设备中,传感器都是非常重要的,使车辆和机床能够感觉和与外界通信,因此他们可以安全地运行。直到今天,大量的传感器,如加速度计,ABS传感器,GPS,已经被广泛使用。以智能汽车为例,在所有的事故中,轮胎崩溃和超速是最常见的原因。因此,对高精度、可靠的轮胎信息传感器的需求越来越大。轮胎压力检测系统,也称为TPMS,由传感器单元、控制单元、电源单元和接口组成,其中最重要的部分是形变传感器。二十世纪八十年代初,TPMS首次被欧洲改装为豪华轿车。在1986年,TMPS是第一次使用在乘用车保时捷959。在1991年,通用手机使用TMPS来监测轮胎形变,并给出异常高和低形变警告。后来,从1996年到2000年,雷诺,标致和许多其他汽车制造商采用TPMS到各种大小的车辆。这一突破发生在2004年,当时倍耐力开发了一种可直接粘在轮胎上的TPM传感器。自2004年以来,世界各国都在制定有关TPMS的法规。例如,美国汽车工程师协会在2006年发布了国际TPMS标准ISO 21750的轻型车辆和国际标准化组织的海运J2657标准。
现在的轮胎形变检测系统主要有两种,直接tpms,放置在车轮凸台的表面上,并通过无线发射模块传递轮胎形变,和间接tpms,它使用车轮速度变化,因为轮胎半径变化,而形变变化和转速恒定。其中,直接TPMS是更准确的,因为它直接接触到轮胎。但它需要放在车轮,很难做任何修改后,传感部分建成。因此,更换传感器的电池很难。间接TPMS在放置和数据传输方面很方便,但它的缺点也是显而易见的,这是很难校准,并在很大程度上受到外部工作条件的影响。而且,当速度超过100公里/小时时,间接tpms无法分辨出形变变化造成的细微差异,使其不受直接tpms的影响。
直接轮胎压力传感器可分为2种,由动力源决定。电池供电的轮胎形变传感器使用锂电池为传感器及其信号传输单元供电。大多数电池供电的轮胎压力传感器都使用压阻材料和电容。大多数压阻式轮胎压力传感器输出不稳定,受外界温度影响较大,功耗高。对于电容式轮胎压力传感器,它们通常利用硅膜形变引起的容量变化。因此,当车辆移动速度快时,它们对外部振动噪声非常敏感。而且,它们都需要使用惠斯通电桥来实现明显的输出。因此,它们的稳定性在很大程度上受桥电阻的限制,其功耗很高。因此,其输出不稳定,受外界温度影响较大,功耗高。自供电轮胎压力传感器通常使用磁性传感器和RF传感器,入美国专利US 7,603,894 B2和US 2012/0000277A1。典型磁场传感器是霍尔效应传感器,用于测量与轮胎压力有关的永磁磁块的磁场变化,例如,RF传感器利用RLC串联电路的频率,与电容密切相关,可随轮胎压力改变。此外,还有一些新型胎压传感器,比如美国专利US 6,854,335 B1,利用螺旋结构检测气压,然而这种结构缺点很明显,智能检测阀门形变,而阀门形变在汽车运行过程中是不断变化的,难以实现准确检测。
从上述简要介绍中可以看出,目前的间接轮胎压力传感器主要依赖于轮胎转速测量,因此精度较低。电池供电的直接轮胎压力传感器受限于电池的稳定性,它们需要放置在车轮凸台的表面上,因此很难更换电池,也可以很大程度上影响车辆的移动。至于自供电的,电池不是问题,但信号很容易受到噪音的影响,也很难安装在车辆上。同时也需要考虑检测点形变变化,应尽量让带检测点形变趋于恒定。同时,上述胎压检测传感器功能单一,只能检测胎压。在实际行驶过程中,轮胎的转速和线速度信息也至关重要,为了实现轮胎的智能化,乃至车的智能化,研发一款能同时针对轮胎转速、线速度和形变检测的传感器至关重要。因此,越来越需要开发一个安装简易、能实现自供电、能精确实现多种参量检测的轮胎压力传感器。
同样的,在中国制造2025的趋势下,多参量独立检测装置在其他行业也有着很大应用前景,对传统机械零件智能化检测也是一个重要方面,如对齿轮的运行状态和应力的检测也逐渐成为社会关注的热点,是智能制造与新一代信息技术的重要一环。
同时,为了立体地获取待测物的信息,更全面获取待测轮胎或者机械设备的运行参数,往往需要对多个参数进行同时获取。一般的方法是把不同检测装置进行简单的打包集成,但这样成本高昂,器件复杂,稳定性差,各种信号容易相互干扰。
发明内容
本发明提供一种悬臂式多参量独立检测装置及检测方法,以实现对轮胎、齿轮等关键部件的多参数立体化、独立化、无缘非接触化检测,在智能载具、非接触变形检测等领域有着极其重大的应用前景。
本发明采取的技术方案是:
包括固定面、底座、悬臂梁、梁端磁体、随动磁体,固定面选取的是车架的一个固定平面,底座和固定面通过螺栓一和螺栓二固定在一起,悬臂梁和底座固定连接,梁端磁体位于悬臂梁一端,且正对待测物,随动磁体和待测物通过结合层固定在一起,与梁端磁体相对;
所述的固定面包括而不限于汽车或其他带检测载具、器件的车架,机身的任何一个合适的固定表面。
所述悬臂梁是压电悬臂梁,悬臂梁主体上表面从上至下有依次溅射的正电极一、压电层一和负电极一,悬臂梁主体下表面从下至上有依次溅射的正电极二、压电层二和负电极二;
所述磁体为能产生磁性的物体,包括而不限于永磁铁,通电线圈等能产生磁性的物体。
所述随动磁体通过结合层与待测物结合在一起,结合方式包括而不限于物理粘接,机械结合。
所述的梁端磁体和随动磁体磁极相对布置,且分别位于悬臂梁自由端和待测物侧表面。
当待测物发生转动后,随动磁体和待测物一同旋转,周期性激励梁端磁体,进而改变悬臂梁的振动响应;胎压的变化会转换为磁体之间,悬臂梁长度方向距离变化。经过理论计算,输出的频率和转速正相关,输出信号的跨幅和待测物线速度正相关,幅值和胎压在一定范围内正相关。
一种悬臂式多参量独立检测方法,包括下列步骤:
(1)检测装置通过底座固定在固定面上,随动磁体固定在待测物上,随待测物运动,悬臂梁的正负电极用于采集压电层信号U,随动磁体和梁端磁体产生相对运动,位置变化转换为作用力的变化,并让悬臂梁产生形变,待测物周期运动,悬臂梁随之发生振动;
(2)悬臂梁的振动让压电层产生电压输出,并触发检测系统,检测系统启动,采集压电层输出信号U;
(3)信号通过信号处理系统,如计算机,单片机进行处理,得到信号的频率f、跨幅d、幅值A信息,本发明通过求解磁力作用下的检测装置的振动方程,首次发现待测物转速n和系统的输出信号U的频率f存在良好的线性关系,待测物线速度v和系统的输出信号U的跨幅d也存在良好的线性关系,待测物形变值x和系统的输出信号U的幅值A在一定范围内也存在良好的线性关系,因此,可通过信号U的频率f、跨幅d、幅值A信息推算出待测物转速n、检测点线速度v和待测物形变值x,实现独立检测并输出;
(4)待测物转速n、检测物线速度v和待测物形变值x三个量在物理上相互关联,v=k0nx,其中k0是和检测装置相关的参数,可以在实际使用中相互映证,即用其中任意两个量可以推算出第三个量,并与检测值对比,进行误差分析,提高检测精度。
本发明所面向的带检测对象包含而不限于轮胎、齿轮,轮胎压力、齿轮内应力和待测物形变值x存在理论关联,可检测的待测物形变值x可以转换为对轮胎压力、齿轮内应力的检测。
本发明通过悬臂梁上压电材料的输出信号,能检测出待测物的旋转转速,线速度和胎压大小,并且由于三个参量的检测分别对应输出的不同特征参数,因此三个参量的检测相互独立,可以相互映证,提高检测准确度。
本发明的有益效果是:
1.首次设计出利用压电悬臂梁对待测物参数进行检测的结构;
2.本发明无需外部供电,是被动型传感器,节能,检测系统简单;
3.本发明利用一套结构,能同时检测待测物转速,检测点线速度和胎压,并且三个参量独立检测,检测结果可以相互映证;
4.本发明的应用范围广泛,结构加工方式多样,能用微纳加工工艺量产,也能用宏观工艺制造生产;
综上所述,与现有技术相比,本发明结构新颖,安装简单,无需外部供电,节能环保,通过一套装置能独立准确检测三个待测物参量。
附图说明
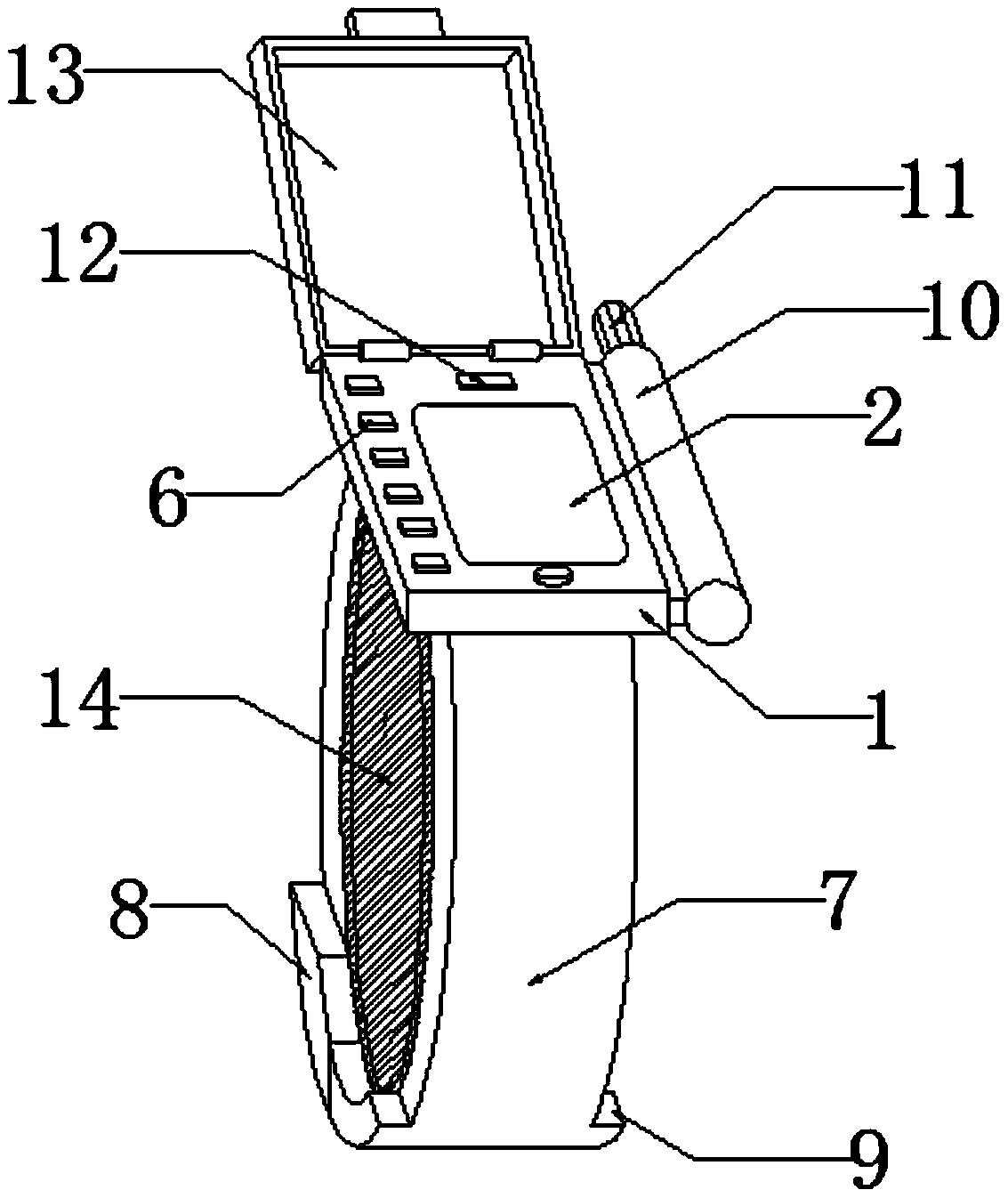
图1是本发明的结构示意图;
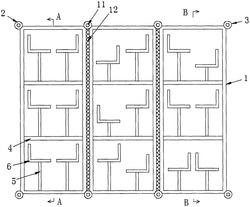
图2是本发明的安装示意图;
图3是本发明底座、悬臂梁的剖视图;
图4是本发明检测信号传递流程图;
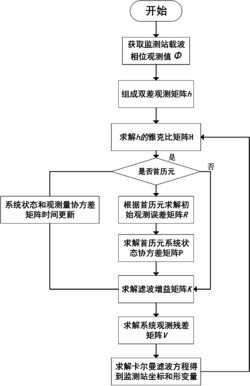
图5是本发明检测方法流程图;
图6是本发明磁体相互作用力曲线图;
图7是本发明待测物旋转是的磁力曲线图;
图8是本发明检测信号示意图和特征参数说明;
图9是本发明不同待测物转速下的输出信号示意图;
图10是本发明待测转速和输出信号转速关系曲线图;
图11是本发明不同待测物线速度下的输出信号示意图;
图12是本发明待测线速度和输出信号跨幅关系曲线图;
图13是本发明待测胎压和输出信号幅值关系曲线图。
具体实施方式
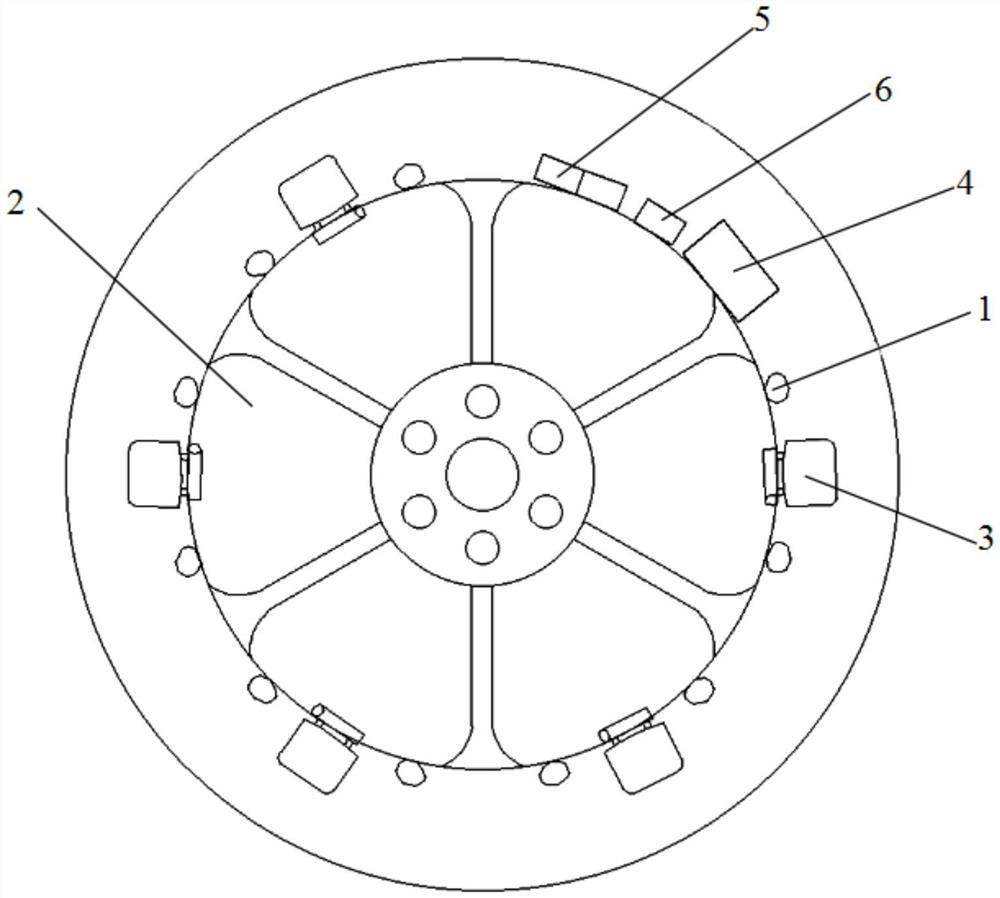
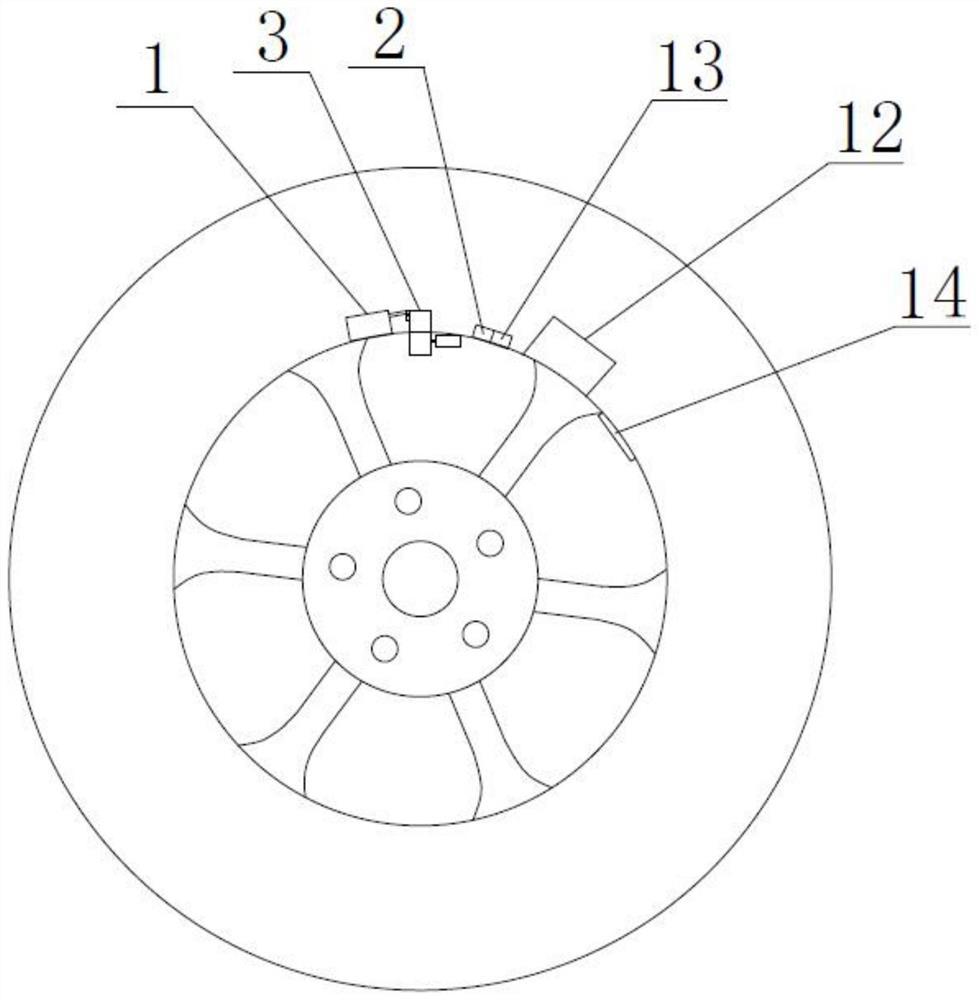
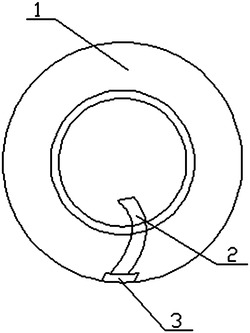
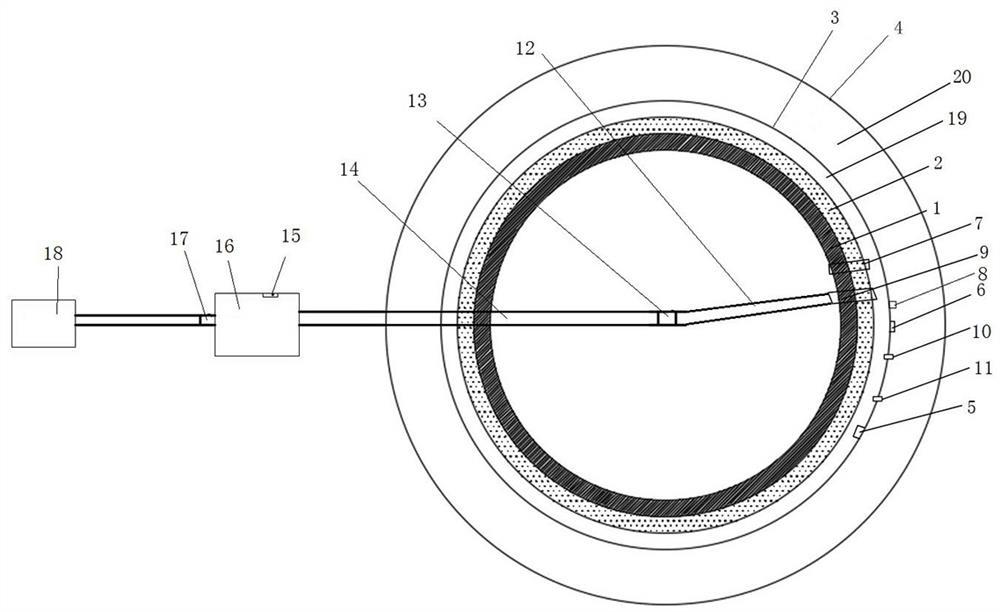
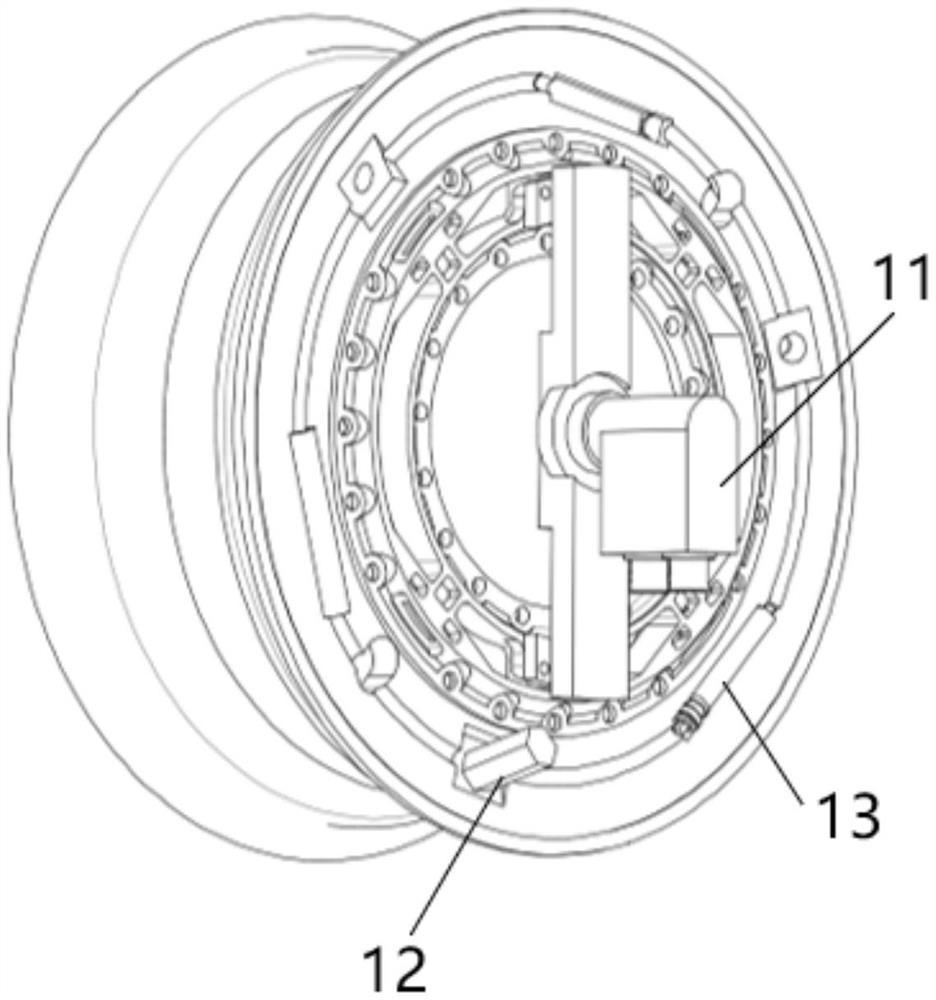
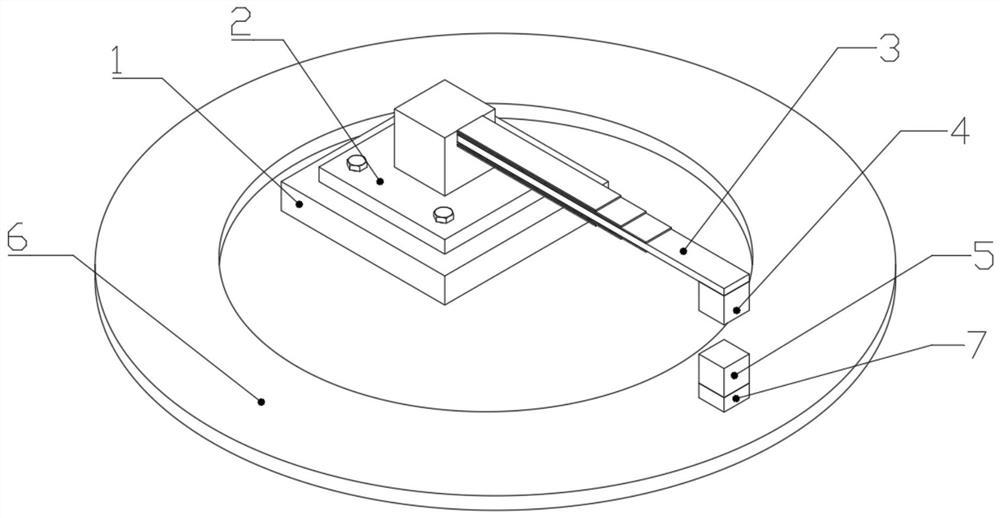
如图1所示,包括固定面1、底座2、悬臂梁3、梁端磁体4、随动磁体5,如图2检测装置安装示意图所示,在本实施例中,待检测对象可以是轮胎的转速n,线速度v和轮胎压力p,固定面1选取的是车架的一个固定平面,底座2和固定面1通过螺栓一201和螺栓二202固定在一起,悬臂梁3和底座2固定连接,本例的悬臂梁3材料是45号钢,和底座2通过一体化车削加工而来,梁端磁体4位于悬臂梁3一端,且正对待测物6,随动磁体5和待测物6通过结合层7固定在一起,与梁端磁体相对;本例用到的磁体均为正方体钕铁硼永磁铁,结合层7为环氧树脂AB胶;所述的固定面包括而不限于汽车或其他带检测载具、器件的车架,机身的任何一个合适的固定表面;
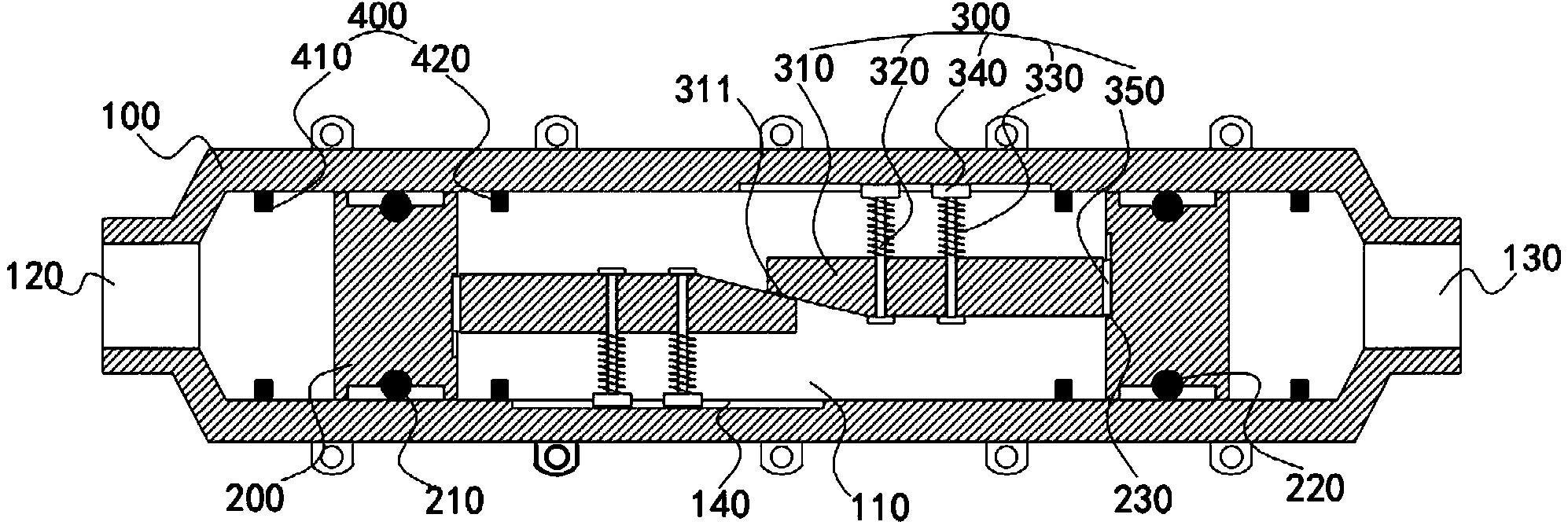
如图3所示,悬臂梁3是压电悬臂梁,悬臂梁主体304是45号钢,悬臂梁主体304上表面从上至下有依次溅射的正电极一301、压电层一302和负电极一303,悬臂梁主体304下表面从下至上有依次溅射正电极二305、压电层二306和负电极二307;
所述磁体为能产生磁性的物体,包括而不限于永磁铁,通电线圈等能产生磁性的物体;
所述随动磁体通过结合层与待测物结合在一起,结合方式包括而不限于物理粘接,机械结合;
所述的梁端磁体和随动磁体磁极相对布置,且分别位于悬臂梁自由端和待测物侧表面。
如图4检测信号传递流程图和图5检测方法流程图所示,检测方法是检测压电层输出信号U的频率f、跨幅d和振幅A,进而利用理论推算的结果,将频率、跨幅和振幅信号换算成待测物转速、检测点线速度和待测物形变值,具体步骤如下:
(1)检测装置安装固定,磁体间产生相互作用;
1)检测装置通过底座2固定在固定面1上,随动磁体5固定在待测物6上,随待测物6运动,悬臂梁3的电极用于采集压电层信号,与外部电路相连,在此实施例中传感器的正、负电极和外围单片机触发电路相连,触发电路和示波器连通,控制示波器工作,示波器信号通过labview软件和计算机的usb口相连,并将信号输入MATLAB软件进行处理;
2)随动磁体和梁端磁体产生相对运动,位置变化转换为作用力的变化,并让悬臂梁产生形变,待测物周期运动,悬臂梁随之发生振动;每次随动磁体5经过梁端磁体4过程中的磁场力变化趋势如图6磁体相互作用力曲线所示,当待测物6持续旋转时,悬臂梁3收到的持续磁场力如图7待测物旋转是的磁力曲线所示,并可以利用傅里叶级数进行拟合,得到其表达式为:
F=a0+a1cos(wt)+b1sin(wt)+a2cos(2wt)+b2sin(2wt)+a3cos(3wt)+b3sin(3wt)+a4cos(4wt)+b4sin(4wt)+a5cos(5wt)+b5sin(5wt)+a6cos(6wt)+b6sin(6wt)+a7cos(7wt)+b7sin(7wt)+a8cos(8wt)+b8sin(8wt);
其中,F为周期性力,w为驱动力傅里叶级数拟合之后的基频角频率,t为时间,其余的a1、a2、a3、a4、a5、a6、a7、a8、b1、b2、b3、b4、b5、b6、b7、b8为傅里叶参数,且再本实施例中,
a0=-0.1367;a1=-0.4416;b1=0.06102;a2=0.9585;
b2=-0.3175;a3=-1.143;b3=0.5724;a4=0.973;
b4=-0.6945;a5=-0.7223;b5=0.7145;a6=0.4549;
b6=-0.6032;a7=-0.2608;b7=0.4964;a8=0.1157;
b8=-0.3417;w=7.265;
(2)悬臂梁的振动让压电层产生电压输出,并触发检测系统,检测系统启动,采集压电层输出信号U;
1)悬臂梁的振动让压电层产生电压输出U,并触发检测系统,振动方程为, 其中m为质量,x1为悬臂梁位移量,c是阻尼系数,k是系统刚度,A1是悬臂梁振幅;
2)检测系统启动,采集压电层输出信号,第三步振动方程中代入F的表达式,利用杜哈梅积分法,通过MATLAB软件计算悬臂梁的响应,如图8检测信号示意图和特征参数说明所示;
(3)信号U通过信号处理系统,本应用例中是计算机和MATLAB软件,分析得到信号U的频率f、跨幅d、幅值A的信息,本发明的研究发现,信号U的频率f、跨幅d、幅值A和待测物的待测量转速n、线速度v和待测物形变值x存在一定的线性关系,可以依据这个实现检测:
1)在不同待测物转速n下,检测装置的输出如图9不同待测物转速下的输出信号示意图所示,通过图9的数据得到待测物的转速n和输出频率f的数据表表1,
表1待测转速n和输出信号频率f数据表
进而得到转速n和输出频率f之间的关系曲线如图10待测转速和输出信号转速关系曲线所示,具有良好的线性关系,能实现对待测物旋转速度n的精准检测;
2)在不同待测物速度v下(保持角速度不变,而改变半径R,实现线速度v改变),检测装置的输出如图11不同待测物线速度下的输出信号示意图所示,得到待测线速度v和输出信号跨幅数据表,见表2;
表2待测线速度v和输出信号跨幅数据表
其关系曲线如图12待测线速度和输出信号跨幅关系曲线所示,具有良好的线性关系,能实现待测点线速度v的精准检测;
3)在不同待测物待测物形变x下,待测物的形变x和输出信号幅值之d间的关系曲线如图13待测胎压和输出信号幅值关系曲线所示,在大范围内具有较好的线性关系,可以实现精准检测;
(4)待测物转速n、检测点线速度v和待测物形变x三个量虽然是利用输出信号的不同特征来检测的,但是在物理上相互关联,满足v=k0nx,可以在实际使用中相互映证,用其中任意两个量可以推算出第三个量,并与检测值对比,进行误差分析,通过标定能确定不同条件下的检测误差,提高检测精度,比如,要检测形变量x,既可以通过检测信号U的振幅A,利用步骤(3)中3)的关系得到x,也可以通过检测出的转速n和线速度v,利用 得到形变量x。
实验例
①带检测物以齿轮为例,则可以检测齿轮的内应力F1,因为应力和形变满足胡克定律,F1=Yx,其中Y是系统的弹性系数,x为前文提到的形变量;
②带检测物以齿轮为例,则可以检测轮胎压力P,由理想气体状态方程得到PV=C1,V=C2x
一种悬臂式多参量独立检测装置及检测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0