







专利摘要
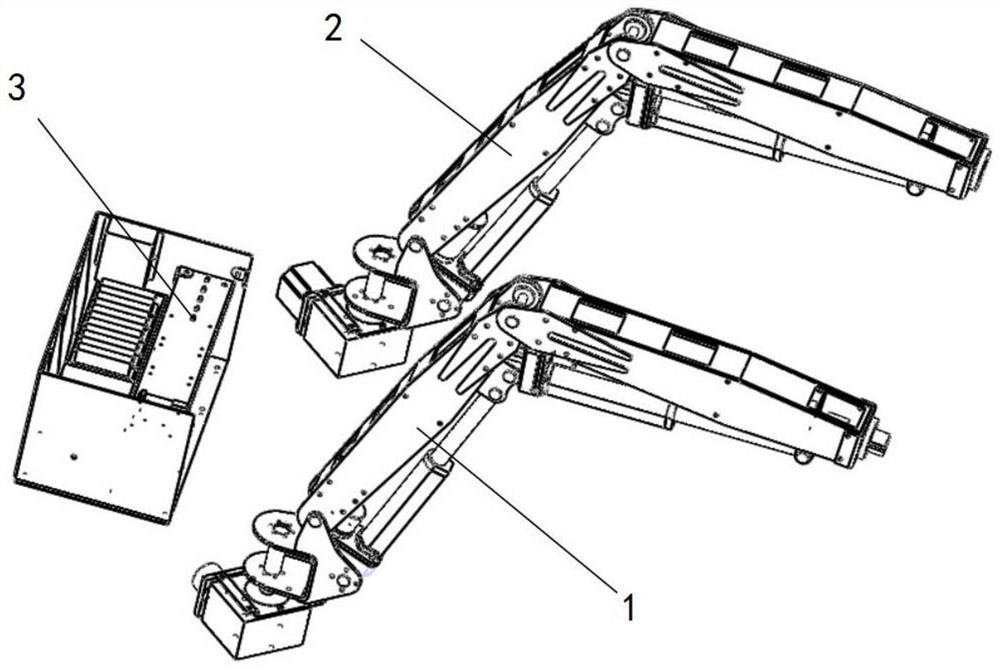
一种具有位置保持功能的五自由度主手,它涉及一种腹腔微创手术机器人主手,以解决现有用于手术机器人的主手结构复杂,位置保持难度大,及腹腔微创手术过程中医生操作手术机器人灵活性差,容易产生疲劳,影响手术治疗的问题,它包括悬挂平台、控制模块、操作校准升降限位平台、第一关节、第二关节、第三关节、第四关节、第一关节位置保持机构、末端执行器调整旋钮和位置保持开关按钮;悬挂平台的上表面布置有控制模块和第一关节位置保持机构;操作校准升降限位平台安装在悬挂平台的下表面;第一关节包括第一壳体、第一中空轴、第一陀螺仪、位置保持轴头和第二关节位置保持机构。本发明用于微创手术机器人主从控制。
权利要求
1.一种具有位置保持功能的五自由度主手,它包括悬挂平台(1)、控制模块(2)、操作校准升降限位平台(3)、第一关节(6)、第二关节(7)、第三关节(8)、第四关节(9)、第一关节位置保持机构(5)、末端执行器调整旋钮(10)和位置保持开关按钮(11);悬挂平台(1)的上表面布置有控制模块(2)和第一关节位置保持机构(5);操作校准升降限位平台(3)安装在悬挂平台(1)的下表面;
第一关节(6)包括第一壳体(6-1)、第一中空轴(6-2)、第一陀螺仪(6-3)、位置保持轴头(6-8)和第二关节位置保持机构;第一壳体(6-1)内布置有第二关节位置保持机构和第一陀螺仪(6-3);第一壳体(6-1)的一端布置有第一中空轴(6-2),第一壳体(6-1)的另一端固装有竖向布置的位置保持轴头(6-8),位置保持轴头(6-8)转动安装在悬挂平台(1)上;
第二关节(7)包括第二壳体(7-1)、第二中空轴(7-2)、第二陀螺仪(7-3)和第三关节位置保持机构,第二壳体(7-1)内布置有第三关节位置保持机构和第二陀螺仪(7-3),第二壳体(7-1)的一端转动安装在第一中空轴(6-2)上,第二壳体(7-1)的另一端布置有第二中空轴(7-2);
第三关节(8)包括第三壳体(8-1)、第三中空轴(8-2)、第三陀螺仪(8-3)和第四关节位置保持机构;第三壳体(8-1)内布置有第四关节位置保持机构和第三陀螺仪(8-3),第三壳体(8-1)的一端转动安装在第二中空轴(7-2)上,第三壳体(8-1)的另一端布置有第三中空轴(8-2);
第四关节(9)包括第四壳体(9-1)和第四陀螺仪(9-2);第四陀螺仪(9-2)布置在第四壳体(9-1)内,第四壳体(9-1)的一端转动安装在第三中空轴(8-2)上,第四壳体(9-1)的另一端安装有末端执行器调整旋钮(10)和位置保持开关按钮(11);末端执行器调整旋钮(10)和位置保持开关按钮(11)分别与控制模块(2)电连接;
第一关节位置保持机构(5)用于调整保持第一关节(6)的位置;第二关节位置保持机构用于调整保持第二关节(7)的位置;第三关节位置保持机构用于调整保持第三关节(8)的位置;第四关节位置保持机构用于调整保持第四关节(9)的位置。;
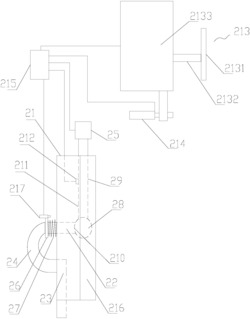
其特征在于:第一关节位置保持机构(5)包括第一电机(5-3)、第一丝杠(5-2)和第一内螺纹滑块(5-1);
驱动器(4)控制第一电机(5-3)的启停,第一电机(5-3)的输出端与第一丝杠(5-2)连接,第一丝杠(5-2)上螺纹连接有第一内螺纹滑块(5-1),第一内螺纹滑块(5-1)的移动能保持位置保持轴头(6-8)的位置。
2.根据权利要求1所述一种具有位置保持功能的五自由度主手,其特征在于:第二关节位置保持机构包括第二电机(6-5)、第二丝杠(6-6)和第二内螺纹滑块(6-7);驱动器(4)控制第二电机(6-5)的启停,第二电机(6-5)的输出端与第二丝杠(6-6)连接,第二丝杠(6-6)上螺纹连接有第二内螺纹滑块(6-7),第二内螺纹滑块(6-7)的移动能锁定第二关节(7)转动。
3.根据权利要求2所述一种具有位置保持功能的五自由度主手,其特征在于:第三关节位置保持机构包括第三电机(7-4)、第三丝杠(7-5)和第三内螺纹滑块(7-6);驱动器(4)控制第三电机(7-4)的启停,第三电机(7-4)的输出端与第三丝杠(7-5)连接,第三丝杠(7-5)上螺纹连接有第三内螺纹滑块(7-6),第三内螺纹滑块(7-6)的移动能锁定第三关节(8)转动。
4.根据权利要求1或3所述一种具有位置保持功能的五自由度主手,其特征在于:第四关节位置保持机构包括第四电机(8-4)、第四丝杠(8-5)和第四内螺纹滑块(8-6);驱动器(4)控制第四电机(8-4)的启停,第四电机(8-4)的输出端与第四丝杠(8-5)连接,第四丝杠(8-5)上螺纹连接有第四内螺纹滑块(8-6),第四内螺纹滑块(8-6)的移动能锁定第四关节(9)转动。
5.根据权利要求4所述一种具有位置保持功能的五自由度主手,其特征在于:操作校准升降限位平台(3)的升降结构为套装式侧向锁紧结构。
说明书
技术领域
本发明涉及一种腹腔微创手术机器人主手,具体涉及一种用于主从控制方式的具有位置保持功能的五自由度腹腔微创手术机器人主手。
背景技术
为了应对复杂的手术情况,用于手术的机器人系统通常采用主从控制方式,主手作为医生手术操作的输入端,将医生期望的运动映射到手术机器人的对应关节上,实现手术操作。目前常见的主手如美国Computer Motion公司开发的ZEUS系统、Intuitive Surgical公司研发的daVinci系统、美国SensAble公司研制的PHANTOM主手和瑞士的Force Dimension公司推出的delta、Sigma以及Omega系列并联主手,价格非常昂贵,操作复杂。经文献检索,申请号为201510111444.7的发明专利提出一种腹腔镜微创手术机器人主从同构式遥操作主手,但是该操作主手采用角度传感器实现角度的检测,增大转动关节尺寸,不具有位置保持功能,为操作带来不便;申请号为201110313771.2的发明专利提出一种具有反馈的九自由度微创手术机器人主操作手,该微创手术机器人主操作手具有力反馈功能,但是该操作主手采用编码器实现角度的检测,整体结构复杂,转动关节较大,增大了位置保持的难度,为了克服现有主手的不足,研究一款具有自主知识产权,易于操作,并可应用于手术操作的主手非常必要。
发明内容
本发明是为解决现有用于手术机器人的主手结构复杂,位置保持难度大,及腹腔微创手术过程中医生操作手术机器人灵活性差,容易产生疲劳,影响手术治疗的问题,进而提供一种具有位置保持功能的五自由度主手。
本发明为解决上述问题采取的技术方案是:一种具有位置保持功能的五自由度主手,它包括悬挂平台、控制模块、操作校准升降限位平台、第一关节、第二关节、第三关节、第四关节、第一关节位置保持机构、末端执行器调整旋钮和位置保持开关按钮;悬挂平台的上表面布置有控制模块和第一关节位置保持机构;操作校准升降限位平台安装在悬挂平台的下表面;
第一关节包括第一壳体、第一中空轴、第一陀螺仪、位置保持轴头和第二关节位置保持机构;第一壳体内布置有第二关节位置保持机构和第一陀螺仪;第一壳体的一端布置有第一中空轴,第一壳体的另一端固装有竖向布置的位置保持轴头,位置保持轴头转动安装在悬挂平台上;
第二关节包括第二壳体、第二中空轴、第二陀螺仪和第三关节位置保持机构,第二壳体内布置有第三关节位置保持机构和第二陀螺仪,第二壳体的一端转动安装在第一中空轴上,第二壳体的另一端布置有第二中空轴;
第三关节包括第三壳体、第三中空轴、第三陀螺仪和第四关节位置保持机构;第三壳体内布置有第四关节位置保持机构和第三陀螺仪,第三壳体的一端转动安装在第二中空轴上,第三壳体的另一端布置有第三中空轴;
第四关节包括第四壳体和第四陀螺仪;第四陀螺仪布置在第四壳体内,第四壳体的一端转动安装在第三中空轴上,第四壳体的另一端安装有末端执行器调整旋钮和位置保持开关按钮;末端执行器调整旋钮和位置保持开关按钮分别与控制模块电连接;
第一关节位置保持机构用于调整保持第一关节的位置;第二关节位置保持机构用于调整保持第二关节的位置;第三关节位置保持机构用于调整保持第三关节的位置;第四关节位置保持机构用于调整保持第四关节的位置。
本发明的有益效果是:一、本发明是为改善目前手术机器人人机交互困难的现状而设计的一款用于腹腔微创手术的机器人主手,该主手与结构相似的机器人手臂可以构成“同构”的主从操作系统,在操控手术机器人进行手术时,具有主-从关系对应清晰,操控简单、灵活,具有位置保持的特点,提高了手术机器人与医生良好的交互性,减轻了医生手术过程中的劳动强度,有助于提高手术质量。二、本发明采用陀螺仪来获得机器人的姿态,可以明显减小主手关节的尺寸。同时在关节处采用位置保持机构设计,使主手在保持结构紧凑的同事具有位置锁定的功能,同时可以提供力反馈,增强医生操作的临场感。
三、本发明采用悬挂平台设计可以更好地适应腹腔手术工作,使主手和从手工作姿态对应更加容易。
四、本发明采用操作校准限位平台设计,可以更好校准主手的零位,并保证主手始终处于安全操作空间内,保证手术机器人不会超出安全范围,增加了腹腔手术应用的安全性。本发明提供给医生,简单灵活的操作方式和清晰的主从对应关系,方便医生通过主手操控手术机器人进行腹腔内手术操作。
附图说明
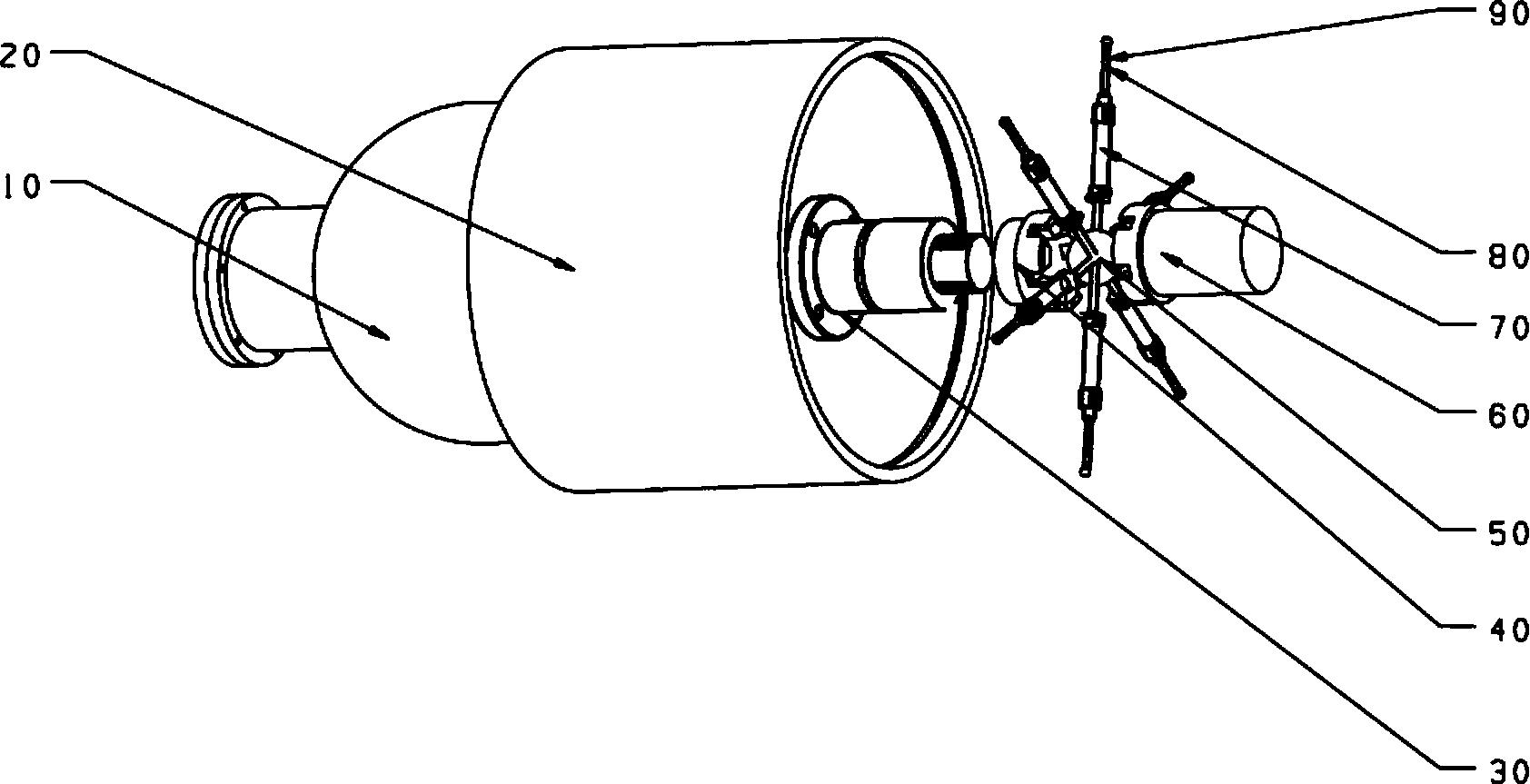
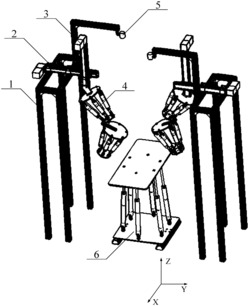
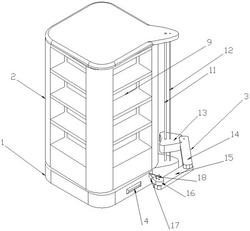
图1为本发明的整体结构示意图;
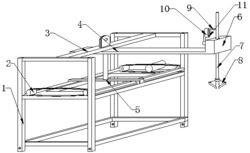
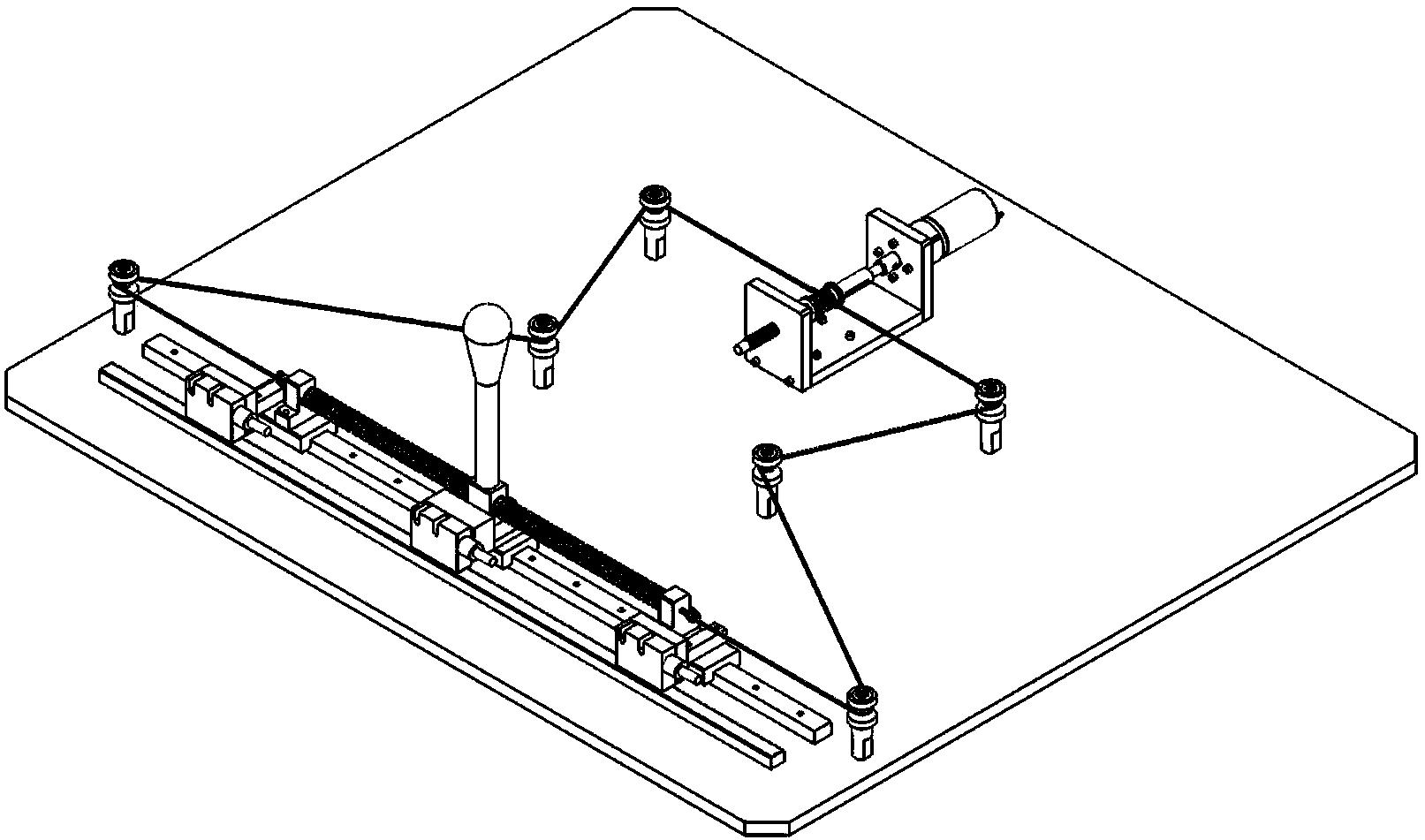
图2为第一关节位置保持机构的结构示意图;
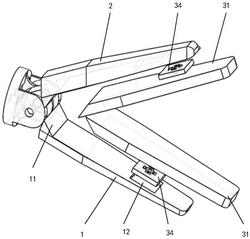
图3为第一关节的立体结构示意图;
图4为图3的主视图;
图5为图4的侧视图;
图6为图5的A-A向视图;
图7为第二关节的立体结构示意图;
图8为图7的主视图;
图9为图8的侧视图;
图10为图9的B-B向视图;
图11为第三关节的立体结构示意图;
图12为图11的主视图;
图13为图12的侧视图;
图14为图13的C-C向视图;
图15为第四关节的立体结构示意图;
图16为图15的主视图。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
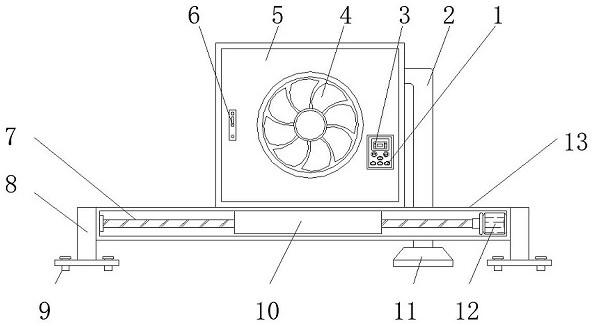
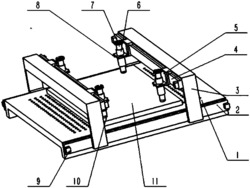
参见图1-图16说明,本实施方式的一种具有位置保持功能的五自由度主手,它包括悬挂平台1、控制模块2、操作校准升降限位平台3、第一关节6、第二关节7、第三关节8、第四关节9、第一关节位置保持机构5、末端执行器调整旋钮10和位置保持开关按钮11;悬挂平台1的上表面布置有控制模块2和第一关节位置保持机构5;操作校准升降限位平台3安装在悬挂平台1的下表面;第一关节6包括第一壳体6-1、第一中空轴6-2、第一陀螺仪6-3、位置保持轴头6-8和第二关节位置保持机构;第一壳体6-1内布置有第二关节位置保持机构和第一陀螺仪6-3;第一壳体6-1的一端布置有第一中空轴6-2,第一壳体6-1的另一端固装有竖向布置的位置保持轴头6-8,位置保持轴头6-8转动安装在悬挂平台2上;
第二关节7包括第二壳体7-1、第二中空轴7-2、第二陀螺仪7-3和第三关节位置保持机构,第二壳体7-1内布置有第三关节位置保持机构和第二陀螺仪7-3,第二壳体7-1的一端转动安装在第一中空轴6-2上,第二壳体7-1的另一端布置有第二中空轴7-2;
第三关节8包括第三壳体8-1、第三中空轴8-2、第三陀螺仪8-3和第四关节位置保持机构;第三壳体8-1内布置有第四关节位置保持机构和第三陀螺仪8-3,第三壳体8-1的一端转动安装在第二中空轴7-2上,第三壳体8-1的另一端布置有第三中空轴8-2;
第四关节9包括第四壳体9-1和第四陀螺仪9-2;第四陀螺仪9-2布置在第四壳体9-1内,第四壳体9-1的一端转动安装在第三中空轴8-2上,第四壳体9-1的另一端安装有末端执行器调整旋钮10和位置保持开关按钮11;末端执行器调整旋钮10和位置保持开关按钮11分别与控制模块2电连接;
第一关节位置保持机构5用于调整保持第一关节6的位置;第二关节位置保持机构用于调整保持第二关节7的位置;第三关节位置保持机构用于调整保持第三关节8的位置;第四关节位置保持机构用于调整保持第四关节9的位置。
操作校准升降限位平台3,安装在悬挂平台1上高度可调,具有主手初始位置校准和操作限位功能。第二关节7和第三关节8的结构相同,主手初始位置校准实现包括使各关节安装陀螺仪侧外壳面共面并与操作校准升降限位平台3的底板侧面重合。操作限位功能通过调整操作校准限位平台高度,限制主手操作范围在悬挂平台与操作校准限位平台之间,从而保证手术过程中操作不会超出安全范围。控制模块2和驱动器4主要完成三部分工作:通过数据线获得主手上的各个关节的姿态信息,并通过输出端口发送给机器人从手控制器;通过数据线接收的“位置保持”信号,控制第一电机至第四电机转动,完成主手的“位置保持”;通过数据线获得末端执行器调整信息,并通过输出端口发送给机器人从手控制器。第一关节6通过轴承6-4与悬挂平台1配合安装。按下位置保持开关按钮11,所有的关节位置保持机构进行工作,锁紧各个关节,反之位置保持状态解除。通过旋转末端执行器调整旋钮10,将通过控制模块2向手术机器人控制器发送末端执行器调整信息。末端执行器调整旋钮10具有一个转动自由度,对应于从手末端执行器上的一个自由度(旋转或位移)。在实现过程中,末端执行器调整旋钮10采用旋转电位计,将旋转量输出给控制模块2,由控制模块2发送给手术机器人的控制器。第一陀螺仪6-3至第四陀螺仪9-2将对应的第一关节至第四关节的姿态传递给控制模块2,由控制模块2发送给手术机器人的控制器,控制模块2包含本领域技术人员知晓的ardiuno微控制器及外围电路。中空轴的设计起到了减重的作用,也起到了方便关节内走线作用,由于主手比较紧凑,体积小,走线空间小,这种设计可以满足走线要求。
参见图1-图3说明,第一关节位置保持机构5包括第一电机5-3、第一丝杠5-2和第一内螺纹滑块5-1;驱动器4控制第一电机5-3的启停,第一电机5-3的输出端与第一丝杠5-2连接,第一丝杠5-2上螺纹连接有第一内螺纹滑块5-1,第一内螺纹滑块5-1的移动能保持位置保持轴头6-8的位置。如此设置,在需要保持第一关节6的位置时,驱动器4控制第一电机5-3动作,第一电机5-3带动第一丝杠5-2运转,进而带动第一内螺纹滑块5-1顶靠位置保持轴头6-8,依靠摩擦力,锁死关节的转动,实现第一关节6的位置保持,将第一关节6的姿态传递给控制模块2,由控制模块2发送给手术机器人的控制器。
参见图1和图6说明,为了进一步保证第二关节7能可靠实现位置保持,第二关节位置保持机构包括第二电机6-5、第二丝杠6-6和第二内螺纹滑块6-7;驱动器4控制第二电机6-5的启停,第二电机6-5的输出端与第二丝杠6-6连接,第二丝杠6-6上螺纹连接有第二内螺纹滑块6-7,第二内螺纹滑块6-7的移动能锁定第二关节7转动。如此设置,驱动器4控制第二电机6-5动作,第二电机6-5带动第二丝杠6-6运转,由于第二壳体7-1的一端转动安装在第一中空轴6-2上,进而带动第二内螺纹滑块6-7伸出顶靠第二壳体7-1并锁定第二关节7绕第一中空轴6-2的轴线旋转,第二陀螺仪7-3检测第二关节7的旋转角度,将第二关节7的姿态传递给控制模块2,由控制模块2发送给手术机器人的控制器。
参见图1和图10说明,为了进一步保证第三关节8能可靠实现位置保持,第三关节位置保持机构包括第三电机7-4、第三丝杠7-5和第三内螺纹滑块7-6;驱动器4控制第三电机7-4的启停,第三电机7-4的输出端与第三丝杠7-5连接,第三丝杠7-5上螺纹连接有第三内螺纹滑块7-6,第三内螺纹滑块7-6的移动能锁定第三关节8转动。如此设置,驱动器4控制第三电机7-5动作,第三电机7-5带动第三丝杠7-6运转,由于第三壳体8-1的一端转动安装在第二中空轴7-2上,进而带动第三内螺纹滑块7-6伸出顶靠第三壳体8-1并锁定第三关节8绕第二中空轴7-2的轴线旋转,第三陀螺仪8-3检测第三关节8的旋转角度,将第三关节8的姿态传递给控制模块2,由控制模块2发送给手术机器人的控制器。
参见图1和图14说明,为了进一步保证第四关节9能可靠实现位置保持,第四关节位置保持机构包括第四电机8-4、第四丝杠8-5和第四内螺纹滑块8-6;驱动器4控制第四电机8-4的启停,第四电机8-4的输出端与第四丝杠8-5连接,第四丝杠8-5上螺纹连接有第四内螺纹滑块8-6,第四内螺纹滑块8-6的移动能锁定第四关节9转动。如此设置,驱动器4控制第四电机8-4动作,第四电机8-4带动第四丝杠8-5运转,由于第四壳体9-1的一端转动安装在第三中空轴8-2上,进而带动第四内螺纹滑块8-6伸出顶靠第四壳体9-1并锁定第四关节9绕第三中空轴8-2的轴线旋转,第四陀螺仪9-2检测第四关节9的旋转角度,将第四关节9的姿态传递给控制模块2,由控制模块2发送给手术机器人的控制器。
由于所有的关节之间的连接轴采用中空设计,数据线与电源线在关节内部穿过,连接控制模块,主手壳体根据工作环境可以采用封闭式,外壳形状可以根据医生的握姿进行调整。参见图1说明,操作校准升降限位平台3的高度可调,为了方便操作,简便易行,操作校准升降限位平台3的升降结构为套装式侧向锁紧结构,可以是一个套管套装在另一个套管上,另一个套管侧面开设顶丝孔,采用顶丝锁紧。
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,但是凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施案例所做的任何简单修改、等同变化与修饰,均仍属本发明技术方案范围。
一种具有位置保持功能的五自由度主手专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0