







![一种单分子磁体[Co4(hmb)4(μ3-OMe)4(MeOH)4]的制备方法](https://www.zhichawang.com/youzhi22/CN102426894A/CN102426894A.jpg)

专利摘要
微小体控制装置(1)是控制样本(90)中的介质中的微小体的动作的装置,包括光源(10)、光学旋涡生成部(20)、物镜(30)、摄像部(60)、解析部(70)和移动部(80)。解析部(70)在由物镜(30)形成的光学旋涡的聚光位置被设定在第1位置时,基于来自对由光学旋涡光捕集的微小体进行了摄像的摄像部(60)的图像数据取得微小体的第1运动信息,在光学旋涡的聚光位置被设定在第2位置时,基于来自对由光学旋涡光捕集的微小体进行了摄像的摄像部(60)的图像数据取得微小体的第2运动信息,通过比较第1运动信息和第2运动信息,来评价由光学旋涡导致的微小体的光捕集的状态。
权利要求
1.一种微小体控制装置,其特征在于,
是控制介质中的微小体的动作的装置,
包括:
光源,其输出光;
光学旋涡生成部,其输入从该光源输出的光并生成光学旋涡;
物镜,其将从该光学旋涡生成部输出的光学旋涡聚光照射于介质中的微小体而对所述微小体进行光捕集;
摄像部,其经由所述物镜对所述微小体进行摄像并输出图像数据;
解析部,其基于从所述摄像部输出的图像数据来解析所述微小体的动作;和
移动部,其使由所述物镜形成的光学旋涡的聚光位置在所述物镜的光轴方向上移动,
在所述物镜的瞳面上生成的光学旋涡的半径相对于所述瞳面的半径为20%以上,
所述解析部,基于从所述摄像部输出的图像数据来解析所述微小体的在光学旋涡的传播轴的周围的圆运动或者椭圆运动,并且在由所述物镜形成的光学旋涡的聚光位置由所述移动部而设定在第1位置时,基于从对由光学旋涡光捕集的所述微小体进行了摄像的所述摄像部输出的图像数据取得所述微小体的第1运动信息,
由所述物镜形成的光学旋涡的聚光位置在所述光轴方向上由所述移动部而设定在不同于所述第1位置的第2位置时,基于从对由光学旋涡光捕集的所述微小体进行了摄像的所述摄像部输出的图像数据取得所述微小体的第2运动信息,
通过比较所述第1运动信息和所述第2运动信息,来评价由光学旋涡形成的所述微小体的光捕集的状态。
2.如权利要求1所述的微小体控制装置,其特征在于:
所述光学旋涡生成部是具有二维排列的多个像素且在各像素中调制光的振幅和相位并进行输出的空间光调制器。
3.如权利要求1或2所述的微小体控制装置,其特征在于:
所述解析部取得所述微小体的速度、角速度、加速度、旋转半径、和根据它们计算出的物理量中的至少任意一者来分别作为所述第1运动信息和所述第2运动信息。
4.如权利要求1或2所述的微小体控制装置,其特征在于:
所述解析部在比较所述第1运动信息和所述第2运动信息时,评价所述第1运动信息和所述第2运动信息的差是否为规定值以下。
5.如权利要求3所述的微小体控制装置,其特征在于:
所述解析部在比较所述第1运动信息和所述第2运动信息时,评价所述第1运动信息和所述第2运动信息的差是否为规定值以下。
6.如权利要求1或2所述的微小体控制装置,其特征在于:
所述移动部包含使光学旋涡的聚光位置移动的压电元件。
7.如权利要求3所述的微小体控制装置,其特征在于:
所述移动部包含使光学旋涡的聚光位置移动的压电元件。
8.如权利要求4所述的微小体控制装置,其特征在于:
所述移动部包含使光学旋涡的聚光位置移动的压电元件。
9.如权利要求5所述的微小体控制装置,其特征在于:
所述移动部包含使光学旋涡的聚光位置移动的压电元件。
说明书
技术领域
本发明涉及控制介质中的微小体的动作的装置。
背景技术
已知有通过对介质中的微小体聚光照射光学旋涡来对该微小体进行光捕集的技术(参照专利文献1和非专利文献1)。光学旋涡在传播轴上具有相位不同点,具有在传播轴上光强度为0,在从传播轴起一定距离的位置上光强度最大的甜甜圈型的光强度分布。
光学旋涡的特征在于除了具有甜甜圈型的光强度分布之外,还具有轨道角运动量。具有轨道角运动量的光学旋涡被照射于介质中的微小体时,该微小体从光学旋涡接受角运动量,沿着传播轴的周围的光强度大的轨道进行旋转。即,光学旋涡能够对介质中的微小体进行光捕集并且控制微小体的运动。
现有技术文献
专利文献
专利文献1:日本特开2008-216641号公报
非专利文献
非专利文献1:Jennifer E.Curtis and David G.Grier,"Structure of OpticalVortices",Phys.Rev.Lett.90,pp.133901-1-133901-4(2003)
非专利文献2:Leach,J.,Mushfique,H.,Keen,S.,Di Leonardo,R.,Ruocco,G.,Cooper,J.M.,and Padgett,M.J.,"Comparison of Faxen's correction for amicrosphere translating or rotating near a surface",Phys.Rev.E79,pp.026301-1-026301-4(2009)
非专利文献3:Peterman,E.J.G.,Gittes,F.,and Schmidt,C.F.,"Laser-InducedHeating in Optical Traps",Biophys.J.84,pp.1308-1316(2003)
发明内容
发明所要解决的技术问题
但是,在现有的技术中,无法评价是否利用光学旋涡正确地光捕集介质中的微小体。
本发明是为了解决上述问题而完成的,其目的在于,提供一种能够评价利用光学旋涡进行的微小体的光捕集的状态的微小体控制装置。
解决问题的技术手段
本发明的微小体控制装置,其特征在于,是控制介质中的微小体的动作的装置,包括:输出光的光源;光学旋涡生成部,其输入从该光源输出的光而生成光学旋涡;物镜,其将从该光学旋涡生成部输出的光学旋涡聚光照射在介质中的微小体而对微小体进行光捕集;摄像部,其经由物镜摄像微小体并输出图像数据;解析部,其基于从摄像部输出的图像数据来解析微小体的动作;和移动部,其使由物镜形成的光学旋涡的聚光位置在物镜的光轴方向上移动。
再有,在本发明的微小体控制装置中,解析部,在由物镜形成的光学旋涡的聚光位置由移动部设定在第1位置时,基于从对由光学旋涡光捕集的微小体进行了摄像的摄像部输出的图像数据取得微小体的第1运动信息,在由物镜形成的光学旋涡的聚光位置在光轴方向上由移动部设定在不同于第1位置的第2位置时,基于从对由光学旋涡光捕集的微小体进行了摄像的摄像部输出的图像数据取得微小体的第2运动信息,通过比较第1运动信息和第2运动信息,来评价由光学旋涡形成的微小体的光捕集的状态。
发明的效果
根据本发明的微小体控制装置,能够评价利用光学旋涡进行的微小体的光捕集的状态。
附图说明
图1是表示微小体控制装置1的构成的图。
图2是表示光学旋涡的强度分布的一个例子的图。
图3是说明利用光学旋涡进行的微小体91的光捕集的图。
图4是说明利用光学旋涡进行的微小体91的光捕集的图。
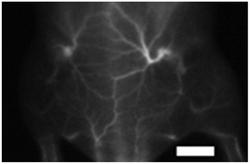
图5是表示在实施例中将光学旋涡的聚光位置设定在某位置时从摄像微小体91的摄像部60输出的图像数据的一个例子的图。
图6是表示实施例中光学旋涡的聚光位置的移动量和微小体的旋转半径的关系的图表。
图7是说明在(a)~(c)实施例中光学旋涡的聚光位置的移动量和微小体的旋转半径的关系的图。
具体实施方式
以下,参照附图,对用于实施本发明的方式进行详细的说明。此外,在附图的说明中,对同一要素标注同一符号,省略重复的说明。
图1是表示微小体控制装置1的构成的图。微小体控制装置1是控制样本90中的介质中的微小体的动作的装置,包括光源10、光学旋涡生成部20、透镜30~33、光圈34、分色镜40、照明部50、摄像部60、解析部70和移动部80。
样本90中的介质是液体或者气体。介质中的微小体(作为控制对象的微小的对象物体)的形状为任意的,例如可以为球体、立方体和圆锥体等。微小体的材料也是任意的,例如可以为聚苯乙烯珠、玻璃、水晶等。微小体具有在介质中能够被光学旋涡光捕集的程度的尺寸和重量。
光源10输出光。光源10例如优选为激光光源。从光源10输出的光优选为由样本90中的介质进行的热吸收小的波长。
光学旋涡生成部20输入从光源10输出的光而生成光学旋涡并将其输出。光学旋涡生成部20生成的光学旋涡是具有螺旋波面的光束,例如为拉盖尔高斯光束、贝塞尔光束。作为光学旋涡生成部20,适合使用例如衍射光学元件或空间光调制器等。
空间光调制器具有二维排列的多个像素且能够在各像素中调制光的振幅和相位并将其输出。当将这样的空间光调制器用作光学旋涡生成部20时,能够不变更光学系统而容易生成各种方式的光学旋涡,能够对微小体的光捕集的状态进行各种评价。作为光学旋涡生成部20使用的空间光调制器可以为透过型的空间光调制器,也可以为反射型的空间光调制器,另外,在后者的情况下,可以为LCOS-SLM(Liquid Crystal on Silicon-SpatialLight Modulator(硅上液晶-空间光调制器))。在图1中,作为光学旋涡生成部20表示反射型的空间光调制器。此外,在图1中,光斜入射到光学旋涡生成部20,但光也可以以更接近垂直的角度入射到光学旋涡生成部20。
透镜31、光圈34、透镜32、分色镜40和物镜30将从光学旋涡生成部20输出的光学旋涡导入到样本90中的介质中的微小体。透镜31和透镜32以光学旋涡生成部20的调制面和物镜30的瞳面彼此成为共轭的位置关系的方式,使从光学旋涡生成部20输出的光学旋涡的振幅分布和相位分布成像于物镜30的瞳面附近。
分色镜40使从光学旋涡生成部20输出的光学旋涡反射。物镜30将从光学旋涡生成部20输出的光学旋涡聚光照射于样本90中的介质中的微小体,对微小体进行光捕集。此外,在入射于物镜30之前的光学旋涡的光路上配置λ/4板或者λ/2板,也能够控制微小体的旋转形状(圆、椭圆形)。
照明部50隔着样本90设置在与物镜30相反的一侧,向样本90输出照明光。照明部50优选输出与从光源10输出的光的波长不同的波长的光。作为照明部50例如能够使用白色光源、汞灯、激光光源等。
摄像部60经由物镜30、分色镜40和透镜33对被照明部50照明的样本90中的微小体进行摄像,并输出图像数据。作为摄像部60例如能够使用CCD照相机、CMOS照相机等。分色镜40使来自被照明部50照明的样本90的光透过。
解析部70基于从摄像部60输出的图像数据,解析样本90中的微小体的动作。作为解析部70例如能够使用个人计算机等。
移动部80使由物镜30形成的光学旋涡的聚光位置在物镜30的光轴方向上移动。移动部80可以使物镜30移动,也可以使样本90移动。移动部80也可以在作为光学旋涡生成部20的空间光调制器显示菲涅耳透镜图案,而使由物镜30形成的光学旋涡的聚光位置移动。另外,移动部80也可以使由物镜30形成的光学旋涡的聚光位置在与物镜30的光轴垂直的方向上移动。移动部80具体而言适合包含例如能够对光学旋涡的聚光位置的移动量进行微调整的压电元件。
图2是表示光学旋涡的强度分布的一个例子的图。图2用浓淡表示光强度,显示越接近白色光强度越大。如图2所示,光学旋涡具有在距传播轴一定距离的位置上光强度变为最大的甜甜圈型的光强度分布。
图3和图4是说明利用光学旋涡进行的微小体91的光捕集的图。图3表示从与光学旋涡L的传播轴垂直的方向看的图。图4表示在光学旋涡L的传播轴方向上看的图,用阴影表示光学旋涡L的甜甜圈状的光强度大的区域。当对样本90聚光照射光学旋涡L时,该光学旋涡L能够对样本90中的介质92中的微小体91进行光捕集,能够使该微小体91在传播轴的周围旋转。微小体91的旋转运动是圆运动或者椭圆运动。
在本实施方式中,按以下的方式评价利用光学旋涡进行的微小体91的光捕集的状态。移动部80将由物镜30形成的光学旋涡的聚光位置设定在第1位置。在设定于该第1位置的状态下,摄像部60摄像由光学旋涡光捕集的微小体91并输出图像数据,解析部70基于该图像数据取得微小体91的第1运动信息。
另外,移动部80将由物镜30形成的光学旋涡的聚光位置设定在光轴方向上不同于第1位置的第2位置。在设定于该第2位置的状态下,摄像部60摄像由光学旋涡光捕集的微小体91并输出图像数据,解析部70基于该图像数据取得微小体91的第2运动信息。然后,解析部70通过比较第1运动信息和第2运动信息,来评价利用光学旋涡进行的微小体91的光捕集的状态。
微小体91的第1运动信息和第2运动信息优选为微小体91的速度、角速度、加速度、旋转半径、和根据它们计算出的物理量的至少任意一者。解析部70具体来说例如在比较第1运动信息和第2运动信息时,评价第1运动信息和第2运动信息的差是否为规定值以下。例如在旋转半径的情况下,解析部70根据第1运动信息和第2运动信息各自的旋转半径的差是否在±5%的范围,来评价微小体91的光捕集的状态。
接着,说明实施例。在本实施例中的光学旋涡生成部20中,使用空间光调制器,显示的全息图用Kirk-Jones的方法设计。设计参数是偏角指数为3、动径指数为0、光束尺寸半径为1.42mm。光束尺寸优选在瞳面上生成的光学旋涡的半径相对于瞳面的半径为20%以上。另外,在本实施例中的样本90中,作为微小体91使用直径0.75μm的聚苯乙烯珠,作为介质92使用纯水。用2个玻璃板夹着环状的间隔件,在由它们形成的空间内收纳微小体和介质。然后,作为物镜30的一个例子利用以100倍(NA1.30)聚光的光学旋涡对介质(纯水)中浮游的微小体(聚苯乙烯珠)进行了光捕集。
利用移动部80将光学旋涡的聚光位置设定在第1位置,利用摄像部60摄像由光学旋涡光捕集的微小体91并输出图像数据,基于该图像数据由解析部70取得微小体91的第1运动信息。另外,利用移动部80将光学旋涡的聚光位置设定在不同于第1位置的第2位置,利用摄像部60摄像由光学旋涡光捕集的微小体91并输出图像数据,基于该图像数据由解析部70取得微小体91的第2运动信息。
图5是表示在实施例中将光学旋涡的聚光位置设定在某一位置时从摄像微小体91的摄像部60输出的图像数据的一个例子的图。如图5所示,确认了与时间的经过(0→t1→t2→…→tn-1→tn)一起微小体91运动而进行旋转运动。
图6是表示在实施例中光学旋涡的聚光位置的移动量和微小体的旋转半径的关系的图表。图7(a)~(c)是说明在实施例中光学旋涡的聚光位置的移动量和微小体的旋转半径的关系的图。如图7所示,用2个玻璃板93、94夹着环状的间隔件95,在由它们形成的空间内收纳微小体91和介质92。
当微小体91被光学旋涡光捕集时,即使使光学旋涡的聚光位置在光轴方向上移动,微小体91的旋转半径r的变化也小(图6(b)、图7(b))。对此,在微小体91处于靠近玻璃板93、94的位置或者与玻璃板93、94相接的情况(图7(a)、(c))下,微小体91的旋转半径r的变化大(图6(a)、(c))。在未实现利用光学旋涡进行的微粒子91的捕集的情况下,微小体91的旋转半径r的变化也大。
这样,微小体控制装置1在物镜30的光轴方向的多个位置分别对光学旋涡进行聚光来取得微小体91的运动信息,通过比较在这些各位置上的微小体91的运动信息,能够评价利用光学旋涡进行的微小体91的光捕集的状态。另外,微小体控制装置1能够评价利用光学旋涡进行的微小体91的光捕集的状态,所以能够可靠地进行由光学旋涡光捕集的微小体91的控制,另外,也能够应用于微型机械的驱动源或粘性测量等。
微小体控制装置1能够在粘性测量时在任意的位置上持续使微粒子91旋转,所以,能够没有可动部地简单地测量介质92的粘性。在非专利文献2中,报告了介质的粘性电阻值因界面(例如盖玻片)和微小体之间的距离而变化。微小体控制装置1能够以简单的方法估计相对于距界面的距离的粘性电阻。另外,在非专利文献3中,报告了因光捕集而产生热。微小体控制装置1也能够根据粘性电阻值估计温度。
本发明的微小体控制装置不限于上述的实施方式和构成例,能够进行各种变形。
在上述实施方式的微小体控制装置中,其是控制介质中的微小体的动作的装置,包括:输出光的光源;光学旋涡生成部,其输入从该光源输出的光而生成光学旋涡;物镜,其将从该光学旋涡生成部输出的光学旋涡聚光照射在介质中的微小体而对微小体进行光捕集;摄像部,其经由物镜摄像微小体并输出图像数据;解析部,其基于从摄像部输出的图像数据来解析微小体的动作;和移动部,其使由物镜形成的光学旋涡的聚光位置相对于包含介质和微小体的样本在物镜的光轴方向上移动。
再有,在上述实施方式的微小体控制装置中,解析部,在由物镜形成的光学旋涡的聚光位置由移动部设定在第1位置时,基于从对由光学旋涡光捕集的微小体进行了摄像的摄像部输出的图像数据取得微小体的第1运动信息,在由物镜形成的光学旋涡的聚光位置在光轴方向上由移动部设定在不同于第1位置的第2位置时,基于从对由光学旋涡光捕集的微小体进行了摄像的摄像部输出的图像数据取得微小体的第2运动信息,通过比较第1运动信息和第2运动信息,来评价由光学旋涡形成的微小体的光捕集的状态。
在上述构成的微小体控制装置中,光学旋涡生成部优选为具有二维排列的多个像素且在各像素中调制光的振幅和相位并进行输出的空间光调制器。另外,作为光学旋涡生成部也可以使用空间光调制器以外的光学元件等。
另外,解析部优选基于从摄像部输出的图像数据解析微小体的圆运动或者椭圆运动。
另外,解析部优选取得微小体的速度、角速度、加速度、旋转半径和根据它们计算出的物理量的至少任意一者来分别作为第1运动信息和第2运动信息。由此,能够适当评价利用光学旋涡进行的微小体的光捕集的状态。
另外,解析部优选在比较第1运动信息和第2运动信息时,评价第1运动信息和第2运动信息的差是否为规定值以下。另外,第1运动信息和第2运动信息的比较也可以使用上述以外的方法。
另外,移动部优选包含使光学旋涡的聚光位置移动的压电元件。在该情况下,例如能够通过压电元件对光学旋涡的聚光位置的移动量进行微调整。
工业上的可利用性
本发明能够用作评价利用光学旋涡进行的微小体的光捕集的状态的微小体控制装置。
符号的说明
1…微小体控制装置;10…光源;20…光学旋涡生成部;30~33…透镜;40…分色镜;50…照明部;60…摄像部;70…解析部;80…移动部;90…样本;91…微小体;92…介质;93、94…玻璃板;95…间隔件。
微小体控制装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0