
")








专利摘要
本发明公开了一种非线性参数变化模型辨识方法(NPV),属于工业辨识领域。本发明提供对非线性参数变化的辨识对象进行辨识实验和模型辨识,首先通过局部非线性模型实验、辨识局部非线性模型、工作点变量过渡实验等步骤,辨识出多输入单输出非线性参数变化模型;在完成所有被控变量的多输入单输出非线性参数变化模型的基础上,构建完整的多输入多输出非线性参数变化模型。使用本发明的方法,无需深入了解辨识对象的机理特性,只需利用较少的输入和输出辨识数据,即可辨识得到辨识对象的非线性参数变化模型。所得到的非线性参数变化模型,可以用于基于模型控制算法的设计和过程仿真,也可以用于对产品质量预报的推理模型和软测量器中。
权利要求
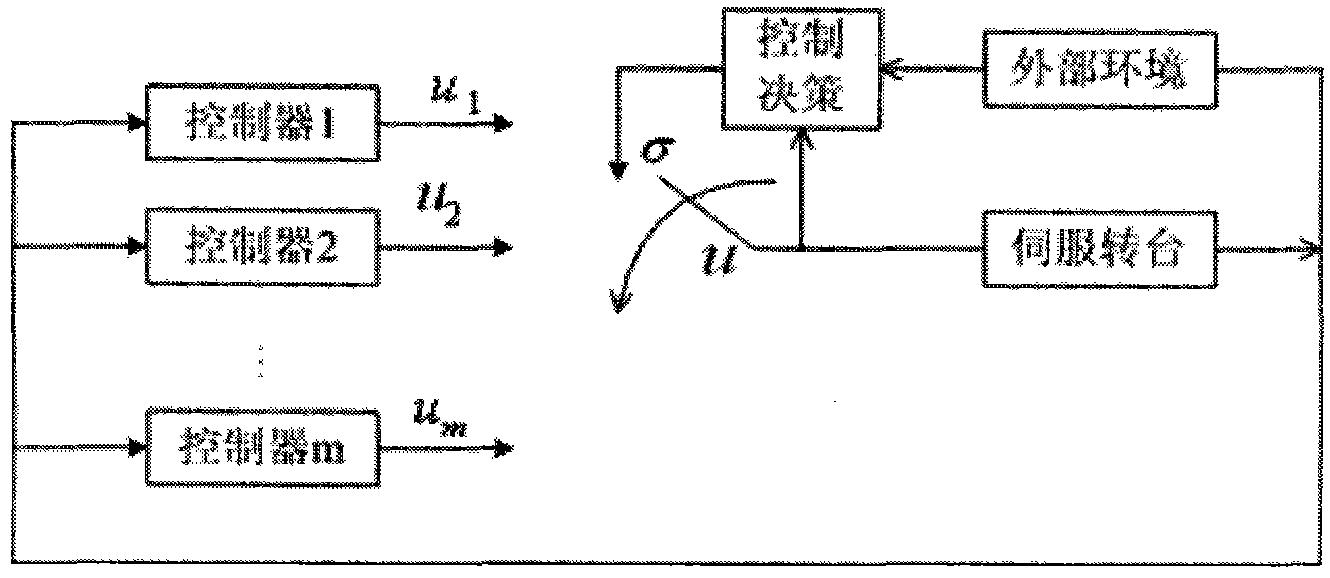
1.一种非线性参数变化(NPV)模型辨识方法,所述方法基于非线性模型辨识系统,所述系统包括输入模块、辨识对象、输出模块和系统辨识模块四个部分,所述输入模块将激励信号施加于辨识对象中,辨识对象的输出信号则通过所述输出模块输出到系统辨识模块,所述辨识对象的运行状况用一个或多个工作点变量的状况来描述,所述方法包括以下步骤:
步骤(1),局部非线性模型实验:所述局部是指工作点变量值保持恒定;首先设定工作点变量值,在工作点变量值保持恒定的前提下,设定控制变量在工作区间的取值,然后通过输入模块遍历所有控制变量(MV)在各自工作区间的取值,从输出模块获取所针对的一个被控变量(CV)的稳态输出数据,如果控制变量(MV)的数量多于一个,当通过输入模块遍历某个控制变量在其工作区间的取值时,其他控制变量保持不变;最后将激励信号通过输入模块施加于辨识对象的所有控制变量(MV),从输出模块获取所述所针对的一个被控变量(CV)的动态输出数据;
步骤(2),辨识局部非线性模型:所述系统辨识模块采用步骤(1)所获取的稳态输出数据和动态输出数据通过非线性辨识方法来估计局部非线性模型的参数,自动完成局部非线性模型的辨识,获得步骤(1)所设定的工作点变量值的局部非线性模型;
步骤(3),重复上述步骤(1)、(2),自动完成所需全部工作点变量值的局部非线性模型的辨识,获得所需全部工作点变量值的局部非线性模型,所述全部工作点变量值包括工作点变量的工作区间的上限与下限;然后检验局部非线性模型是否满足所需要的精度阈值,当不满足时,调整控制变量在工作区间的取值或/和调整激励信号,回至步骤(1);否则,继续;
步骤(4),工作点变量过渡实验:所述的工作点变量过渡为通过输入模块将辨识对象从一个工作点变量值过渡到另一个工作点变量值的过程;在工作点变量过渡实验中,改变工作点变量值,并将激励信号通过输入模块施加于辨识对象的控制变量(MV),从输出模块获取所述所针对的一个被控变量(CV)的工作点变量过渡动态数据;
步骤(5),辨识多输入单输出非线性参数变化模型:对所需全部工作点变量值的局部非线性模型进行插值操作,以使局部非线性模型转化为多输入单输出非线性参数变化(NPV )模型,插值操作中用到的权值函数由包括局部非线性模型实验数据和工作点变量过渡实验数据的全部实验数据,通过参数辨识来确定;
步骤(6),检验步骤(5)获得的多输入单输出非线性参数变化(NPV )模型是否满足其精度阈值;当不满足时,增加局部非线性模型数量并回至步骤(3),或增加工作点变量过渡实验数据并回至步骤(4);满足时,继续;
步骤(7),重复步骤(1)到步骤(6),辨识出所有被控变量(CV)的多输入单输出非线性参数变化(NPV )模型,然后把所有的被控变量(CV)的多输入单输出非线性参数变化(NPV )模型放在一起,完成多输入多输出非线性参数变化(NPV )模型的辨识。
2.根据权利要求1所述的非线性参数变化模型辨识方法,其特征在于:所述步骤(2)中,所述非线性辨识方法是基于非参数模型的辨识方法,或是基于Hammerstein或者wiener 结构模型的系统辨识方法。
3.根据权利要求2所述的非线性参数变化模型辨识方法,其特征在于:所述步骤(2)中,所述基于Hammerstein或者wiener 结构模型的系统辨识方法是基于Hammerstein或者wiener 结构参数模型的系统辨识方法,或是基于Hammerstein或者wiener 结构非参数与参数的混合模型的系统辨识方法;所述基于Hammerstein或者wiener 结构模型是由归一化稳态非线性和线性部分模型构成。
4.根据权利要求3所述的非线性参数变化模型辨识方法,其特征在于:所述步骤(2)中,所述基于Hammerstein结构非参数与参数混合模型的系统辨识方法采用非线性混合Hammerstein模型的结构,该结构由稳态的归一化直接线性反馈神经网络(DLF)和线性部分模型构成。
5.根据权利要求4所述的非线性参数变化模型辨识方法,其特征在于: 所述步骤(2)中,基于非线性混合Hammerstein模型的结构的非线性辨识方法,包含如下步骤:
1)稳态的归一化直接线性反馈神经网络(DLF)的训练:(a) 归一化该工作点变量值的被控变量(CV)的稳态输出数据, (b) 归一化后的稳态输出数据和稳态输入数据对 线性代数方程组进行拟合,所述 为稳态输入数据,所述 为常系数,所述 为中间变量,(c) 再计算对象归一化后的稳态输出数据与 之间的差值 ,(d) 采用差值 与稳态输入数据 来训练多层前向BP神经网络映射;
2)线性部分模型的辨识:(a) 利用已获得的稳态DLF神经网络,将所有动态输入数据 转换为中间变量 ,(b) 以中间变量 和动态输出数据 作为线性部分的输入数据和输出数据,采用线性辨识方法来确定线性部分模型的参数。
6.根据权利要求5所述的非线性参数变化模型辨识方法,其特征在于:步骤(5)包含以下步骤:
1)首先对所需全部工作点变量值的局部非线性模型的归一化的直接线性反馈神经网络(DLF),用三角权值函数进行加权处理;
2)然后根据已经得到所需全部工作点变量值的局部非线性模型,通过权值函数对局部非线性模型实验和工作点变量过渡实验的输入数据和输出数据进行曲线拟合,采用最小二乘方法估计出权值函数的参数。
7.根据权利要求6所述的非线性参数变化模型辨识方法,其特征在于:对所需全部工作点变量值的局部非线性模型的归一化的直接线性反馈神经网络(DLF),用三角权值函数进行加权处理时,三角权值函数是预先设定的,不需要参数辨识。
8.根据权利要求1所述的非线性参数变化模型辨识方法,其特征在于:所述步骤(5)中,插值操作中使用的权值函数是工作点变量的非线性函数,所述权值函数采用样条函数、指数函数或多项式函数。
9.根据权利要求1所述的非线性参数变化模型辨识方法,其特征在于:所述步骤(5)中权值函数的参数估计采用最小二乘方法或极大似然估计方法。
说明书
技术领域
本发明涉及工业系统辨识领域,用来辨识炼油、石化、电力、化工、制药、冶金、食品和造纸等对象为非线性参数变化的流程工业生产过程。本发明所获得的非线性参数变化(NPV)模型可用于基于模型控制算法的设计和过程仿真,也可以用于对产品质量预报的推理模型和软测量器中。
背景技术
当前,为了满足对复杂非线性系统控制的需要,很多基于模型的控制算法已经提出(如模型预测控制、鲁棒控制、非线性控制、最优控制等),然而制约这些控制算法广泛运用的一个很重要的因素就是需要一个精确可靠、所需辨识数据少的非线性模型。对于非线性的辨识研究,非线性和线性参数变化的模型辨识一直是研究的热点。
在非线性辨识领域,主要有三类主要的辨识方法:一是分段线性化方法,该方法适用于非线性较弱的系统辨识;二是基于非参数模型的辨识,主要有神经网络的辨识方法和基于模糊的辨识方法;三是基于Hammerstein或者wiener模型结构的系统辨识,该方法用稳态非线性环节和线性动态模型来描述,在非线性辨识领域已有广泛运用。上述的非线性辨识方法,都是基于参数不变(也即恒定的工作点变量值)的辨识。然而在实际工业中,基于参数变化的模型辨识对于控制器的设计优化会带来很大的改善。
近几年,在线性参数变化的模型辨识领域已取得较大进展。线性参数变化模型辨识(Linear Parameter Varying,简称LPV)的概念最早是由Shamma和Athans提出的,以参数变化的线性模型描述系统而得名。该领域主要方向可以分两类:一类是基于参数插值LPV模型辨识方法,另一类是基于模型插值LPV辨识方法。在文献Yu Zhao et al.(2011):Prediction error method for identification of LPVmodels.Journal of Process Control,22(1):180-193中指出:模型插值LPV辨识方法在计算时间和精度上都优于参数插值LPV模型辨识方法。虽然线性参数变化模型能很好地解决参数非线性变化对系统的影响,但只用简单的线性模型描述了恒定工作点变量值的模型,忽略了恒定工作点变量值时系统输入输出的非线性。然而在实际工业过程中,不仅存在参数变化的非线性,恒定工作点变量值时系统输入输出的非线性也普遍存在。
因此,提出一种所需辨识数据少、精度高、能够同时描述恒定工作点变量值时系统输入输出的非线性和参数随工作点变量变化的非线性的模型辨识方法,对于基于模型的控制来说,具有重大意义。
发明内容
为了解决所需的技术问题,本文提出一种非线性参数变化模型辨识方法(Nonlinear Parameter Varying,简称NPV),采用以下技术方案:
提出一种非线性参数变化(NPV)模型辨识方法,所述方法基于非线性模型辨识系统,所述系统包括输入模块、辨识对象、输出模块和系统辨识模块四个部分,所述输入模块将激励信号施加于辨识对象中,辨识对象的输出信号则通过所述输出模块输出到系统辨识模块,所述辨识对象的运行状况用一个或多个工作点变量的状况来描述,所述方法包括以下步骤:
步骤(1),局部非线性模型实验:所述局部是指工作点变量值保持恒定;首先设定工作点变量值,在工作点变量值保持恒定的前提下,设定控制变量在工作区间的取值,然后通过输入模块遍历所有控制变量(MV)在各自工作区间的取值,从输出模块获取所针对的一个被控变量(CV)的稳态输出数据,如果控制变量(MV)的数量多于一个,当通过输入模块遍历某个控制变量在其工作区间的取值时,其他控制变量保持不变;最后将激励信号通过输入模块施加于辨识对象的所有控制变量(MV),从输出模块获取所述所针对的一个被控变量(CV)的动态输出数据;本发明所述的工作点变量值保持恒定,可以是指工作点变量值精确地等于某一个恒定值,也可以是指工作点变量值围绕某一个恒定值作微小范围波动,所述的微小范围波动,可能是由于工况的细微波动、检测仪表的噪声、执行器的抖动等工业过程现场普遍存在的客观因素造成的,也可能是在辨识实验过程中采用广义二进制噪声实验信号(GBN)与小幅度白噪声的叠加信号作为激励信号通过输入模块施加于辨识对象的控制变量时所产生的,举例来说,如果一个反应器的反应温度被选做工作点变量,该反应温度可能在319.8K-320.2K之间作微小范围波动,并且反应温度平均值非常接近320K,则本发明认为该工作点变量值保持恒定,恒定的值为320K;本发明所述的工作点变量可以是控制变量(MV)、被控变量(CV)或其他能够描述辨识对象运行状况的中间变量;
步骤(2),辨识局部非线性模型:所述系统辨识模块采用步骤(1)所获取的稳态输出数据和动态输出数据通过非线性辨识方法来估计局部非线性模型的参数,自动完成局部非线性模型的辨识,获得步骤(1)所设定的工作点变量值的局部非线性模型;
步骤(3),重复上述步骤(1)、(2),自动完成所需全部工作点变量值的局部非线性模型的辨识,获得所需全部工作点变量值的局部非线性模型,所述全部工作点变量值包括工作点变量的工作区间的上限与下限;然后检验局部非线性模型是否满足所需要的精度阈值,当不满足时,调整控制变量在工作区间的取值或/和调整激励信号,回至步骤(1);否则,继续;
步骤(4),工作点变量过渡实验:所述的工作点变量过渡为通过输入模块将辨识对象从一个工作点变量值过渡到另一个工作点变量值的过程;在工作点变量过渡实验中,改变工作点变量值,并将激励信号通过输入模块施加于辨识对象的控制变量(MV),从输出模块获取所述所针对的一个被控变量(CV)的工作点变量过渡动态数据;
步骤(5),辨识多输入单输出非线性参数变化模型:对所需全部工作点变量值的局部非线性模型进行插值操作,以使局部非线性模型转化为多输入单输出非线性参数变化(NPV)模型,插值操作中用到的权值函数由包括局部非线性模型实验数据和工作点变量过渡实验数据的全部实验数据,通过参数辨识来确定;
步骤(6),检验步骤(5)获得的多输入单输出非线性参数变化(NPV)模型是否满足其精度阈值;当不满足时,增加局部非线性模型数量并回至步骤(3),或增加工作点变量过渡实验数据并回至步骤(4);满足时,继续;
步骤(7),重复步骤(1)到步骤(6),辨识出所有被控变量(CV)的多输入单输出非线性参数变化(NPV)模型,然后把所有的被控变量(CV)的多输入单输出非线性参数变化(NPV)模型放在一起,完成多输入多输出非线性参数变化(NPV)模型的辨识。
在步骤(2)中,所述非线性辨识方法是基于非参数模型的辨识方法,或是基于Hammerstein或者wiener结构模型的系统辨识方法。
在步骤(2)中,所述基于Hammerstein或者wiener结构模型的系统辨识方法是基于Hammerstein或者wiener结构参数模型的系统辨识方法,或是基于Hammerstein或者wiener结构非参数与参数的混合模型的系统辨识方法;所述基于Hammerstein或者wiener结构模型是由归一化稳态非线性和线性部分模型构成。
在步骤(2)中,所述基于Hammerstein结构非参数与参数混合模型的系统辨识方法采用非线性混合Hammerstein模型的结构,该结构由稳态的归一化直接线性反馈神经网络(Direct Linear Feedback,简称DLF)和线性部分模型构成。
在步骤(2)中,基于非线性混合Hammerstein模型的结构的非线性辨识方法,包含如下步骤:
1)稳态的归一化直接线性反馈神经网络(DLF)的训练:(a)归一化该工作点变量值的被控变量(CV)的稳态输出数据,(b)归一化后的稳态输出数据和稳态输入数据对X(t)=WU(t)线性代数方程组进行拟合,所述U(t)为稳态输入数据,所述W为常系数,所述X(t)为中间变量,(c)再计算对象归一化后的稳态输出数据与WU(t)之间的差值E(t),(d)采用差值E(t)与稳态输入数据U(t)来训练多层前向BP神经网络映射;
2)线性部分模型的辨识:(a)利用已获得的稳态DLF神经网络,将所有动态输入数据{U(t)}转换为中间变量{X(t)},(b)以中间变量{X(t)}和动态输出数据{Y(t)}作为线性部分的输入数据和输出数据,采用线性辨识方法来确定线性部分模型的参数。
步骤(5)包含以下步骤:
1)首先对所需全部工作点变量值的局部非线性模型的归一化的直接线性反馈神经网络(DLF),用三角权值函数进行加权处理;所述三角权值函数是预先设定的,不需要参数辨识;
2)然后根据已经得到所需全部工作点变量值的局部非线性模型,通过权值函数对局部非线性模型实验和工作点变量过渡实验的输入数据和输出数据进行曲线拟合,采用最小二乘方法估计出权值函数的参数。
在步骤(5)中,插值操作中使用的权值函数是工作点变量的非线性函数,所述权值函数采用样条函数、指数函数或多项式函数;所述权值函数的参数估计采用最小二乘方法或极大似然估计方法。
本发明具有的有益的效果是:
(1)本发明提出一种非线性参数变化模型辨识方法,仅需沿着操作运行轨迹进行辨识实验和模型辨识,大幅降低了模型辨识实验的成本,模型辨识的计算过程简单而又可靠,并且同时考虑了恒定工作点变量值时系统输入输出的非线性和参数随工作点变量变化的非线性;无需深入了解辨识对象的机理特性,只需利用较少的输入和输出辨识数据即可实现非线性参数变化对象的黑箱辨识。
(2)本发明所述的局部非线性模型,可以是基于非参数模型的辨识(如基于神经网络的辨识方法、基于模糊函数的辨识方法等),也可以是基于Hammerstein或者wiener结构参数模型或混合结构的系统辨识,能很好地结合非线性和线性参数变化领域已有的成果。
(3)基于Hammerstein或者wiener结构非参数与参数的混合模型的系统辨识,可以采用非线性混合Hammerstein模型典型结构,该结构由稳态归一化的直接线性反馈神经网络(DLF)和线性部分模型构成。该模型结构具有非线性拟合精度高、能逼近大部分工业非线性特性、易于控制器设计等优点。
(4)利用对所得到局部非线性模型的稳态归一化的直接线性反馈神经网络(DLF)进行三角函数加权处理,三角权值函数是预先设定的,不需要参数辨识,操作简单,并且考虑了非线性趋势变化的补偿,满足工业中大部分对象的精度要求。
(5)本发明的权值函数的参数估计采用最小二乘方法,也可采用极大似然估计,使模型辨识的计算过程简单而又可靠,学习速度快,推广泛化能力强。
(6)对所需全部的局部非线性模型进行插值操作,以使局部非线性模型转化为非线性参数变化(NPV)模型,仅沿着由所设定的工作点变量值和工作点变量过渡组成的操作运行轨迹进行辨识实验和模型辨识,大幅降低模型实验的成本。
(7)非线性参数变化(NPV)模型辨识方法能够对复杂机理模型实现模型简化,也可用于基于模型控制算法的设计和过程仿真,以及用于对产品质量预报的推理模型和软测量器中。
附图说明
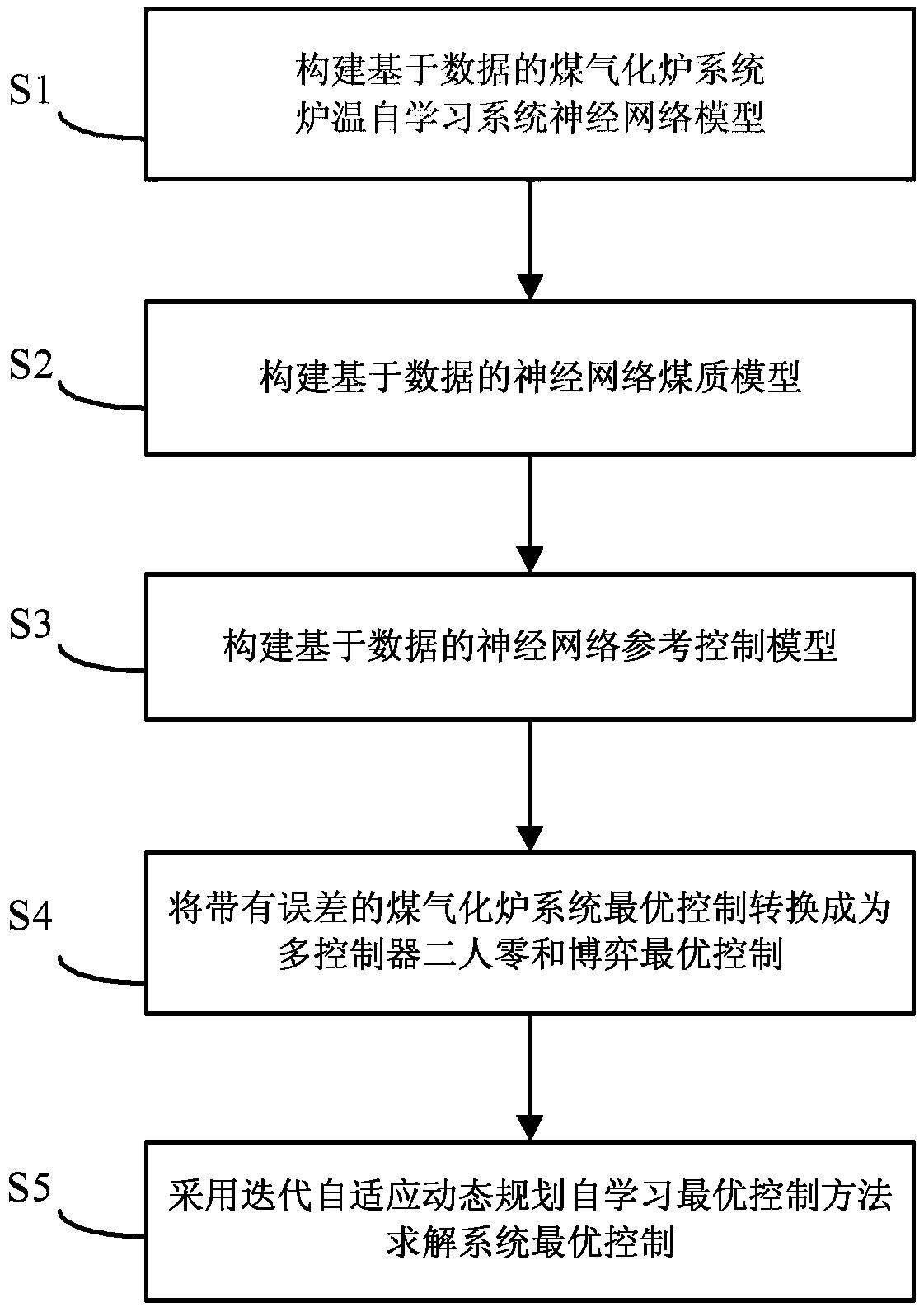
图1为多输入多输出非线性参数变化(NPV)模型辨识方法的流程图。
图2为局部非线性实验流程图。
图3为工作点变量过渡实验流程图。
图4为直接线性反馈神经网络(DLF)模型结构图。
图5为两输入两输出的非线性混合Hammerstein模型结构图。
图6为在带夹套的连续搅拌釜反应器(jacketed CSTR)中苯乙烯自由基溶液聚合的工艺流程图。
图7为工作点变量引发剂流量u1的输入信号图。
图8为控制变量冷却水流量u2的输入信号图。
图9为在图7和图8的输入激励下,被控变量产物数均分子量y1的输出响应图。
图10为在图7和图8的输入激励下,被控变量反应温度y2的输出响应图。
图11为控制变量冷却水流量u2的输入信号图,此时工作点变量引发剂流量u1=0.02L/s。
图12为在图11的输入激励下,被控变量产物数均分子量y1的输出响应图。
图13为在图11的输入激励下,被控变量反应温度y2的输出响应图。
具体实施方式
本发明可以同时处理工业过程对象在工作点变量值恒定时系统输入输出的非线性和参数随工作点变量变化的非线性。参数变化过程在实际工业过程的典型实例,包括:不同黏度的润滑油生产单元、多产品牌号的聚合物装置、不同负荷下的燃煤发电机组。这些过程在不同工作点变量值或不同操作运行范围内产生的变化很不相同,并且变化规律一般也是非线性的。工作点变量可以是控制变量(MV)、被控变量(CV)或其他能够描述辨识对象运行状况的中间变量;例如:燃煤发电机组负荷(中间变量),原料供给量(控制变量),润滑油生产单元的黏度(被控变量)。
非线性参数变化(NPV)就是说非线性模型的参数是随着工作点变量的变化而变化的。对某个恒定的工作点变量值而言,NPV模型具有相应的局部非线性模型;如果设定三个工作点变量值,就存在三个局部非线性模型。每个局部非线性模型的稳态非线性增益(或放大倍数)和时间常数等作为工作点变量的函数而随之变化。所述方法包括以下步骤来实现对非线性参数变化模型的辨识:
一种非线性参数变化(NPV)模型辨识方法,所述方法基于非线性模型辨识系统,所述系统包括输入模块、辨识对象、输出模块和系统辨识模块四个部分,所述输入模块将激励信号施加于辨识对象中,辨识对象的输出信号则通过所述输出模块输出到系统辨识模块,所述激励信号采用广义二进制噪声实验信号(GBN)与小幅度白噪声的叠加信号,所述辨识对象的运行状态用一个或多个工作点变量的状态来描述。非线性参数变化(NPV)模型辨识方法的流程图,如图1所示,主要包括以下步骤:
步骤(1),局部非线性模型实验:局部非线性实验流程图,如图2所示。首先设定工作点变量值;在工作点变量值保持恒定的前提下,设定控制变量在工作区间的取值;然后通过输入模块遍历所有控制变量(MV)在各自工作区间的取值,从输出模块获取所针对的一个被控变量(CV)的稳态输出数据;如果控制变量(MV)数量多于一个,当通过输入模块遍历某个控制变量在其工作区间的取值时,其他控制变量保持不变;最后将激励信号通过输入模块施加于辨识对象的所有控制变量(MV),从输出模块获取所述所针对的一个被控变量(CV)的动态输出数据;
步骤(2),辨识局部非线性模型:所述系统辨识模块采用步骤(1)所获的稳态输出数据和动态输出数据通过非线性辨识方法来估计局部非线性模型的参数,自动完成局部非线性模型的辨识,获得步骤(1)所设定工作点变量值的局部非线性模型;所述的局部非线性模型可以是基于非参数模型的辨识(如基于神经网络的辨识方法,基于模糊函数的辨识方法等),也可以是基于Hammerstein或者wiener参数模型或非参数和参数混合结构的系统辨识,能把非线性和线性参数变化领域已有的成果很好的结合进去。当采用所述基于非参数模型的辨识时,直接采用最小二乘方法对所需全部工作点变量值的局部非线性模型进行插值操作,无需对稳态的归一化非线性部分进行三角权值函数加权操作。所述基于Hammerstein非参数与参数混合模型的系统辨识可以采用非线性混合Hammerstein模型的结构,该结构由稳态归一化的直接线性反馈神经网络(DLF)和线性部分模型构成。归一化其它任意基于Hammerstein或者wiener参数或参数和非参数混合模型的稳态非线性部分,即可采用基于非线性混合Hammerstein模型辨识方法相同的操作步骤获得非线性参数变化(NPV)模型。因此本实施例采用非线性混合Hammerstein模型结构为例来阐述具体操作步骤,非线性混合Hammerstein模型结构如图4和图5。假设多输入单输出系统是m输入单输出系统,非线性混合Hammerstein模型结构的表达式如下:
Y(t)=G1(q,δ(t))×f1[δ(t),u1(t)]+...+Gm(q,δ(t))×fm[δ(t),um(t)]+v(t) (1)
其中
Gi(q,δ(t))是从中间变量X(t)到被控变量Y(t)的传递函数。q-1是延迟算子,n是模型阶次,d是纯迟延,v(t)是一个均值为零的随机噪声。fi[δ(t),ui(t)]是随工作点变量δ(t)变化的归一化的稳态非线性函数,表达稳态非线性增益变化趋势。归一化的非线性函数f(.)用直接线性反馈神经网络拟合(DLF),具体结构可以参照图4。获得非线性混合Hammerstein模型的操作如下:
1)稳态的归一化直接线性反馈神经网络(DLF)的训练,这部分描述的是对象的稳态非线性特性。在获得多输入单输出过程在该工作点变量值的各输入输出稳态数据(可以通过实验测取)后,首先归一化稳态输出数据,并用归一化后的输出数据和输入数据对X(t)=WU(t)线性代数方程组进行拟合,这将起到粗略拟合的作用,所述U(t)为稳态输入数据,所述W为常系数,所述X(t)为中间变量。然后计算对象归一化后的稳态输出与WU(t)之间的差值E(t),再将差值E(t)与实测稳态输入U(t)来训练多层前向BP神经网络映射。
2)线性部分模型的辨识,在获得实际对象所有输入输出之间的动态数据{U(t)},{Y(t)}后,利用已获得的稳态DLF网络模型,将所有输入数据{U(t)}转换为中间变量{X(t)},以中间变量{X(t)}和动态输出数据{Y(t)}作为线性部分的输入数据和输出数据,采用线性辨识方法(例如渐进辨识法、预测误差方法)来确定线性部分模型的参数。
步骤(3),重复上述步骤(1)、(2),自动完成所需全部工作点变量值的局部非线性模型的辨识获得所需全部工作点变量值的局部非线性模型,所述所需全部的工作点变量值包括工作点变量的工作区间的上限与下限;
采用上述的非线性混合Hammerstein模型的辨识方法所获得的三个多输入单输出局部非线性模型可记为
然后检验局部非线性模型是否满足所需要的精度阈值,当不满足时,调整控制变量在工作区间的取值或/和调整激励信号,回至步骤(1);否则,继续;
步骤(4),工作点变量过渡实验:工作点变量过渡实验流程图,如图3所示。所述的工作点变量过渡为通过输入模块将辨识对象从一个工作点变量值过渡到另一个工作点变量值的过程。在工作点变量过渡实验中,改变工作点变量值,并将激励信号通过输入模块施加于辨识对象的控制变量(MV),从输出模块获取所述所针对的一个被控变量(CV)的工作点变量过渡动态数据;
步骤(5),辨识多输入单输出非线性参数变化模型:对所需全部工作点变量值的局部非线性模型进行插值操作,以使局部非线性模型转化为多输入单输出非线性参数变化(NPV)模型,插值操作中用到的权值函数由包括局部非线性模型实验数据和工作点变量过渡实验数据的全部实验数据,通过参数辨识来确定。所述局部非线性模型实验数据包括在局部非线性模型实验中的控制变量(MV)的动态输入数据和所针对的被控变量(CV)的动态输出数据;所述工作点变量过渡实验数据包括在工作点变量过渡实验中的工作点变量值、控制变量(MV)的动态输入数据和所针对的被控变量(CV)的动态输出数据;所述对所需全部工作点变量值的局部非线性模型进行插值操作,构建多输入单输出非线性参数变化(NPV)模型的方法,则包含以下步骤:
1)首先对所需全部工作点变量值的局部非线性模型的归一化的直接线性反馈神经网络(DLF),用三角权值函数进行加权处理。本实施例中采用三角权值补偿(权值大小同工作点离三个设定工作点变量值δ1、δ2、δ3的距离成正比),补偿方法虽然简单,但远远好于使用平均权值,对于工业中大部分的对象的非线性趋势变化有一定的补偿作用。具体操作如下:
其中三角权值函数为
2)然后根据已经得到所需全部工作点变量值的局部非线性模型,通过权值函数对包括局部非线性模型实验数据和工作点变量过渡实验数据的全部实验数据进行曲线拟合,采用最小二乘方法估计出权值函数的参数。
用一个操作运行轨迹模型来近似公式(1)、(2)中的多输入单输出非线性参数变化模型:
这里权值函数η1(δ)、η2(δ)和η3(δ)是工作点变量δ的函数。公式(6)中多输入单输出非线性参数变化模型是所需全部的工作点变量值的非线性混合Hammerstein模型插值而来的,而η1(δ)、η2(δ)和η3(δ)可称为插值的权值函数。
假设在每两个邻近的工作点变量值之间,增益和时间常数等作为工作点变量δ的单调函数而随之变化,那么多输入单输出非线性参数变化的模型(1)可以用公式(6)中简化的模型进行很好的近似。
权值函数是工作点变量的非线性函数,权值函数采用样条函数、指数函数或多项式函数。
以三次样条函数为例,三次样条权值函数表达式如下:
三个权值函数采用相同的节点{p1,p2,...,ps},节点的选取可以平均或不平均地分布到整个工作区间。
δmin=p1<p2<...<ps=δmax (8)
插值操作中用到的权值函数由包括局部非线性模型实验数据和工作点变量过渡实验数据在内的全部实验数据,通过最小二乘方法估计得到的:
并定义eOE(t)为公式(6)中输出误差:
其中
参数估计的具体操作如下:
Y(t)=[y(1),y(2),...,y(N)]T,N为采集的总点数。
非线性参数变化模型辨识方法(NPV)专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()
















动态评分
0.0