







专利摘要
本发明公开了一种全轮同相位驱动小车及其转弯控制方法,包括小车本体及若干个设置在小车本体上的圆轮,所述圆轮为偶数个且至少为四个,所述圆轮两两通过驱动部件对称设置在小车本体两侧;各所述圆轮上均匀分布有若干段大摩擦力圆弧段,相互对称设置的两个圆轮上的大摩擦力圆弧段互补并可形成一个整圆,位于小车本体同一侧圆轮上的大摩擦力圆弧段相位相同;利用小车本体两侧圆轮所产生的摩擦力不同以及小车本体在变速时车身会有偏斜现象,实现小车转向。该驱动小车整体结构简洁可靠,具有效率高、地表适应性好、越障能力强的特点,可供移动机器人、越障车等需要在非平整地面和平整地面行走的移动设备使用。
权利要求
1.一种全轮同相位驱动小车,其特征在于:包括小车本体及若干个设置在小车本体上的圆轮,所述圆轮为偶数个且至少为四个,所述圆轮两两通过驱动部件对称设置在小车本体两侧;各所述圆轮上均匀分布有若干段大摩擦力圆弧段,相互对称设置的两个圆轮上的大摩擦力圆弧段互补并可形成一个整圆,位于小车本体同一侧圆轮上的大摩擦力圆弧段相位相同。
2.根据权利要求1所述的全轮同相位驱动小车,其特征在于:相邻驱动部件间通过传动装置相连接。
3.根据权利要求2所述的全轮同相位驱动小车,其特征在于:所述驱动部件主要由转动轴及驱动源组成,两两对称的圆轮通过转动轴连接并由驱动源驱动。
4.根据权利要求3所述的全轮同相位驱动小车,其特征在于:所述传动装置为传送带,所述传送带两端对应套装在两组相邻驱动部件的驱动源上。
5.一种控制权利要求1~4任一项所述全轮同相位驱动小车转弯的方法,其特征在于包括以下步骤:
(1)保证小车本体上对称设置的两个圆轮相位互补且各圆轮间的相对相位固定不变;
(2)控制小车加速或减速,使小车本体两侧产生相对滑移。
6.根据权利要求5所述的全轮同相位驱动小车转弯控制方法,其特征在于包括左转向控制:小车本体加速时,右侧圆轮上的大摩擦力圆弧段与地面接触,左侧圆轮与右侧圆轮相位互补;小车本体减速时,左侧圆轮上的大摩擦力圆弧段与地面接触,右侧圆轮与左侧圆轮相位互补。
7.根据权利要求5所述的全轮同相位驱动小车转弯控制方法,其特征在于包括右转向控制:小车本体加速时,左侧圆轮上的大摩擦力圆弧段与地面接触,右侧圆轮与左侧圆轮相位互补;小车本体减速时,右侧圆轮上的大摩擦力圆弧段与地面接触,左侧圆轮与右侧圆轮相位互补。
说明书
技术领域
本发明属于机器人领域,具体涉及一种全轮同相位驱动小车及其转弯控制方法。
背景技术
随着我国先进技术的发展,智能轮式机器人的研究变得越来越热门,其应用也越来越广泛,价值亦愈加显著。近年来出现的万用拖轮(三角轮)、各种越障轮以及圆轮与其它形式混合的行走机构使得圆轮开始脱离硬质平坦地面而走进复杂地形。因此,研究一种能够在复杂地形中行走自如、功能强大、轻便简洁的轮式移动机器人成为其应用推广需要克服首要难关。
现有资料表明,圆轮同相位有利于攀爬越障,特别适合在复杂环境中行走。对于轮式移动机器人,如果其所有圆轮都同相位(即全轮同相),其攀爬越障能力将会大大增强。因为全轮同相移动机器人在任一圆轮有抓地力的时候,可获得全部扭矩,有利于跨越障碍。然而全轮同相会带来转弯困难的问题,如果引入像汽车转向架一类的高级转弯方式,必将降低机器人的强度,增加结构复杂度,也会增加能量功耗的负担,违背了轻便简洁的宗旨。
发明内容
有鉴于此,本发明的目的在于提供一种全轮同相位驱动小车及其转弯控制方法,在不引入转向架等复杂转弯方式的情况下解决了全轮同相下转弯复杂困难的问题。
为达到上述目的,本发明提供如下技术方案:一种全轮同相位驱动小车,包括小车本体及若干个设置在小车本体上的圆轮,所述圆轮为偶数个且至少为四个,所述圆轮两两通过驱动部件对称设置在小车本体两侧;各所述圆轮上均匀分布有若干段大摩擦力圆弧段,相互对称设置的两个圆轮上的大摩擦力圆弧段互补并可形成一个整圆,位于小车本体同一侧圆轮上的大摩擦力圆弧段相位相同。
进一步,相邻驱动部件间通过传动装置相连接。
进一步,所述驱动部件主要由转动轴及驱动源组成,两两对称的圆轮通过转动轴连接并由驱动源驱动。
进一步,所述传动装置为传送带,所述传送带两端对应套装在两组相邻驱动部件的驱动源上。
本发明还提供一种上述全轮同相位驱动小车的转弯控制方法:
包括以下步骤:
(1)保证小车本体上对称设置的两个圆轮相位互补且各圆轮间的相对相位固定不变;
(2)控制小车加速或减速,使小车本体两侧产生相对滑移。
进一步,包括左转向控制:小车本体加速时,右侧圆轮上的大摩擦力圆弧段与地面接触,左侧圆轮与右侧圆轮相位互补;小车本体减速时,左侧圆轮上的大摩擦力圆弧段与地面接触,右侧圆轮与左侧圆轮相位互补。
进一步,包括右转向控制:小车本体加速时,左侧圆轮上的大摩擦力圆弧段与地面接触,右侧圆轮与左侧圆轮相位互补;小车本体减速时,右侧圆轮上的大摩擦力圆弧段与地面接触,左侧圆轮与右侧圆轮相位互补。
本发明的有益效果在于:
(1)本发明将相位控制及电机驱动(加减速)进行合理配合,既保留了全轮同相越障能力强的优势,又攻克了全轮同相转弯困难的问题,可以在各行动轮完全同相位的情况下,实现正常的前进、后退、左转及右转,具有很强的实用性。
(2)结构整体简洁可靠,具有效率高、地表适应性好、越障能力强的特点,可供移动机器人、越障车等需要在非平整地面和平整地面行走的移动设备使用。
(3)当小车本体以匀速率或者较为平缓地在平坦地面上加减速行走时,车体宏观上直线行走;在需要转弯时,根据圆轮的相位状态进行急加速或者急减速,即可达成转向效果。在非平坦地面行走时,由于圆轮同相,可以将轮式车辆的越障性能发挥到极致。
附图说明
为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
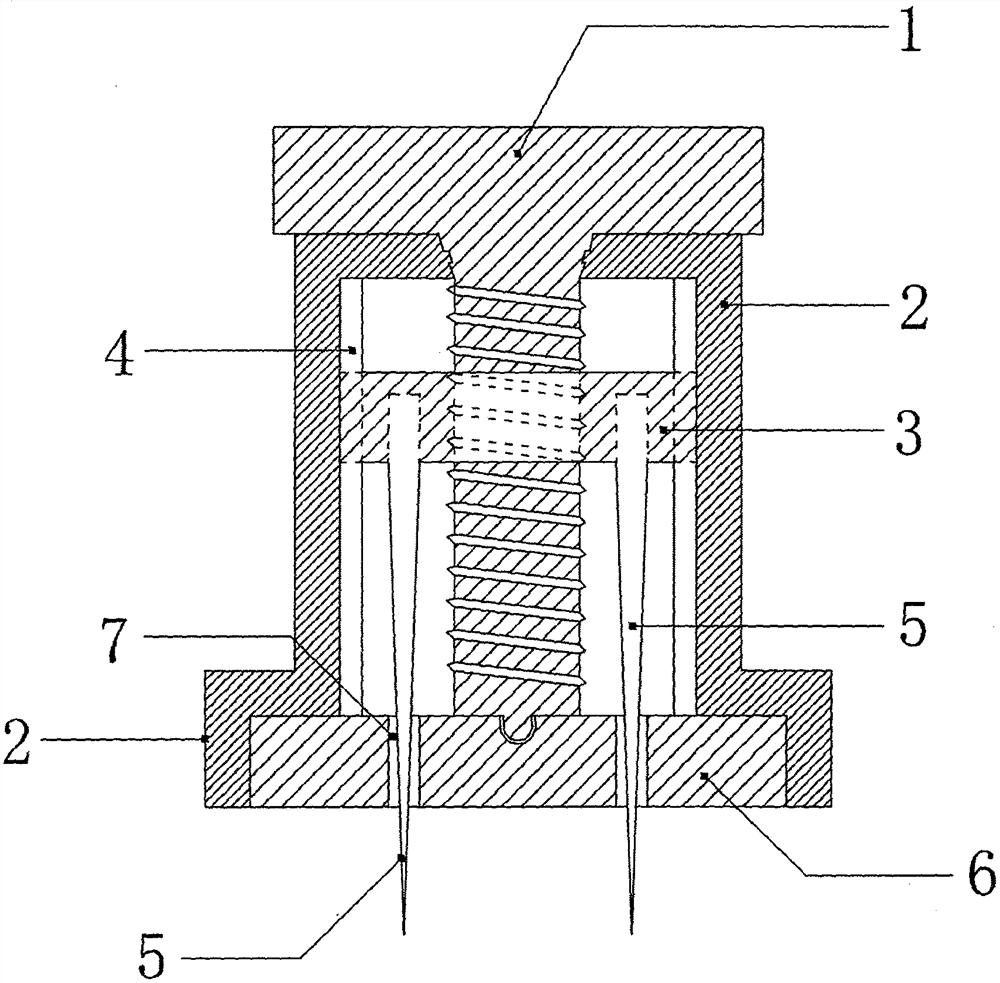
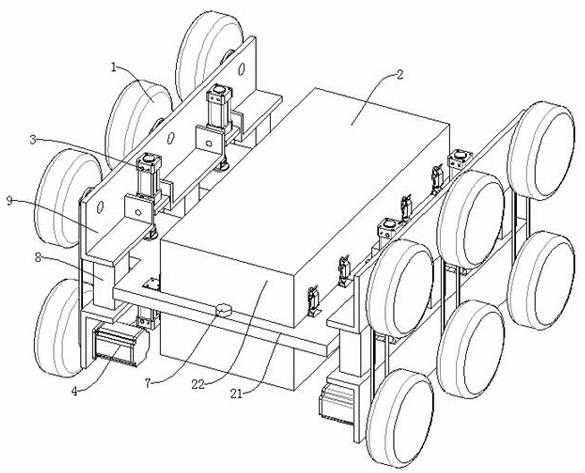
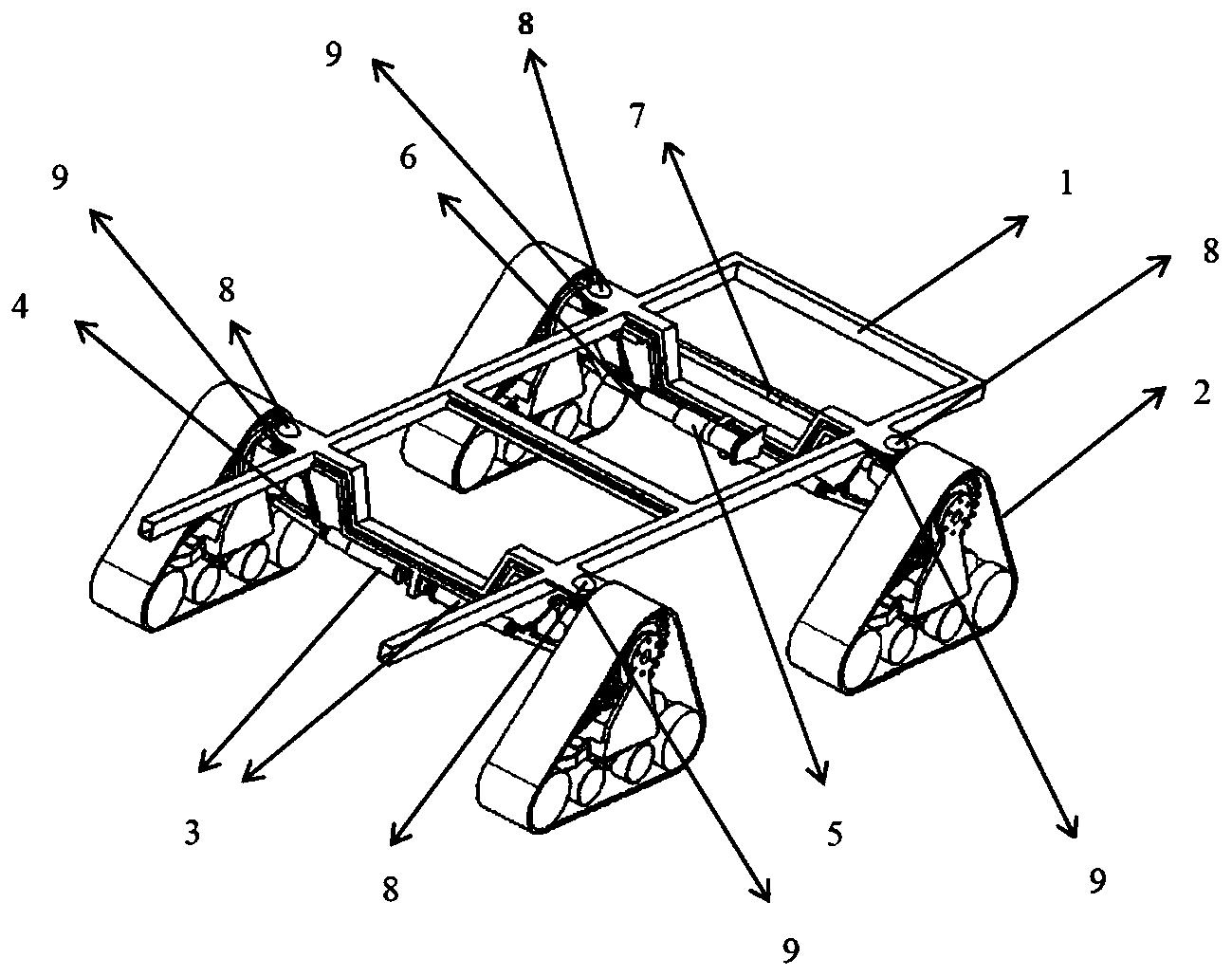
图1为本发明的结构示意图(六轮结构);
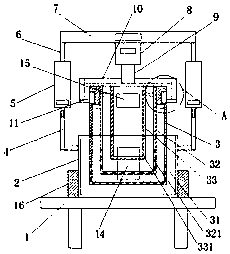
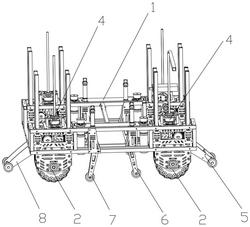
图2为本发明的结构示意图(四轮结构);
图3为加速左转状态示意图;
图4为减速左转状态示意图;
图5为加速右转状态示意图;
图6为减速右转状态示意图。
具体实施方式
下面将结合附图,对本发明的优选实施例进行详细的描述。
如图1所示,本发明中的全轮同相位驱动小车,包括小车本体1及六个设置在小车本体1上的圆轮2-1、2-2、2-3、2-4、2-5与2-6,所述圆轮两两通过驱动部件3对称设置在小车本体1两侧,即一侧安装有圆轮2-1、2-2及2-3,另一侧安装有圆轮2-4、2-5及2-6。各所述圆轮上均匀分布有若干段大摩擦力圆弧段21,相互对称设置的两个圆轮上的大摩擦力圆弧段21互补并可形成一个整圆,位于小车本体1同一侧圆轮上的大摩擦力圆弧段21相位相同。即圆轮2-1、2-2及2-3上的大摩擦力圆弧段21相位相同,圆轮2-4、2-5及2-6上的大摩擦力圆弧段21相位相同,圆轮2-1、2-2、2-3对应与圆轮2-4、2-5及2-6上的大摩擦力圆弧段21互补。
具体的,未设有大摩擦力的圆弧段对应为小摩擦力圆弧段22(图中小摩擦力圆弧段22为圆轮上的浅色区,大摩擦力圆弧段21为圆轮上的深色区)。由于圆轮上不同相位区间的摩擦力不同,而同侧的圆轮相位相同,两侧圆轮相位相互补,因此,在同一时间,小车本体1两侧圆轮所产生的摩擦力不同;而小车本体1在变速时车身会有偏斜现象,在偏斜的车身与两侧不同摩擦力共同作用下,即可完成小车转向。
本发明中相邻驱动部件3间通过传动装置4相连接,即圆轮(2-1、2-4)的驱动部件3与圆轮(2-2、2-5)的驱动部件通过传动装置4相连接,圆轮(2-2、2-5)的驱动部件还与圆轮(2-3、2-6)的驱动部件相连接。驱动部件3通过传动装置4将所有圆轮连接,严格保证了相对相位的固定不变。
本发明中的驱动部件3主要由转动轴31及驱动源32组成,两两对称的圆轮通过转动轴31连接并由驱动源32驱动。其中,驱动源可为电机。
本发明中的传动装置4为传送带,所述传送带两端对应套装在两组相邻驱动部件的驱动源32上。
控制该全轮同相位驱动小车的进行转弯的方法,包括以下步骤:
(1)保证小车本体1上对称设置的两个圆轮相位互补且各圆轮间的相对相位固定不变;
(2)控制小车加速或减速,使小车本体1两侧产生相对滑移。
以圆轮顺时针旋转,右前进状态为基础进行说明。
具体的,左转向控制:小车本体1加速时,右侧圆轮上的大摩擦力圆弧段与地面接触,左侧圆轮与右侧圆轮相位互补;小车本体1减速时,左侧圆轮上的大摩擦力圆弧段与地面接触,右侧圆轮与左侧圆轮相位互补。
右转向控制:小车本体1加速时,左侧圆轮上的大摩擦力圆弧段与地面接触,右侧圆轮与左侧圆轮相位互补;小车本体1减速时,右侧圆轮上的大摩擦力圆弧段与地面接触,左侧圆轮与右侧圆轮相位互补。
如图2所示,以某一四轮小车为例,该小车本体1上设有四个圆轮2-1、2-2、2-3与2-4,各圆轮上均有半周大摩擦力圆弧段21,另外半周为小摩擦力圆弧段22;其中,圆轮2-1与圆轮2-4同轴连接且相位互补,圆轮2-2与圆轮2-3同轴连接且相位互补。当圆轮2-1的大摩擦力圆弧段21处于高半周而小摩擦力圆弧段22处于低半周时,圆轮2-4的大摩擦力圆弧段21处于低半周而小摩擦力圆弧段22处于高半周,由于圆轮2-1、2-2的相位完全相同,且前、后轮上的转动轴31通过传送带相连,进一步保证了四个圆轮相对相位的固定。因此,小车可在不同模式下实现车体偏转。
以下的原理说明均以圆轮顺时针旋转,即前进状态为基础,如图3、4、5、6所示。
正常行驶时,由于加速度的绝对值较低,两侧圆轮都没有突破静摩擦力的极限,因此所产生的静摩擦力相同,两侧均无滑移,车体保持直线行驶。
当加速度的绝对值足够大,小车本体1两侧或者一侧的的圆轮突破静摩擦力极限时,圆轮发生滑移。其中,小摩擦力圆弧段22处于低半周的一侧,其与地面间的摩擦力较小而首先突破静摩擦力的极限,同时,另一侧的大摩擦力圆弧段21处于低半周的一侧,其受到摩擦力较大。当小摩擦力一侧发生滑移、大摩擦力一侧不发生滑移时,车体会发生转向。同理,两侧都发生滑移时,因两侧所受到的摩擦力不同,车体同样会产生转向。
向左转时:
(1)加速模式下,当左侧圆轮的小摩擦力圆弧段22处于低半周,由于相位互补,右侧圆轮的大摩擦力圆弧段21处于低半周,此时急剧加速,一侧(必为小摩擦低半周侧)或者两侧都突破静摩擦极限时,圆轮与地面间发生滑移,使得车体左转。如图3所示。
(2)减速模式下,当左侧圆轮的大摩擦力圆弧段21处于低半周,由于相位互补,右侧圆轮的小摩擦力圆弧段22处于低半周,此时急剧减速,一侧或者双侧会突破静摩擦极限,圆轮与地面间发生滑移,使得车体左转。如图4所示。
向右转时:
(1)加速模式下,当左侧圆轮的大摩擦力圆弧段21处于低半周,由于相位互补,右侧圆轮的小摩擦力圆弧段22处于低半周,此时急剧加速,一侧(必为小摩擦低半周侧)或者两侧都突破静摩擦极限时,圆轮与地面间发生滑移,使得车体右转。如图5所示。
(2)减速模式下,当左侧圆轮的小摩擦力圆弧段22处于低半周,由于相位互补,右侧圆轮的大摩擦力圆弧段21处于低半周,此时急剧减速,一侧或者双侧会突破静摩擦极限,圆轮与地面间发生滑移,使得车体右转。如图6所示。
该小车机构,既不失平坦地面行走的效率,又兼顾了越障性能。当小车本体1以匀速率或者较为平缓地在平坦地面上加减速行走时,车体宏观上直线行走;在需要转弯时,根据圆轮的相位状态进行急加速或者急减速,即可达成转向效果。在非平坦地面行走时,由于圆轮同相,可以将轮式车辆的越障性能发挥到极致。
最后说明的是,以上优选实施例仅用以说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
一种全轮同相位驱动小车及其转弯控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0