





专利摘要
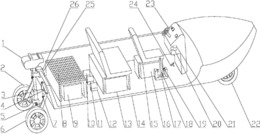
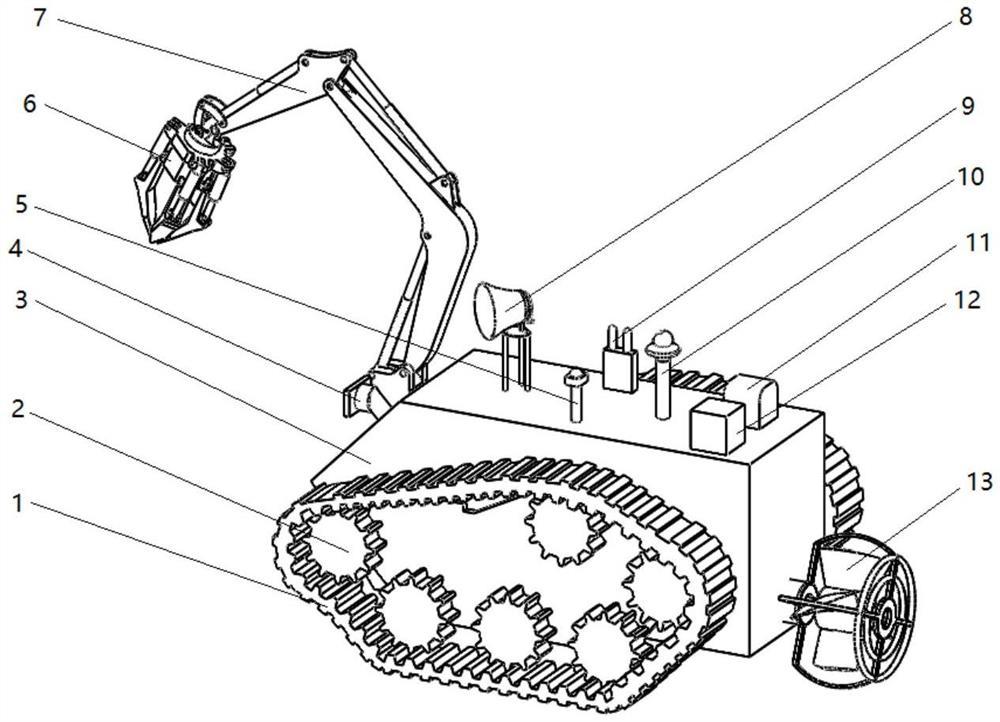
本实用新型涉及巡航作业领域,具体的说是一种两栖巡航作业机器人,包括壳体、浮力调节单元、路上行走单元、姿态调节单元、控制单元和采样单元;壳体起到保护内部构件和美化装置的作用;陆地行走单元的机构设计使其可适应于较多的环境状况,在越障方面有其自身的优势;姿态调节单元两侧的螺旋桨绕轴圆周旋转调节螺旋桨的喷水方向,实现了其水下的侧身等动作,在一些狭窄的环境中具有较好的通过性;控制单元是整个装置的大脑,负责控制该装置正常运行,对外界信息作出反馈;采样装置工作时,机械臂夹取样品放入载物盒中,使用者可以根据自己的采样种类自行在机械臂的末端加装末端执行器,从而使得机械臂可实现不同的作用,从而提高工作效率。
权利要求
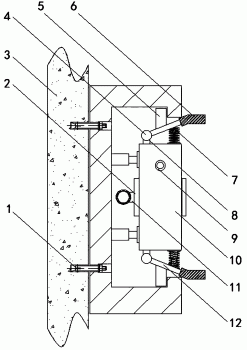
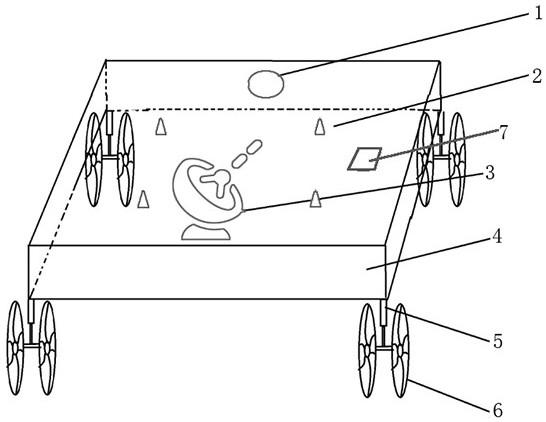
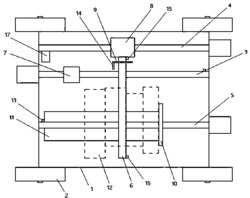
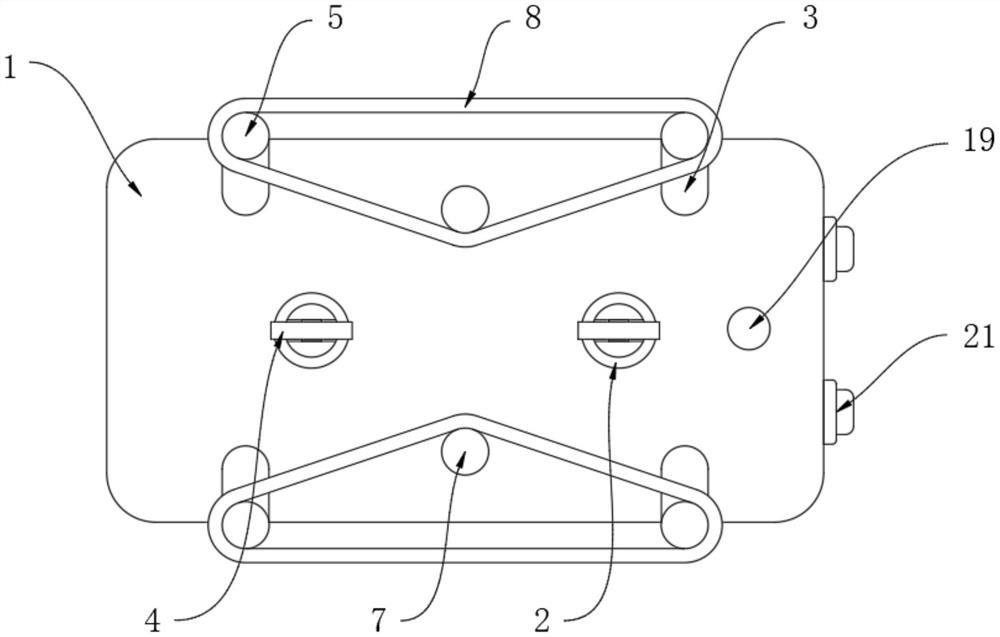
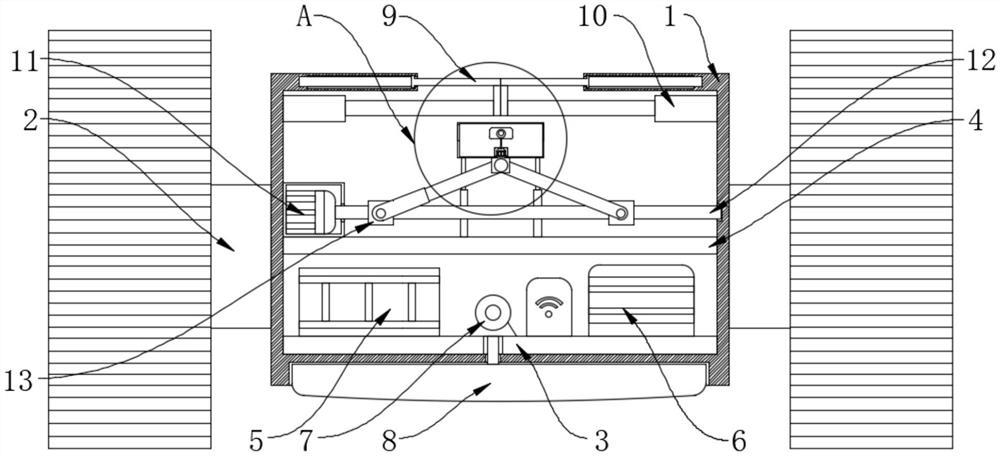
1.一种水陆两栖巡航作业机器人,其特征在于:包括壳体(1)、浮力调节单元(2)、路上行走单元(3)、姿态调节单元(4)、控制单元和采样单元(6);所述的壳体(1)由上壳体(11)和下壳体(12)组成;所述的浮力调节单元(2)位于上壳体(11)和下壳体(12)中间;所述的路上行走单元(3)位于壳体(1)左右两侧,每侧均有两个路上行走单元(3);所述的姿态调节单元(4)有两个位于每侧两个的路上行走单元(3)之间和壳体(1)的两侧,还有一个位于壳体(1)后方;所述的控制单元位于浮力调节单元(2)的下方;所述的采样单元(6)位于壳体(1)的前方。
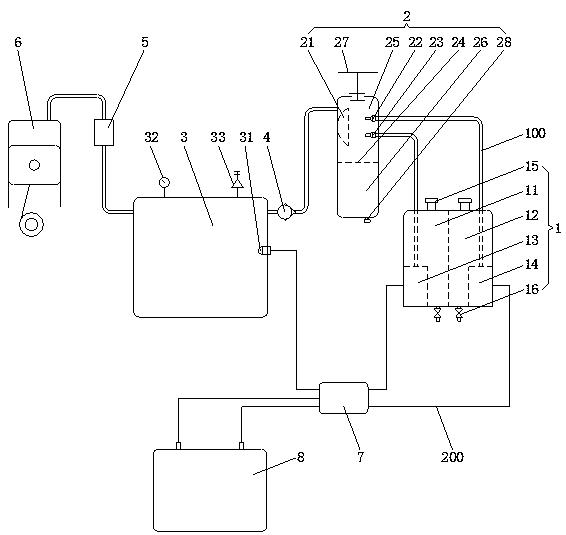
2.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的浮力调节单元(2)包括后置水箱(21)、前置水罐(28)以及两者中间的进/排气口(22)、管道(23)、三位三通换向阀(24)、气泵(25)、储气罐(26)、电磁阀(27)和进/排水口(29);所述的进/排气口(22)位于后置水箱(21)和前置水罐(28)的中间靠上方;所述的管道(23)位于两水箱中间,且前后分别连接后置水箱(21)和前置水罐(28),上方与进/排气口(22)相连接,下方与三位三通换向阀(24)、气泵(25)、储气罐(26)和进/排水口(29)相连接;储气罐(26)位于后置水箱(21)和前置水罐(28)之间且偏右;三位三通换向阀(24)和气泵(25)位于后置水箱(21)前方并与后置水箱(21)相接触;进/排水口(29)位于后置水箱(21)和前置水罐(28)中间偏下。
3.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的路上行走单元(3)包括履带(31)、主动轮(32)、轴承(33)、锥齿轮传动(34)、传动电机(35)、引导轮(36)和传动轮(37);所述的主动轮(32)和引导轮(36)位于履带(31)内侧;所述的轴承(33)和传动电机(35)位于主动轮(32)内侧;所述的传动电机(35)位于路上行走单元(3)的内侧。
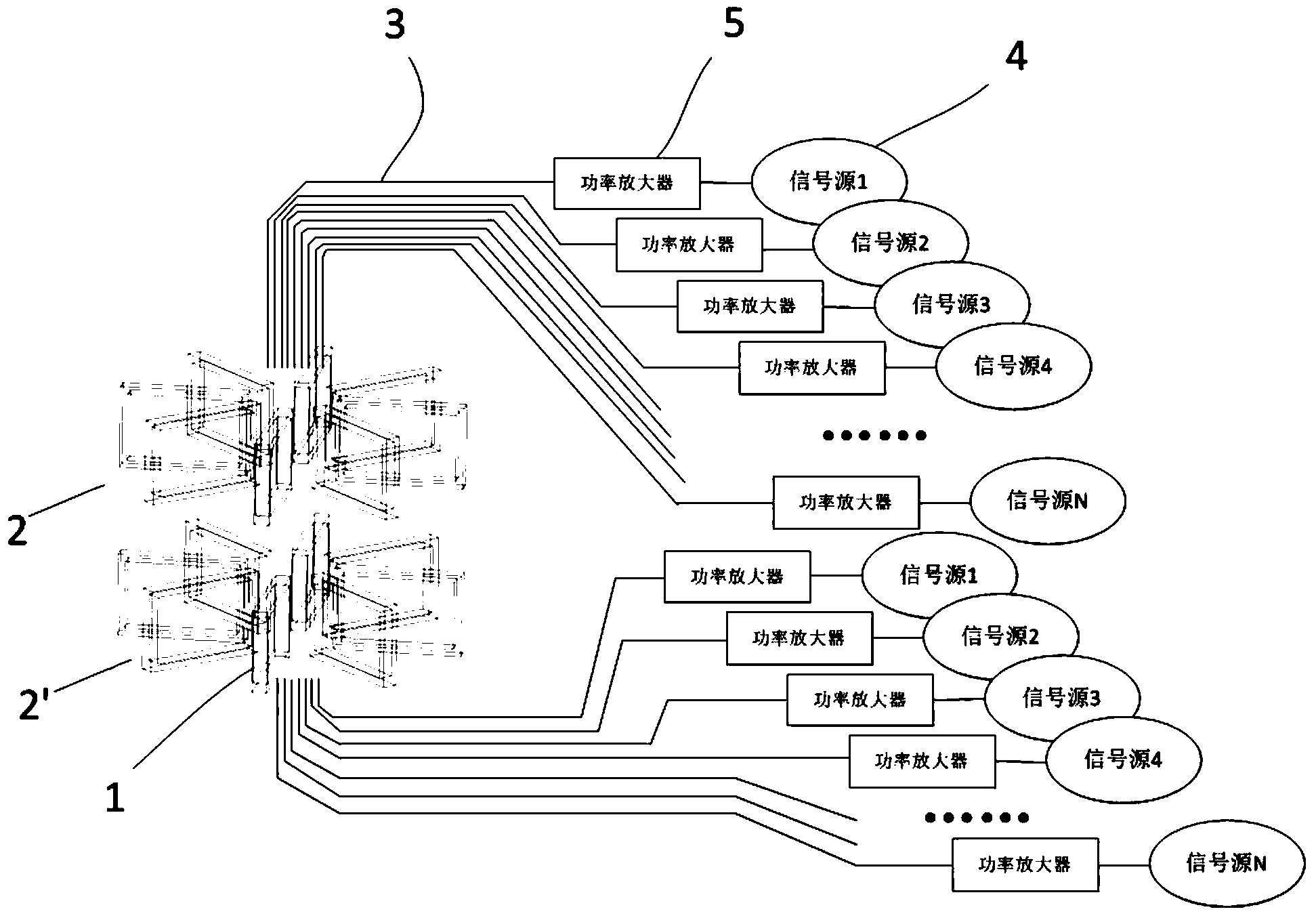
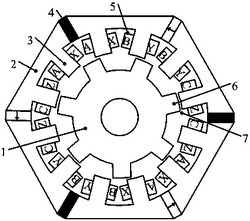
4.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的姿态调节单元(4)包括机翼(41)、旋转电机(42)、整流罩(43)、扇叶(44)、推进电机(45)、轮带(46)和齿轮(47);旋转电机(42)位于机翼(41)内部,整流罩(43)与机翼(41)相连接,扇叶(44)位于整流罩(43)内部,推进电机(45)与扇叶(44)相固连;旋转电机(42)通过轮带(46)和齿轮(47)带动整流罩(43)转动。
5.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的控制单元位于气泵(25)正下方。
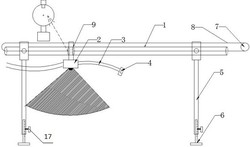
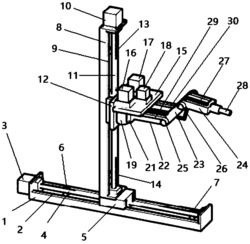
6.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的采样单元(6)包括左机械臂(61)、右机械臂(62)和载物盒(63);左机械臂(61)和右机械臂(62)与上壳体相固连;载物盒(63)与下壳体相固连。
7.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的浮力调节单元(2),通过控制三位三通换向阀(24)改变通道的联通情况,使得进/排气口(22)与气泵(25)相连,这时气泵(25)可以从外界抽取空气压缩进储气罐(26)中,进而补充储气罐(26)中高压气体的消耗;若通过控制三位三通换向阀(24)使得固定装置与气泵相连,可以通过控制气泵的转向进而控制固定装置的工作状态。
8.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的路上行走单元(3),该行走机构的特点在于只具备一个自由度即只能绕与机体相连的传动轴进行旋转。
9.根据权利要求1所述的一种水陆两栖巡航作业机器人,其特征在于:所述的采样单元(6),使用者可以根据自己的采样种类自行在机械臂的末端加装末端执行器,从而使得机械臂可实现不同的作用。
一种水陆两栖巡航作业机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0