







专利摘要
一种基于人体重心变化的自学习轮椅控制方法属于模式识别与智能系统领域。本发明.在轮椅座椅与架构间安装压力传感器,采集人体坐姿下的受力分布,计算二维重心坐标,并将实时重心数据保存到嵌入式计算机中;依据常规的SOFM算法的基本学习过程,对包括输出层神经元数目、网络初始权值以及网络邻域半径调整规则等进行了算法优化,降低运算复杂度,提高算法在应用中的计算实时性,实现控制算法因人而异的目的。利用改进后的SOFM算法,在驾驶习惯学习过程中,SOFM聚类算法收敛速度和学习效率得到大幅度提高,提升了算法的实时性和聚类正确率,满足轮椅实时学习控制的要求,消除了因用户驾驶习惯不同带来的手动调整参数过于繁琐的问题。
权利要求
1.基于人体重心变化的自学习轮椅控制方法,其特征在于,包括以下步骤:
(1).在轮椅座椅与架构间安装压力传感器,采集人体坐姿下的受力分布,计算二维重心坐标,并将实时重心数据保存到嵌入式计算机中;
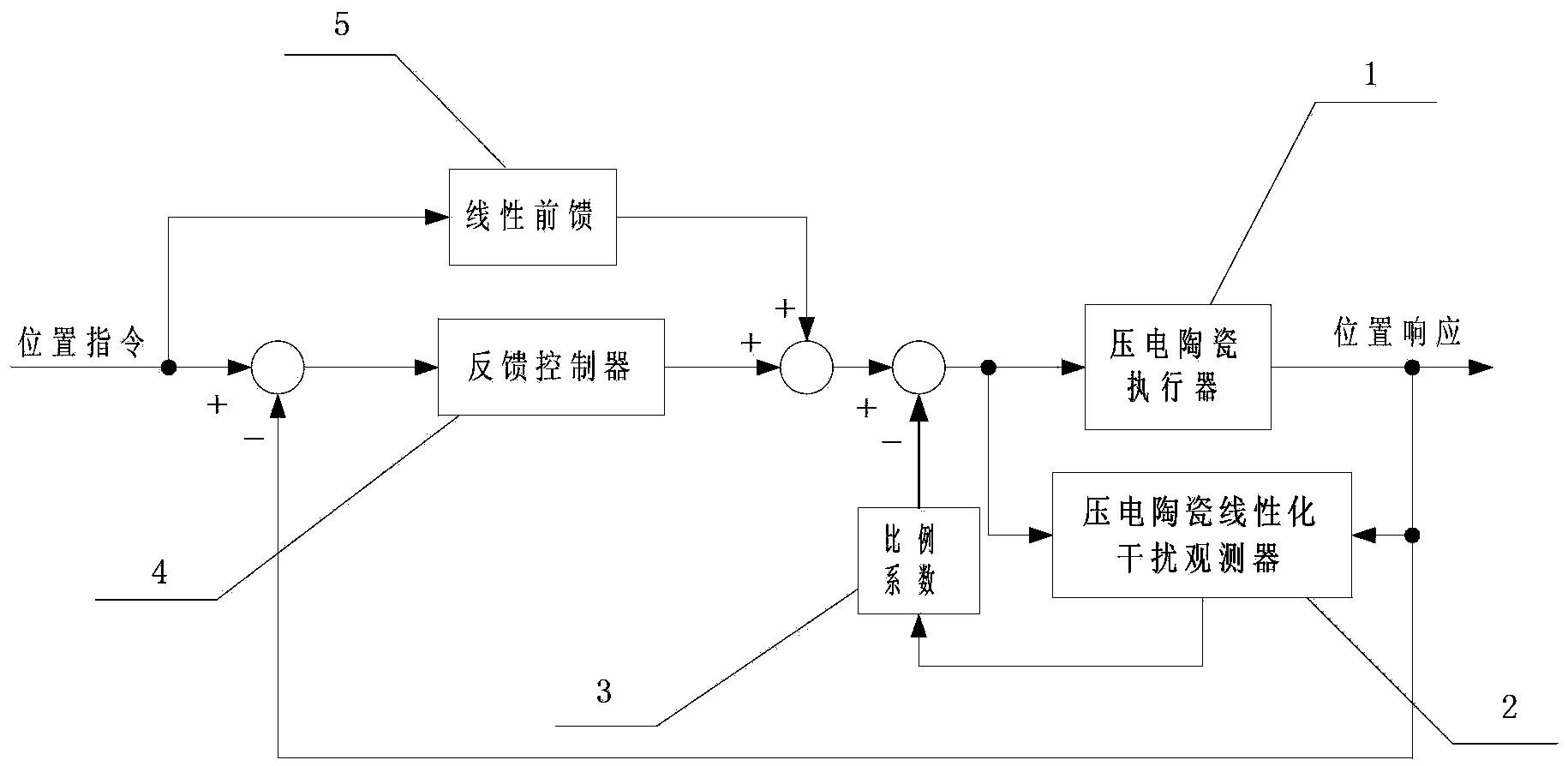
(2).设计参数自适应式的模糊控制器,将计算得到的重心信息作为控制器输入量,通过改进的SOFM神经网络算法,根据乘用者的驾驶特点进行自学习,并根据学习结果自动调整控制器相关参数,输出轮椅的实际运动方向和速度;
具体步骤如下:
1)利用数据采集实现各点压力实时采集并计算重心坐标后,计算获取的重心点坐标变化的速度和加速度,将两者同时输入二维模糊控制器;
2)利用改进的SOFM学习算法自主调整模糊控制规则,实现模糊自适应控制;
将重心坐标变化参数即速度v和加速度a输入模糊控制器,模糊控制器的输出为轮椅的实时运动速度Vx和Vy;
将人体上身坐姿重心变化情况分为9类,即前倾、后倾、左倾、右倾、左前倾、右前倾、左后倾、右后倾和正坐无倾斜;
依据SOFM算法的基本学习过程,对包括输出层神经元数目m、网络初始权值以及网络邻域半径调整规则进行了算法优化,降低运算复杂度;
①在SOFM神经网络中,若输入层神经元数目为n,输出层神经元数目为m,则层之间的连接共计n×m个连接权值;
输出层神经元数目,即取为:m=C+0.7N0+λ;其中,m为欲选取的输出层神经元数目;C为输入样本类别,即期望聚类数目,期望聚类结果为9类典型上身动作,因此取C=9;N0为选取的输出层初始邻域所包含的神经元节点数目,选取N0 大于或等于C;且由于m为输出层神经元数目,需按照 “整数行数×整数列数” 的输出层数目进行取值,因此将λ设为初始修正取整参数;
②初始权值的选取优化;
若一个SOFM网络的输入层节点数为n,输出层节点数为m;其第l个输入样本向量即重心坐标向量为{Gl1,Gl2,…,Gli,…,Gln};输入样本向量类分别记为:{c1, c 2, …, cp, …, cr},其中r为每组输入样本向量中所包含的预期聚类数量最大值,即本发明实施例中重心坐标向量为{Gl1,Gl2},样本最多聚类数为9类,其中c1— c9对应的9类典型动作,故取r=9;
若设r个聚类动作中任意一个聚类为cp,则第p个聚类中对应的重心坐标数目为k个,在这k个坐标值中,对于输入层的n个节点中的第i个节点而言,若该类别在此节点上的 分量坐标为Cp_i_G,则有:
其中q∈{1,2,...,k} (7)
其中k为第p个聚类中的样本个数,i为输入层节点序号,q为[1,k]之间自然数序列;则SOFM网络初始连接权值wi_j按如式(8)确定;Gi_q表示重心坐标的x坐标和y坐标值;
wi_j=Cp_i_G+ε,其中i∈{1,2,...n} (8)
其中,j为输出层节点序号,j∈{1,2,…,m};m为输出层节点数目,ε为均衡参数,取ε∈[-1,1],作用对初始连接权值进行只保留到小数点后一位的取整操作;
按上述方法进行计算,可分别得到w1_1至w2_m即输入层n个节点与输出层m个节点之间各神经元节点间的全部连接权值初始值wi_j;
③邻域调整优化方法;
邻域范围调整按简化的五段分段函数计算,如式(9)所示;
其中,Nj(E)表示获胜神经元j的邻域,Nj(E0)为初始邻域,取为重心坐标样本数的类别数C,即Nj(E0)=9;E为当每组输入样本通过网络后,赢得此样本的输出层神经元权值与该组输入样本的绝对值距离之和;E0为初始误差,EG为目标误差;
3)改进后的SOFM算法计算流程:
①初始化各连接权值,按照式(8)方式进行初始连接权值确定;
②将输入样本向量输入到网络的输入层中;
③按式(10)计算输入第l组向量 与输出层m个节点间的距离dj:
其中 为人体重心的二维坐标数据样本;
④计算满足最小距离的输出层神经元c与样本间距离,使其对于任意的输出层神经元节点j,有:
⑤按照式(9)确定类别c对应的邻域Nj(E)范围;
⑥按式(12) 分别计算调整输出层获胜神经元c及其邻域Nj(E)内的节点所连接的权值,其中,t为当前学习迭代次数;设输出层获胜节点及其周围邻域范围内节点权值的调整量为Δwi_j,则其取值按式(12)计算:
其中,α(t)为学习率,其取值随邻域半径的缩小而逐渐减小,其取值按式(13)所示递减函数进行计算;α(0)为初始学习率,赋值为小于1且大于0的小数;t为当前学习迭代次数,T为算法总的学习迭代次数;
因此,调整后的权值如式(14)所示:
wi_j(t+1)=wi_j(t)+Δwi_j,i∈{1,2,...,n},j∈{1,2,...,m} (14)
其中,wi_j为第t次迭代时的网络连接权值,wi_j(t+1)为第t+1次即下次迭代时的网络连接权值;
⑦判断结束条件是否满足:若t=T,即训练迭代次数达到设定上限值,或误差小于目标误差,或者学习率α(t)小于设定最小学习率αmin时,则训练完成,结束学习迭代;否则,则继续返回到步骤②执行;
4)将训练后SOFM网络输出层权值进行综合计算,调整模糊控制器参数,实现因人而异的轮椅运动速度输出。
说明书
技术领域
一种基于人体坐姿重心(Centre of Gravity,COG)变化进行轮椅的运动方向和速度控制方法,利用自组织特征映射(Self-Orgnization Feature Mapping ,SOFM)神经网络算法自主调整并优化与驾驶操作相关的模糊控制算法参数,完成主动式的学习并区分不同乘用者的驾驶习惯,利用坐姿调整产生的重心变化,实现轮椅的运动控制和驾驶的目的,属于模式识别与智能系统领域。
背景技术
目前,全球60岁以上的老人数量已达6亿以上,社会人口老龄化问题日益突出;同时每年因各种交通事故、自然灾害和种种疾病等原因,还有相当数量的人丧失一种或多种能力(如行走、动手能力等)。其中,肢体残疾尤其是下肢残疾的残障人士占相当大的比例,因此整个社会对于轮椅需求的数量不断增加,功能需求也日趋人性化。
为了给老年人和残障人士提供性能优越的代步工具,并辅助他们完成一些简单的日常活动,从而提高生活自由度、参与更多的社会活动以及参与康复训练和残疾人体育运动等。传统的手动轮椅和普通电动轮椅已经不能满足残疾人日益增长的各种生活和娱乐需求(如参加轮椅网球、轮椅乒乓球运动等),因此许多国家都对电动轮椅进行了深入的开发研究, 其中,多种类型的智能轮椅已经具有了诸如障碍物自主避让,未知环境的导航定位,室内地图创建,爬越楼梯障碍等较为复杂的功能,在一定程度上对提高老年人和残障人士的生活质量起到了积极的推动作用。智能轮椅的输入控制接口形式主要包括以下几种:如手柄(Joystick)输入接口,触摸屏(Touch Screen)输入接口、面部特征(Face Feature)输入接口、语音(Voice)输入接口、视觉(Vision)输入接口、鼠标键盘(Mouse and Keyboard)输入接口以及脑电信号(Electroencephalogram)输入接口等。
上述的各种轮椅操作的人机交互接口(Human-Computer Interface, HCI)在一定程度上限制了残疾人活动自由度,具体不足主要体现在如下几个方面:
(1)手动操作,限制了双手参与其它活动的自由度。如手柄、键盘和鼠标以及触摸屏等人机交互方式等,这类操作方式中需要手参与轮椅控制,因而限制了轮椅乘用者参与需要双手进行的康复训练或体育运动等,给残疾人乘用者带来不便;
(2)输入信号容易受到外界环境因素的干扰,鲁棒性较差。如语音和脑电信号等,由于容易受到外界环境因素的干扰而导致控制效果不理想或失控等。而在嘈杂环境中,语音输入方式几乎无法使用,因此上述几种控制方法几乎无法在实际环境下进行应用。
(3)不具有自主学习驾驶习惯功能,很难或者无法满足不同驾驶习惯用户的需求。各种轮椅的人机交互方式中,轮椅乘用者与设计者之间在操作习惯上存在一定偏差,每位乘用者的操作差异较大,而目前的智能轮椅在交互过程中,不能实现因人而异。由于无法针对不同用户自主学习驾驶习惯,在设计的轮椅产品化过程中会造成因个体差异导致控制参数配置过于繁琐和复杂,给开发者和乘用者都带来很多困难和不便。
发明内容
本发明“基于人体重心变化的自学习轮椅控制方法”主要技术方案内容如下:
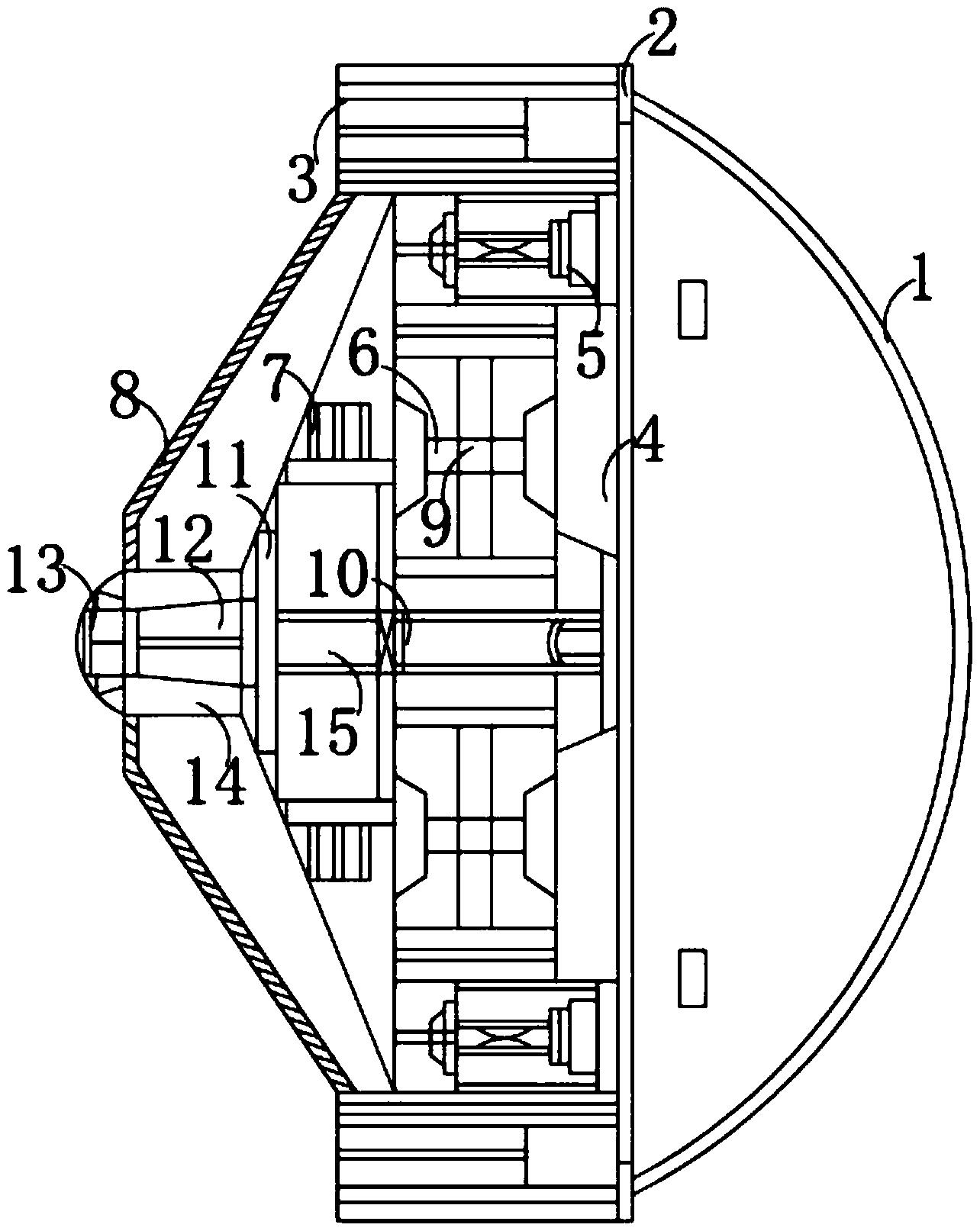
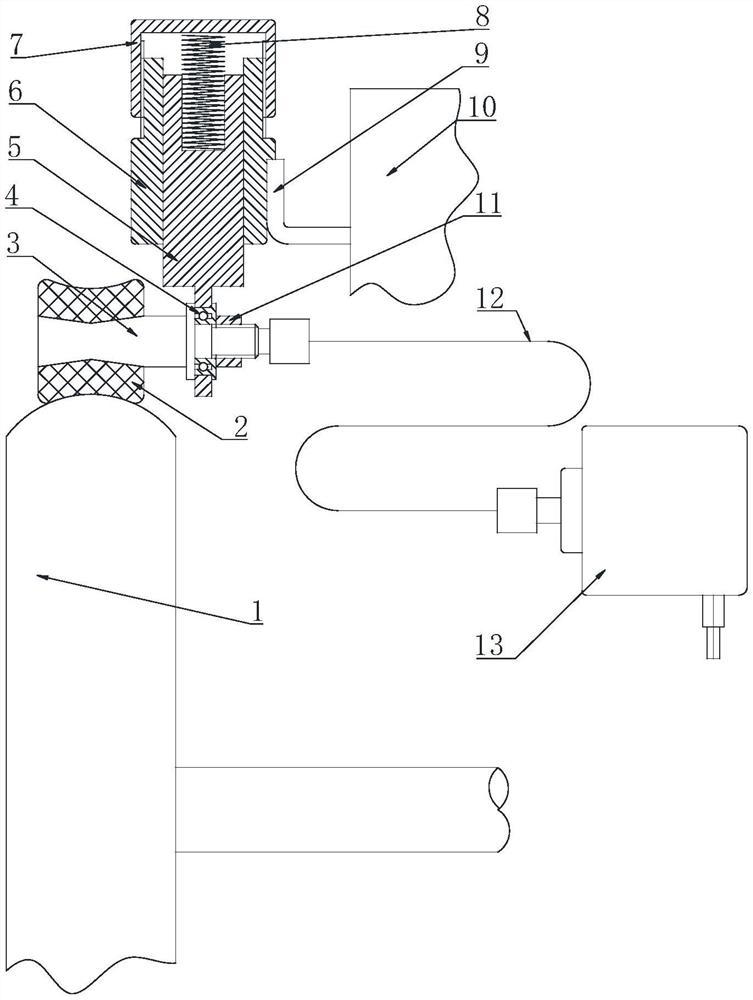
在刚性的轮椅座椅与固定支架之间固定安装A—F六个点式压力传感器,位置以及对应关系如图1所示。利用传感器实时测量六个点所在位置的压力变化,依据各点测量的压力值,计算图1所示座椅二维平面内的人体坐姿重心坐标位置G(x,y)变化,并保存在嵌入式计算机的数据库中;同时,计算机自动计算出重心坐标G(x,y)在二维座椅平面内不同方向的变化速度分量vx和vy以及变化加速度分量ax和ay,并将其作为控制的输入量输入到模糊控制器;模糊控制器对输入量进行归一化和模糊化后,通过自组织特征映射SOFM神经网络算法,完成对乘用者驾驶习惯的自主训练学习,利用学习后的结果实时修改和调整模糊控制器的参数;然后将模糊控制器的输出进行解模糊化,得到轮椅实体中心点在运动平面内期望的运动速度分量Vx和Vy;最后,通过嵌入式计算机(多轴运动控制器)控制直流伺服电机驱动器、直流伺服电机及减速器等执行机构,驱动轮椅轮子各自的运动速度,完成利用人体坐姿重心对轮椅运动方向和速度的控制。
基于人体重心变化的自学习轮椅控制方法,包括以下步骤:
1.在轮椅座椅与架构间安装压力传感器,采集人体坐姿下的受力分布,计算二维重心坐标。
1)安装应变式压力传感器。
人体坐姿二维重心测量和计算的力学模型示意图如图1所示。在座椅与轮椅刚性架构之间对应位置安装A—F六个点式应变型压力传感器(图1中矩形平面部分的A、B、C、D、E、F点所示位置),传感器上下两端分别固定在座椅以及座椅支架部分,测量各点在与座椅平面垂直的法向量方向上(z轴方向)的受力分布。其中FA—FF为座椅在6个传感器测力点测得的z轴方向上所受压力,L(单位:m)和H(单位:m)表示矩形座椅部分的长宽尺寸参数,x,y,z为三维直角坐标系的坐标轴,x轴正方向为轮椅正前方朝向,O为坐标系原点,其中xOy平面为座椅平面,z方向为与该平面垂直的法向量方向。
2)根据建立的人体坐姿二维重心数学模型,计算人体坐姿二维重心坐标位置。
根据图1中A—F各点尺寸及位置参数,得各点在x方向和y方向的坐标如式(1)所示。
其中,xA-xF以及yA-yF为A—F各点的x和y坐标。由力学平衡原理有矩形座椅部分在z轴方向的合力为0,因此可得式(2)。
G=FA+FB+FC+FD+FE+FF (2)
其中,G(单位:N)为轮椅乘坐者坐姿状态自身重力,FA—FF为六个传感器测得的压力,力矩平衡方程如式(3)所示。
其中,∑M(x)与∑M(y)为座椅平面x轴和y轴方向的力矩,因此可得式(4) 如下:
若G(x,y)为人体重心点在二维坐标系xOy下的坐标,x,y为其横、纵坐标值。对于轮椅用户个体而言,其自身重力为常数,因而得重心坐标方程如式(5)所示。
3)设计压力数据采集系统并进行二维重心坐标的计算保存。
嵌入式计算机利用模/数转换器,对多路传感器信号进行实时模数转换,测量得到周期毫秒级的实时压力FA—FF,将测量值代入式(5),完成人体坐姿二维重心坐标的实时计算,并将实时重心数据保存到嵌入式计算机中。
2.设计参数自适应式的模糊控制器,将计算得到的重心信息作为控制器输入量,通过改进的SOFM神经网络算法,根据乘用者的驾驶特点进行自学习,并根据学习结果自动调整控制器相关参数,输出轮椅的实际运动方向和速度。具体步骤如下:
1)利用数据采集实现各点压力实时采集并计算重心坐标后,计算获取的重心点坐标变化的速度和加速度,将两者同时输入二维模糊控制器。
如图2所示。模糊控制器的输入部分为重心坐标变化速度v,以及对时间求一阶导数得到重心坐标变化加速度a。将重心坐标变化速度v分为在座椅平面内x和y方向分量。默认的隶属度函数采用三角形函数,如图3(a)和图3(b)所示,加速度a的x和y方向的隶属度函数如图3(c)和图3(d)所示。
2)利用改进的SOFM学习算法自主调整模糊控制规则,实现模糊自适应控制。
将重心坐标变化参数(速度v和加速度a)输入模糊控制器,模糊控制器的输出为轮椅的实时运动速度Vx和Vy。
本发明中将人体上身坐姿重心变化情况分为9类(即前倾、后倾、左倾、右倾、左前倾、右前倾、左后倾、右后倾和正坐无倾斜等)。由于乘用者体型特点和操控习惯差异造成坐姿偏移以及身体倾斜程度和速度等均有不同,模糊控制规则无法依据不同用户的驾驶习惯进行自主学习,因而引入改进的SOFM神经网络算法,实现对轮椅驾驶的自主学习。依据常规的SOFM算法的基本学习过程,对包括输出层神经元数目、网络初始权值以及网络邻域半径调整规则等进行了算法优化,降低运算复杂度,提高算法在应用中的计算实时性。
①在SOFM神经网络中,若输入层神经元数目为n,输出层神经元数目为m,则层之间的连接共计n×m个连接权值。其中输出层神经元数目m的选取,直接关系到输入层与输出层连接权值的计算复杂度,是影响算法实时性的关键所在,其取值越大,连接权值数量也越多,计算的复杂度越大,所以算法耗时也越长。因此本发明采用优化方法计算求取输出层神经元数目,即取为:m=C+0.7N0+λ。其中,m为欲选取的输出层神经元数目;C为输入样本类别,即期望聚类数目,本实施例期望聚类结果为9类典型上身动作,因此取C=9;N0为选取的输出层初始邻域所包含的神经元节点数目,SOFM算法中,其取值大小与输出层权值匹配的均匀性相关。例如,当样本输入分布差异较大时,可能会使输出层个别神经元映射后获得匹配过多,而另外一些神经元则几乎没有匹配机会,最终导致聚类的错误或精度下降;本实施例中由于输出层拓扑结构为矩形网络,且邻域半径通常选取为中心对称区域(如图5中方形区域所示)即依据输出层的初始邻域范围为3×3的激励区域,因此选取N0=9与C相同;且由于m为输出层神经元数目,需按照 “整数行数×整数列数”的输出层数目进行取值,因此将λ设为初始修正取整参数,本实施例中取λ=0.7,即m=9+0.7×9+0.7=16=4×4,即输出层为“4行×4列” 分布的二维神经元阵列。
若输出层神经元二维阵列数目发生变化,即聚类的类别变多或变少,则上述输出层神经元节点数目的计算方法仍然适用。例如,某矩形拓扑输出层网络,若输入样本的类别数为C=23,而选取输出层初始邻域范围N0=5×5=25的区域,神经元数目m选取时,取λ=1.5,有m=23+0.7×25+1.5=42=6×7,即可选取输出层为“6行×7列”的阵列分布结构,即合计为42个输出层神经元节点。
②训练学习过程中,初始权值的选取与迭代收敛次数相关,关系到运算的速度,且在影响实时性的同时,也影响最终的聚类精度,因此对于初始权值的选取,本发明中按如下方法进行了优化。
若一个SOFM网络的输入层节点数为n,输出层节点数为m。其第l个输入样本向量即重心坐标向量为{Gl1,Gl2,…,Gli,…,Gln}。输入样本向量类分别记为:{c1, c 2, …, cp, …, cr},其中r为每组输入样本向量中所包含的预期聚类数量最大值,即本发明实施例中重心坐标向量为{Gl1,Gl2},样本最多聚类数为9类,其中c1— c9对应的9类典型动作,故取r=9。针对具体的聚类情况,r亦可取其他值。若设r个聚类动作中任意一个聚类为cp(如重心左倾类),则第p个聚类中对应的重心坐标数目为k个,在这k个坐标值中,对于输入层的n个节点中的第i个节点而言,若该类别在此节点上的分量坐标为Cp_i_G,则有:
其中k为第p个聚类中的样本个数,i为输入层节点序号,q为[1,k]之间自然数序列。则SOFM网络初始连接权值wi_j可按如式(8)确定。Gi_q表示重心坐标的x坐标和y坐标值;
wi_j=Cp_i_G+ε,其中i∈{1,2,...n} (8)
其中,j为输出层节点序号,j∈{1,2,…,m}。m为输出层节点数目,ε为均衡参数,取ε∈[-1,1],作用对初始连接权值进行只保留到小数点后一位的取整操作。
例如,在本实施例中,人体坐姿的前倾、后倾、左倾、右倾、左前倾、右前倾、左后倾、右后倾和正坐无倾斜,其各自对应的聚类类别为c1— c9,如左倾对应聚类为c3,即p=3;输入重心坐标样本向量维数n=2,即输入层节点数目n=2,输入向量为135个二维坐标样本,即样本数s=135。若第l个重心坐标样本向量记作{Gl1,Gl2},即重心样本在平面坐标系下包含的座椅平面坐标系下的x坐标和y坐标分量。若左倾聚类的样本数目总数为5个,即k=5,其重心坐标分别为(-0.91,0.06)、(-0.92,0.02)、(-0.93,0.03)、(-0.94,0.04)、(-0.95,0.05),且坐标对应的样本序号分别为1,3,5,7,9,则对于此类别c3而言,其在输入层第1个节点上分量(即重心坐标的x方向上)可记作:
即:
对于此类别c3而言,其在输入层第2个节点上分量(即重心坐标的y方向上)可记作:
即:
C3_G=(-0.93,0.04)
因此输出层c3类所在的节点j与输入层节点1和节点2之间的初始连接权值均取为:
w1_j=w2_j=-(0.93+ε1,0.04+ε2),取ε1=0.03,ε2=-0.04,即w1_j=w2_j=(-0.9,0);w1_j与w2_j亦可依据聚类数据源情况取不同值,如取w1_j=(-0.9,0)而w2_j=(-0.9,0.1)亦可,因为初始连接权值差异不大时,在较少次数的迭代计算后,经收敛过程调整权之后,对最终聚类结果影响可忽略。
按上述方法进行计算,可分别得到
按上述方法进行计算,可分别得到w1_1至w2_m,即输入层n个节点与输出层m个节点之间各神经元节点间的全部连接权值初始值wi_j。此方法确定的初始连接权值,本质上相当于近似得到常规SOFM算法训练迭代一定次数后,已经逐渐收敛到一定程度后的结果,因而在后续权值的计算中节省了迭代计算开销,减少了算法最终收敛所需的计算时间,提高了运行的实时性。
③邻域调整优化方法。
在本发明中采用邻域优化算法,从而降低邻域调整算法的复杂度,提高实时性。若输出层m个网络节点中的第j节点竞争获胜,则以j为聚类中心,依据误差确定某时刻的权值调整域Nj(E)。初始邻域Nj(E0)通常选取较大(约为总节点的50%~80%),而在训练过程中Nj(E)随着训练时间逐渐收缩。邻域范围调整按简化的五段分段函数计算,从而降低了计算复杂度,如式(9)所示。
其中,Nj(E)表示获胜神经元j的邻域,Nj(E0)为初始邻域,本发明实施例中取为重心坐标样本数的类别数C,即Nj(E0)=9。E为当每组输入样本通过网络后,赢得此样本的输出层神经元权值与该组输入样本的绝对值距离之和。E0为初始误差,EG为目标误差。
3)改进后的SOFM算法计算流程。
①初始化各连接权值,按照式(8)方式进行初始连接权值确定。
②将输入样本向量输入到网络的输入层中。
③按式(10)计算输入第l组向量 与输出层m个节点间的距离dj:
其中 在本实施例中为人体重心的二维坐标数据样本。
④计算满足最小距离的输出层神经元c与样本间距离,使其对于任意的输出层神经元节点j,有:
⑤按照式(9)确定类别c对应的邻域Nj(E)范围。
⑥按式(12) 分别计算调整输出层获胜神经元c及其邻域Nj(E)内的节点所连接的权值,其中,t为当前学习迭代次数。设输出层获胜节点及其周围邻域范围内节点权值的调整量为Δwi_j,则其取值按式(12)计算:
其中,α(t)为学习率,其取值随邻域半径的缩小而逐渐减小,保证算法最终实现权值收敛。其取值按式(13)所示递减函数进行计算。α(0)为初始学习率,通常赋值为小于1且大于0的小数;t为当前学习迭代次数,T为算法总的学习迭代次数。
因此,调整后的权值如式(14)所示:
wi_j(t+1)=wi_j(t)+Δwi_j,i∈{1,2,...,n},j∈{1,2,...,m} (14)
其中,wi_j(t)为第t次迭代时的网络连接权值,wi_j(t+1)为第t+1次即下次迭代时的网络连接权值。
⑦判断结束条件是否满足。若t=T,即训练迭代次数达到设定上限值,或误差小于目标误差,或者学习率α(t)小于设定最小学习率αmin时(本实施例中选取αmin=0.005),则训练完成,结束学习迭代。否则,则继续返回到步骤②执行;
4)将训练后SOFM网络输出层权值进行综合计算,调整模糊控制器参数,实现因人而异的轮椅运动速度输出。
利用上述优化改进后的SOFM算法,在轮椅学习模式下,通过对压力传感器实时计算得到的重心坐标位置样本进行聚类,将人体上身坐姿的倾斜情况分为9类(即前倾、后倾、左倾、右倾、左前倾、右前倾、左后倾、右后倾和正坐无倾斜等)。如本实施例中某用户的左右倾斜程度相对较大,则根据SOFM算法学习聚类的结果,对模糊控制过程中的三角形隶属度函数斜率以及三角形顶点位置等参数进行相应的调整,如图3(e)和图3 (f)所示,网络输出层聚类各节点与标准节点间的平均距离增大,则沿横向线性拉伸模糊控制器隶属度函数;若用户操作轮椅时倾斜程度较小,则适当压缩模糊控制器隶属度函数;若重心坐标偏移,则平移隶属度函数。因此实现依据SOFM算法学习结果自主调整模糊控制器参数,完成轮椅对乘用者驾驶习惯的学习,达到控制算法因人而异的目的。
利用改进后的SOFM算法,在驾驶习惯学习过程中,SOFM聚类算法收敛速度和学习效率得到大幅度提高,提升了算法的实时性和聚类正确率(如图9所示),满足轮椅实时学习控制的要求,消除了因用户驾驶习惯不同带来的手动调整参数过于繁琐的问题。
附图说明
图1 人体二维重心计算模型图
其中,A—F为六个压力传感器位置;
FA—FF为六个压力传感器对座椅的支撑力(单位:N);
L,H分别为矩形座椅的长宽尺寸参数(单位:m);
G(x,y)为人体重心点,(x,y)为重心在座椅平面内的二维坐标值。
图2 模糊控制器结构组成
输入v为重心变化速度,输出u为轮椅中心的运动x方向和y方向速度Vx,Vy。
图3 重心变化隶属度函数曲线
(a)重心变化速度x方向初始隶属度函数曲线
(b)重心变化速度y方向初始隶属度函数曲线
(c)重心变化加速度x方向初始隶属度函数曲线
(d)重心变化加速度y方向初始隶属度函数曲线
(e)重心变化速度x方向学习后隶属度函数曲线
(f)重心变化速度y方向学习后隶属度函数曲线
图4 二维SOFM平面阵列
图5 邻域Nj(E)的收缩示意图
图6 自组织特征映射SOFM算法权值调整函数
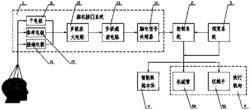
图7 人体坐姿重心控制的自学习轮椅原理示意图
其中:
M1—M4为四个24V直流伺服电机;
DIR1—DIR4为四轮的运动方向,轮椅向前运动时电机为正转,向后运动时电机为反转;
PWM1—PWM4为四个电机的PWM(Pulse Width Modulation)脉宽调制通道控制信号;
A/D为与运动控制器相连的模/数转换器;
图8 轮椅控制实施例沿直线运动控制仿真
(a) 运动轨迹仿真曲线
(b) 运动参数仿真曲线,其中xe,ye为轮椅在地面平面直角坐标系下的x方向,y方向位置误差曲线,θe为轮椅朝向与设定直线前进方向之间的夹角误差曲线。
图9 Matlab权值调整仿真结果
其中,(a) 常规算法迭代200次权值
(b) 改进算法迭代200次权值
(c) 常规SOFM算法聚类结果
(d) 改进后算法聚类结果
具体实施方式
基于人体重心变化的自学习轮椅控制方法,发明人设计了一种具有依据重心变化规律控制的智能轮椅系统(如图7所示),其中:
M1-M4为+24V供电的四个直流伺服电机;
DIR1-DIR4为四轮的运动方向,轮椅向前运动时电机为正转,向后运动时电机为反转;
PWM1-PWM4为四个电机的PWM(Pulse Width Modulation)脉宽调制通道控制信号;
A/D为与运动控制器相连的模数转换器;
基本工作原理如下:
轮椅座椅部分通过6个压力传感器采集用户坐姿下的各点受力值,将压力值对应的电压信号经过A/D转换器送入嵌入式计算机进行保存。嵌入式计算机根据采集的压力计算出实时的重心位置坐标,将一段时间内的用户重心坐标采样数据保存到内存中,并作为SOFM神经网络的输入,依据优化的SOFM算法计算得到神经网络输出层聚类结果。模糊控制器依据聚类结果调整模糊控制器参数,实时输出轮椅的期望运动速度和方向,并将其以各轮电机的实时转速和转向的形式,利用四路PWM通过直流伺服电机驱动器,输出控制四路电机。各电机配有转速编码器,将转速经过编码器反馈给嵌入式计算机,形成转速闭环控制系统,实现对轮椅的最终控制。电源部分采用直流24V蓄电池供电,充满电后可连续驱动轮椅达3-4小时。
以下根据人体重心变化的自学习轮椅方法,从硬件系统结构组成、人体二维重心计算、以及轮椅模糊控制算法等以下3个方面阐述实施例。
1.设计系统硬件结构
系统的硬件架构示意图如图7所示,构成具有嵌入式计算机控制的智能轮椅系统。
1)控制核心采用嵌入式具有PWM多路输出的控制器,并具有可扩展的端口,如RS-232以及USB2.0等,可方便的直接输出多路PWM控制信号实现对直流伺服电机的控制。
2)A/D转换模块。将多路压力传感器(座椅部分6路,安装位置如图1所示)测得的多路压力模拟电压量分别送入对应的A/D转换模块,并将其输出与嵌入式计算机的数字量输入相连。
3)电机驱动模块。将嵌入式控制器的PWM控制信号输入到驱动模块,经过电压放大,利用PWM波调压实现对四个直流伺服电机的驱动。
4)直流伺服电机。直流伺服电机通过控制转速的方向和大小,并通过相应的减速装置(减速器)实现驱动四轮的速度和方向,改变轮椅运动方向和速度。
5)编码器。利用编码器分别对直流伺服电机进行速度检测,将测量得到的结果送入运动控制器,形成转速闭环反馈。
2. 采集压力数据以及计算人体二维重心G(x,y)坐标
1)传感器的安装位置如图1中A—F所示,其中选取L=H=0.2m。
2)设人体重力为G,则其重心坐标为G(x,y),由式(5)可得:
x=(FA+FB-FC-FD)×0.2/G
y=(FD+FB+FF-FA-FC-FE)×0.2/G
其中0.2/G对于某一乘用者而言为常数,令常数C=0.2/G,因而人体坐姿重心G(x,y)只与六个压力传感器测得的压力值FA—FF相关,并在计算机中根据测得六个传感器压力值,计算出人体坐姿重心在如图1所示的二维平面内的坐标G(x,y)值。
3. 轮椅的方向和速度控制自适应参数整定模糊控制器设计
由重心测量过程得到实时人体重心当前坐标G(x,y)后,本发明实施例中A/D转换器的采样周期为Ts=20ms。
1)计算模糊控制器的输入量和输出量
依据采集的重心坐标,计算重心轮椅座椅平面坐标系内x、y轴的速度分量vx、vy以及加速度分量ax和ay,将其模糊化后作为模糊控制器的输入量。即重心变化速度向量v=(vx,vy),以及加速度向量a=(ax,ay)。
输出部分为轮椅的运行速度矢量V=(Vx,Vy),其中包含座椅平面坐标系内x和y方向的运动速度分量Vx,Vy。模糊控制器的隶属度函数初始化状态如图3所示。
3)设计输入和输出之间的模糊规则,并利用SOFM算法自主学习调整控制器参数
根据重心变化与轮椅运动趋势之间存在的关系,设计模糊控制规则表,如表1所示。同时,在轮椅学习状态模式下,使用改进的SOFM算法对隶属度函数进行适当调整,适应乘用者习惯。
按照前述学习算法的学习过程,在本实施例中对采集的数据样本进行分类学习训练。并将改进算法用于自适应调整模糊控制隶属度函数参数,SOFM改进算法运行过程如下:
①初始化各连接权值,按照式(7)和(8)方式进行初始连接权值确定。
首先,本发明实施例中,采用优化方法计算求取输出层神经元数目,即取:m=C+0.7N0+λ。其中,m为欲选取的输出层神经元数目;C为输入样本类别,即期望聚类数目,本实施例期望聚类结果为9类典型上身动作,因此取C=9;N0为选取的输出层初始邻域所包含的神经元节点数目。本实施例中由于输出层拓扑结构为矩形网络,且邻域半径通常选取为中心对称区域(如图5中方形区域所示)即依据输出层的初始邻域范围为3×3的激励区域,因此选取N0=9与C相同;且由于m为输出层神经元数目,需按照 “整数行数×整数列数” 的输出层数目进行取值,因此将λ设为初始修正取整参数,本实施例中取λ=0.7,即m=9+0.7×9+0.7=16=4×4,即输出层为“4行×4列”分布的二维神经元阵列。
其次,在本实施例中,人体坐姿的前倾、后倾、左倾、右倾、左前倾、右前倾、左后倾、右后倾和正坐无倾斜各自对应的聚类类别为c1— c9,如左倾对应聚类为c3,即p=3;输入重心坐标样本向量维数n=2,即输入层节点数目n=2,输入向量为135个二维坐标样本,即样本数s=135。若第l个重心坐标样本向量记作{Gl1,Gl2},即重心样本在平面坐标系下包含的座椅平面坐标系下的x坐标和y坐标分量。例如:c3(左倾)的样本数目总数为5个,即k=5,其重心坐标分别为(-0.91,0.06)、(-0.92,0.02)、(-0.93,0.03)、(-0.94,0.04)、(-0.95,0.05),若l对应的样本序号若为1,3,5,7,9,则对于此类别c3而言,其在输入层第1个节点上分量(即重心坐标的x方向上)可记作:
即:
对于此类别c3而言,其在输入层第2个节点上分量(即重心坐标的y方向上)可记作:
即:
C3_G=(-0.93,0.04)
因此输出层c3类所在的节点j与输入层节点1和节点2之间的初始连接权值均取为:
w1_j=w2_j=-(0.93+ε1,0.04+ε2),取ε1=0.03,ε2=-0.04,即w1_j=w2_j=(-0.9,0);
按上述方法进行计算,分别得到w1_1至w2_16,即输入层2个节点与输出层16个节点之间各神经元节点间的全部连接权值初始值wi_j。
②将样本向量输入到神经网络的输入层节点。输入样本向量即重心坐标 到输入层节点。
③按式(10)计算计算输入第l组向量 与输出层第i个节点之间距离dj:
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0