









专利摘要
本发明的目的在于提供海洋平台撤离系统锁紧释放机构,包括撤离箱、撤离轨道、海洋平台甲板、托架,撤离箱固定在海洋平台甲板上,撤离箱里设置锁紧释放装置,锁紧释放装置与托架相配合,撤离轨道安装在托架上;锁紧释放装置包括连杆机构、锁紧释放机构,连杆机构包括第一手柄驱动单元、第二手柄驱动单元、中间连杆,第二手柄驱动单元相对于第一手柄驱动单元颠倒布置,锁紧释放机构包括四个,其中两个锁紧释放机构与第一手柄驱动单元相配合,其余两个锁紧释放机构与第二手柄驱动单元相配合。本发明锁紧释放机构能牢固地将托架固定在撤离箱底部,可以通过简单省力的操作将托架快速释放,为逃生人员争取宝贵的逃生时间。
权利要求
1.海洋平台撤离系统锁紧释放机构,其特征是:包括撤离箱、撤离轨道、海洋平台甲板、托架,撤离箱固定在海洋平台甲板上,撤离箱里设置锁紧释放装置,锁紧释放装置与托架相配合,撤离轨道安装在托架上;所述锁紧释放装置包括连杆机构、锁紧释放机构,所述连杆机构包括第一手柄驱动单元、第二手柄驱动单元、中间连杆,第一手柄驱动单元包括第一手柄、第一-第六连杆,第一连杆、第二连杆、第三连杆、第四连杆依次相连构成平行四边形,第三连杆、第四连杆、第六连杆、第五连杆依次相连构成平行四边形,第二连杆与第五连杆在一条直线上,第一手柄与第一连杆相固定,第四连杆的端部连接中间连杆的第一端,第二手柄驱动单元与第一手柄驱动单元结构相同并采用同样形式与中间连杆的第二端相连,第二手柄驱动单元相对于第一手柄驱动单元颠倒布置,所述锁紧释放机构包括第七-第十三连杆,第七连杆通过转动副与第八连杆相连,第九连杆的两端分别通过转动副与第十连杆以及第八连杆的中部相连,第八连杆与第十一连杆的中部通过转动副相连,第十一连杆的两端分别通过转动副与第十连杆的中部以及第十二连杆的端部相连,第十三连杆为L型结构,第十三连杆的拐角与第十连杆的端部通过转动副相连,第十三连杆的第一端部与第十二连杆的端部通过转动副相连,第十三连杆的第二端部卡在托架的下方,并随第七连杆的转动释放托架,所述的锁紧释放机构包括四个,通过其第七连杆连接第五连杆,其中两个锁紧释放机构与第一手柄驱动单元相配合,其余两个锁紧释放机构与第二手柄驱动单元相配合。
说明书
技术领域
本发明涉及的是一种救生装置,具体地说是海上救生装置。
背景技术
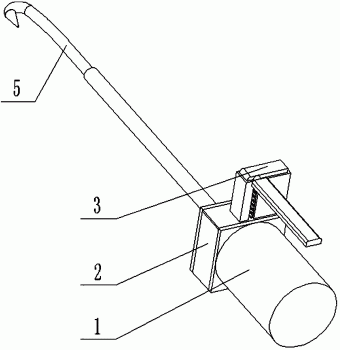
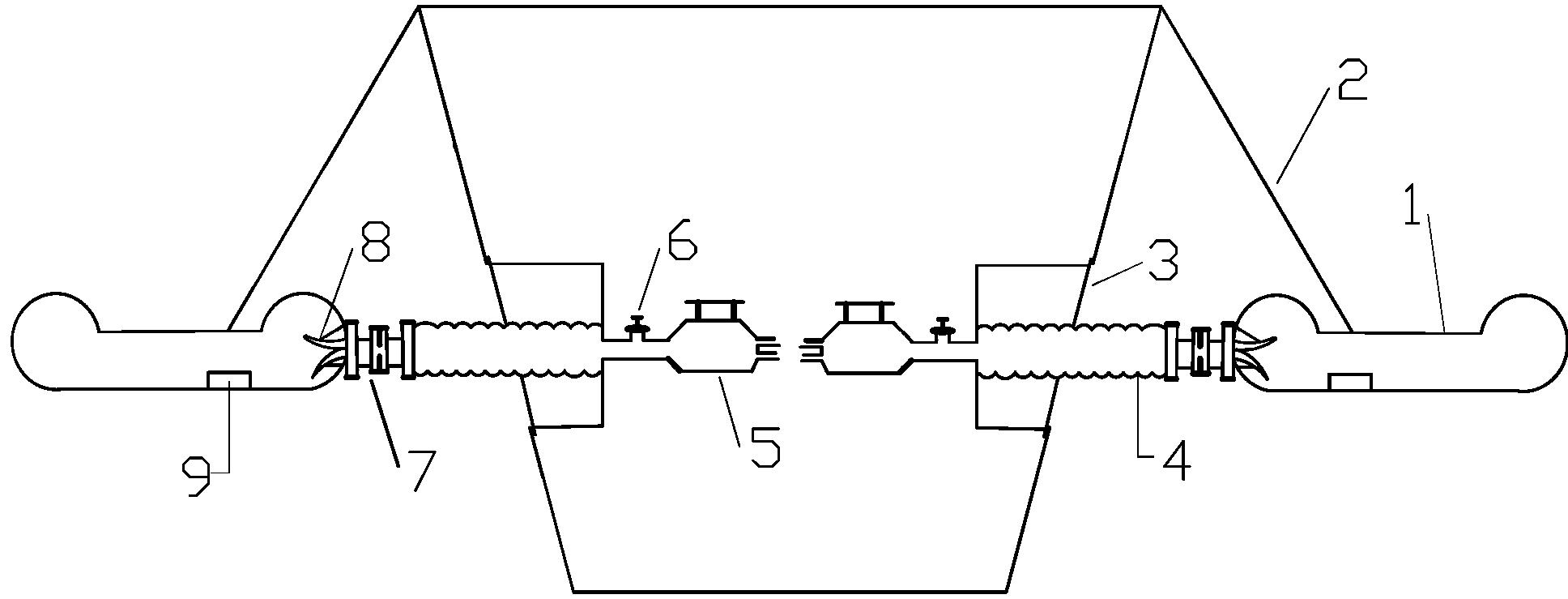
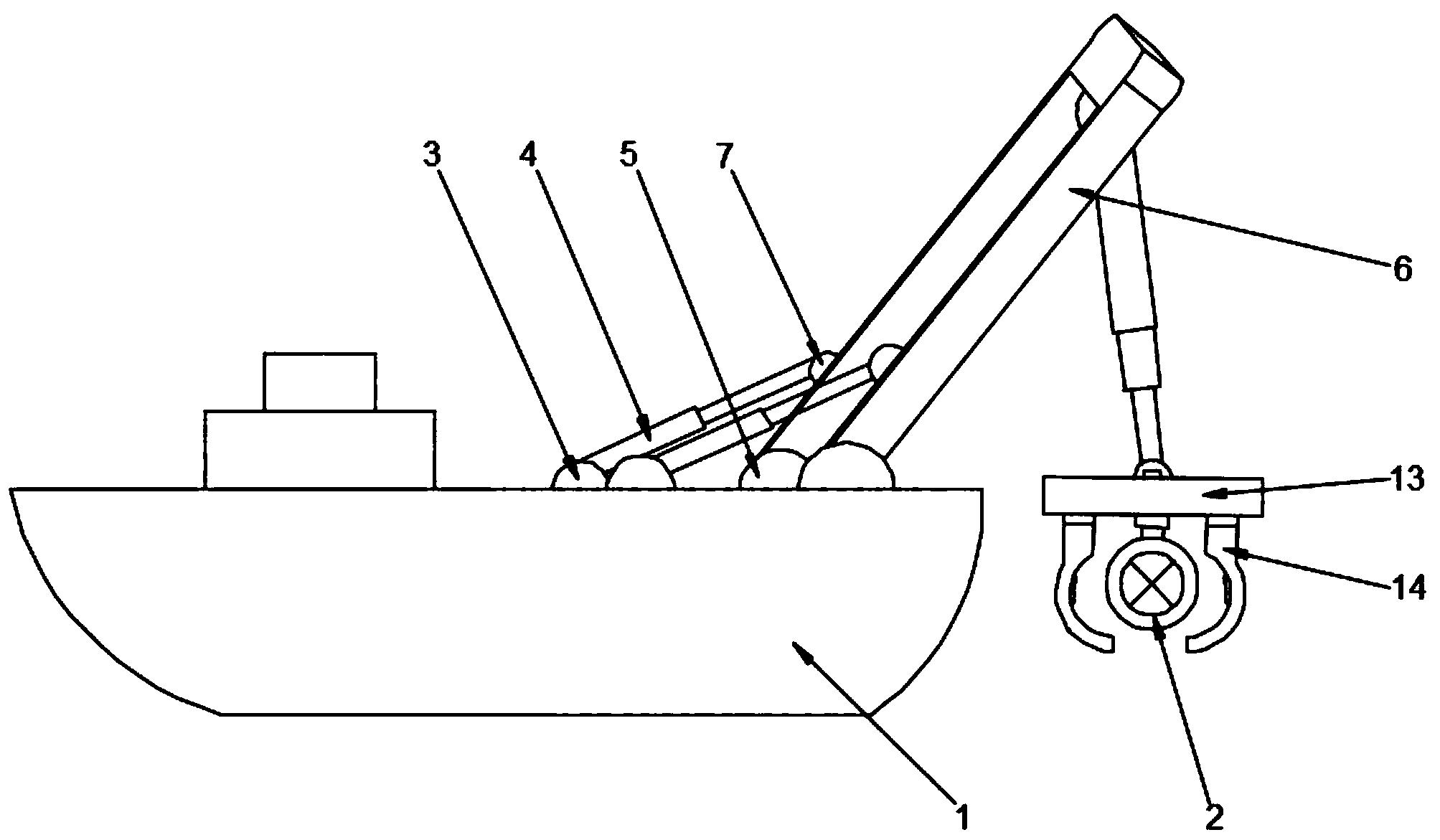
目前,全球范围内的能源紧缺使得海洋石油开发活动不断加强,对各类海洋钻采平台的需求大幅上升。随着海上作业的广泛进行,更加突出了保障工作人员生命安全的重要性。海洋平台撤离系统是一种依照强制性规范配备的海上救生设备,如图1所示,泛指一类由撤离箱1、释放装置3、撤离轨道4和救生筏构成的综合性海上救生设备,用于人员紧急情况下逃生。其中救生筏置于托架5上,托架被锁紧释放装置牢固地锁紧在箱体底部,当发生紧急情况时,托架被释放至海面,如图1b所示,救生筏在海面自动展开,撤离轨道上端与撤离箱底部连接,下端与展开的救生筏连接,进而给工作人员提供逃生途径。
锁紧释放装置的主要作用:①非紧急情况下牢固地锁紧救生筏托架②发生紧急情况时能够在最短时间内将撤离轨道与救生筏释放到海中。
国际专利公开号WO 2014/100006(A1),公开日2014年6月26日,发明创造的名称为“CONDUITS AND METHODS FOR MARINE EVACUATION SYSTEM”,该申请案公开了一种海上撤离系统撤离轨道及救生筏的锁紧释放方式,采用活动门式锁紧释放装置,其不足之处在于:①撤离轨道及救生筏重达数吨,其装置锁紧后活动门门与撤离箱箱体间存在较大摩擦,紧急情况下不易快速打开;②活板门向下打开后会悬在箱体底部,回收作业时再锁紧过程繁琐。
发明内容
本发明的目的在于提供应用于附带有救生筏的托架的可靠固定与快速释放的海洋平台撤离系统锁紧释放机构。
本发明的目的是这样实现的:
本发明海洋平台撤离系统锁紧释放机构,其特征是:包括撤离箱、撤离轨道、海洋平台甲板、托架,撤离箱固定在海洋平台甲板上,撤离箱里设置锁紧释放装置,锁紧释放装置与托架相配合,撤离轨道安装在托架上;所述锁紧释放装置包括连杆机构、锁紧释放机构,所述连杆机构包括第一手柄驱动单元、第二手柄驱动单元、中间连杆,第一手柄驱动单元包括第一手柄、第一-第六连杆,第一连杆、第二连杆、第三连杆、第四连杆依次相连构成平行四边形,第三连杆、第四连杆、第六连杆、第五连杆依次相连构成平行四边形,第二连杆与第五连杆在一条直线上,第一手柄与第一连杆相固定,第四连杆的端部连接中间连杆的第一端,第二手柄驱动单元与第一手柄驱动单元结构相同并采用同样形式与中间连杆的第二端相连,第二手柄驱动单元相对于第一手柄驱动单元颠倒布置,所述锁紧释放机构包括第七-第十三连杆,第七连杆通过转动副与第八连杆相连,第九连杆的两端分别通过转动副与第十连杆以及第八连杆的中部相连,第八连杆与第十一连杆的中部通过转动副相连,第十一连杆的两端分别通过转动副与第十连杆的中部以及第十二连杆的端部相连,第十三连杆为L型结构,第十三连杆的拐角与第十连杆的端部通过转动副相连,第十三连杆的第一端部与第十二连杆的端部通过转动副相连,第十三连杆的第二端部卡在托架的下方,并随第七连杆的转动释放托架,所述的锁紧释放机构包括四个,通过其第七连杆连接第五连杆,其中两个锁紧释放机构与第一手柄驱动单元相配合,其余两个锁紧释放机构与第二手柄驱动单元相配合。
本发明的优势在于:锁紧释放机构能牢固地将托架固定在撤离箱底部,待发生紧急情况时,可以通过简单省力的操作将托架快速释放,为逃生人员争取宝贵的逃生时间;撤离系统进行回收作业时,托架再锁紧操作简单。
附图说明
图1a为海洋平台撤离系统整体布置图(收起状态),图1b海洋平台撤离系统整体布置图(释放状态);
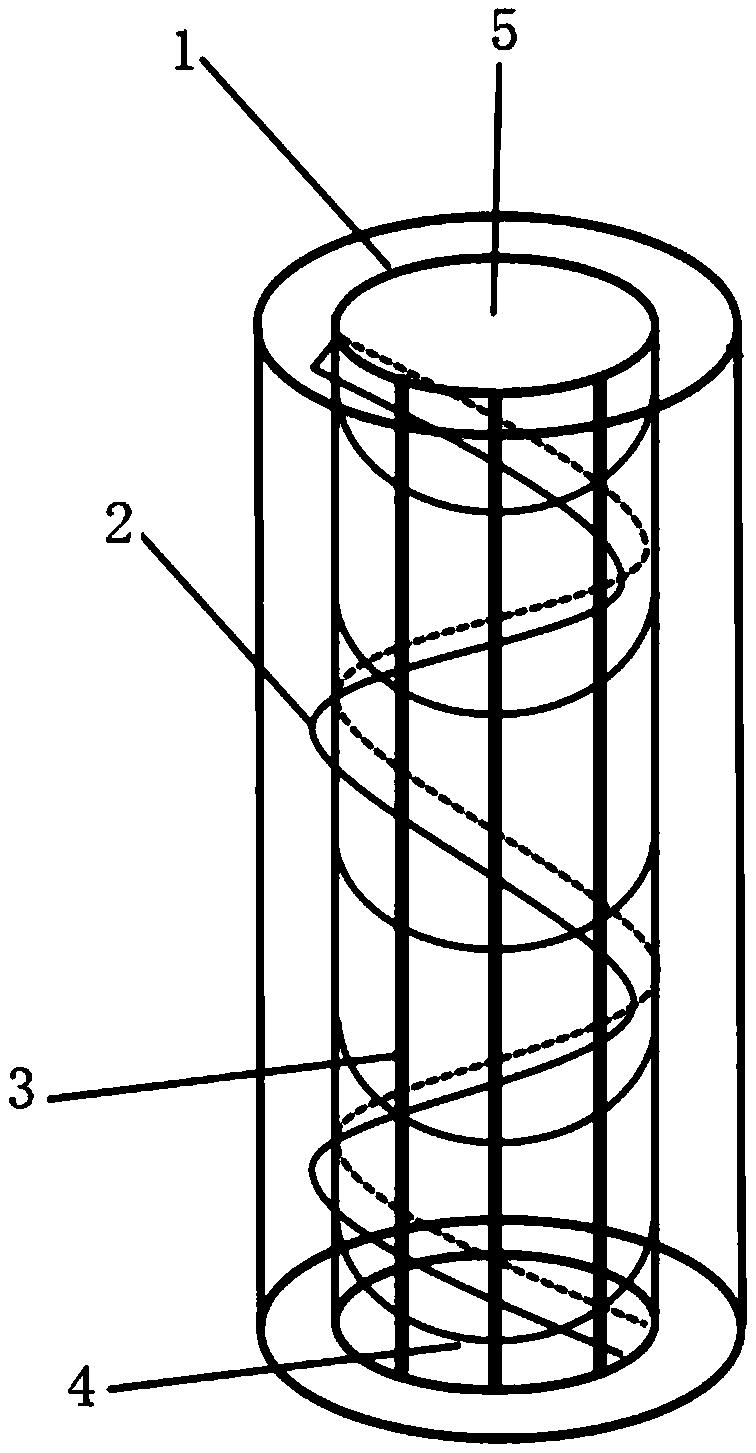
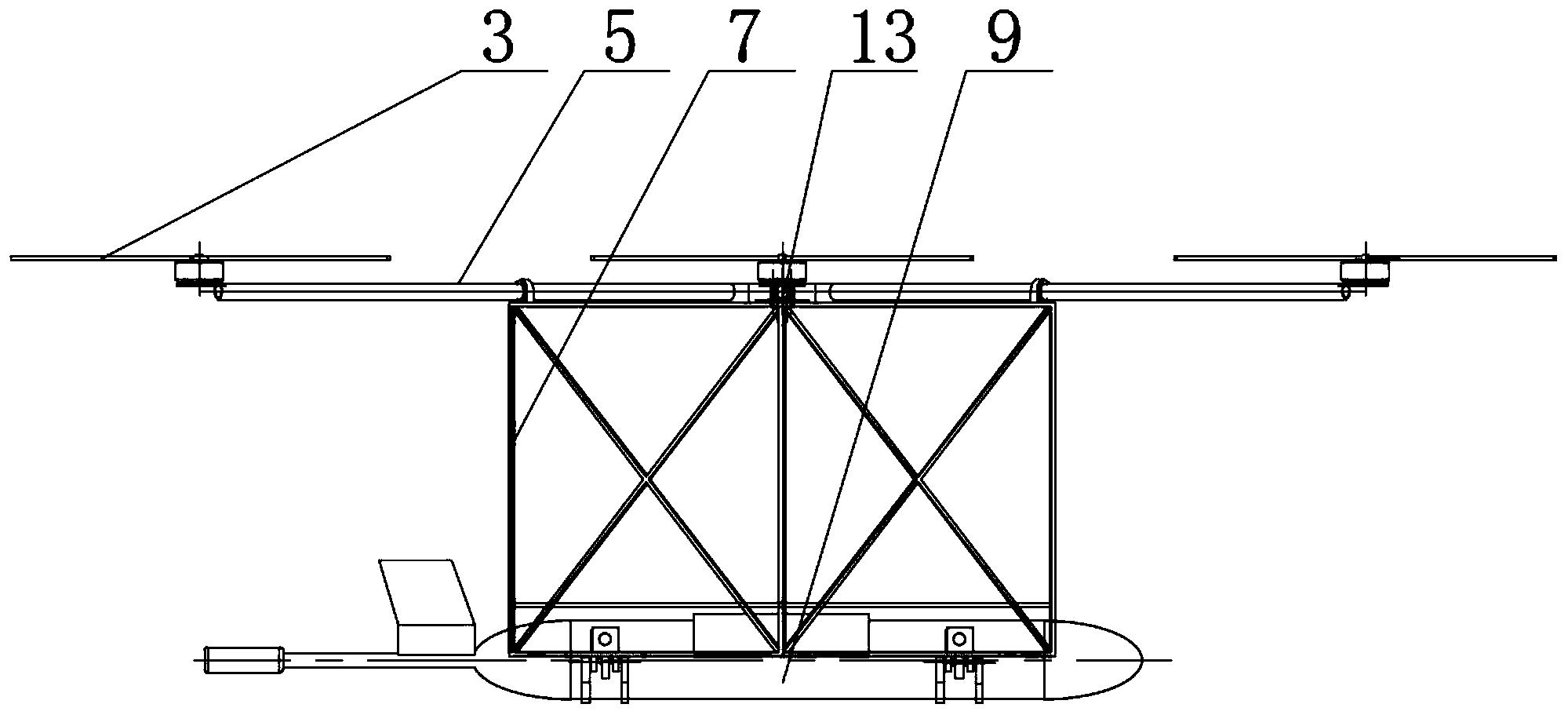
图2为海洋平台撤离系统锁紧释放机构(锁紧状态下)与箱体位置关系示意图;
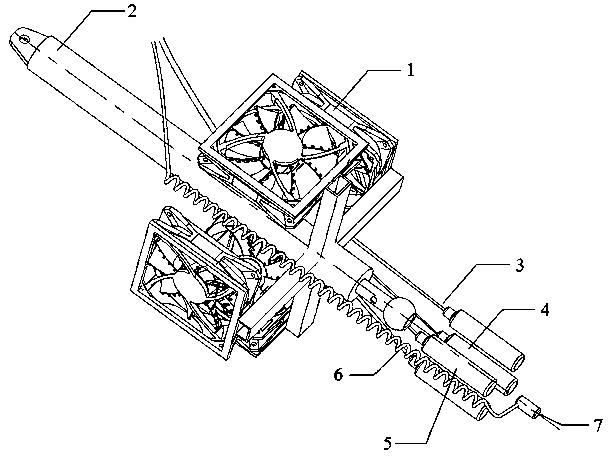
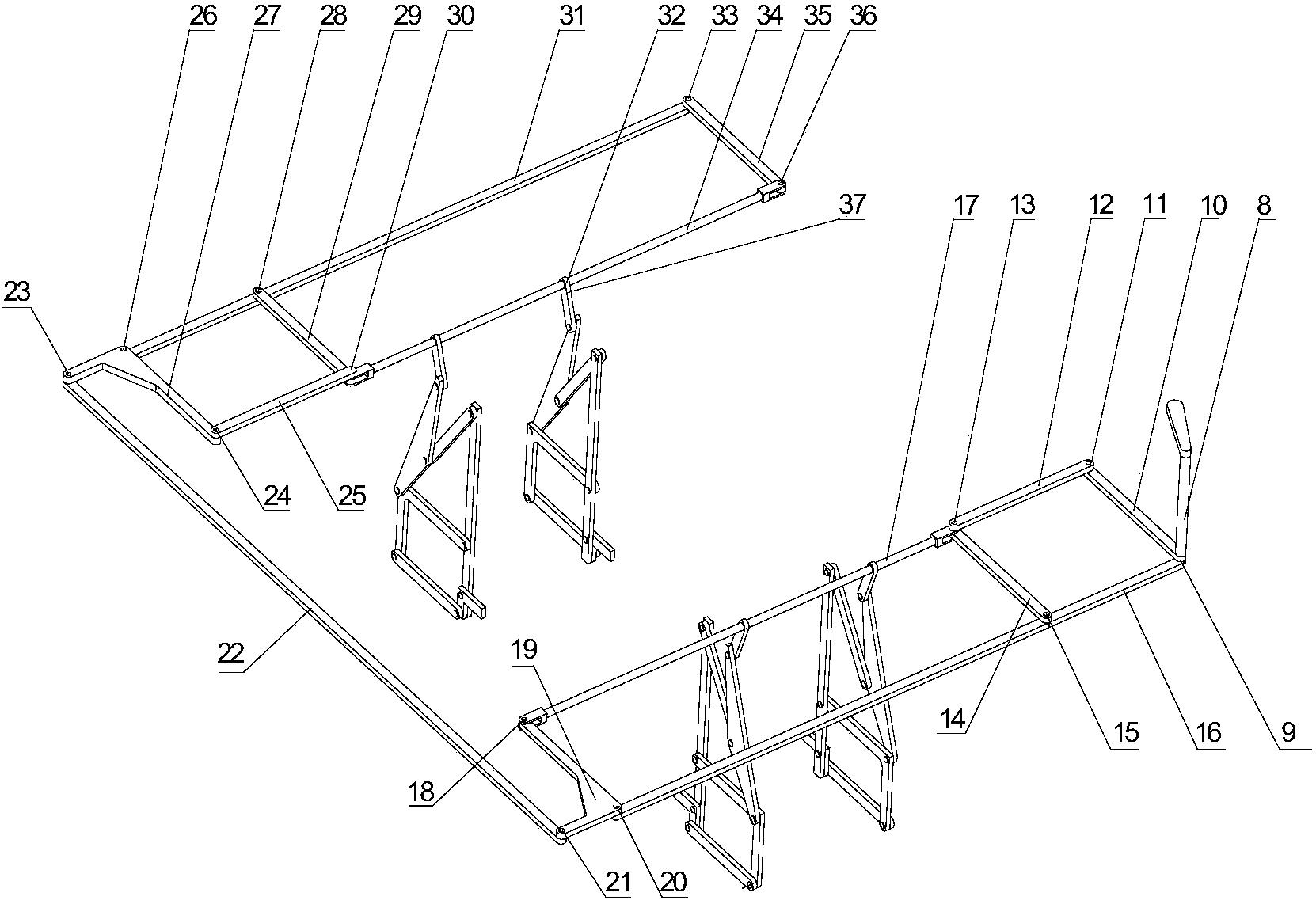
图3为锁紧释放装置结构图;
图4a为锁紧释放机构结构示意图,图4b为锁紧释放机构释放状态示意图;
图5a为手柄驱动单元示意图,图5b为手柄驱动单元释放状态示意图。
具体实施方式
下面结合附图举例对本发明做更详细地描述:
结合图1-5,该机构包括联动部分、锁紧释放部分以及连接部件。
对照图3,所述联动部分由手柄8、连杆10、连杆12、连杆14、连杆16、连杆17、连杆19、连杆22、连杆25、连杆27、、连杆29、连杆31、连杆34、连杆35、连杆37组成,所述连杆16、连杆31与箱体固连,手柄8与连杆11固定连接,手柄8、连杆10通过转动副9与连杆16连接,连杆10通过转动副11与连杆12连接,连杆12、连杆17通过转动副13与连杆14连接,连杆14通过转动副15与连杆16连接,连杆17通过转动副18与连杆19连接,连杆19通过转动副20与连杆16连接,连杆19通过转动副21与连杆22连接,连杆22通过转动副23与连杆27连接,连杆27通过转动副26与连杆31连接,连杆27通过转动副24与连杆25连接,连杆25、连杆29通过转动副30与连杆34连接,连杆29通过转动副28与连杆31连接,连杆34通过转动副36与连杆35连接,连杆35通过转动副33与连杆31连接。
对照图4a所述锁紧释放机构由连杆39、连杆41、连杆43、连杆45、连杆48、连杆50组成,所述连杆43与箱体固定连接,连杆39通过转动副40与连杆41连接,连杆41通过转动副42与连杆43连接,连杆43通过转动副44与连杆50连接,连杆43通过转动副46与连杆45连接,连杆45通过转动副47与连杆48连接,连杆48通过转动副49与连杆50连接,连杆50通过转动副51与连杆39连接。
图1所示为撤离系统整体结构示意图,撤离箱1安装在海洋平台甲板2上,稳定托架可经由箱体伸出甲板的部分垂降至海面6,图1a为系统存放状态的示意图,图1b为装置释放后的示意图。本发明所述机构位于锁紧释放装置3处。
图2中,释放装置中的本发明所述机构处于锁紧状态。非紧急情况下该机构将托架5牢固地锁紧在撤离箱箱体下部。发生紧急情况时,仅需操作人员旋转手柄8即可使机构立即解锁,托架随即释放。
如图3所示,该机构为空间连杆机构,可分为两个主要部分:在竖直平面内运动的锁紧释放部分(结构如图4所示),以及在水平面内运动的联动部分(结构如图5所示)。
如图2、3所示,作为联动部分,手柄8与联动部分连杆10固连,作用于手柄8上的扭矩通过连杆10传递到联动部分,联动部分连杆17与连杆34产生的水平运动通过连接部件37带动锁紧释放部分的运动,进而控制锁紧释放部分的开闭。作为锁紧释放部分,四个相同的六杆机构对称地均布于箱体底部,实现对托架的锁紧与释放。
如图4所示为锁紧部分的锁紧状态图4a与释放状态图4b示意图。其中连杆43与箱体1固定连接,构件45为直角连杆,锁紧时如(图4a)所示压紧托架5的边缘,从而实现对托架的锁紧。此时,连杆39与连杆41共线,转动副42、转动副40、转动副51共线,由此形成典型的自锁状态。释放时如(图4b)所示,由联动部分通过连杆15带动连杆37向右移动,连杆37带动连杆39顺时针转动,使连杆39与连杆41脱离共线状态,解除了自锁。连杆50在连杆39的拉动下,绕转动副44逆时针旋转,带动连杆48向右侧移动,进而使连杆45逆时针旋转,从而托架解除锁紧状态。
图5所示为联动部分锁紧状态(图5a)与解锁状态(图5b)的示意图,该部分通过一个由多组平行四边形机构组成的联动机构来控制锁紧释放部分运动。具体的,连杆16、连杆31与箱体固连,手柄8与连杆10固定连接,手柄8、连杆10通过转动副9与连杆16连接,转动手柄8将扭矩传递到连杆10,连杆10绕转动副旋转,进而使串联的平行四边形联动机构整体转动,连杆17与连杆34在水平方向运动,再通过连接部件将运动传递到锁紧释放部分。
海洋平台撤离系统进行回收作业时,用动力机械装置先将托架从海上吊回高于连杆45的位置,转动手柄8将机构锁紧,再将托架下放,使托架边缘与连杆45贴合,处于自锁位置的机构将托架锁紧。
对图3,所述锁紧释放机构于箱体底部对称布置,一共四组。
对照图3,所述连接部件由四个相同的连杆均匀布置,所述连接部件即连杆37,连杆37通过圆柱副32与连杆34连接,连接部件37将联动部分与锁紧释放部分连接在一起,实现联动部分对锁紧释放部分的控制作用。
实现锁紧与释放功能过程:
如图5所示,旋转操作所述手柄8,与手柄固定连接的连杆10沿转动副9旋转,显然的,连杆14、连杆19、连杆27、连杆29、连杆35绕旋转中心跟随连杆10同向转动。
机构锁紧状态下,锁紧释放部分如图4a所示,联动部分如图5a所示,此时顺时针转动手柄8,则连杆10、连杆14、连杆19、连杆27、连杆29、连杆35绕各自旋转中心顺时针旋转,连杆17向右运动,连杆34向左运动,通过连接部件37带动锁紧释放机构(如图4所示)中连杆39顺时针旋转运动,使连杆39与连杆41脱离共线状态,解除了自锁。连杆50在连杆39的拉动下,绕转动副44逆时针旋转,带动连杆48向右侧移动,进而使连杆45逆时针旋转,从而托架解除锁紧状态。
机构释放状态下,锁紧释放部分如图4b所示,联动部分如图5b所示,此时逆时针转动手柄8,则连杆10、连杆14、连杆19、连杆27、连杆29、连杆35绕各自旋转中心逆时针旋转,连杆17向左运动,连杆34向右运动,通过连接部件37带动锁紧释放机构中连杆39逆时针时针旋转运动,连杆、41连杆50在连杆39的带动下顺时针旋转,连杆51带动连杆48向左运动,连杆48带动连杆45顺时针旋转,连杆39与连杆41达成共线,机构处于自锁状态,将托架锁紧固定。
海洋平台撤离系统锁紧释放机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0