








专利摘要
本发明公开一种无人艇布放回收系统。该无人艇布放回收系统包括与母船的吊索连接的对接头和安装于无人艇上的弹射机构、弹射头、云台机构、对接机构和牵引线;所述弹射机构安装在所述云台机构上,所述云台结构用于调整所述弹射机构的弹射角度;所述牵引线的一端与所述弹射机构固定连接,另一端与弹射头连接;所述牵引线用于导引所述对接头嵌入到所述对接机构中;所述弹射机构用于将所述弹射头弹射到所述母船上;所述对接机构用于固定所述对接头,从而将所述无人艇固定在所述吊索上。本发明公开的无人艇布放回收系统可以提高无人艇的布放回收效率。
权利要求
1.一种无人艇布放回收系统,其特征在于,包括与母船的吊索连接的对接头和安装于无人艇上的弹射机构、弹射头、云台机构、对接机构和牵引线;所述弹射机构安装在所述云台机构上,所述云台结构用于调整所述弹射机构的弹射角度;所述牵引线的一端与所述弹射机构固定连接,另一端与弹射头连接;所述牵引线用于导引所述对接头嵌入到所述对接机构中;所述弹射机构用于将所述弹射头弹射到所述母船上;所述对接机构用于固定所述对接头,从而将所述无人艇固定在所述吊索上。
2.根据权利要求1所述的一种无人艇布放回收系统,其特征在于,所述弹射机构包括弹射架和弹射头夹持装置;所述弹射架包括两个弹射臂,每个弹射臂上均固定连接有弹射皮筋,每个所述弹射皮筋的尾端均连接在弹射片上;所述弹射片用于包裹住所述弹射头,所述弹射头夹持装置用于夹持住所述弹射头和所述弹射片,使所述弹射皮筋处于紧绷状态;弹射时,所述弹射头夹持装置松开所述弹射头和所述弹射片,所述弹射片和所述弹射皮筋将所述弹射头弹射到所述母船上。
3.根据权利要求2所述的一种无人艇布放回收系统,其特征在于,所述弹射头夹持装置包括夹持钳、第一凸轮块、凸轮轴和第一电机;所述弹射头嵌在所述夹持钳的钳嘴中,所述第一凸轮块嵌在所述夹持钳的尾端;所述凸轮轴与所述第一凸轮块固定连接;所述凸轮轴与所述第一电机输出轴固定连接;所述第一电机转动时通过所述凸轮轴带动所述第一凸轮块转动,从而调节所述夹持钳尾端的张合,进而控制所述钳嘴的打开与闭合。
4.根据权利要求2所述的一种无人艇布放回收系统,其特征在于,所述弹射机构还包括摄像头;所述摄像头朝向所述弹射机构的弹射方向,用于瞄准所述母船。
5.根据权利要求1所述的一种无人艇布放回收系统,其特征在于,所述云台机构包括底座、水平方向调节电机、水平转动板、竖直方向调节电机和竖直转动板;水平方向调节电机固定在所述底座上;所述水平转动板与所述水平方向调节电机的输出轴固定连接;所述竖直方向调节电机固定连接在所述水平转动板上;所述竖直转动板与所述竖直方向调节电机的输出轴固定连接;所述弹射机构固定在所述竖直转动板上。
6.根据权利要求1所述的一种无人艇布放回收系统,其特征在于,所述对接机构包括对接筒、喇叭口和对接头固定装置;所述喇叭口开口朝上安装于所述对接筒顶部,所述喇叭口的形状与所述对接头的形状相匹配,所述牵引线固定在所述对接筒内,所述对接头固定装置安装于所述对接筒侧面,用于固定所述对接头;在所述对接筒上部的侧面设置有第一卡接口,所述对接头的窄端设置有第二卡接口,当所述对接头对接到所述对接筒上时,所述第一卡接口和所述第二卡接口连通,所述对接头固定装置通过卡入所述第一卡接口内卡住所述第二卡接口实现对所述对接头的固定。
7.根据权利要求6所述的一种无人艇布放回收系统,其特征在于,所述对接头固定装置包括卡爪、第二电机、第二凸轮块和弹簧;
所述卡爪包括卡爪前端、卡爪后端和卡爪转轴;所述卡爪转轴位于所述卡爪前端和所述卡爪后端之间;所述卡爪前端与所述第一卡接口对应,用于伸入所述第一卡接口内卡住所述第二卡接口;所述弹簧与所述卡爪前端连接,用于拉住卡爪前端使卡爪前端伸入所述第一卡接口内;所述第二电机的输出轴与所述第二凸轮块连接,所述第二凸轮块与所述卡爪后端接触连接;所述第二电机的输出轴转动带动所述第二凸轮块转动,使所述卡爪后端绕所述卡爪转轴转动,带动所述卡爪前端绕所述卡爪转轴转动。
8.根据权利要求7所述的一种无人艇布放回收系统,其特征在于,所述卡爪的数量为两个;两个所述卡爪分布在所述对接筒的两侧且相对设置;在每个所述卡爪的卡爪转轴上均固定连接一个不完全齿轮,两个所述不完全齿轮相对设置且互相咬合;当所述第二电机驱动其中一个卡爪转动时,通过两个所述不完全齿轮带动另一个卡爪转动。
说明书
技术领域
本发明涉及无人艇技术领域,特别是涉及一种无人艇布放回收系统。
背景技术
进入21世纪以来,随着人们对海洋资源的重视,对海洋资源的开发力度不断加大,并不断向深海、远海延伸,从而使无人艇技术得到了飞速发展。目前,在军事、海洋科考、海底勘探等领域,无人艇已得到广泛应用。但无人艇的高效快速布放回收一直是一个难题,特别是当海上风浪大,环境恶劣时,无人艇无法实现与母船的快速对接,导致无人艇布放回收的效率较低。
发明内容
本发明的目的是提供一种无人艇布放回收系统,提高了无人艇的布放回收的效率。
为实现上述目的,本发明提供了如下方案:
一种无人艇布放回收系统,包括与母船的吊索连接的对接头和安装于无人艇上的弹射机构、弹射头、云台机构、对接机构和牵引线;所述弹射机构安装在所述云台机构上,所述云台结构用于调整所述弹射机构的弹射角度;所述牵引线的一端与所述弹射机构固定连接,另一端与弹射头连接;所述牵引线用于导引所述对接头嵌入到所述对接机构中;所述弹射机构用于将所述弹射头弹射到所述母船上;所述对接机构用于固定所述对接头,从而将所述无人艇固定在所述吊索上。
可选的,所述弹射机构包括弹射架和弹射头夹持装置;所述弹射架包括两个弹射臂,每个弹射臂上均固定连接有弹射皮筋,每个所述弹射皮筋的尾端均连接在弹射片上;所述弹射片用于包裹住所述弹射头,所述弹射头夹持装置用于夹持住所述弹射头和所述弹射片,使所述弹射皮筋处于紧绷状态;弹射时,所述弹射头夹持装置松开所述弹射头和所述弹射片,所述弹射片和所述弹射皮筋将所述弹射头弹射到所述母船上。
可选的,所述弹射头夹持装置包括夹持钳、第一凸轮块、凸轮轴和第一电机;所述弹射头嵌在所述夹持钳的钳嘴中,所述第一凸轮块嵌在所述夹持钳的尾端;所述凸轮轴与所述第一凸轮块固定连接;所述凸轮轴与所述第一电机输出轴固定连接;所述第一电机转动时通过所述凸轮轴带动所述第一凸轮块转动,从而调节所述夹持钳尾端的张合,进而控制所述钳嘴的打开与闭合。
可选的,所述弹射机构还包括摄像头;所述摄像头朝向所述弹射机构的弹射方向,用于瞄准所述母船。
可选的,所述云台机构包括底座、水平方向调节电机、水平转动板、竖直方向调节电机和竖直转动板;水平方向调节电机固定在所述底座上;所述水平转动板与所述水平方向调节电机的输出轴固定连接;所述竖直方向调节电机固定连接在所述水平转动板上;所述竖直转动板与所述竖直方向调节电机的输出轴固定连接;所述弹射机构固定在所述竖直转动板上。
可选的,所述对接机构包括对接筒、喇叭口和对接头固定装置;所述喇叭口开口朝上安装于所述对接筒顶部,所述喇叭口的形状与所述对接头的形状相匹配,所述牵引线固定在所述对接筒内,所述对接头固定装置安装于所述对接筒侧面,用于固定所述对接头;在所述对接筒上部的侧面设置有第一卡接口,所述对接头的窄端设置有第二卡接口,当所述对接头对接到所述对接筒上时,所述第一卡接口和所述第二卡接口连通,所述对接头固定装置通过卡入所述第一卡接口内卡住所述第二卡接口实现对所述对接头的固定。
可选的,所述对接头固定装置包括卡爪、第二电机、第二凸轮块和弹簧;
所述卡爪包括卡爪前端、卡爪后端和卡爪转轴;所述卡爪转轴位于所述卡爪前端和所述卡爪后端之间;所述卡爪前端与所述第一卡接口对应,用于伸入所述第一卡接口内卡住所述第二卡接口;所述弹簧与所述卡爪前端连接,用于拉住卡爪前端使卡爪前端伸入所述第一卡接口内;所述第二电机的输出轴与所述第二凸轮块连接,所述第二凸轮块与所述卡爪后端接触连接;所述第二电机的输出轴转动带动所述第二凸轮块转动,使所述卡爪后端绕所述卡爪转轴转动,带动所述卡爪前端绕所述卡爪转轴转动。
可选的,所述卡爪的数量为两个;两个所述卡爪分布在所述对接筒的两侧且相对设置;在每个所述卡爪的卡爪转轴上均固定连接一个不完全齿轮,两个所述不完全齿轮相对设置且互相咬合;当所述第二电机驱动其中一个卡爪转动时,通过两个所述不完全齿轮带动另一个卡爪转动。
根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明公开的无人艇布放回收系统,包括与母船的吊索固定连接的对接头和安装于无人艇上的弹射机构、弹射头、云台机构、对接机构和牵引线;所述弹射机构安装在所述云台机构上,所述云台结构用于调整所述弹射机构的弹射角度;所述牵引线的一端与所述弹射机构固定连接,另一端与弹射头固定连接;所述牵引线用于导引所述对接头嵌入到所述对接机构中;所述弹射机构用于将所述弹射头弹射到所述母船上;所述对接机构用于固定所述对接头,从而将所述无人艇固定在所述吊索上。本发明公开的无人艇布放回收系统,在布放时可直接将无人艇布放到水面上,在回收时利用牵引线将对接头引导到对接机构上,实现了快速对接,从而提高了无人艇的布放回收的效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明无人艇布放回收系统实施例的系统结构图;
图2为本发明无人艇布放回收系统实施例的弹射机构的外部结构图;
图3为本发明无人艇布放回收系统实施例的弹射机构的内部结构图;
图4为本发明无人艇布放回收系统实施例的夹持钳的钳嘴打开状态下的结构图;
图5为本发明无人艇布放回收系统实施例的夹持钳的钳嘴闭合状态下的结构图;
图6为本发明无人艇布放回收系统实施例的云台机构的结构图;
图7为本发明无人艇布放回收系统实施例的对接机构的整体结构图;
图8为本发明无人艇布放回收系统实施例的对接机构的外部结构图;
图9为本发明无人艇布放回收系统实施例的对接机构的内部结构图;
图10为本发明无人艇布放回收系统实施例的无人艇布放时无人艇下降过程的示意图;
图11为本发明无人艇布放回收系统实施例的无人艇布放时无人艇下降完成后回收对接头的示意图;
图12为本发明无人艇布放回收系统实施例的无人艇回收时弹射机构瞄准母船的示意图;
图13为本发明无人艇布放回收系统实施例的无人艇回收时弹射机构弹出弹射头的示意图;
图14为本发明无人艇布放回收系统实施例的无人艇回收时对接头沿牵引线下滑的示意图;
图15为本发明无人艇布放回收系统实施例的无人艇回收时将对接头与对接机构对接的示意图;
图16为本发明无人艇布放回收系统实施例的无人艇回收时起吊无人艇的示意图。
图中的附图标记为:母船1、吊索2、对接头3、无人艇4、弹射机构5、弹射头6、云台机构7、对接机构8、牵引线9、弹射架10、弹射头夹持装置11、摄像头12、弹射臂13、弹射皮筋14、弹射片15、弹射机构后板16、夹持钳17、第一凸轮块18、凸轮轴19、第一电机20、弹性装置21、左夹臂22、右夹臂23、钳轴24、电机座板25、手动装置26、底座27、水平方向调节电机28、水平转动板29、竖直方向调节电机30、竖直转动板31、水平转轴32、固定板33、竖直转轴34、对接筒35、喇叭口36、对接头固定装置37、第一卡接口38、第二卡接口39、卡爪40、第二电机41、第二凸轮块42、弹簧43、卡爪前端44、卡爪后端45、卡爪转轴46、不完全齿轮47、卡块48。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
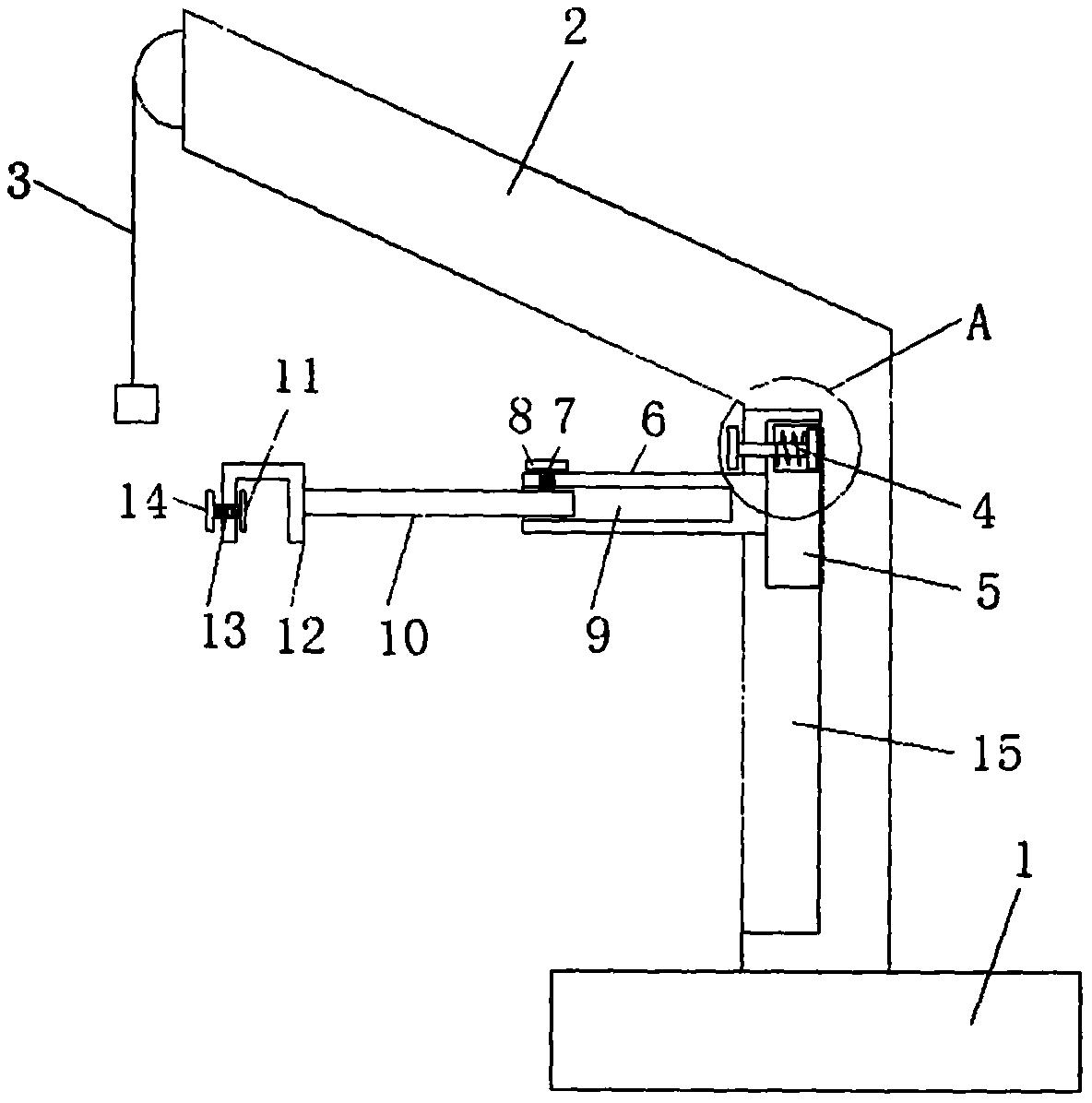
图1为本发明无人艇布放回收系统实施例的系统结构图。
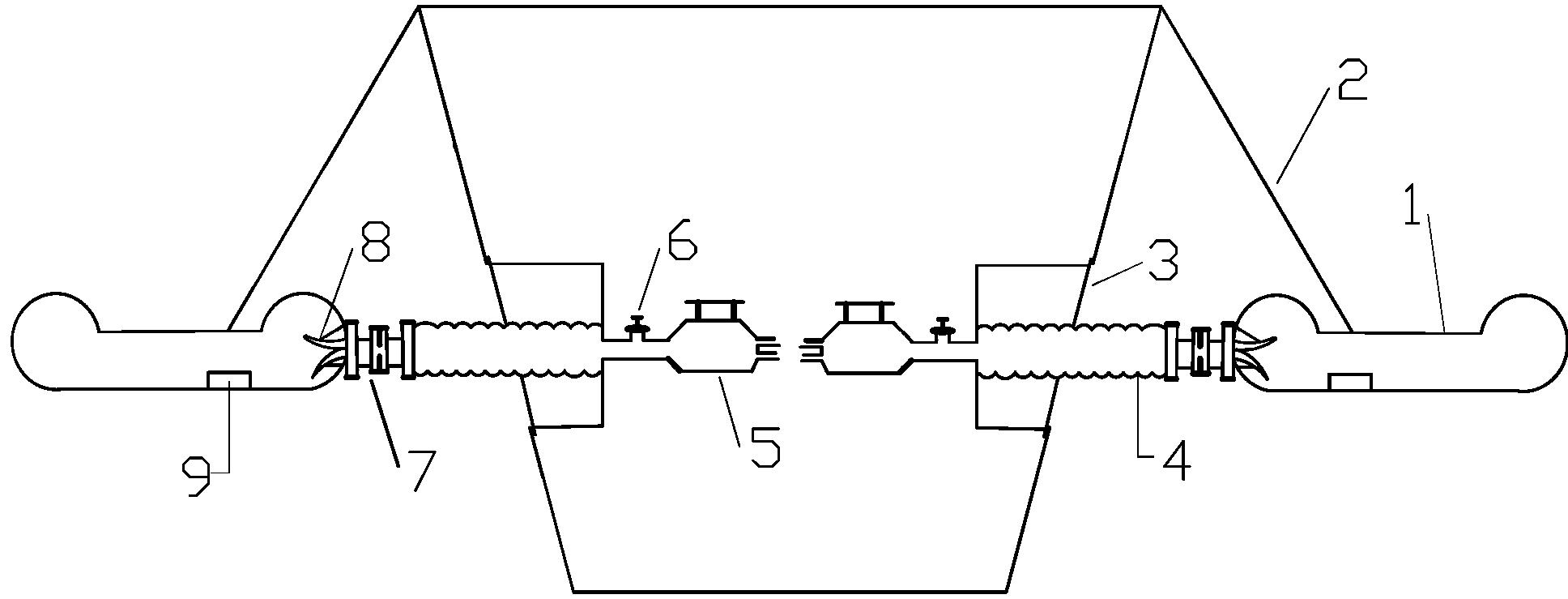
参见图1,该无人艇布放回收系统,可以应用于3吨级或7.5m长无人艇的快速布放回收。该无人艇布放回收系统包括与母船1的吊索2连接的对接头3和安装于无人艇4上的弹射机构5、弹射头6、云台机构7、对接机构8和牵引线9;所述弹射机构5安装在所述云台机构7上,所述云台结构用于调整所述弹射机构5的弹射角度;所述牵引线9的一端与所述弹射机构5固定连接,另一端与弹射头6连接;所述牵引线9用于导引所述对接头3嵌入到所述对接机构8中;所述弹射机构5用于将所述弹射头6弹射到所述母船1上;所述对接机构8用于固定所述对接头3,从而将所述无人艇4固定在所述吊索2上。
本发明的无人艇布放回收系统可以实现4级海况下无人艇的安全可靠地布放回收。
图2为本发明无人艇布放回收系统实施例的弹射机构的外部结构图。
图3为本发明无人艇布放回收系统实施例的弹射机构的内部结构图。
图4为本发明无人艇布放回收系统实施例的夹持钳的钳嘴打开状态下的结构图。
图5为本发明无人艇布放回收系统实施例的夹持钳的钳嘴闭合状态下的结构图。
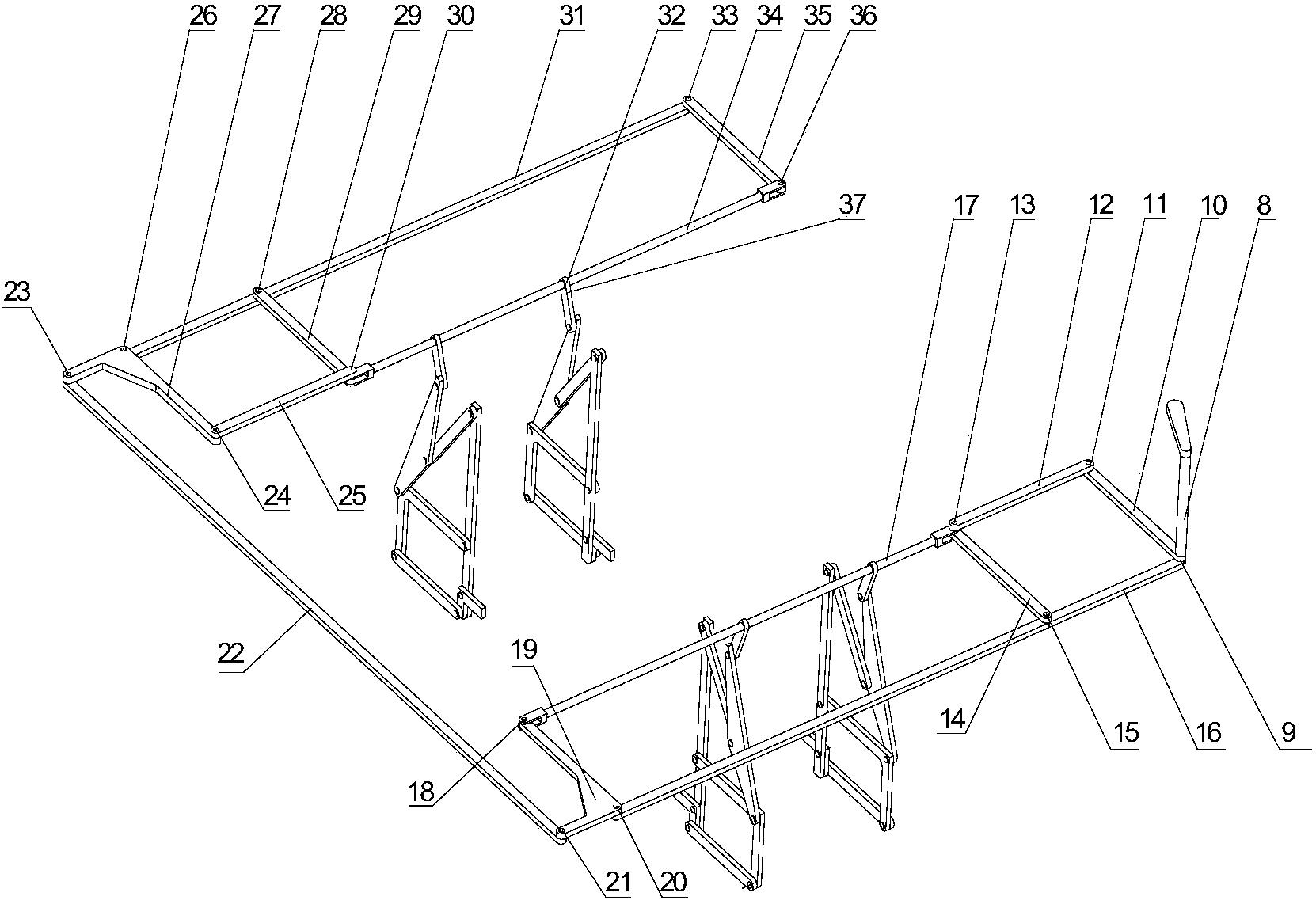
参见图2~图5,所述弹射机构5包括弹射架10、弹射头夹持装置11和摄像头12;所述弹射架10包括两个弹射臂13,每个弹射臂13上均固定连接有弹射皮筋14,每个所述弹射皮筋14的尾端均连接在弹射片15上;所述弹射片15用于包裹住所述弹射头6,所述弹射头夹持装置11用于夹持住所述弹射头6和所述弹射片15,使所述弹射皮筋14处于紧绷状态;弹射时,所述弹射头夹持装置11松开所述弹射头6和所述弹射片15,所述弹射片15和所述弹射皮筋14将所述弹射头6弹射到所述母船1上。
所述弹射架10固定在弹射机构后板16上;所述弹射机构后板16固定在所述云台机构7上。
所述弹射头夹持装置11包括夹持钳17、第一凸轮块18、凸轮轴19和第一电机20;所述弹射头6嵌在所述夹持钳17的钳嘴中,所述第一凸轮块18嵌在所述夹持钳17的尾端;所述凸轮轴19与所述第一凸轮块18固定连接;所述凸轮轴19与所述第一电机20输出轴固定连接;所述第一电机20转动时通过所述凸轮轴19带动所述第一凸轮块18转动,从而调节所述夹持钳17尾端的张合,进而控制所述钳嘴的打开与闭合。所述夹持钳17尾端通过弹性装置21连接在所述弹射架10上;所述弹性装置21对所述夹持钳17尾端施加弹力使所述夹持钳17尾端有闭合的趋势。所述夹持钳17包括左夹臂22、右夹臂23和钳轴24;所述左夹臂22和所述右夹臂23通过所述钳轴24连接,且所述左夹臂22的钳嘴和所述右夹臂23的钳嘴相对设置,所述左夹臂22的尾端和所述右夹臂23的尾端相对设置;所述左夹臂22和所述右夹臂23均可绕所述钳轴24转动。所述第一电机20固定在电机座板25上,所述电机座板25固定在所述弹射机构后板16上。
所述摄像头12设置在所述弹射机构后板16上,且所述摄像头12朝向所述弹射机构5的弹射方向,用于瞄准所述母船1。
所述弹射机构5还包括手动装置26,所述手动装置26与所述凸轮轴19连接;所述手动装置26用于手动控制所述凸轮轴19的转动。当在母船1上控制所述弹射机构5或者不适用通过第一电机20进行控制时,可以利用所述手动装置26进行控制。
弹射机构5的材料大部分为铝合金YL12,部分难加工零件和标准件材料为不锈钢316,弹射机构5的总重在2.5KG左右,具体尺寸为600mm*150mm*250mm。
图6为本发明无人艇布放回收系统实施例的云台机构的结构图。
参见图6,所述云台机构7包括底座27、水平方向调节电机28、水平转动板29、竖直方向调节电机30和竖直转动板31;水平方向调节电机28固定在所述底座27上;所述水平转动板29通过水平转轴32与所述水平方向调节电机28的输出轴固定连接;所述竖直方向调节电机30通过固定板33固定连接在所述水平转动板29上;所述竖直转动板31通过竖直转轴与所述竖直方向调节电机30的输出轴固定连接;所述弹射机构5固定在所述竖直转动板31上。
云台机构7的尺寸为200mm*200mm*400mm,质量为5KG。
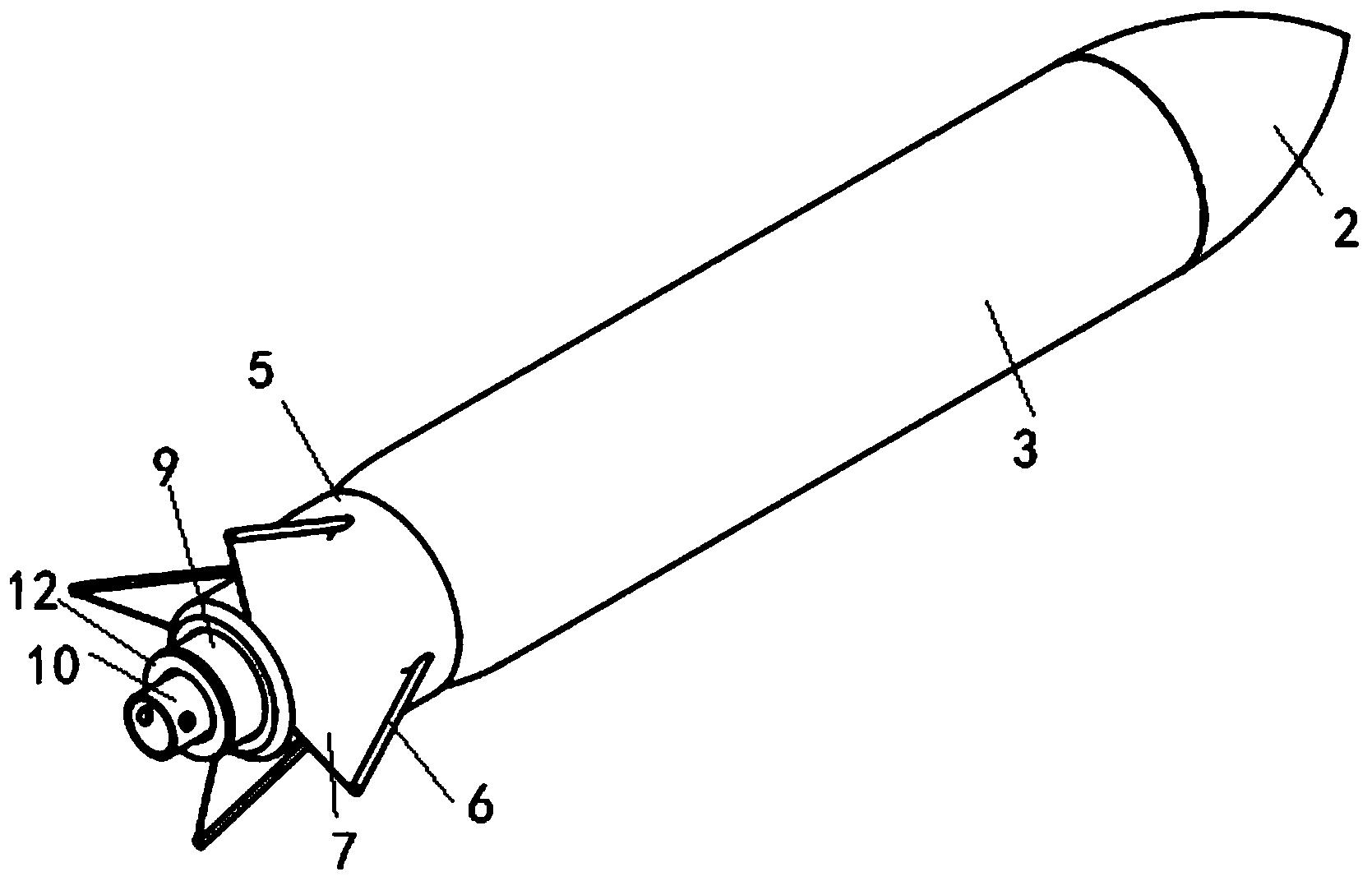
图7为本发明无人艇布放回收系统实施例的对接机构的整体结构图。
图8为本发明无人艇布放回收系统实施例的对接机构的外部结构图。
图9为本发明无人艇布放回收系统实施例的对接机构的内部结构图。
参见图7、图8和图9,所述对接机构8包括对接筒35、喇叭口36和对接头固定装置37;所述喇叭口36开口朝上安装于所述对接筒35顶部,所述喇叭口36的形状与所述对接头3的形状相匹配,所述牵引线9固定在所述对接筒35内,所述对接头固定装置37安装于所述对接筒35侧面,用于固定所述对接头3;在所述对接筒35上部的侧面设置有第一卡接口38,所述对接头3的窄端设置有第二卡接口39,当所述对接头3对接到所述对接筒35上时,所述第一卡接口38和所述第二卡接口39连通,所述对接头固定装置37通过卡入所述第一卡接口38内卡住所述第二卡接口39实现对所述对接头3的固定。
所述对接头固定装置37包括卡爪40、第二电机41、第二凸轮块42和弹簧43;
所述卡爪40包括卡爪前端44、卡爪后端45和卡爪转轴46;所述卡爪转轴46位于所述卡爪前端44和所述卡爪后端45之间;所述卡爪前端44与所述第一卡接口38对应,用于伸入所述第一卡接口38内卡住所述第二卡接口39;所述弹簧43与所述卡爪前端44连接,用于拉住卡爪前端44使卡爪前端44伸入所述第一卡接口38内;所述第二电机41的输出轴与所述第二凸轮块42连接,所述第二凸轮块42与所述卡爪后端45接触连接;所述第二电机41的输出轴转动带动所述第二凸轮块42转动,使所述卡爪后端45绕所述卡爪转轴46转动,带动所述卡爪前端44绕所述卡爪转轴46转动。
具体地,所述第二卡接口39沿周向环绕所述对接头3一周。
所述卡爪40的数量为两个;两个所述卡爪40分布在所述对接筒35的两侧且相对设置;在每个所述卡爪40的卡爪转轴46上均固定连接一个不完全齿轮47,两个所述不完全齿轮47相对设置且互相咬合;当所述第二电机41驱动其中一个卡爪40转动时,通过两个所述不完全齿轮47带动另一个卡爪40转动。
所述对接头3中心沿轴向设置有一个通孔;所述吊索2和所述牵引线9可以穿过所述通孔;所述吊索2的尾端绑定一个卡块48;所述卡块48的大小大于所述通孔的大小,使吊索2吊起时所述卡块48无法进入所述通孔中,从而带起所述对接头3。所述牵引线9与所述弹射头6的连接为活动连接;当所述弹射头6被弹射到母船1上时,工作人员可以将牵引线9从弹射头6上拆下,使得牵引线9可以穿过所述对接头3的通孔。
对接机构8的材料为不锈钢316,总重在25KG左右,具体尺寸为650mm*450mm*650mm。
图10为本发明无人艇布放回收系统实施例的无人艇布放时无人艇下降过程的示意图。
图11为本发明无人艇布放回收系统实施例的无人艇布放时无人艇下降完成后回收对接头的示意图。
参见图10和图11,在布放之前,弹射头6提前被嵌入到所述弹射头夹持装置11中并卡紧。在布放过程中,对接头3对接在对接机构8上,通过吊索2吊住所述对接头3从而将所述无人艇4下降到水面上。在该过程中,牵引线9被放置在对接头3与喇叭口36之间的缝隙间。在下降完成后,远程控制所述第二电机41的转动使卡爪前端44松开所述对接头3,然后利用吊索2吊起所述对接头3实现所述对接头3的回收。
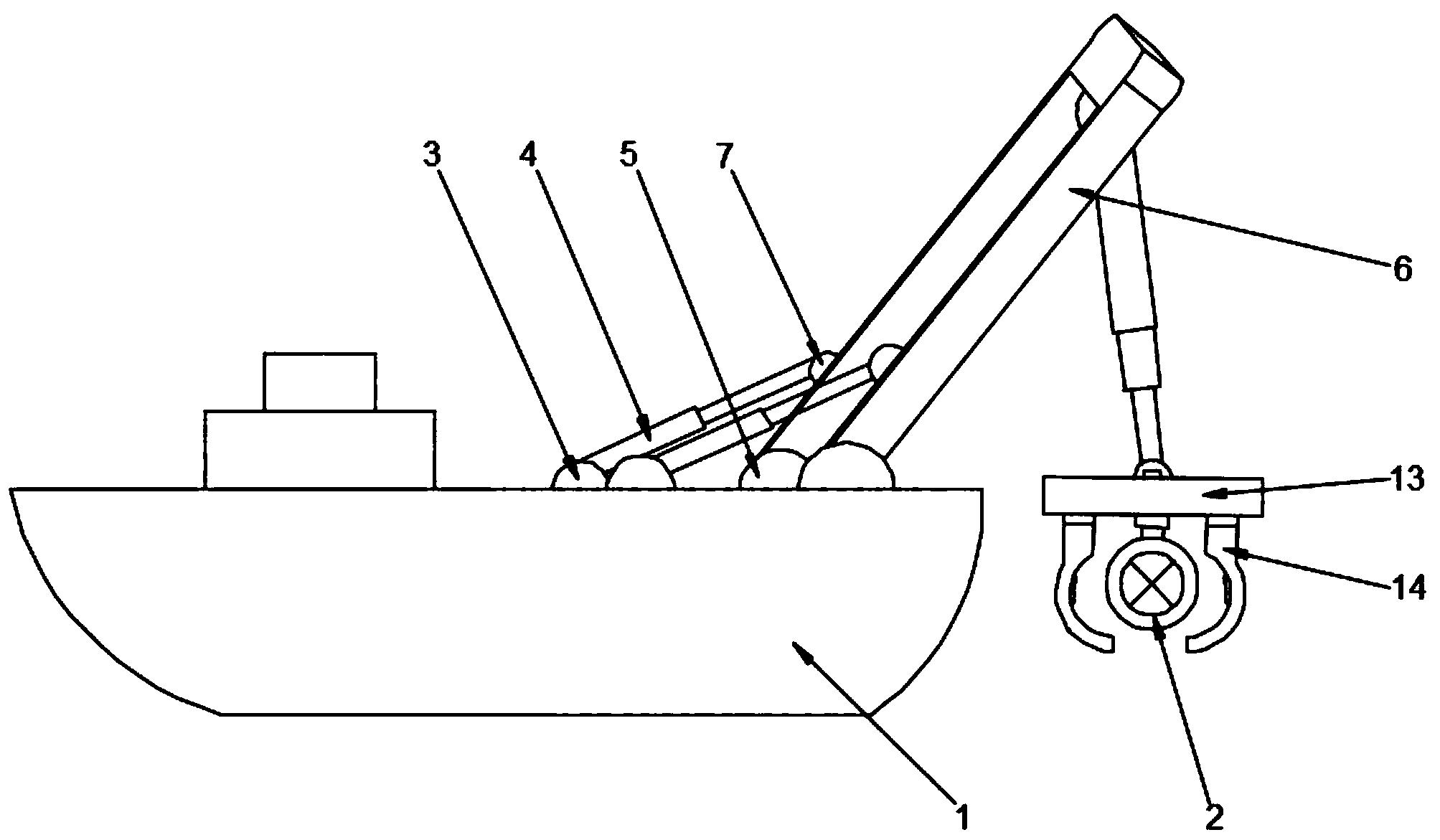
图12为本发明无人艇布放回收系统实施例的无人艇回收时弹射机构瞄准母船的示意图。
图13为本发明无人艇布放回收系统实施例的无人艇回收时弹射机构弹出弹射头的示意图。
图14为本发明无人艇布放回收系统实施例的无人艇回收时对接头沿牵引线下滑的示意图。
图15为本发明无人艇布放回收系统实施例的无人艇回收时将对接头与对接机构对接的示意图。
图16为本发明无人艇布放回收系统实施例的无人艇回收时起吊无人艇的示意图。
参见图12~图16,在无人艇4回收时,操作步骤如下:
A:弹射机构5瞄准母船1。在该过程中,通过遥控云台机构7实现对母船1的瞄准。具体为:通过遥控水平方向调节电机28的转动调节云台机构7的水平方向上的瞄准角度,通过遥控竖直方向调节电机30的转动调节云台机构7竖直方向上的瞄准角度。由于云台机构7与弹射机构后板16固定连接,摄像头12固定在弹射机构后板16上,所以调节云台机构7的角度的同时也相当于在调整摄像头12的瞄准方向和弹射机构5的弹射方向。母船1上的操作人员通过摄像头12采集的图像观察是否瞄准。
B:弹射机构5弹出弹射头6。在该过程中,通过遥控第一电机20的转动使所述夹持钳17的钳嘴张开,从而松开所述弹射头6,所述弹射头6在弹射皮筋14的弹力下被弹射出去。由于提前瞄准了母船1的方向,所述弹射头6被弹射到母船1上。
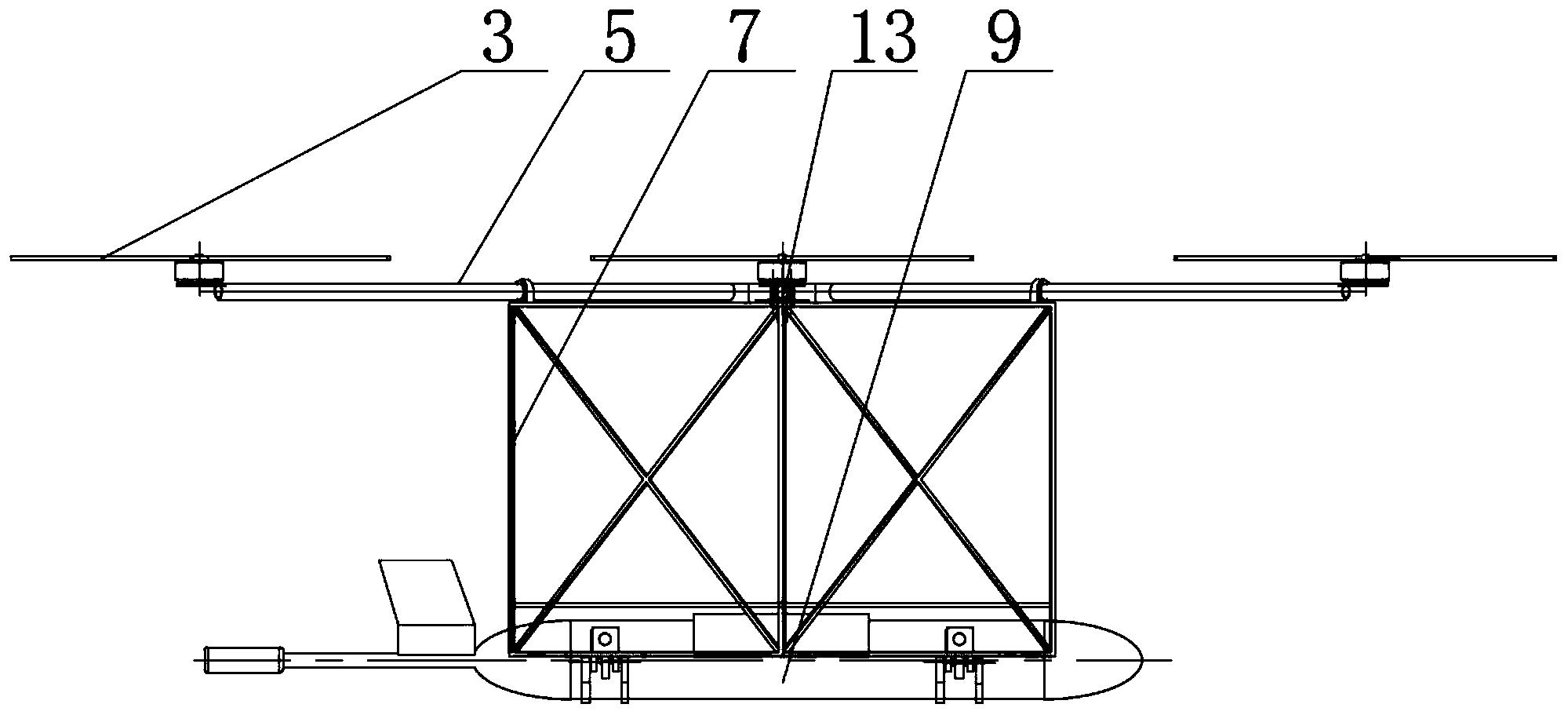
C:对接头3沿牵引线9下滑。在该过程中,首先由母船1上的工作人员将牵引线9从所述弹射头6上拆卸下来,然后将所述牵引线9从下向上穿过对接头3。然后将牵引线9被拆卸下的一端固定到母船1上或重新固定到弹射头6上。之后控制吊索2下降,所述对接头3在重力作用下自动沿牵引线9下降到所述对接机构8的喇叭口36中。由于对接头3与喇叭口36的形状相对应,对接头3在不借助外力的情况下可以实现与喇叭口36的贴合,使第二卡接口39与第一卡接口38对正。
D:将对接头3与对接机构8对接。在该过程中,由于第二卡接口39与第一卡接口38已经对正,只需要遥控第二电机41的转动,带动凸轮块转动,释放凸轮块对卡爪40的压迫力,使卡爪前端44在弹簧43的作用下卡进第一卡接口38和第二卡接口39中,实现对所述对接头3的固定,完成对接。
E:起吊无人艇4。在该过程中,只需要控制吊索2上升,带动对接头3上升,对接头3带动对接机构8上升,对接机构8带动无人艇4上升,完成无人艇4的回收。
本发明公开的无人艇布放回收系统,包括与母船1的吊索2固定连接的对接头3和安装于无人艇4上的弹射机构5、弹射头6、云台机构7、对接机构8和牵引线9;所述弹射机构5安装在所述云台机构7上,所述云台机构7用于调整所述弹射机构5的弹射角度;所述牵引线9的一端与所述弹射机构5固定连接,另一端与弹射头6固定连接;所述牵引线9用于导引所述对接头3嵌入到所述对接机构8中;所述弹射机构5用于将所述弹射头6弹射到所述母船1上;所述对接机构8用于固定所述对接头3,从而将所述无人艇4固定在所述吊索2上。本发明公开的无人艇布放回收系统,在布放时可直接将无人艇4布放到水面上,在回收时利用牵引线9将对接头3引导到对接机构8上,实现了快速对接,从而提高了无人艇4的布放回收的效率。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
一种无人艇布放回收系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0