







专利摘要
本发明公开一种无人艇智能布放回收装置,包括吊装寻迹机构和无人艇中心吊点的夹持机构,吊装寻迹机构包括:矢量变频风机,快速弹射伸缩杆组件,激光指示灯,摄像头,激光测距仪,聚光指示灯,对接锁紧及解锁感应头,快速弹射伸缩杆组件上部设有连接母船的吊钩,下部设置有十字固定架,四个矢量变频风机固定在快速弹射伸缩杆组件下部的十字固定架上,在X轴及Y轴各布放两台矢量变频风机提供水平寻迹动力;激光指示灯、摄像头、激光测距仪、聚光指示灯分别通过快速弹射伸缩杆组件尾部的安装架固定,摄像头带有X轴和Y轴刻度,矢量变频风机分别对应摄像头内的X轴及Y轴刻度方向;对接锁紧及解锁感应头安装在快速弹射伸缩杆组件的后端的凹槽中。
权利要求
1.一种无人艇智能布放回收装置,包括吊装寻迹机构和无人艇中心吊点的夹持机构,其特征在于,所述吊装寻迹机构包括:矢量变频风机(1),快速弹射伸缩杆组件(2),激光指示灯(3),摄像头(4),激光测距仪(5),聚光指示灯(6),对接锁紧及解锁感应头(7),所述快速弹射伸缩杆组件(2)上部设有连接母船的吊钩,下部设置有十字固定架,四个矢量变频风机(1)固定在快速弹射伸缩杆组件(2)下部的十字固定架上,在X轴及Y轴各布放两台矢量变频风机(1)提供水平寻迹动力;所述激光指示灯(3)、摄像头(4)、激光测距仪(5)、聚光指示灯(6)分别通过快速弹射伸缩杆组件(2)尾部的安装架固定,所述摄像头(4)带有X轴和Y轴刻度,所述矢量变频风机(1)分别对应摄像头(4)内的X轴及Y轴刻度方向;对接锁紧及解锁感应头(7)安装在快速弹射伸缩杆组件(2)的后端的凹槽中;所述无人艇中心吊点的夹持机构包括:夹紧块(A2)两孔穿导轨(A4),夹紧块(A2)两端固定在电动推杆(A3)两端,导轨(A4)两端加装弹簧(A5)后固定在上锥体(A1)上,上锥体(A1)通过螺栓(A7)、螺母(A6)与无人艇相连。
说明书
技术领域
本发明涉及一种无人艇智能布放回收装置。
背景技术
现阶段国内外无人机布放回收主要有船机械臂(活节臂式),吊放笼式,弹球系缆式等。
船机械臂(活节臂式)采用长机械臂伸入水面与无人艇的吊点进行对接,这种方法借鉴了国内外多数潜水器的起吊方法,如俄罗斯的6000米“MIR”和美国的“阿尔文”号潜水器,法国的“鹦鹉螺”及日本的“深海2000”及“深海6500”等潜水器都采用这种活节臂式方法。该方法虽然理念简单、成功率高、且技术支持多。但该方法一个缺陷是设备伸缩杆体积太大,占用母船大量甲板空间,设备笨拙,自动化程度较低。
吊放笼式回收方式也是潜水器的回收方式用于无人艇回收,其原理是采用起吊机构把吊笼放入海平面,无人艇辅助自身动力装置开进吊笼,再把吊笼带无作艇一起回收,该方法最大缺点是吊笼体积比无人艇要大得多,在母船甲板上占用太多的甲板空间。如果动力装置控制不太好,回收过程碰撞现象时有发生,要求控制准确度很高,缺点太明显。
弹球系缆式无人艇回收方法是利用无人艇上的弹球向船甲板抛出一根导引缆,再把吊钩顺导向缆引入无人艇吊点,该方法简单,可靠性也高,但需要人力参与,在高海况情况下导入无人艇吊点还是很困难,智能化程度低,作业时间较长。
发明内容
为了克服上述现有技术的不足,本发明提供了一种无人艇智能布放回收装置。利用光电传感器及图像识别算法捕捉计算无人艇起吊点位置,并具快速自动对接锁紧并具解锁吊点的装置。本装置自动寻迹无人艇起吊点,快速伸出伸缩杆到无人艇吊点孔中,自动锁紧及并具解锁功能,对接速度快,占地面积很小,自动化程度高,并且在高海况,高速度情况下也可以完成布放回收任务。
为达到上述目的,本发明所采用的技术方案是:
一种无人艇智能布放回收装置,包括吊装寻迹机构和无人艇中心吊点的夹持机构,所述吊装寻迹机构包括:矢量变频风机,快速弹射伸缩杆组件,激光指示灯,摄像头,激光测距仪,聚光指示灯,对接锁紧及解锁感应头,所述快速弹射伸缩杆组件上部设有连接母船的吊钩,下部设置有十字固定架,四个矢量变频风机固定在快速弹射伸缩杆组件下部的十字固定架上,在X轴及Y轴各布放两台矢量变频风机提供水平寻迹动力;所述激光指示灯、摄像头、激光测距仪、聚光指示灯分别通过快速弹射伸缩杆组件尾部的安装架固定,所述摄像头带有X轴和Y轴刻度,所述矢量变频风机分别对应摄像头内的X轴及Y轴刻度方向;对接锁紧及解锁感应头安装在快速弹射伸缩杆组件的后端的凹槽中;所述无人艇中心吊点的夹持机构包括:夹紧块两孔穿导轨,夹紧块两端固定在电动推杆两端,导轨两端加装弹簧后固定在上锥体上,上锥体通过螺栓与螺母与无人艇相连。
与现有技术相比,本发明的有益效果是:
1)该装置对接速度快:由于采用高级算法,控制器能根据目标位置直接控制执行器捕捉跟踪目标并锁定。
2)人性化操作控制界面:本装置直接显示对接吊点在XOY坐标平面的坐标并显示跟踪过程。
3)环境适应性好:由于采用矢量强力变频风机,通过智能算法能抵抗不确定恶劣海风对本装置的干扰。
4)占用面积小:由于本装置安装4套矢量变频风机及对接杆及传感器部件,再加上智能操作控制单元。仅需要占用较少的甲板空间。
总之,本装置用智能化及自动化装置实现对无人艇的布放回收,极大提高无人艇的布放回收效率,大大减少从员的劳动强度,为无人艇布放回收的未来发展方向。
附图说明
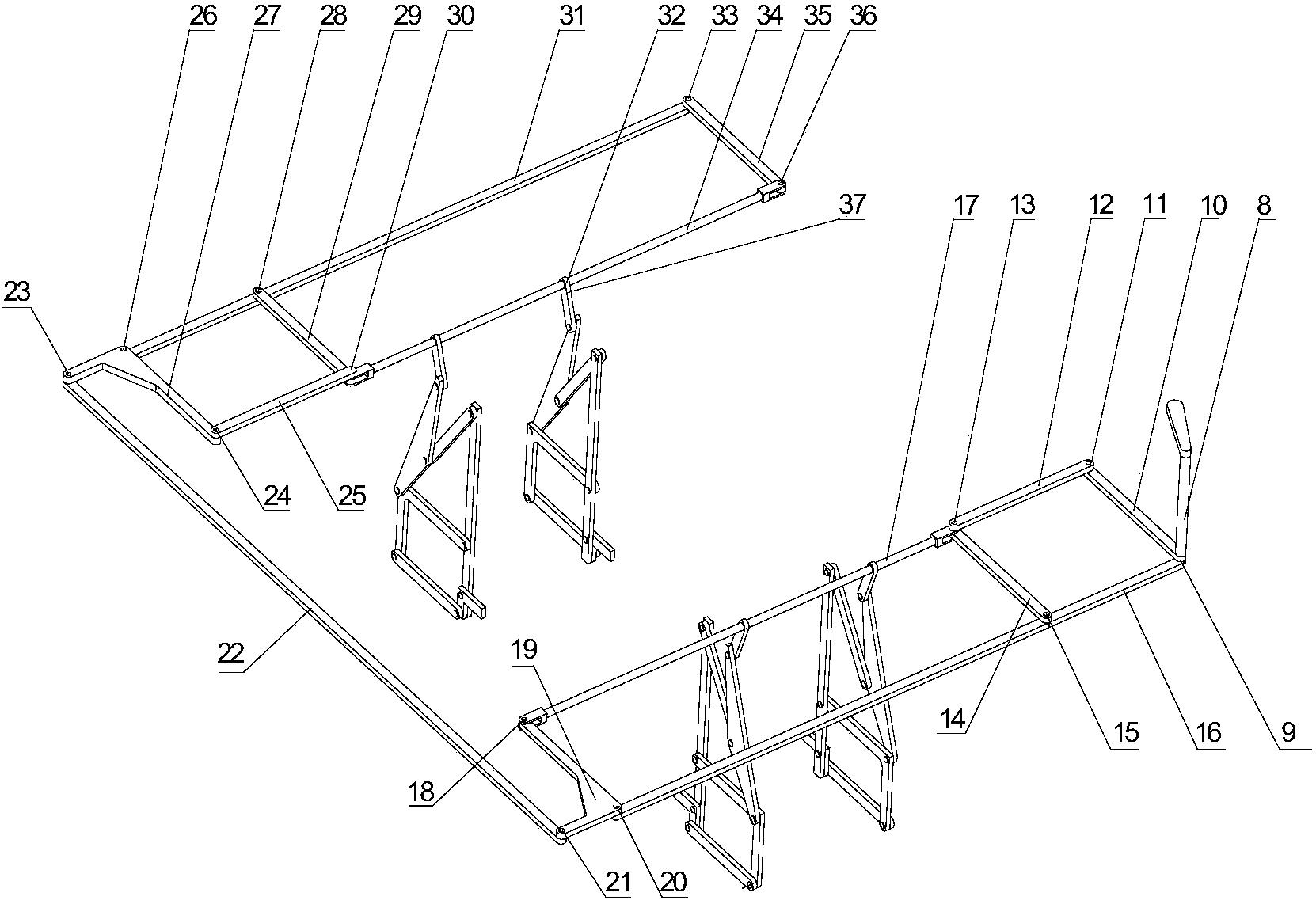
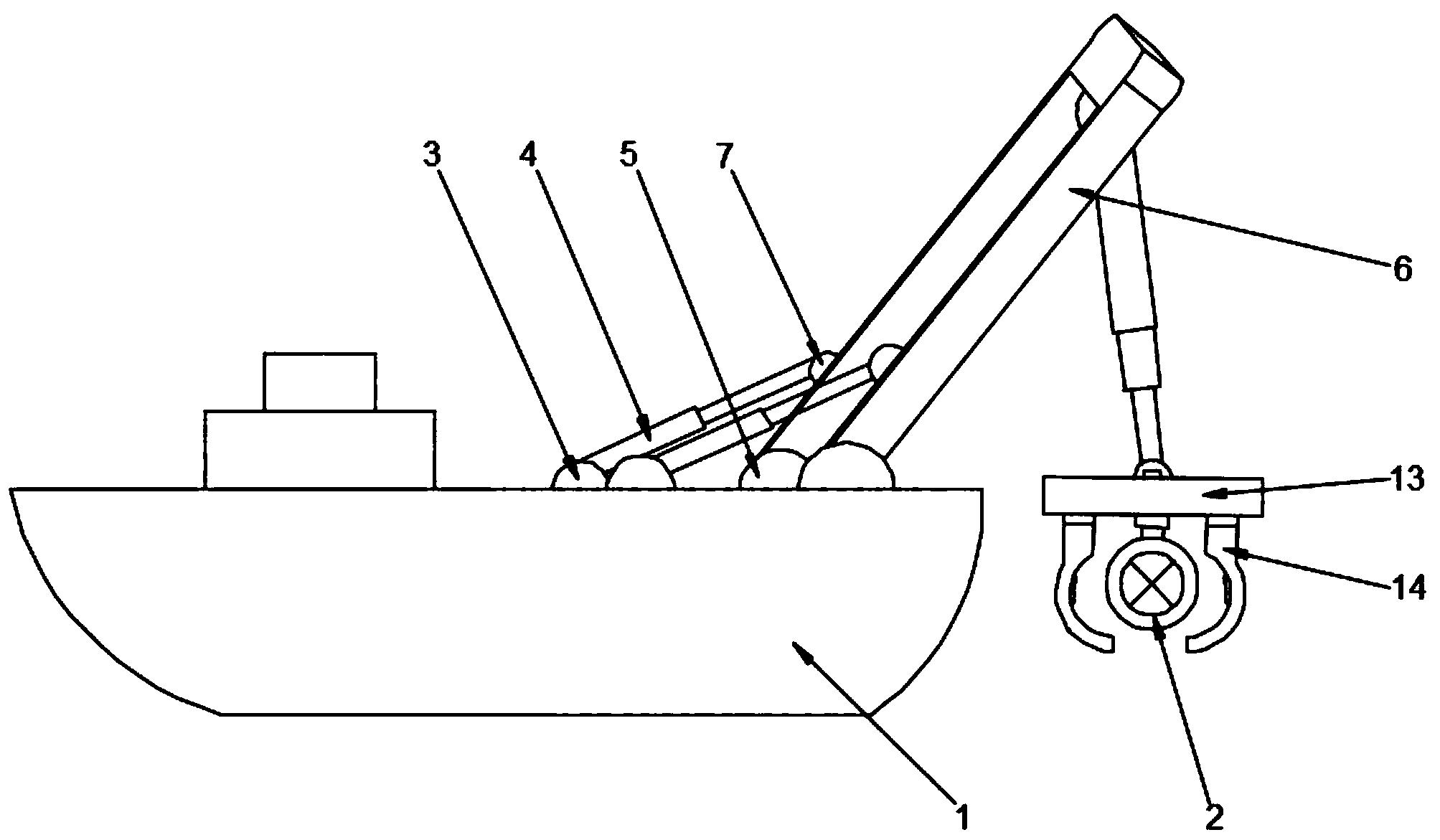
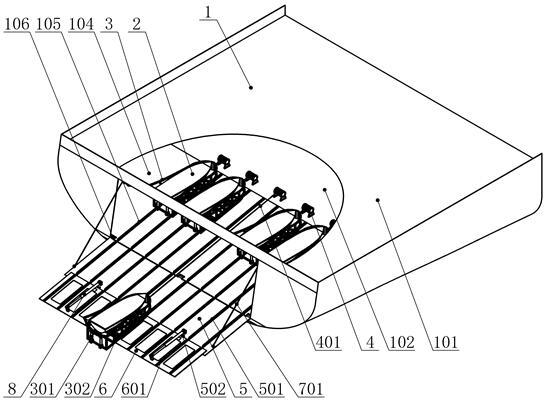
图1为无人艇通过本装置连接母船示意图。
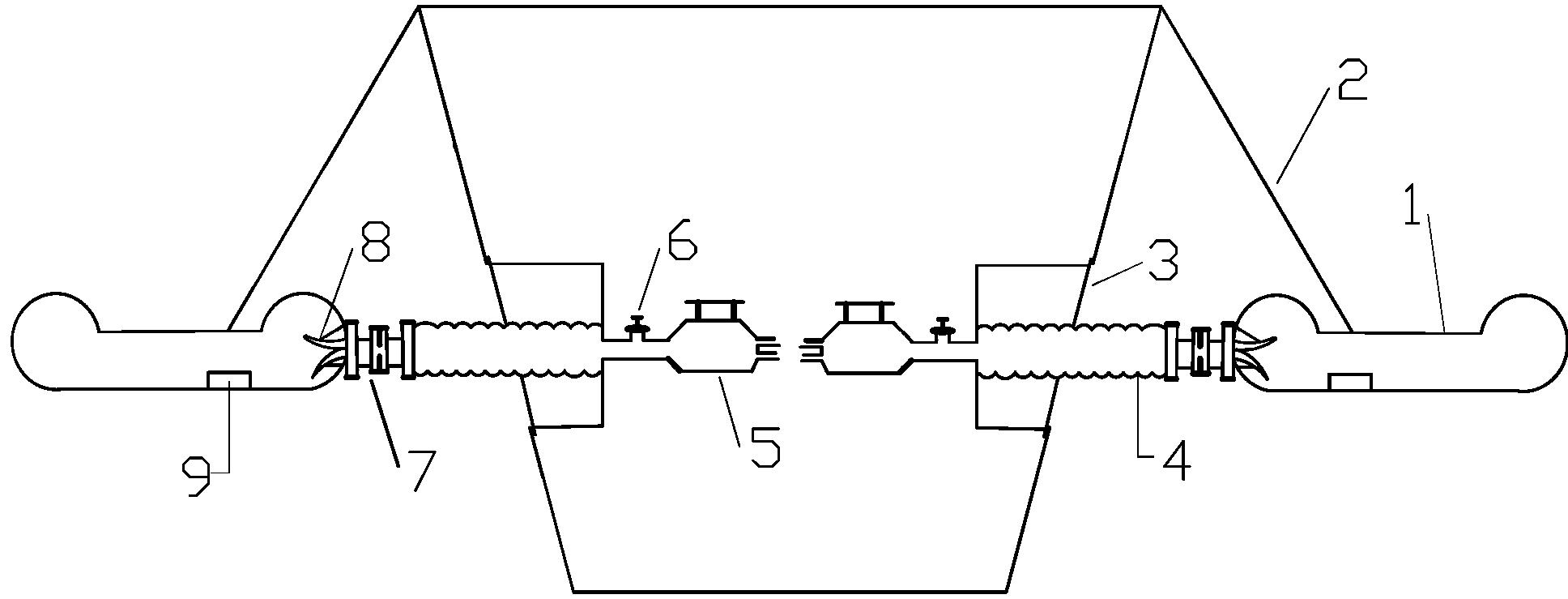
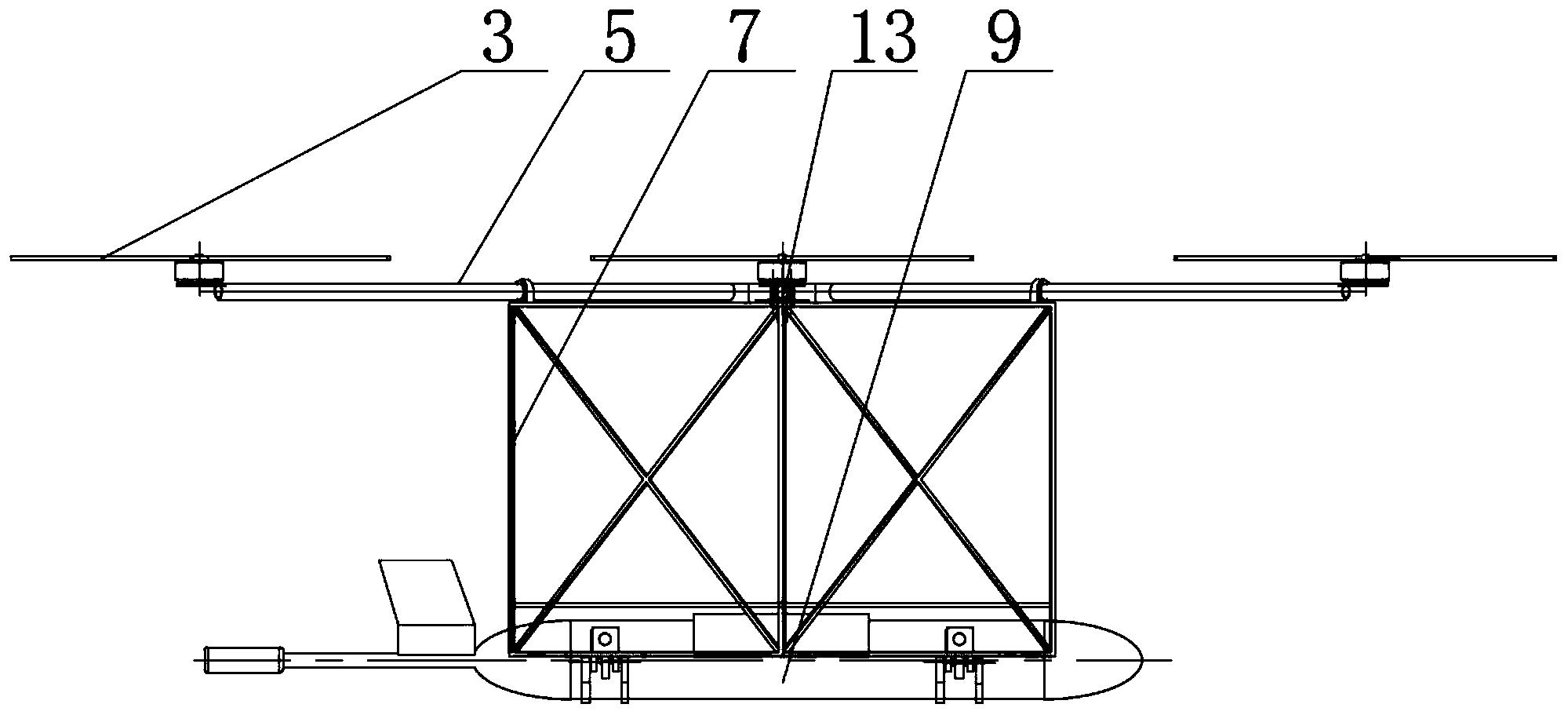
图2为无人艇通过本装置连接母船主视图。
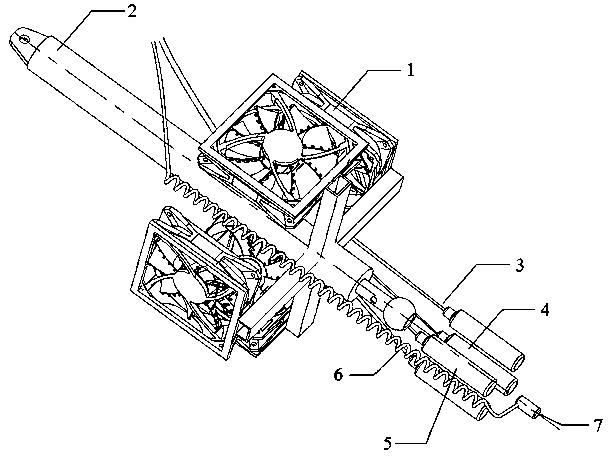
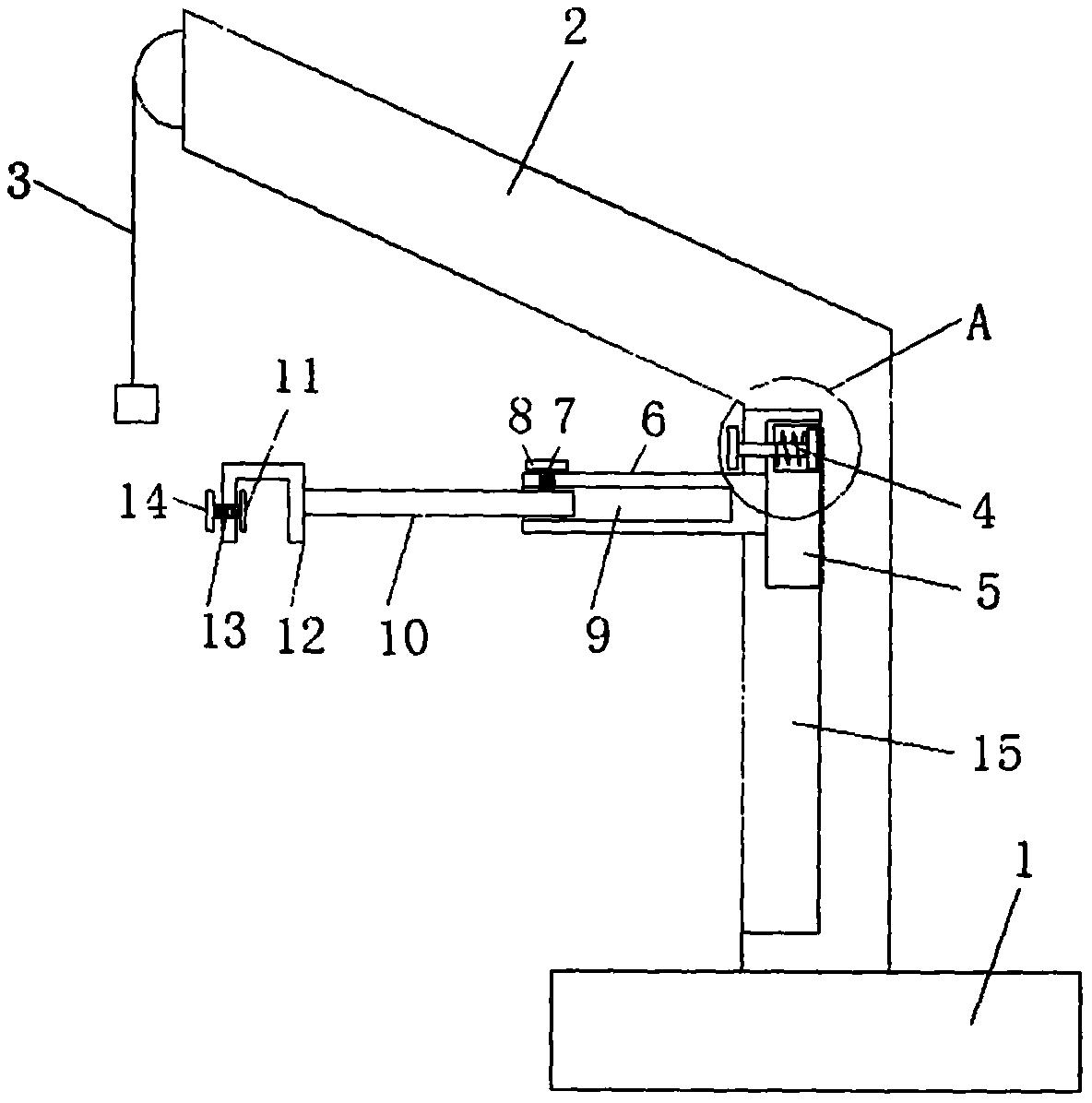
图3为本发明装置吊装寻迹机构结构示意图。
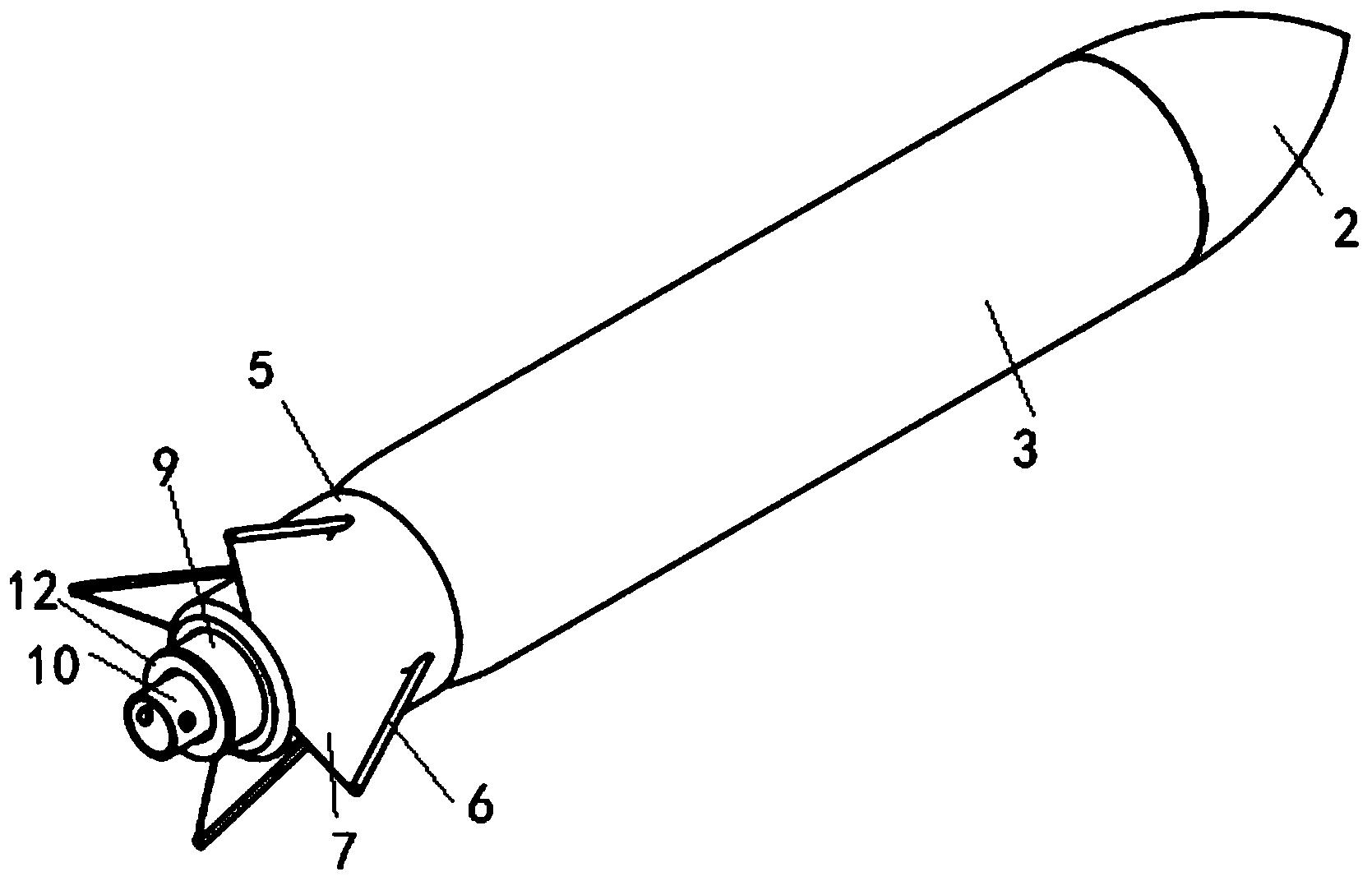
图4为本发明装置无人艇中心吊点的夹持机构示意图。
图5位本发明装置布放阶段流程图。
图6位本发明装置回收阶段流程图。
具体实施方式
下面结合附图,对本发明的具体实施例做进一步的说明。
如图1至图4所示,一种无人艇智能布放回收装置,包括吊装寻迹机构和无人艇中心吊点的夹持机构,所述吊装寻迹机构包括:矢量变频风机1,快速弹射伸缩杆组件2,激光指示灯3,摄像头4,激光测距仪5,聚光指示灯6,对接锁紧及解锁感应头7,所述快速弹射伸缩杆组件2上部设有连接母船的吊钩,下部设置有十字固定架,四个矢量变频风机1固定在快速弹射伸缩杆组件2下部的十字固定架上,在X轴及Y轴各布放两台矢量变频风机1提供水平寻迹动力;所述激光指示灯3、摄像头4、激光测距仪5、聚光指示灯6分别通过快速弹射伸缩杆组件2尾部的安装架固定,所述摄像头4带有X轴和Y轴刻度,所述矢量变频风机1分别对应摄像头4内的X轴及Y轴刻度方向;对接锁紧及解锁感应头7安装在快速弹射伸缩杆组件2的后端的凹槽中;所述无人艇中心吊点的夹持机构包括:夹紧块A2两孔穿导轨A4,夹紧块A2两端固定在电动推杆A3两端,导轨A4两端加装弹簧A5后固定在上锥体A1上,上锥体A1通过螺栓A7与螺母A6与无人艇相连。
各部件功能如下说明:
矢量变频风机1的功能要求为:提供布放回收装置的X向和Y向的矢量控制,另外X向与Y向的推进力要求足够大,能在四级海风中控制装置X向和Y向快速到达无人艇对接位置上方。
快速弹射伸缩杆2的主要功能为:装置到达无人艇对接点上方时,人工或控制器自动控制气缸杆与对接头伸出,而且要求伸出速度要快,以免装置运动太快错过对接位置。
激光指示灯3的主要功能为:在无人艇表面投射出一个红色圆圈,便于装置操作员人工肉眼粗略判断对接装置是否到达对接位置,此功能为辅助功能,如装置自动完成对接则无需要该指示灯。
摄像头4的主要功能为:在有振动的情况下捕捉无人艇中部的对接点位置,并清楚显示在图形上,通过后面的激光测距仪测量得到的高度值,控制器能计算出无人艇对接点的X偏量及Y偏量并实时反馈到执行机构矢量变频风机1寻迹时用。
激光测距仪5的功能主要为:测量布放回收装置与海面的距离及测量无人艇对接点与本装置的高度值。
聚光指示灯6的功能主要为:在本装置下放前在海平面上标示一个圆圈,控制装置把无人艇引导到该圆圈内为对接作准备。
对接锁紧及解锁感应头7安装在气缸伸缩杆前端的凹槽中,方便对接时控制器给出锁紧信号或者解锁信号。
电控部分组成:电控部分由控制箱与执行器及各种动力及信号连接线组成。其中控制箱内安装有智能控制器,HMI界面,操作面板等部件。
本装置的工作过程为:利用母船的吊机,先起吊智能布放回收装置,开启布放回收装置控制系统,吊机粗略移动到无人艇上方,智能布放回收装置寻迹,对接,锁紧无人艇吊点,吊机移动到无人艇布放位置,吊机下放无人艇到海面,解锁无人艇,无人艇执行任务。无人艇执行完任务,在智能布放回收装置灯光指示下,无人艇大致回到指示位置,母船吊机移动到回收位置,开启智能寻迹装置,智能布放回收装置对接,锁紧无人艇吊点,吊机移动无人艇到甲板指定位置。任务完成。
无人艇智能布放过程为:
如图5所示,无人艇智能布放回收装置布放阶段过程共分12步,图中吊具指定为智能布放回收装置。1、吊机开启,2、移到吊具上方,3、吊具固定吊钩,4、移动到无人艇上方,5、吊具检测无人艇吊点,6、吊具XY寻迹,7、吊具挂好无人艇,8、移无人艇到海面,9、吊具解锁,10、无人艇脱开吊具,11、吊具回收,12、结束。其中关键步为第6步,说明如下:当吊具放到无人艇预吊点上方位置时,吊具的激光测距仪测得无人艇离吊具的设定高度后,吊具的XY刻度摄像头开始成像,无人艇的吊点会不停在XY刻度的坐标系运动。控制器根据高度值及XY偏移量实时反馈控制矢量XY变频风机朝圆心运动,当XY偏移量小于设定的范围值时,吊具伸缩杆快速伸出,直接到无人艇预吊点孔中,无人艇吊具中心的传感器感应到伸缩杆到位信号后,立刻夹紧吊杆,至此,对接完成。吊具再按步执行后面进程。
无人艇智能回收过程为:
如图6所示,无人艇智能布放回收装置回收阶段共分12步,图中吊具指定为智能布放回收装置。1、吊机开启,2、移到吊具上方,3、吊具固定吊钩,4、移动到无人艇预吊点,5、吊具开指示灯,6、无人艇开到预定范围,7、吊具XY寻迹,8、吊具无人艇对接好,9、无人艇到甲板位置,10、吊具解锁,11、吊具归位, 12、结束。其中关键步为第7步,与布放过程类似。
一种无人艇智能布放回收装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0