





专利摘要
本发明提供用于介电弹性体装置(DED)自感测的电路、系统以及方法。所述电路包括:第一DED,所述第一DED耦合到或适合于耦合到第一电压源(例如用于提供致动信号或起动信号)上;电流传感器,所述电流传感器与所述第一DED串联设置;以及振荡信号源,所述振荡信号源耦合到所述第一DED上并且适合于造成跨越所述DED的电压中的振荡,其中所述振荡信号源从所述第一电压源去耦。
权利要求
1.一种自感测介电弹性体装置电路,其包括:
第一介电弹性体装置,所述第一介电弹性体装置耦合到第一电压源上;
电流传感器,所述电流传感器与所述第一介电弹性体装置串联设置;以及
振荡信号源,所述振荡信号源耦合到所述第一介电弹性体装置上并且适合于造成跨越所述介电弹性体装置的电压中的振荡,其中所述振荡信号源从所述第一电压源去耦。
2.根据权利要求1所述的电路,其中所述振荡信号源耦合到所述第一介电弹性体装置的低压电极上。
3.根据权利要求1所述的电路,其中所述振荡信号源耦合到与所述第一介电弹性体装置并联设置的电容器的低压电极上。
4.根据权利要求1所述的电路,其中所述介电弹性体装置包括介电弹性体发电机。
5.根据权利要求4所述的电路,其中所述第一电压源适合于选择性地向所述介电弹性体装置提供电流/从所述介电弹性体装置吸收电流,以对应地使所述介电弹性体装置起动以及放电。
6.根据权利要求1所述的电路,其中所述介电弹性体装置包括介电弹性体致动器,并且所述第一电压源适合于向所述介电弹性体致动器提供致动信号。
7.根据权利要求1所述的电路,其中所述第一电压源电连接到所述第一介电弹性体装置的第一端,而所述振荡信号源电连接到所述第一介电弹性体装置的第二端。
8.根据权利要求1所述的电路,其包括各自与所述第一介电弹性体装置并联设置的一或多个另外的介电弹性体装置,以及与所述一或多个另外的介电弹性体装置中的每一者串联设置的另一个电流传感器。
9.根据权利要求1所述的电路,其包括各自与所述第一介电弹性体装置串联设置的一或多个另外的介电弹性体装置。
10.一种自感测介电弹性体装置系统,其包括根据权利要求1到8中的任一项所述的自感测介电弹性体装置电路以及与所述自感测介电弹性体装置电路并联设置的电荷控制电路或第一电压源。
11.根据权利要求10所述的系统,其中所述介电弹性体装置包括介电弹性体发电机,并且所述系统进一步包括与所述自感测介电弹性体装置电路并联设置的电荷控制电路。
12.根据权利要求10所述的系统,其中所述介电弹性体装置包括介电弹性体致动器,并且所述系统进一步包括与所述自感测介电弹性体装置电路并联的所述第一电压源以选择性地致动所述介电弹性体致动器。
13.根据权利要求10所述的系统,其进一步包括计算装置,所述计算装置以通信方式耦合到所述或每一电流传感器上以计算关于所述介电弹性体装置的状态的至少一个反馈参数。
14.根据权利要求13所述的系统,其中所述计算装置适合于通过平面近似法来计算所述至少一个反馈参数。
15.一种介电弹性体装置自感测方法,其包括以下步骤:
向第一介电弹性体装置提供振荡电压,所述振荡电压从可耦合到所述介电弹性体装置上的第一电压源去耦;
接收与所述第一介电弹性体装置串联的电流的测量结果;以及
至少部分基于所述电流测量结果来计算关于所述第一介电弹性体装置的状态的至少一个反馈参数。
16.根据权利要求15所述的自感测方法,其中所述振荡电压是接地振荡电压信号。
17.根据权利要求15所述的自感测方法,其中所述振荡电压是独立于通过所述第一电压源供应的高压信号的低压信号。
18.根据权利要求15所述的自感测方法,其中所述向所述第一介电弹性体装置提供所述振荡电压的步骤包括以下各者中的至少一者:
向所述介电弹性体装置的低压电极提供所述振荡电压;以及
向与所述介电弹性体装置并联的电容器的低压电极提供所述振荡电压。
19.根据权利要求15所述的自感测方法,其中所述方法进一步包括接收跨越所述第一介电弹性体装置的电压的测量结果,并且至少部分基于所述电流测量结果以及所述电压测量结果两者来计算关于所述第一介电弹性体装置的所述状态的至少一个反馈参数。
20.根据权利要求15所述的自感测方法,其中所述计算所述至少一个反馈参数的步骤通过计算装置来执行,所述计算装置接收所述电流测量结果作为输入数据,并且通过处理所述测量结果来计算所述反馈参数。
21.根据权利要求20所述的自感测方法,其中所述反馈参数由通过所述计算装置产生的状态感测信号来表示。
22.据权利要求15所述的自感测方法,其中所述方法进一步包括接收与和所述第一介电弹性体装置并联设置的一或多个另外的介电弹性体装置串联的电流的测量结果,并且至少部分基于对应的电流测量结果来计算关于所述另外的介电弹性体装置中的每一者的所述状态的至少一个反馈参数。
23.根据权利要求15所述的自感测方法,其中所述方法进一步包括接收跨越与所述第一介电弹性体装置串联设置的一或多个另外的介电弹性体装置的电压的测量结果,并且至少部分基于所述电流测量结果以及所述另外的介电弹性体装置中的每一者的对应的电压测量结果来计算关于所述另外的介电弹性体装置中的每一者的所述状态的至少一个反馈参数。
24.根据权利要求15所述的自感测方法,其进一步包括记录相对于时间的所述电流测量结果的步骤。
25.根据权利要求15所述的自感测方法,其中所述方法进一步包括接收跨越所述介电弹性体装置的电压的测量结果,并且所述计算至少一个反馈参数的步骤包括以下步骤:
根据所述电流测量结果来计算供应到所述介电弹性体装置的相对于时间的电荷;以及
当所述电荷测量结果以及所述电压测量结果被定义为正交轴时,通过至少相对于时间的所述电荷测量结果以及所述电压测量结果根据最佳拟合平面的系数计算一或多个反馈参数。
26.一种用于控制介电弹性体装置的方法,其包括:
根据权利要求15到25中的任一项所述的自感测方法获得关于介电弹性体装置的状态的反馈;以及
至少部分基于所述反馈控制所述介电弹性体装置。
27.根据权利要求26所述的方法,其中所述介电弹性体装置包括介电弹性体发电机,并且所述方法进一步包括:
通过向所述介电弹性体发电机的高压电极供应电能在所述介电弹性体发电机的机械变形后起动所述介电弹性体发电机;以及
在松开所述介电弹性体发电机后从所述高压电极获取电能。
28.根据权利要求26所述的方法,其中所述介电弹性体装置包括介电弹性体致动器,并且所述方法进一步包括通过供应与在所述介电弹性体致动器的所需状态与由所述反馈指示的所述介电弹性体致动器的所感测状态之间的误差相关联的致动电压来致动所述介电弹性体致动器。
29.根据权利要求26所述的方法,其中所述反馈用以控制以下各项中的一或多者:
所述介电弹性体发电机的刚度,从而调节共振;以及
跨越所述介电弹性体装置的所述电压,从而限制泄漏电流。
30.一种感测介电弹性体装置的状态的方法,所述方法的特征在于以下步骤:
将所述介电弹性体装置的高压电极连接到第一电压源;
向所述介电弹性体装置的低压电极提供接地振荡信号,其中所述接地振荡信号源从所述第一电压源去耦;
感测与所述介电弹性体装置串联的电流;以及
产生取决于所述所感测电流的状态感测信号。
31.根据权利要求30所述的方法,其中所述感测信号可以用作关于所述介电装置的所述状态的反馈。
32.一种用于使用具有连接到第一电压源的高压电极以及连接到振荡信号源的低压电极的介电弹性体装置感测机械应变和/或运动的方法,其中所述振荡信号源从所述第一电压源去耦,所述方法包括以下步骤:
使在所述装置的所述低压电极处的电压振荡;
感测通过所述介电装置的串联电流;以及
产生取决于所述所感测电流的状态感测信号以感测所述应变和/或运动的所述状态。
说明书
技术领域
本发明涉及一种介电弹性体装置(DED)电路以及方法。更确切地说,但是非排他性地,本发明涉及一种能够自感测的介电弹性体发电机(DEG)电路以及方法。
背景技术
介电弹性体装置(DED),无论是致动器(介电弹性体致动器,或DEA)还是发电机(介电弹性体发电机,或DEG),都是可以用于将电能转换成机械能(反之亦然)的有用的换能器装置。DED具有关于传统的致动器/发电机的一些独特特性,例如是本身兼容的,这使得它们特别适合于某些应用。
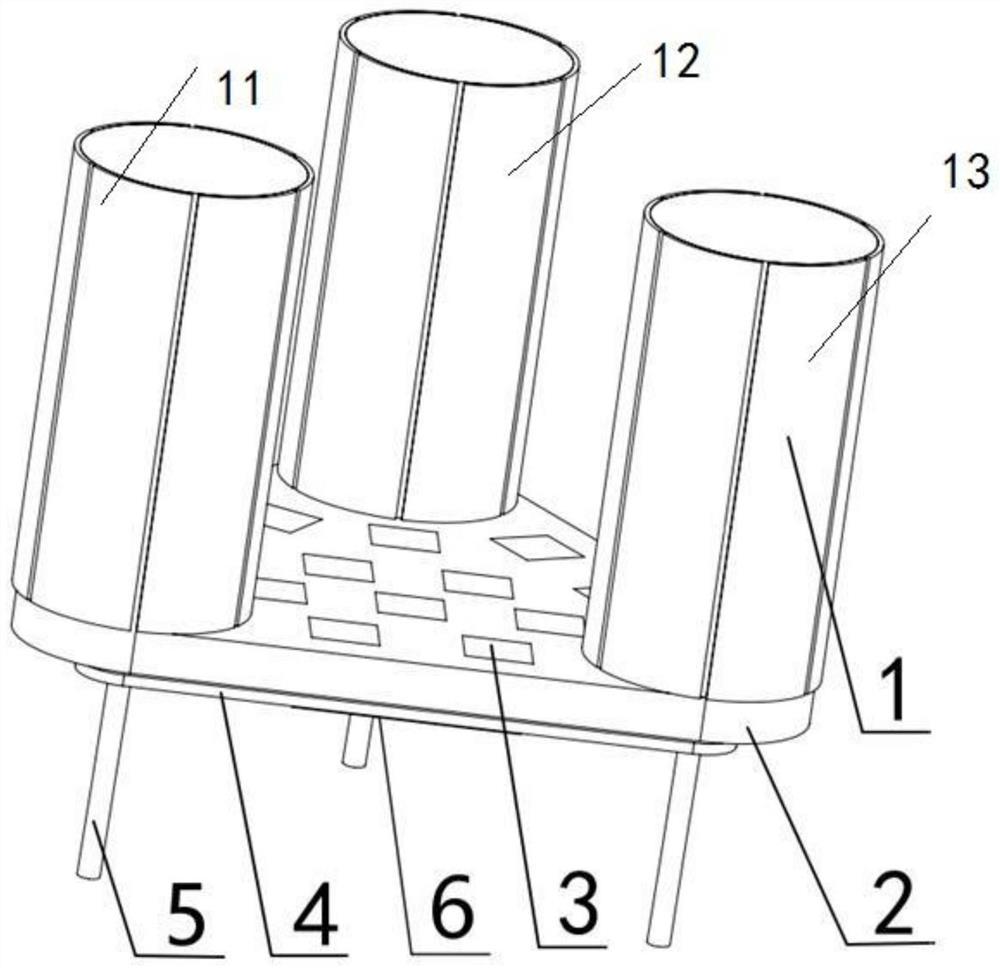
DED通常包括夹在相反的兼容电极12之间的介电弹性体膜11。当以电容器方式跨越电极12施加高压时通过静电压力压缩介电弹性体膜11,从而造成膜从未经压缩或经收缩状态到经压缩或经膨胀状态的平面膨胀。
现有技术的传统的换能器的情况是:在许多应用中具有关于所述装置状态的一些反馈是有利的或必要的。此反馈可以用于例如闭环控制,或者检测装置的操作是否接近其极限(即,以识别从而限制装置即将发生的故障的风险)。因此,现有技术的传统的换能器通常将装有一些外部传感器(例如,微动开关、应变计、光学传感器等)以直接测量或检测装置的运动。所需的外部传感器增加了致动器的组件数量和复杂性。
DED的一个优点是:关于DED的状态反馈可以优选地动态地(例如,当DEA经致动或DEG经机械变形时)仅从致动器/发电机换能器自身的可测量电气特性获得,此优点被称为自感测。确切地说,因为DED的膜是优选地在体积上不可压缩的,所以有可能使在DED的电极之间的电容的改变与DED的物理几何形状的改变相关。因此不需要外部传感器。因此自感测DED是多功能性的,通过监视其几何形状,DED可以用作应变传感器或压力传感器,同时充当致动器或发电机(即,自供电的传感器)。DED的电容的估算还可以用于提供关于DED的电气状态的另外有用的反馈数据,包含可以指示DED的健康的充电电流以及泄漏电流。外部传感器不直接提供关于DED的电气状态的任何反馈。
随着DED上的电荷增加,电场以及静电压力也增加。如果允许电场增长过大,那么DED将经受介电击穿。当发生这种情况时,DED上的电荷将通过膜11的厚度被快速放电,从而产生大量的热量并且常常导致DED的灾难性故障。监视泄漏电流还可以使得能够检测介电击穿的前兆以及DED的故障。
由于高效DED所必需的高压,实施电容性自感测不像应用在其它领域中通常应用的电容性感测技术一样简单。尽管如此,自感测方法先前已经被开发出并且用以在DEA系统中提供反馈。
例如,第WO 2009/01515号国际专利公开案揭示了一种自感测介电致动器系统,其中相对高频率感测信号通过信号混合器叠加在低频率致动信号上,并且致动器的变形根据感测信号的改变来估算。
第WO 2010/095960号以及第WO 2012/053906号国际专利公开案各自揭示了一种用于通过仅测量电极与供应到DEA的串联电流之间的电压差来动态地(即,在DED经致动时)估算DEA的相反电极之间的电容的方法以及系统。使用电容估算,还可以估算充电电流以及泄漏电流。
然而,此类系统以及方法存在几个潜在的缺点。
首先,由于DED系统中的典型高压,现有技术的方法需要相对较昂贵的高压电子组件来引入致动信号中的所需振荡,无论所述高压电子组件是浮动的振荡信号源还是信号混合器。所述振荡可以替代地通过致动信号源自身(例如,使用脉宽调制)来产生,但是这会使设计变得复杂。
其次,所述方法不能容易地应用以在DEG系统中实施自感测。例如,WO2010/095960的方法以及系统要求DEA的电压至少在自感测期间振荡。此振荡可以通过振荡高压电源提供,或者使用高压开关以快速使DE致动器充电/放电来提供。因此,自感测方法引起跨越DEA的小范围的电压振荡同时致动DEA。DEA对所引起的纹波的响应使得能够导出其应变状态以及电气状态。
然而,DEG发电机操作起来与DEA略为不同,并且用于控制DEG的控制电路/控制策略并不利于现有技术的DEA自感测系统以及方法。
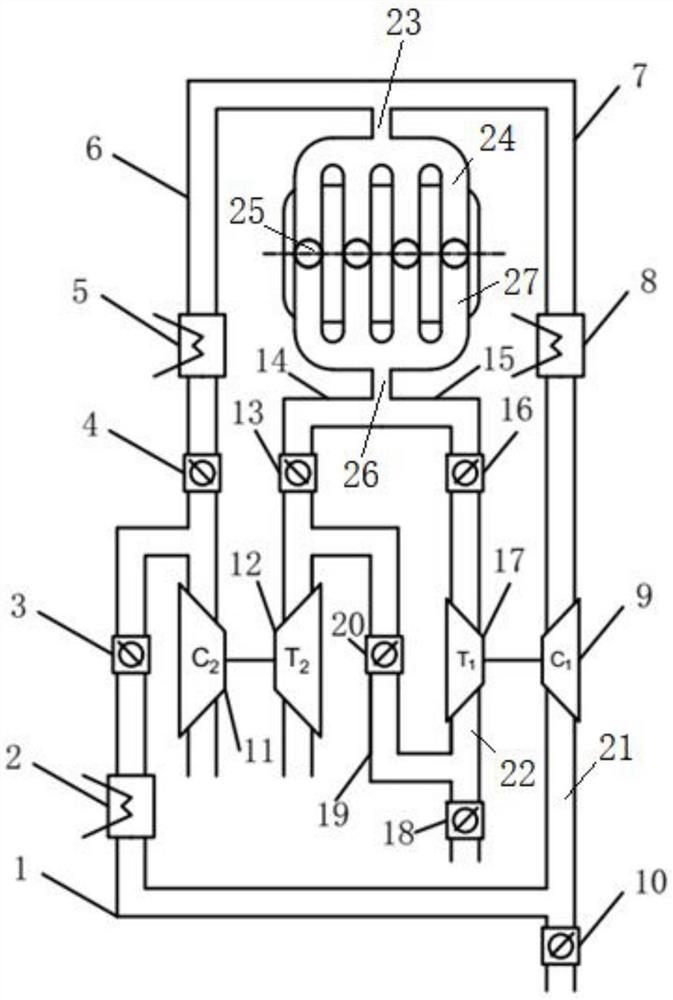
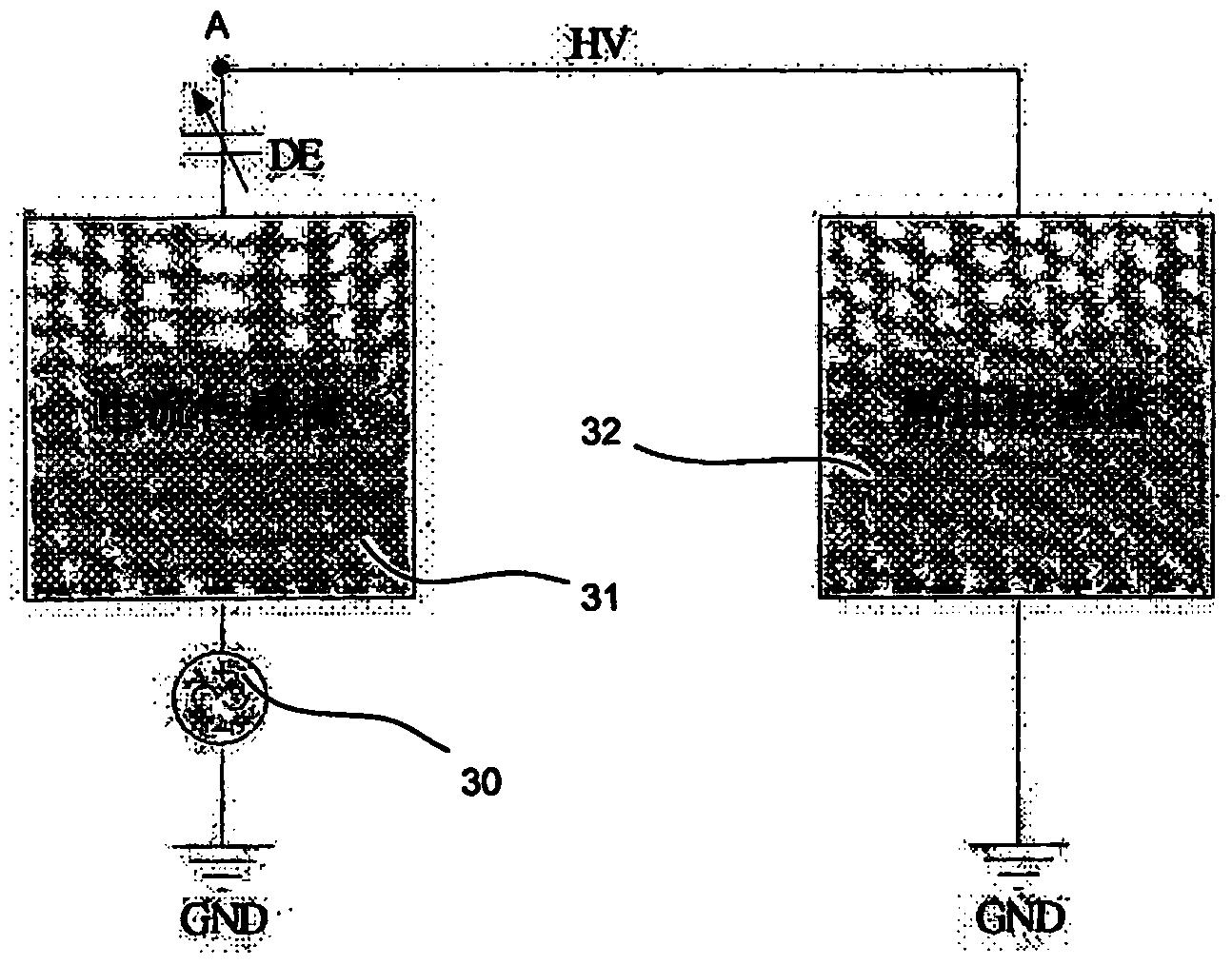
DEG通过增加储存于其中的电势能来产生电能。实现此的步骤在图1中以图解形式示出。从图1的顶端开始,首先通过拉伸DEG 11将机械能10施加至所述DEG。这引起电极12的平面膨胀以及膜13的正交压缩,从而导致增加的电容。随后通过从电源(未示出)充电或起动将电能14输入到DEG,使得相反的电极12变得带相反电荷。松开DEG将由于其平面收缩通过迫使相反电极12上的相反的电荷(+以及-)分开,并且迫使每一电极12上相同的电荷靠得更近而将机械能转换成电能。获取电能14并且重复所述周期。
为了提供起动电荷,DEG系统优选地包括例如由第WO 2011/005123号国际专利公开案所揭示的自起动电路。然而,自起动电路在高压电源与DEG之间不提供如WO 2010/095960的自感测DEA方法所需的恒定连接。
因此,本发明的目的是提供一种自感测DED系统和/或一种用于DED自感测的方法,所述系统和/或方法克服或至少改善现有技术的一或多个缺点,或替代地至少为公众提供有用的选择。
本发明的其它目的将从以下描述中变得显而易见。
发明内容
在第一方面中,本发明可以广义地说在于一种自感测介电弹性体装置(DED)电路,其包括:
第一DED,所述第一DED耦合到或适合于耦合到第一电压源上;
电流传感器,所述电流传感器与第一DED串联设置;以及
振荡信号源,所述振荡信号源耦合到第一DED上并且适合于造成跨越DED的电压中的振荡,其中所述振荡信号源从第一电压源去耦。
在振荡信号源与第一DED之间的耦合可以是或者直接或者间接的。
第一电压源可以例如适合于提供致动信号或起动信号并且可以进一步适合于选择性地从DED吸收电流。
优选地,振荡信号源是接地信号源。
优选地,振荡信号源耦合到第一DED的低压电极上。更确切地说,振荡信号源优选地与DED以及电流传感器串联设置,并且更优选地耦合在电流传感器与地面之间。在此实施例中,第一DED的高压电极耦合到或适合于耦合到第一电压源上。
替代地,振荡信号源可以耦合到与第一DED并联设置的电容器的低压电极上。更确切地说,振荡信号源优选地设置在电容器的低压电极与地面之间,振荡信号源以及电容器共同地与DED并联设置。
优选地,电流传感器耦合到DED的低压电极上。
优选地,振荡信号源产生正弦或方波振荡信号。然而,可以替代地使用任何其它合适的振荡信号波形。
优选地,DED包括介电弹性体发电机(DEG)。在这种情况下,第一电压源优选地适合于选择性地向DED提供电流/从DED吸收电流,以对应地使DED起动以及放电。
替代地,DED可以包括介电弹性体致动器(DEA)。在这种情况下,第一电压源适合于向DEA提供致动信号。致动信号一般来说将是比振荡信号高得多的电压。
优选地,电路进一步包括与第一DED并联设置的电压传感器。
优选地,电路包括各自与第一DED并联设置的一或多个另外的DED,以及与所述一或多个另外的DED中的每一者串联设置的另一个电流传感器。
替代地,电路可以包括各自与第一DED串联设置的一或多个另外的DED。优选地,另一个电压传感器耦合到一或多个另外的DED中的每一者的高压电极上。
优选地,所述或每一电流传感器包括设置在耦合到差分放大器上的一对端子之间的串联电阻器。
优选地,电压传感器包括分压器。
优选地,振荡信号源不具有直流偏移。
在第二方面中,本发明可以广义地说在于一种自感测DED系统,所述自感测DED系统包括根据本发明的第一方面的自感测DED电路。
优选地,DED包括DEG,并且所述系统进一步包括与自感测DED电路并联设置的电荷控制电路。确切地说,电荷控制电路优选地包括自起动电路。
替代地,DED可以包括DEA,并且所述系统进一步包括与自感测DED电路并联的第一电压源以选择性地致动DEA。
优选地,所述系统进一步包括以通信方式耦合到所述或每一电流传感器上的计算装置。所述计算装置优选地还以通信方式耦合到所述或每一电压传感器上。
优选地,计算装置适合于接收来自至少所述或每一电流传感器的测量结果,并且至少部分基于所接收的测量结果来计算关于DED的状态的至少一个反馈参数。优选地,反馈参数指示DED的面积、变形、电容、充电电流和/或泄漏电流中的一或多者。
优选地,计算装置适合于通过平面近似法、并且尤其是超平面近似法来计算至少一个反馈参数。
在第三方面中,本发明可以广义地说在于一种介电弹性体装置(DED)自感测方法,所述方法包括以下步骤:
向第一DED提供振荡电压,所述振荡电压从也耦合到DED上的第一电压源去耦;
接收与第一DED串联的电流的测量结果;以及
至少部分基于电流测量结果来计算关于第一DED的状态的至少一个反馈参数。
优选地,振荡电压是接地振荡电压信号。
优选地,振荡电压是独立于通过第一电压源供应的高压信号的低压信号。
优选地,向第一DED提供振荡电压的步骤包括以下各者中的至少一者:
向DED的低压电极提供振荡电压;以及
向与DED并联的电容器的低压电极提供振荡电压。
优选地,所述方法进一步包括接收跨越第一DED的电压的测量结果,并且至少部分基于电流测量结果以及电压测量结果两者来计算关于第一DED的状态的至少一个反馈参数。
优选地,计算至少一个反馈参数的步骤通过计算装置来执行,其中计算装置接收电流测量结果以及任选的电压测量结果作为输入数据,并且通过处理所述测量结果来计算所述反馈参数。反馈参数优选地由通过计算装置产生的状态感测信号来表示。
优选地,所述方法进一步包括接收与和第一DED并联设置的一或多个另外的DED串联的电流的测量结果,并且至少部分基于对应的电流测量结果来计算关于另外的DED中的每一者的状态的至少一个反馈参数。
替代地,所述方法可以包括接收跨越与第一DED串联设置的一或多个另外的DED的电压的测量结果,并且至少部分基于电流测量结果以及另外的DED中的每一者的对应的电压测量结果来计算关于另外的DED中的每一者的状态的至少一个反馈参数。
优选地,反馈参数指示DED的面积、变形、电容、充电电流和/或泄漏电流中的一或多者。
优选地,所述方法进一步包括记录相对于时间的电流测量结果和/或电压测量结果的步骤。
优选地,计算至少一个反馈参数的步骤包括以下步骤:
根据电流测量结果来计算供应到DED的相对于时间的电荷;以及
当电荷测量结果以及电压测量结果被定义为正交轴时,通过至少相对于时间的电荷测量结果以及电压测量结果根据最佳拟合平面的系数计算一或多个反馈参数。
优选地,计算一或多个反馈参数的步骤包括根据沿电压-电荷轴的斜率来计算DED的电容。
优选地,感测与DED串联的电流的步骤包括测量跨越与DED串联设置的电阻器的电压差。
优选地,感测DED的电压的步骤包括测量与DED并联设置的分压器中的电压。
在第四方面中,本发明可以广义地说在于一种用于控制DED的方法,所述方法包括:
根据本发明的第三方面的自感测方法获得关于DED的状态的反馈;以及
至少部分基于所述反馈控制DED。
优选地,DED包括DEG,其中所述方法进一步包括:
通过向DEG的高压电极供应电能在DEG的机械变形后起动DEG;以及
在松开DEG后从高压电极获取电能。
优选地,反馈用以控制DEG的刚度从而调节共振。
优选地,反馈用以控制跨越DED的电压从而限制泄漏电流。
替代地,DED可以包括DEA,其中所述方法进一步包括通过供应与在DEA的所需状态与由反馈指示的DEA的所感测状态之间的误差相关联的致动电压来致动DEA。
在第五方面中,本发明可以广义地说在于一种感测介电弹性体装置的状态的方法,所述方法的特征在于以下步骤:
向介电弹性体装置提供接地振荡信号;
感测与介电弹性体装置串联的电流;以及
产生取决于所感测电流的状态感测信号。
感测信号可以用作关于介电装置的状态的反馈。
在第六方面中,本发明可以广义地说在于使用具有高压电极以及低压电极的介电弹性体装置感测机械应变和/或运动,所述方法的特征在于以下步骤:
使在装置的低压电极处的电压振荡;
感测通过介电装置的串联电流;以及
产生取决于所感测电流的状态感测信号以感测应变和/或运动的状态。
在第七方面中,本发明可以广义地说在于一种介电弹性体装置电路,其包括:
介电弹性体装置,所述介电弹性体装置耦合到或可耦合到第一电压源上;以及
振荡信号源,所述振荡信号源耦合到介电弹性体装置上;
其中第一电压源以及介电弹性体装置通过隔直电容器耦合到彼此上。介电弹性体装置可以形成隔直电容器,或隔直电容器可以包括与介电弹性体装置并联设置的电容器。
在所有本发明的新颖方面中应考虑到的本发明的另外方面将从以下描述中变得显而易见。
附图说明
现将参考图式借助于实例描述本发明的多个实施例,在所述图式中:
图1是从介电弹性体发电机产生电力所需的四个步骤的图解说明;
图2是根据现有技术的自感测介电弹性体致动器电路的示意图;
图3是根据本发明的自感测介电弹性体装置电路的第一实施例的方块图;
图4是图3的电路的示意图;
图5是根据本发明的自感测介电弹性体装置的第二实施例的方块图;
图6是结合图5的电路的介电弹性体发电机系统的方块图;
图7是图6的系统的示意图;
图8示出图7的系统中的DED的经模拟以及经估算电容波形;
图9示出图7的系统中的DED的经模拟输出电压波形;
图10是根据本发明的自感测介电弹性体装置电路的第三实施例的方块图;
图11是根据本发明的自感测介电弹性体装置电路的第四实施例的方块图;以及
图12示出根据本发明的另一个实施例的电路中介电弹性体发电机的(a)电容;以及(b)电压的实例波形。
具体实施方式
在整个描述中相同的参考标号将用于指示不同实施例中的相同的特征。出于描述以及权利要求的目的,术语“低压”以及“高压”指示对应的信号的电压量值的相对差异,而不是任何特定的数值电压范围。确切地说,“高压”信号优选地具有是同一电路中的“低压”信号的数量级的至少几倍的数量级,并且更优选地具有更大的数量级。
WO 2010/095960、WO 2011/005123以及WO 2012/053906的内容通过参考并入本文中。
现有技术的自感测介电弹性体致动器(DEA)电路在图2中示出。通过询问跨越DE的电流以及电压振荡来实现自感测。所需的振荡通过或者使用如图所示的具有合适输出纹波(HV in)的电源,或者快速切换在高压电源与DE之间的连接(例如,使用脉宽调制,PWM)来方便地与高压致动或驱动信号HV结合。主要组件包含DE(DE1)、振荡高压电源(HV in)、DE串联电流传感器(Ri以及端子i_sense)以及高压传感器(分压器包括串联电阻器Vs1和Vs2以及端子V_sense)。
如上文简要地说明的,将自感测振荡与高压电源结合的现有技术DEA自感测电路存在两个主要缺点。
首先,所述现有技术DEA自感测电路不适合于许多介电弹性体发电机(DEG)电路,因为DEG系统一般在每一发电周期中具有相位,在所述发电周期期间DEG具有固定电荷(即,没有电流在DEG与起动电路之间流动)。这意味着起动电路不供应电流,并且不可获得用于自感测所需的通过DEG的振荡。
其次,现有技术DEA自感测电路要求能够处理可能超过1000V的电压的高压电子装置,以提供振荡。因为适合于DED的高压电子装置不会大量生产,所以它们通常很昂贵。
本发明提供用于DEG自感测的替代的电路/系统和/或方法,其不需要至高压电源的永久连接或将应用于DEG的高压电极的振荡信号。
在本发明的上下文中,术语“高压”以及“低压”仅在相对意义上使用。即,高压信号仅具有比低压信号更大的电压。所述术语不意图指代任何特定电压范围。应进一步理解,无论是高压源还是低压源均不必需连续供应到DED。确切地说,当DED包括DEG时,高压信号一般将仅在操作的起动阶段期间供应。在其它阶段,高压“源”可以实际上从DEG吸收电流以使用或储存由此产生的能量。类似地,振荡低压信号可以仅在需要感测时产生。
参考图3,示出了根据本发明的自感测电路的第一实施例的方块图。所述电路的更加详细的示意图在图4中提供。
如尤其由图3示出,所述电路优选地包括DED(由可变电容器DE表示)、振荡感测信号源30、电流传感器31以及电压传感器32。感测信号源30以及优选地电流传感器31均与DED的复位引脚或低压侧或电极串联设置。电压传感器32与DED、电流传感器31以及感测信号源30并联设置。在使用时,所述电路通常将耦合到在端子A处的高压源上。例如,就DEG来说,高压源优选地包括如由WO 2011/005123揭示的自起动电路,以在机械变形之后起动DED。
感测信号源优选地提供不具有直流偏移或偏置的低压振荡信号。信号优选地是正弦的,但是可以替代地是例如方波。振荡感测信号的频率优选地大体上高于高压信号的频率。
从所图示的图中将可见振荡信号源30基本上从高压源“去耦”或独立于高压源,或换句话说仅与高压源电容耦合,由此来自高压致动或起动源的直流信号通过DED或电容器阻断,如下文所描述。在此实施例中的振荡信号源耦合在地面与DED的低压电极之间,且因此被称为“接地”。相比而言,如在现有技术中在高压信号上叠加或调制振荡信号需要不接地的“浮动的”振荡信号源或信号混合器,并且相应地需要相对昂贵的高压电子装置。
参考图4,电流传感器优选地包括在端子i_sense1与i_sense2之间的串联电阻器Ri,所述电阻器Ri可以耦合到例如差分放大器上,以使用欧姆定律确定跨越电阻器Ri的电位差以及因此通过所述电阻器的电流。电压传感器优选地包括呈分压器布置的一对串联电阻器Vs1以及Vs2,所述分压器布置具有在所述电阻器之间的端子V_sense。感测信号源30优选地包括低于100V并且更优选地低于10V峰间值的低压振荡信号源。
在本发明的此第一实施例的特定实例中,在端子i_sense1与i_sense2之间的电压差用以确定通过58kΩ电流感测电阻器Ri的电流,并且电压传感器电阻器Vs1以及Vs2形成1000:1的300MΩ分压器以测量DED电压。感测信号源30优选地具有在100Hz下振荡的7.5V的振幅,并且高压信号HV是100V。
出于说明性目的,本实例电路通过用三个固定值测试电容器替换DED来依次进行测试。测试电容器中的每一者的电容用市售的RCL计进行测试,然后使用实例电路以及例如由WO 2012/053906揭示的超平面近似法等自感测方法进行估算。此测试结果连同作为根据本发明所估算的电容与所测得的电容之间的百分数差的误差在下方列于表1中。
表1
从这些测试结果可见,所述电路使得能够仅从电流以及电压的测量结果获得电容的相对精确的估算。所述电路以及方法因此可以经应用以获得来自具有永久高压连接的DEA的动态反馈,而无需如现有技术所需的用于引入振荡的脉宽调制致动信号或高压电子装置。
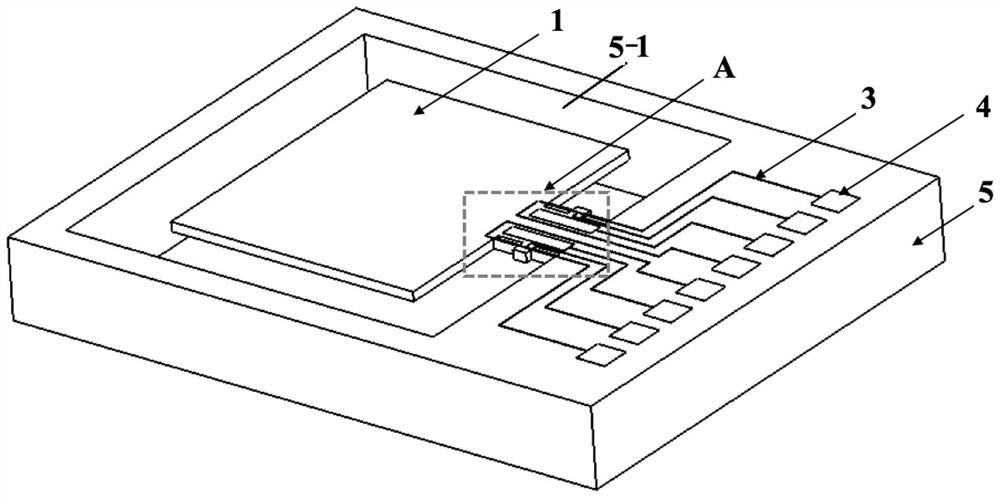
然而,如上所述,DEG不可能始终连接到高压电源上,因此当感测信号在图3和4的系统中振荡时,不存在(至少周期性地或间歇性地)HV供应以用于吸收以及提供电流。解决此问题的根据本发明的自感测电路50的第二实施例的方块图在图5中示出。
根据此第二实施例,多个DED与至少一个振荡感测信号源30并联设置,所述振荡感测信号源30与多个DED中的一者的复位引脚或低压电极串联设置。DED因此有效地形成在高压信号源与振荡感测信号源30之间的隔直电容器。
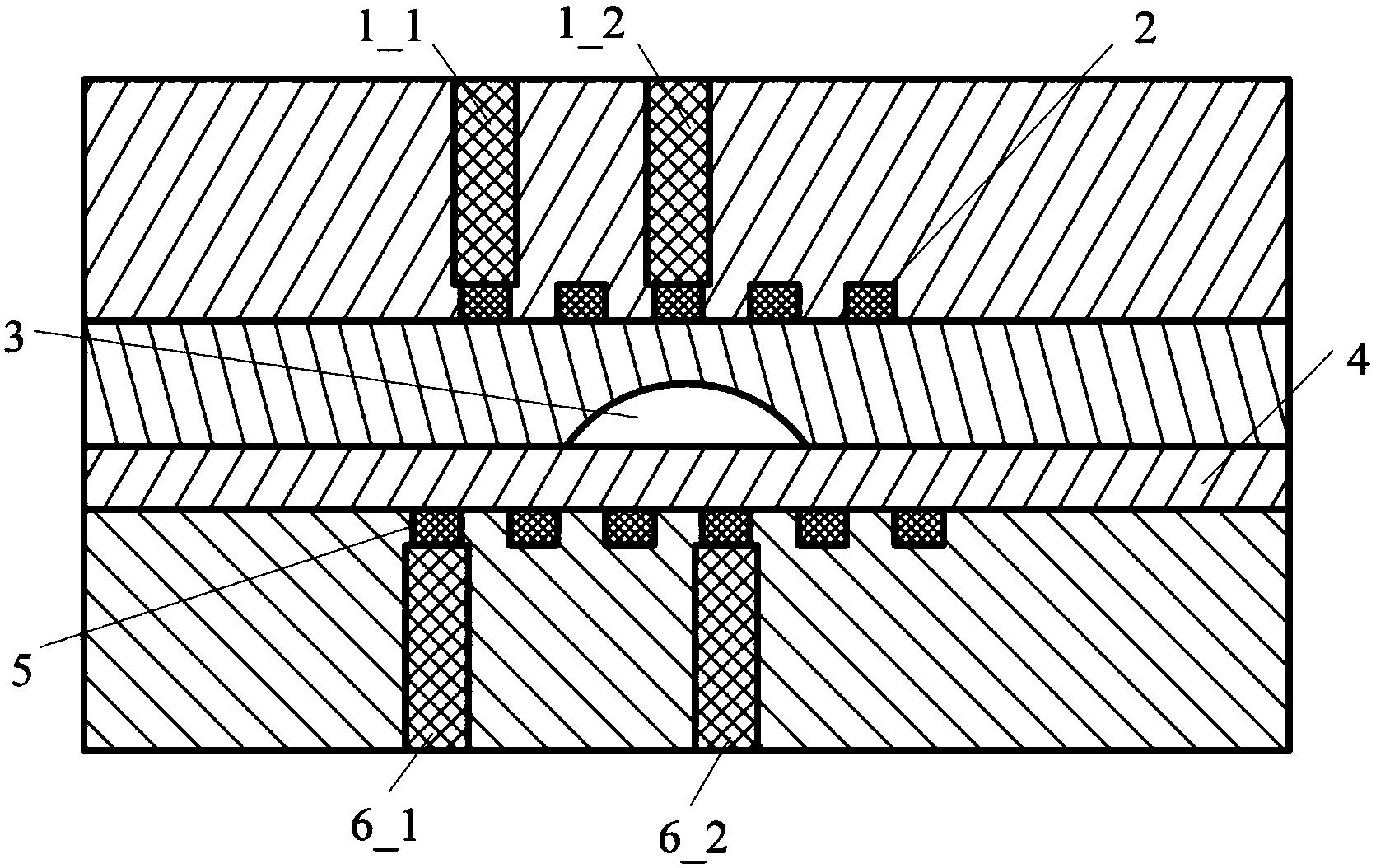
可以使用单个介电隔膜通过在所述膜的相反侧上形成多对电极来形成多个DED,由此将单个DED膜分段成多个有源区或区域,或可以替代地由不同的DED膜构成多个DED。虽然DED不需要彼此同相地变形,但是一般优选的是彼此同相地变形,因为不同相发电机将减小总电容范围。DED中的每一者的电容(特别是在静态平衡下)优选地实质上相同,使得对于每一DED的电流感测电路要求是相同的,但是在替代实施例中在不脱离本发明的范围的情况下电容可以不同。
在本发明的第二实施例的所图示实例中,所述电路包括由可变电容器DE1到DE3表示的三个DED。每一DED配备有其自身的串联电流传感器31,并且所述电路进一步包括与DED并联的单个电压传感器32。低压感测信号源30的振荡致使多个DED交替地彼此提供以及吸收电流。自感测方法因此不再需要高压电源来吸收/提供电流。
将多个DED并联连接的另外的好处是可以使用单个感测信号以及电压传感器来感测多个DED。每一DE需要其自身的电流传感器,但是此系统确实减小了多区感测的复杂性。
换句话说,可以仅使用一个不需要高压电子装置的振荡感测信号来产生多通道传感器。合适的紧凑的、低成本的组件都是可容易获得的的。
因为本发明提供用于供应自感测所需的电流以及电压振荡而不必永久地连接到高压电源上的电路以及方法,所以其使得能够实施自感测发电机。如图6和7中所示,通过将图5的分段式的自感测DED电路50与电荷控制电路60并联连接而产生自感测DEG。电荷控制电路60优选地包含功率调节以及起动电子装置两者,最优选地包含由WO 2011/005123揭示的自起动电路(SPC),例如在图7中详细示出的两阶段SPC 70。电荷控制电路60自由地使DEG充电/放电,并且并联DEG分段可以在电荷控制电路不吸收/提供电荷的时段期间吸收/提供电荷。
为了进一步图示本发明的此第二实施例的操作,在图8和9中提供图7的电路的经模拟波形。出于模拟的目的,串联电流传感器各自包括60kΩ的电阻器,其中在10kHz的取样速率下测量跨越在电流感测电阻器(感测电阻器1到感测电阻器3)之间的每一电阻器的电压差。感测信号源30包括在400Hz的频率下在±5V之间振荡的正弦信号。DED自身通过具有在大致2Hz的频率下的正弦波形的可变电容进行模拟,这表示DEG的周期性机械振荡。
使用由WO 2012/053906揭示的超平面近似法估算DED的电容,包括以下步骤:使用电流传感器31以及电压传感器32监视或重复测量并且记录电压以及电流;计算从所测得的电流供应到DED的电荷;并且通过从测量结果导出的数据根据最佳拟合平面的系数(即,最佳拟合平面沿相关轴的斜率)计算一或多个反馈参数。确切地说,优选地,通过表示在一定时间段上跨越DE的电位差、通过DE的串联电流以及供应到DE上的电荷中的每一者的正交轴定义超平面空间。反馈参数优选地包括DED的电容、泄漏电流以及电极电阻中的一或多者,尤其受关注的是电容,因为电容指示DED的面积或变形。确切地说,通过平面方程的第一系数来近似计算DED的电容,所述第一系数为平面方程的电压变量的系数(即,最佳拟合平面沿电压-电荷轴的斜率)。
应了解,尽管此超平面近似法可以在至少本实例中是优选的,但是在不脱离本发明的范围的情况下,可以替代地利用例如由WO 2010/095960揭示的动态自感测方法等任何其它方法,所述其它方法用于根据通过电流传感器31以及任选的电压传感器32所获得的数据来计算或估算此类信息。
上述方法将通常通过某种计算装置(未示出)来执行,所述计算装置例如微控制器,其以通信方式与电流传感器31以及电压传感器32耦合,以接收所感测的电流以及电压作为输入数据,并且通过根据合适的算法处理输入数据来导出关于DED的状态的反馈。为此所需的编程技术是计算机系统领域的技术人员所熟知的。计算装置因此优选地产生指示DED的状态的状态感测信号,所述信号可以作为反馈输出到DED控制器或内部使用。
图8示出DED的经模拟的正弦变化电容以及使用图7的电路估算的电容以及使用上述超平面近似法估算的电容。重叠的波形清楚地指示经模拟电容值与经估算电容值之间的完全一致。使用200Hz正弦波以及400Hz的5V方波感测信号也能获得良好的结果,这表示能灵活地选择振荡感应信号源30以遵循DEG操作条件或电路要求。使用至少一种替代的自感测方法也能获得类似的结果。
图9示出在同一模拟期间DEG的输出电压,表示DEG同时产生电力(从在电容振荡时DEG电压的周期振荡以及DEG电压的普遍向上趋势明显看出)。
A根据本发明的自感测介电弹性体装置电路的第三实施例在图10的方块图中示出。此电路解决了图5的第一实施例的电路的一个挑战,在第一实施例的电路中电流传感器1不接地,因为其浮动在振荡感测信号之上。图10的电路通过将振荡感测信号应用于小的固定的电容器Cs(优选地,数量级小于DED DE1到DE3的电容)的复位引脚而解决了此问题,由此电容器形成隔直电容器,使得供应感测信号的电路不暴露在高电压下,并且所有的电流传感器均接地。因此在本发明的此实施例中振荡信号源也从高压信号源去耦。
在根据本发明的自感测介电弹性体装置电路的又一实施例中,介电弹性体装置可以串联连接,如图11中所示。通过将介电弹性体装置(在此实例中,DE1到DE3)串联连接,仅需要一个电流传感器,但是需要多个电压传感器。仅具有一个电流传感器是有利的,因为自感测方法通常需要通过电流的整合来计算DED上的电荷的量,此整合将仅对于一个通道需要。串联布置的不利的一面是需要多个电压传感器;这些传感器将使电荷(且因此能量)从DED流失。因此,并联配置或串联配置的选择将依应用而定。
图12(a)和12(b)示出由测试本发明的另一实施例产生的结果。在此实施例中的电路与图10中示出的电路类似,但是具有两个并联DEG以及连接到如WO2011/005123中揭示的自起动电路上的高压源。DEG在大致2Hz的频率下手动地人工泵送。图12(a)的电容曲线示出一个DEG的所测得的电容以及如通过简单模型所预测的最大值以及最小值(通过虚线指示)。图12(b)中示出的所同时测得的电压指示电压周期性地缓慢增大,表示电路正积聚能量且因此产生电力。
在本发明的其它实施例中,可以省略电压传感器。确切地说,如果电力系统建模良好,那么可以在不感测电压的情况下估算DED的电容。例如,DED以及电流感测电阻器可以看作是滤波器,并且从其相位及幅度响应来估算电容。
在另一实施例中,本发明提供具有低压振荡信号源的DED电路。
在又一实施例中,本发明提供具有独立于高压信号使跨越DED的电压振荡的振荡信号源的DED电路。
在另一实施例中,本发明提供包括接地振荡信号源的DED电路。
本申请案具有许多可能的应用。确切地说,可以通过将本发明的电路和方法与DEG和合适的自感测方法组合来设置自供电的传感器。即,DEG在经机械变形时自身产生电力,而本发明的电路引入自感测方法所必需的振荡以估算DEG的电容以及因此其面积或变形。通过DEG产生的电力可以足以为用于完全自给传感器的振荡以及自感测电路完全供电,或可以为电池补充电或再充电。
此类自供电的传感器的可能应用可以包含(例如)整合软DEG传感器以监视关节运动的运动服装,或在电池更换或大型阵列布线可能不切实际时用于结构健康监视的自供电传感器阵列。
除了例如自供电的传感器等应用以外,监视DEG的电气状态以及机械状态两者的能力提供可能用以开发闭环控制策略的反馈,从而使得能够增强DEG性能。确切地说,使用本发明获得的反馈通过例如泄漏电流等指示提供DEG接近故障的程度的指示或测量损耗。此信息可用以产生增强型控制策略。举例来说,能量产生以及DEG可靠性可以通过控制DEG的电荷状态得到最大化,使得DEG在其破坏包络线范围内操作或将通过泄漏电流的损耗降至最小,或DEG的刚度可以得到控制,使得其在机械刺激频率下共振。目前这样的反馈可能仅通过不能很好地阻抗匹配到DEG的、昂贵和/或低效的外部传感器来提供。
所述电路配置也适合于一次监视多个DEG,从而实现有成本效益的多自由度传感器,使得可以确定拉伸领域。这可以例如用以确定在鞋子的鞋垫上的应力分布。
所述电路还可以与介电弹性体致动器一起使用。由于所述电路不需要现有技术的高压电子装置,因此其提供了用于自感测DEA的相对便宜的替代方案。替代地,所述电路可以与专用介电弹性体传感器(即,皆不致动也不发电)一起使用。
从前述内容将可见提供了在不需要高压振荡的情况下实施自感测介电弹性体装置的电路和/或方法。确切地说,这使得能够在通常不具有介电弹性体致动器的永久高压连接的介电弹性体发电机中实施自感测。本发明具有可以将用于自感测所需的DED电压振荡与仅低压电子装置一起引入的另外的或替代的优点。本发明可以应用于介电弹性体致动器系统,并且具有简化致动信号源的设计的优点,使得不再需要提供用于自感测所需的振荡。
将显而易见本发明的DED自感测电路可以包括单个DED或多个DED。在权利要求书中的描述中对“第一DED”的任何提及不应作为电路必需包括多个DED的暗示。“第一DED”可以在至少一些实施例中是电路或系统中的唯一DED。
除非上下文另有明确要求,否则在通篇描述中,“包括”等词应以与独占的或详尽的意义相反的包含性的意义来进行解释,即作为“包含,但不限于”来进行解释。
尽管已经借助于实例并且参考其可能实施例描述了本发明,但是应理解在不脱离本发明的范围的情况下可以进行实例的修改或改进。本发明还可以广义地说在于个别地或共同地在本申请案的说明书中提及或指示的部件、元件以及特征,在于所述部件、元件或特征中的两者或两者以上的任何或所有组合。此外,当已经参考具有已知等效物的本发明的特定组件或完整物时,那么此类等效物如同个别地阐述一样并入本文中。
在说明书的通篇中的现有技术的任何论述不应被视作承认此类现有技术是广泛的已知的或构成所述领域中的公共常识的一部分。
自感测介电弹性体装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0