










专利摘要
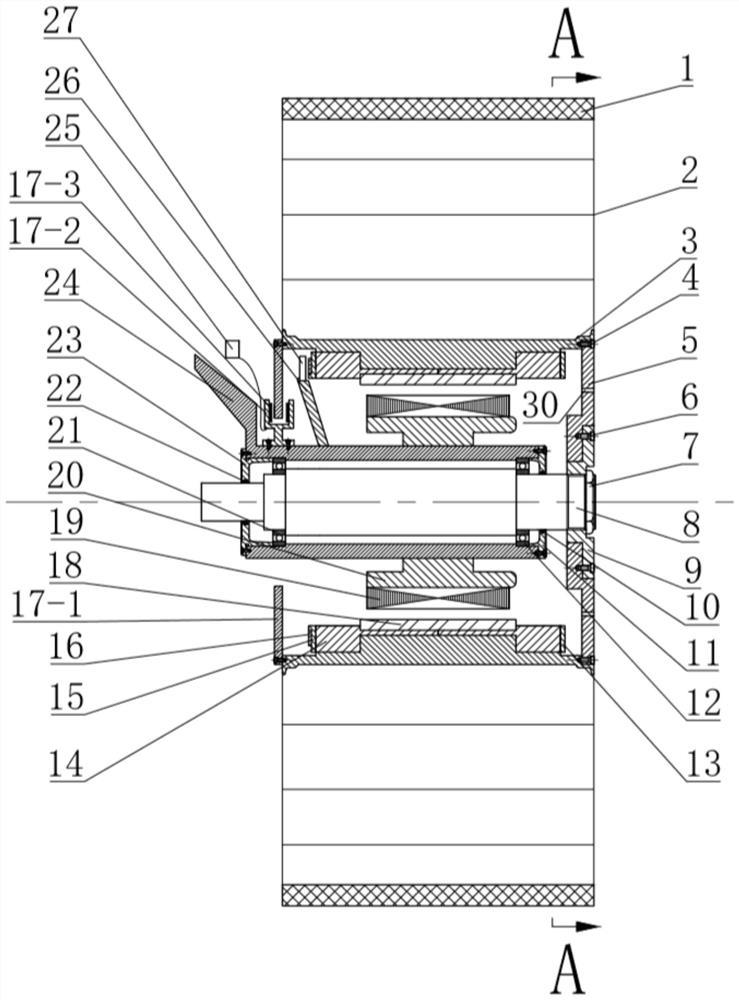
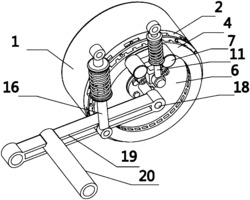
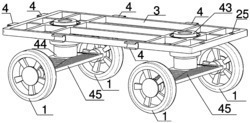
本实用新型涉及一种7DOF两轮多姿态机器人,包括车体、左车轮、右车轮、一对车轮动力机构、一对车轮转向机构;一对车轮动力机构及一对车轮转向机构分别对称安装在车体左右两侧,一对所述车轮动力机构可分别与左车轮、右车轮固定连接并驱动其移动,所述车轮转向机构分别控制左车轮、右车轮的转向,使得左车轮、右车轮既可实现同轴的平衡车式运动,也可实现两轮平面平行的自行车式运动;具有7个自由度的运动,集实验、教学、科研等功能为一体,能完成特定场合下的运输、救援、代步、娱乐等功能;同时,本实用新型可以作为智能控制、人工智能、机器人等学科的典型教学、科研实验平台和研究载体,可以用以检验各种智能算法的有效性。
权利要求
1.一种7DOF两轮多姿态机器人,其特征在于:包括车体、左车轮、右车轮、一对车轮动力机构、一对车轮转向机构;一对车轮动力机构及一对车轮转向机构分别对称安装在车体左右两侧,一对所述车轮动力机构可分别与左车轮、右车轮固定连接并驱动其移动,所述车轮转向机构分别控制左车轮、右车轮的转向,使得左车轮、右车轮既可实现同轴的平衡车式运动,也可实现两轮平面平行的自行车式运动;
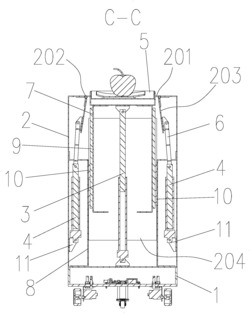
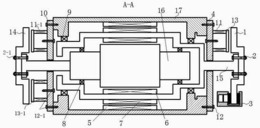
所述车轮动力机构包括轮毂电机、轮毂电机支座机构、轮毂电机固联立轴、中空轴导电滑环、轮毂电机转向同步带轮;所述轮毂电机安装在车轮内,所述轮毂电机支座机构一端与轮毂电机的输出轴固定连接,另一端固定连接所述轮毂电机固联立轴的一端,所述轮毂电机固联立轴另一端固定安装所述轮毂电机转向同步带轮,所述中空轴导电滑环固定在轮毂电机固联立轴上,所述轮毂电机固联立轴通过轴承固定在所述车体上。
2.根据权利要求1所述的一种7DOF两轮多姿态机器人,其特征在于:所述车轮转向机构包括转向电机、连轴器、转向传动轴、转向输出带轮;所述转向电机固定在车体上,并通过联轴器与转向传动轴连接,所述转向传动轴通过轴承安装在车体上,所述转向输出带轮安装在转向传动轴上,并通过同步带与轮毂电机转向同步带轮连接,实现车轮的转向。
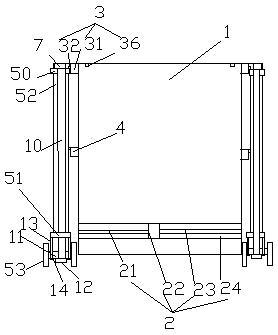
3.根据权利要求2所述的一种7DOF两轮多姿态机器人,其特征在于:所述车体包括壳体和骨架;所述骨架包括一对“几”字型侧板、电机安装板、转向传动轴安装板,一对所述侧板平行设置,且一对所述侧板之间的两侧对称固定安装所述电机安装板、转向传动轴安装板,所述转向电机固定安装在所述电机安装板上,所述转向传动轴穿过所述转向传动轴安装板并与其通过轴承固定连接。
4.根据权利要求3所述的一种7DOF两轮多姿态机器人,其特征在于:所述壳体包括外罩、车体底板、控制箱顶板、控制箱侧板,控制箱顶板、车体底板固定在“几”字型侧板上,控制箱侧板分别与车体底板、控制箱顶板固定连接共同形成控制箱,所述外罩能将所述控制箱及骨架罩在其内。
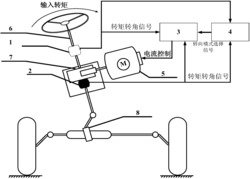
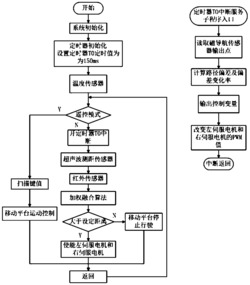
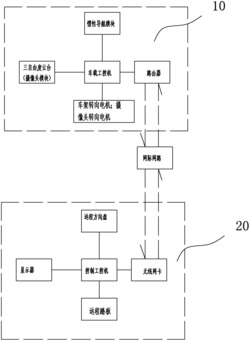
5.根据权利要求2所述的一种7DOF两轮多姿态机器人,其特征在于:还包括电气控制系统与姿态检测系统,所述电气控制系统与姿态检测系统包括轮毂电机驱动器、转向电机驱动器、工控机、陀螺仪、can通讯模块以及内置于轮毂电机及转向电机的光电编码器;陀螺仪安装在车体上,用以检测机器人的运行姿态,所述光电编码器可以检测机器人运行的位置、转动方向角度;所述轮毂电机驱动器、转向电机驱动器、光电编码器、陀螺仪均与所述工控机电路连接,所述工控机通过can通讯模块与上位机通讯连接。
一种7DOF两轮多姿态机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0