








专利摘要
本实用新型提供一种机器人驱动底盘,该机器人驱动底盘,包括底座、方向控制机构和驱动机构,所述方向控制机构和驱动机构分别设置在底座的前端和后端。还包括设有三个开口的多接头块、滚轮和用于固定多接头块位置的限位杆。所述多接头块的数量为四个,四个多接头块两两对称设置在底座的两侧。该机器人驱动底盘,通过通过设置的底座、方向控制机构、驱动机构、多接头块、滚轮和限位杆的相互配合,使得本实用新型可以在不需要通过千斤顶的支撑或者将机器人反转后对轮子进行更换和维修。大大提高了本实用新型的更换轮子的速度。方便人员的维修、维护工作。同时也减小在维修或者维护轮子的工作中,出现因挤压而使得外部传感器损坏的可能。
权利要求
1.一种机器人驱动底盘,包括底座(1)、方向控制机构(15)和驱动机构(2),所述方向控制机构(15)和驱动机构(2)分别设置在底座(1)的前端和后端,其特征在于:还包括设有三个开口(9)的多接头块(13)、滚轮(10)和用于固定多接头块(13)位置的限位杆(16),所述多接头块(13)的数量为四个,四个多接头块(13)两两对称枢接在底座(1)的两侧,所述滚轮(10)可任意插接在开口(9)中,所述方向控制机构(15)和驱动机构(2)分别控制位于底座(1)前端的多接头块(13)和位于底座(1)后端的滚轮(10),所述限位杆(16)贯穿多接头块(13)并将两个对称的多接头块(13)固定住。
2.根据权利要求1所述的一种机器人驱动底盘,其特征在于:还包括安装座(14),所述多接头块(13)和方向控制机构(15)、驱动机构(2)之间通过安装座(14)相连。
3.根据权利要求1所述的一种机器人驱动底盘,其特征在于:所述驱动机构(2)包括滚动杆(7)、从动轮(6)、皮带(5)、主动轮(4)和电机(3),所述电机(3)设置在底座(1)的底部,所述主动轮(4)设置在电机(3)的输出端,所述滚动杆(7)通过连接座(17)与底座(1)相连,所述滚动杆(7)与连接座(17)枢接,所述从动轮(6)套接在滚动杆(7)上,所述从动轮(6)与电机(3)通过皮带(5)联动连接。
4.根据权利要求3所述的一种机器人驱动底盘,其特征在于:还包括固定螺栓(8),所述滚轮(10)通过固定螺栓(8)与滚动杆(7)固定连接。
5.根据权利要求1所述的一种机器人驱动底盘,其特征在于:还包括联动杆(11),所述联动杆(11)的一端与多接头块(13)上的限位杆(16)套接,另一端与滚轮(10)枢接,所述联动杆(11)可通过三个开口(9)中的任意一个开口(9)与限位杆(16)套接。
6.根据权利要求1所述的一种机器人驱动底盘,其特征在于:还包括限位块(12),所述限位块(12)套在联动杆(11)上且与开口(9)的大小相适配。
说明书
技术领域
本实用新型涉及机器人技术领域,具体为一种机器人驱动底盘。
背景技术
目前,无人驾驶的移动机器人被越来越多地应用在露天或大型展馆场地自动巡检等领域。这些移动机器人的驱动底盘一般是由底盘本体和行走轮所组成。通过驱动行走轮实现对机器人的移动。
如中国专利公开了“用于机器人的转向驱动轮、机器人运动底盘及一种机器人”(专利号:CN201610395889.7),该专利的转向驱动轮是由两个电机驱动(转向电机及驱动电机),转向电机与驱动电机分开。上述专利可以适应木地板,瓷砖,地毯,等其他的各种室内地形;同时,由于转向驱动轮中包含对称设置的第一转轮及第二转轮,因此其负载能力也得到大幅的提高。
然而,上述专利一旦其用于行走、承重的轮子受到损伤,导致其轮子无法正常使用时,不得不使用千斤顶将其撑起进行拆卸,或者将该机器人反转,以方便人员的更换和维修。但这两种方式一个必须使用千斤顶,加大了人员的携带配重,另一个很容易在反转时,使得设置在机器人顶部的传感器受到损伤。
实用新型内容
(一)解决的技术问题
针对现有技术的不足,本实用新型提供了一种机器人驱动底盘,解决了上述专利在反转时,容易使得设置在机器人顶部的传感器受到损伤问题。
(二)技术方案
为实现以上目的,本实用新型通过以下技术方案予以实现:一种机器人驱动底盘,包括底座、方向控制机构和驱动机构,所述方向控制机构和驱动机构分别设置在底座的前端和后端。还包括设有三个开口的多接头块、滚轮和用于固定多接头块位置的限位杆。所述多接头块的数量为四个,四个多接头块两两对称设置在底座的两侧。所述滚轮可任意插接在开口中。所述方向控制机构和驱动机构分别控制位于底座前端的多接头块和位于底座后端的滚轮。所述限位杆贯穿多接头块并将两个对称的多接头块固定住。
优选的,还包括安装座。所述多接头块和方向控制机构、驱动机构之间通过安装座相连。
优选的,所述驱动机构包括滚动杆、从动轮、皮带、主动轮和电机。所述电机设置在底座的底部,所述主动轮设置在电机的输出端。所述滚动杆通过连接座与底座相连。所述滚动杆与连接座枢接,所述从动轮套接在滚动杆上。所述从动轮与电机通过皮带联动连接。
优选的,还包括固定螺栓,所述滚轮通过固定螺栓与滚动杆固定连接。
优选的,还包括联动杆,所述联动杆的一端与多接头块上的限位杆套接,另一端与滚轮枢接。所述联动杆可通过三个开口中的任意一个开口与限位杆套接。
优选的,还包括限位块,所述限位块套在联动杆上且与开口的大小相适配。
(三)有益效果
本实用新型提供了一种机器人驱动底盘。具备以下有益效果:
1、该机器人驱动底盘,通过通过设置的底座、方向控制机构、驱动机构、多接头块、滚轮和限位杆的相互配合,使得本实用新型可以在不需要通过千斤顶的支撑或者将机器人反转后对轮子进行更换和维修。大大提高了本实用新型的更换轮子的速度。方便人员的维修、维护工作。同时也减小在维修或者维护轮子的工作中,出现因挤压而使得外部传感器损坏的可能。
附图说明
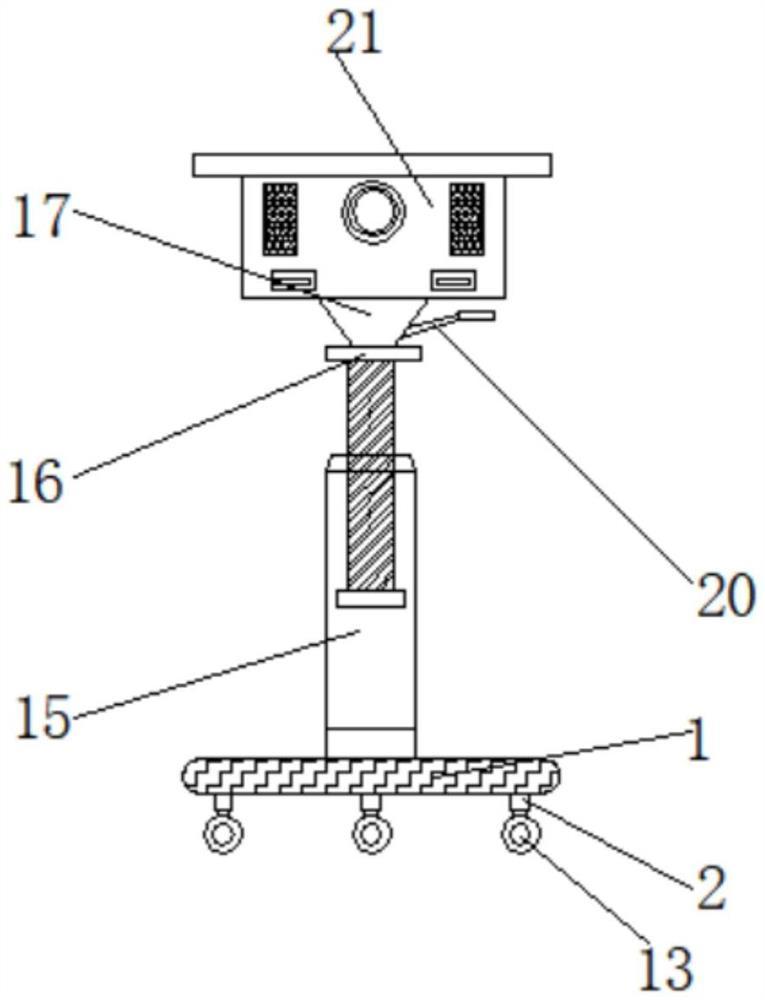
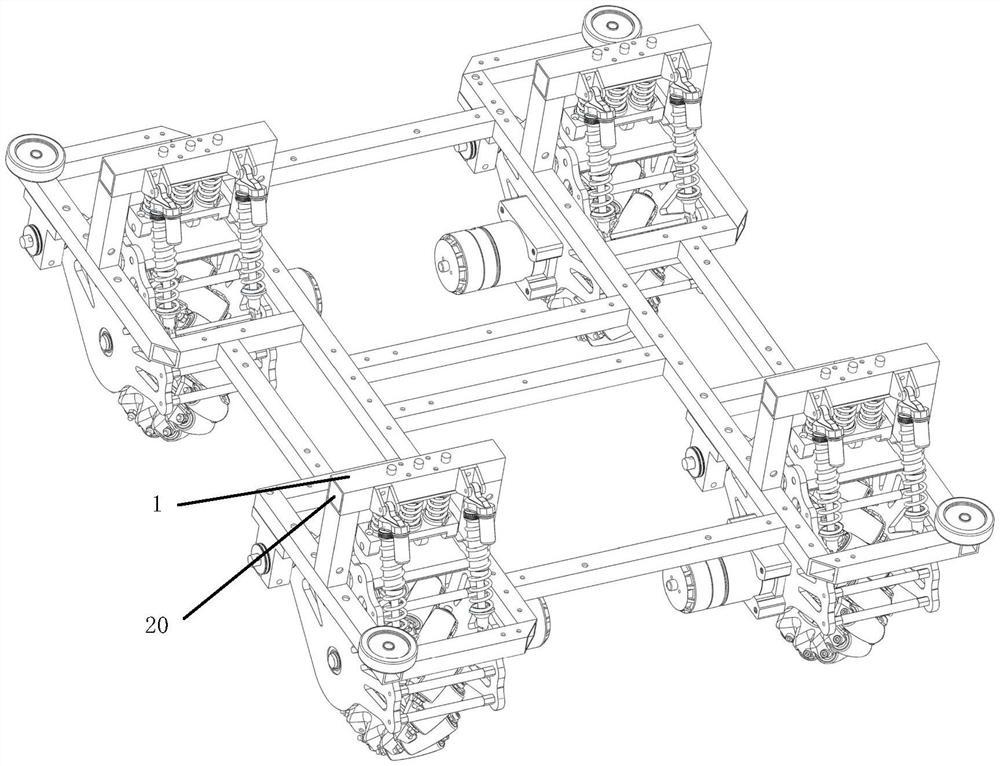
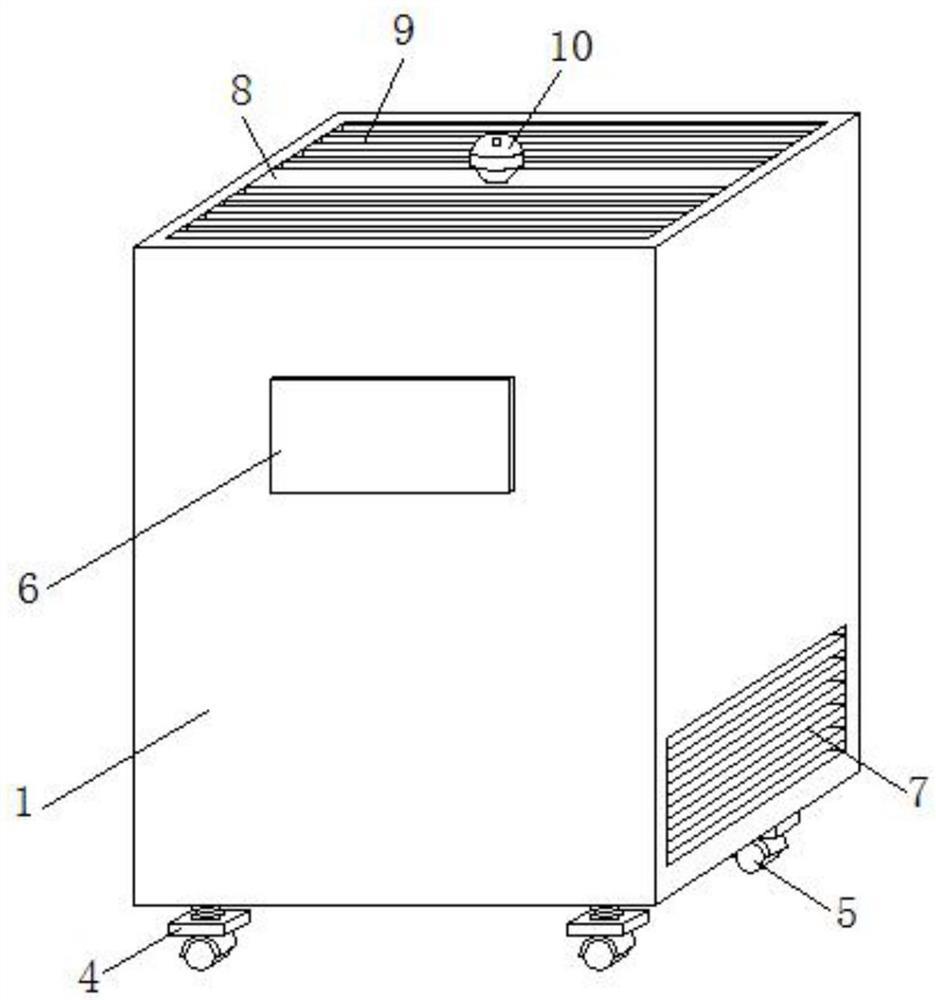
图1为本实用新型第一立体图;
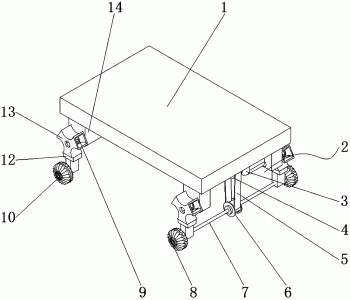
图2为本实用新型第二立体图;
图3为本实用新型正面剖视图;
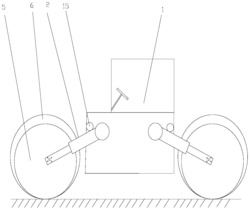
图4为本实用新型正视图;
图5为本实用新型局部部件示意图。
图中:1底座、2驱动机构、3电机、4主动轮、5皮带、6从动轮、7滚动杆、8固定螺栓、9开口、10滚轮、11联动杆、12限位块、13多接头块、 14安装座、15方向控制机构、16限位杆、17连接座。
具体实施方式
本实用新型实施例提供一种机器人驱动底盘,如图1-5所示,包括底座1、方向控制机构15和驱动机构2,方向控制机构15和驱动机构2分别设置在底座1的前端和后端。还包括设有三个开口9的多接头块13、滚轮10和用于固定多接头块13位置的限位杆16。多接头块13的数量为四个,四个多接头块 13两两对称设置在底座1的两侧。滚轮10可任意插接在开口9中。方向控制机构15和驱动机构2分别控制位于底座1前端的多接头块13和位于底座1 后端的滚轮10。限位杆16贯穿多接头块13并将两个对称的多接头块13固定住。
限位杆16的表面设置有齿纹,并与多接头块13的连接处的齿纹相啮合。使得多接头块13的位置固定住,防止在机器人行进时,多接头块13转动导致机器人摔倒的情况发生。
还包括安装座14。多接头块13和方向控制机构15、驱动机构2之间通过安装座14相连。
方向控制机构15为现有技术,固在本实用新型不做详细阐述。
位于底座1前端的安装座14与方向控制机构15相连。方向控制机构15 的底部设有转动杆,转动杆与安装座14相连,通过控制转动杆的转动来控制安装座14的角度,进而是该驱动底盘可以转弯。
驱动机构2包括滚动杆7、从动轮6、皮带5、主动轮4和电机3。电机3 设置在底座1的底部,主动轮4设置在电机3的输出端。滚动杆7通过连接座17与底座1相连。滚动杆7与连接座17枢接,从动轮6套接在滚动杆7 上。从动轮6与电机3通过皮带5联动连接。
还包括固定螺栓8,滚轮10通过固定螺栓8与滚动杆7固定连接。
如图5所示,滚动杆7可在连接座17上自由转动,电机3通过皮带5可带动滚动杆7旋转。滚轮10的轴承为中空状,且穿过联动杆11并延伸至联动杆11的内侧,同时,滚动杆7为中空且内壁上设有螺纹。固定螺栓8的长度要大于联动杆11的厚度,使得固定螺栓8可穿过联动杆11与滚动杆7螺纹连接,进而使得位于底座1后端的滚轮10可拆卸下来。
还包括联动杆11,联动杆11的一端与多接头块13上的限位杆16套接,另一端与滚轮10枢接。联动杆11可通过三个开口9中的任意一个开口9与限位杆16套接。
还包括限位块12限位块12套在联动杆11上且与开口9的大小相适配。
工作原理:使用时,首先人员可以通过控制方向控制机构15使得位于底座1前端的滚轮10改变角度进而可以调节机器人的行进方向,再通过电机3 的工作,使得主动轮4、皮带5、从动轮6联动,进而使得滚动杆7移动,由于滚轮10通过固定螺栓8与滚动杆7固定连接,所以滚轮10转动,当需要替换、卸下所使用的滚轮10时,通过将限位杆16拿出,将新的滚轮10上的联动杆11从另一个开口9插入,转动多接头块13使得新的滚轮10替换旧的滚轮10的位置并将旧的滚轮10卸下,在重新插入限位杆16使得多接头块13 固定。
综上所述,该机器人驱动底盘,通过通过设置的底座1、方向控制机构 15、驱动机构2、多接头块13、滚轮10和限位杆16的相互配合,使得本实用新型可以在不需要通过千斤顶的支撑或者将机器人反转后对轮子进行更换和维修。大大提高了本实用新型的更换轮子的速度。方便人员的维修、维护工作。同时也减小在维修或者维护轮子的工作中,出现因挤压而使得外部传感器损坏的可能。
机器人驱动底盘专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0