








专利摘要
本发明涉及机器人自动化技术领域,具体涉及一种基于多传感器的机器人任务示教方法及系统,所述系统包括固定装置、与所述固定装置活动连接的滑动装置、设置于所述滑动装置上的传感装置、设置于机器人本体的控制装置和驱动装置;所述固定装置包括固定基座、直线滑轨;所述滑动装置包括卡滑动平台、结构件、末端件;所述传感装置包括弹性装置、直线位置传感器、电桥电路、视觉传感器;通过传感装置感知所述结构件的力和力矩,通过视觉传感器检测所述末端件与待测工件表面的几何特征信息,从而获取机器人末端件的姿态误差补偿信息,进而得出机器人补偿后的关节角度信息,本发明具有很高的经济实用性。
权利要求
1.一种基于多传感器的机器人任务示教系统,其特征在于,包括固定装置、与所述固定装置活动连接的滑动装置、设置于所述滑动装置上的传感装置、设置于机器人本体的控制装置和驱动装置;
所述固定装置包括固定基座(110),设置于固定基座(110)上的直线滑轨(120);
所述滑动装置包括卡接于所述直线滑轨(120)的滑动平台(210),与所述滑动平台(210)固定连接的结构件(220),与所述结构件(220)另一端固定连接的末端件(230);
所述传感装置包括连接所述固定基座(110)与所述滑动平台(210)的弹性装置(310),设置于所述直线滑轨(120)与所述滑动平台(210)上的直线位置传感器(320),设置于所述结构件(220)上的电桥电路(330),设置于所述滑动平台(210)上端的视觉传感器(340);
所述弹性装置(310)用于连接固定基座(110)与滑动平台(210);
所述直线位置传感器(320)用于检测直线滑轨(120)与滑动平台(210)的相对位移;
所述电桥电路(330)用于通过检测电桥电路(330)的电压差;
对所述结构件(220)施加外力时,所述电桥电路(330)的应变片电阻值相应改变,从而产生电压差;所述视觉传感器(340)用于采集图像信息,从而获取所述末端件(230)与待测工件表面的几何特征;
所述控制装置用于计算末端件230位姿的误差补偿以及机器人补偿后的关节角度;
所述驱动装置与控制装置电连接,用于根据所述控制装置发送的控制指令驱动机器人运动。
2.根据权利要求1所述的一种基于多传感器的机器人任务示教系统,其特征在于,所述结构件(220)沿其轴线设置有两个空心槽(240、250),所述空心槽(240、250)内部为立方体通孔,所述立方体通孔的方向与所述结构件(220)的轴线方向垂直,且两个空心槽(240、250)的通孔方向相互垂直;
所述空心槽(240)的外表面设置有四个应变片(241、242、243、244),所述空心槽(250)的外表面同样设置有四个应变片(251、252、253、254),其中每个外表面分别设置有两个应变片,设置于两个空心槽上的应变片分别形成两组电桥电路。
3.根据权利要求1所述的一种基于多传感器的机器人任务示教系统,其特征在于,所述结构件(220)为立方体金属。
4.根据权利要求1所述的一种基于多传感器的机器人任务示教系统,其特征在于,所述滑动装置上端设置有支架,所述视觉传感器(340)设置于所述支架上,所述视觉传感器(340)面向末端件(230)。
5.根据权利要求1所述的一种基于多传感器的机器人任务示教系统,其特征在于,所述末端件(230)包括但不限于橡胶滚轮、刷子、刀片、圆柱砂轮;所述弹性装置(310)为拉簧;所述直线位置传感器(320)为线性滑动变阻器。
6.应用于权利要求1-5中任一所述的一种基于多传感器的机器人任务示教系统的机器人任务示教方法,其特征在于,所述方法包括,
将末端件(230)与待测工件表面接触,进而通过传感装置获取结构件(220)的力和力矩;
通过视觉传感器(340)采集图像信息,从而获取所述末端件(230)与待测工件表面的几何特征;
通过控制装置得出末端件(230)位姿的误差补偿以及机器人补偿后的关节角度,并将所述误差补偿和关节角度信息发送给驱动装置;
所述驱动装置根据所述误差补偿和关节角度信息控制机器人的运动输出。
7.根据权利要求6所述的一种基于多传感器的机器人任务示教方法,其特征在于,所述通过视觉传感器(340)采集图像信息,从而获取所述末端件(230)与待测工件表面的几何特征具体包括:
通过视觉传感器(340)获取景深图像信息和彩色图像信息;
通过利用点云库中的点云信息对末端件(230)与待测工件进行三维重建,分别获取末端件(230)与待测工件的三维点云信息;
根据分离后的三维点云信息检测所述末端件(230)与待测工件表面的几何特征信息,将所述几何特征信息作为进行机器人的姿态补偿的输入信息。
8.根据权利要求6所述的一种基于多传感器的机器人任务示教方法,其特征在于,所述得出末端件(230)位姿的误差补偿以及机器人补偿后的关节角度具体包括:
将结构件(220)的力和力矩信息与选定的参考基准力信息进行对比,得出末端件(230)位姿的误差补偿信息;
根据误差补偿信息和几何特征,获取末端件(230)的姿态补偿信息和机器人补偿后的关节角度信息。
9.根据权利要求7所述的一种基于多传感器的机器人任务示教方法,其特征在于,所述姿态补偿包括:沿滑动平台(210)方向的位移,末端件(230)的自转角和侧向转角的姿态补偿。
说明书
技术领域
本发明涉及机器人自动化技术领域,具体涉及一种基于多传感器的机器人任务示教方法及系统。
背景技术
应用在贴胶带,打磨,表面清理等方面的专用机器人末端执行器,在作业过程中,与待加工表面有接触力的控制要求,因此感知末端执行器与工件表面的接触力,在此类接触式机器人作业中是非常有必要的;同时,作业任务往往需要机器人末端执行器有柔顺性位置补偿及力适应功能以实现柔顺的接触式作业。比如在机器人对曲面贴胶带或进行曲面的表面清理时,需要末端执行器有一定的柔顺性以与表面保持良好的接触,避免钢性冲击。
而现有的多维力传感器产品基于复杂的结构设计,价格较高,且没有柔性构建来适应接触过程中的力与位置的误差补偿,实际精度也不理想。
因此,对贴胶带,表面清理及打磨等方面的专用机器人末端执行器进行改进,提供一种更加经济实用的解决途径成为很有必要解决的问题。
发明内容
本项专利申请,提出一种基于多传感器的机器人任务示教方法及系统,通过基于应变片和位置传感器的用于机器人末端执行器的三维力感知及单轴柔性位置补偿的传感装置,经济实用。
本发明提供的一种基于多传感器的机器人任务示教系统,包括固定装置、与所述固定装置活动连接的滑动装置、设置于所述滑动装置上的传感装置、设置于机器人本体的控制装置和驱动装置;
所述固定装置包括固定基座,设置于固定基座上的直线滑轨;
所述滑动装置包括卡接于所述直线滑轨的滑动平台,与所述滑动平台固定连接的结构件,与所述结构件另一端固定连接的末端件;
所述传感装置包括连接所述固定基座与所述滑动平台的弹性装置,设置于所述直线滑轨与所述滑动平台上的直线位置传感器,设置于所述结构件上的电桥电路,设置于所述滑动平台上端的视觉传感器;
所述弹性装置用于连接固定基座与滑动平台;
所述直线位置传感器用于检测直线滑轨与滑动平台的相对位移;
所述电桥电路用于通过检测电桥电路的电压差;
所述视觉传感器用于采集图像信息,从而获取所述末端件与待测工件表面的几何特征;
所述控制装置用于计算末端件位姿的误差补偿以及机器人补偿后的关节角度;
所述驱动装置与控制装置电连接,用于根据所述控制装置发送的控制指令驱动机器人运动。
进一步,所述结构件沿其轴线设置有两个空心槽,所述空心槽内部为立方体通孔,所述立方体通孔方向与所述结构件的轴线方向垂直,且两个空心槽的通孔方向相互垂直;
所述空心槽的外表面设置有四个应变片,所述空心槽的外表面同样设置有四个应变片,其中每个外表面分别设置有两个应变片,设置于两个空心槽上的应变片分别形成两组电桥电路。
进一步,所述结构件为立方体金属。
进一步,所述滑动装置上端设置有支架,所述视觉传感器设置于所述支架上,所述视觉传感器面向末端件。
进一步,所述末端件,包括但不限于橡胶滚轮、刷子、刀片、圆柱砂轮;所述弹性装置为拉簧;所述直线位置传感器为线性滑动变阻器。
应用于上述任一所述的一种基于多传感器的机器人任务示教系统的机器人任务示教方法,所述方法包括:
将末端件与待测工件表面接触,进而通过传感装置获取结构件的力和力矩;
通过视觉传感器采集图像信息,从而获取所述末端件与待测工件表面的几何特征;
通过控制装置得出末端件位姿的误差补偿以及机器人补偿后的关节角度,并将所述误差补偿和关节角度信息发送给驱动装置;
所述驱动装置根据所述误差补偿和关节角度信息控制机器人的运动输出。
进一步,所述通过视觉传感器采集图像信息,从而获取所述末端件与待测工件表面的几何特征具体包括:
通过视觉传感器获取景深图像信息和彩色图像信息;
通过利用点云库中的点云信息对末端件与待测工件进行三维重建,分别获取末端件与待测工件的三维点云信息;
根据分离后的三维点云信息检测所述末端件与待测工件表面的几何特征信息,将所述几何特征信息作为进行机器人的姿态补偿的输入信息。
进一步,所述得出末端件位姿的误差补偿以及机器人补偿后的关节角度具体包括:
将结构件的力和力矩信息与选定的参考基准力信息进行对比,得出末端件位姿的误差补偿信息;
根据误差补偿信息和几何特征,获取末端件的姿态补偿信息和机器人补偿后的关节角度信息。
进一步,所述获取机器人末端件的姿态补偿信息和机器人补偿后的关节角度所述姿态补偿包括:沿滑动平台方向的位移,末端件的自转角和侧向转角的姿态补偿。
本发明的有益效果是:本发明公开一种基于多传感器的机器人任务示教方法及系统,所述系统包括固定装置、与所述固定装置活动连接的滑动装置、设置于所述滑动装置上的传感装置、设置于机器人本体的控制装置和驱动装置;所述固定装置包括固定基座,设置于固定基座上的直线滑轨;所述滑动装置包括卡接于所述直线滑轨的滑动平台,与所述滑动平台固定连接的结构件,与所述结构件另一端固定连接的末端件;所述传感装置包括连接所述固定基座与所述滑动平台的弹性装置,设置于所述直线滑轨与所述滑动平台上的直线位置传感器,设置于所述结构件上的电桥电路,设置于所述滑动平台上端的视觉传感器;所述弹性装置用于连接固定基座与滑动平台;所述直线位置传感器用于检测直线滑轨与滑动平台的相对位移;所述电桥电路用于通过检测电桥电路的电压差;所述视觉传感器用于采集图像信息,从而获取所述末端件与待测工件表面的几何特征;所述控制装置用于计算末端件位姿的误差补偿以及机器人补偿后的关节角度;所述驱动装置与控制装置电连接,用于根据所述控制装置发送的控制指令驱动机器人运动。
本公开实现的力传感器和附加的视觉传感器的感知信息,实现单轴柔性位置补偿和力的自适应,是价格低廉的三维力/力矩感知方案,针对作业的实际需要,提供了有效的力感知和位置及力柔顺补偿手段,作为机器人自动化应用设备的开发的直接实现手段,具有很高的经济实用性。
附图说明
下面结合附图和实例对本发明作进一步说明。
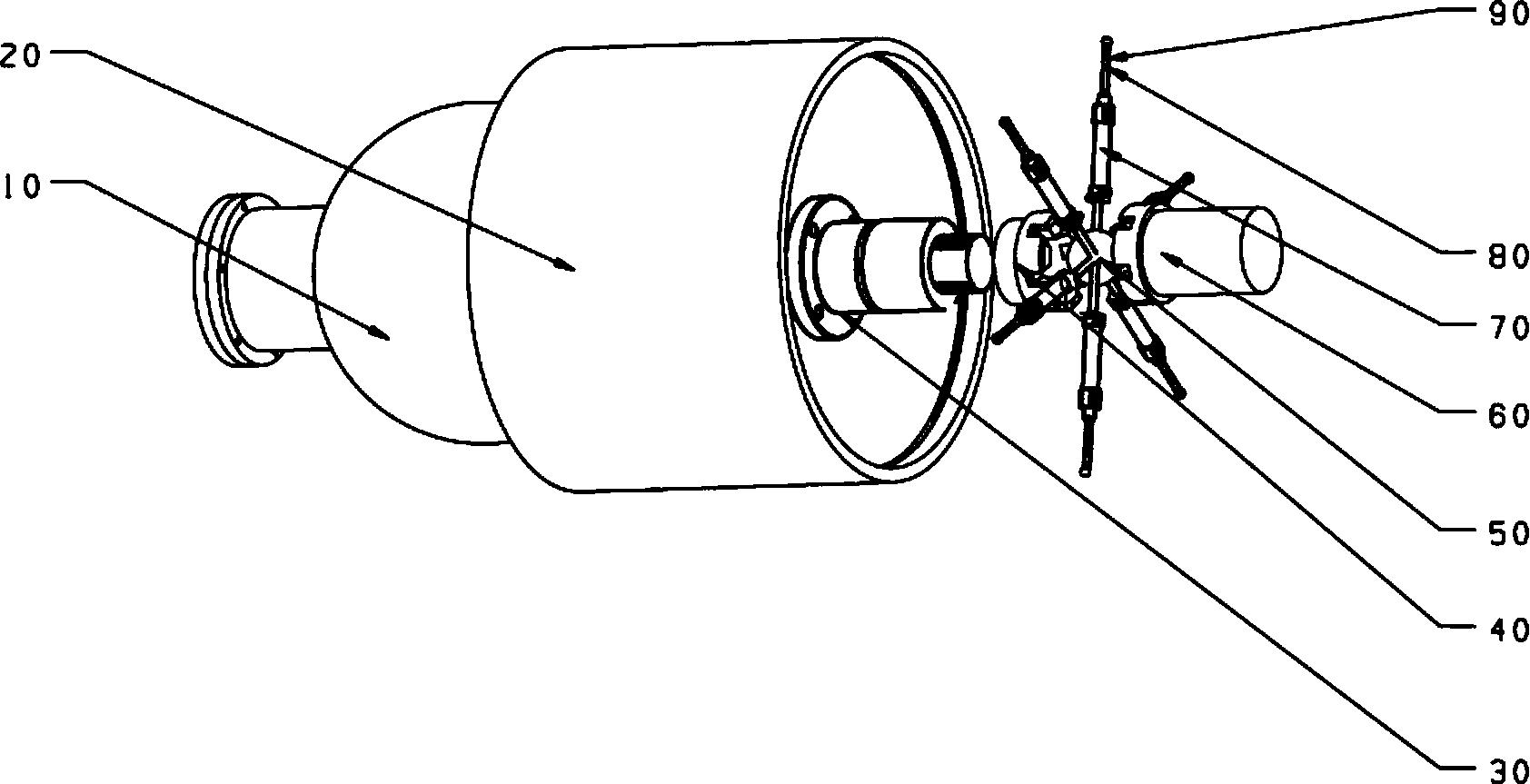
图1是本公开实施例一种基于多传感器的机器人任务示教系统的结构示意图;
图2是本公开实施例一种结构件及应变片的一面结构示意图;
图3是本公开实施例一种结构件及应变片的另一面结构示意图;
图4是本公开实施例一种结构件及应变片的又一面结构示意图;
图5是本公开实施例第一电桥电路的结构示意图;
图6是本公开实施例第二电桥电路的结构示意图;
图7是本公开实施例一种基于多传感器的机器人任务示教方法的流程图图;
图8是本公开实施例一种基于多传感器的机器人任务示教方法步骤S2的流程图图。
具体实施方式
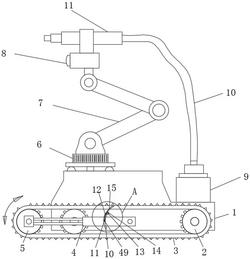
参考图1~4,本实施例提供的一种基于多传感器的机器人任务示教系统,包括固定装置100、与所述固定装置100活动连接的滑动装置200、设置于所述滑动装置200上的传感装置300、设置于机器人本体的控制装置400和驱动装置500;
所述固定装置100包括固定基座110,设置于固定基座110上的直线滑轨120;
所述滑动装置200包括卡接于所述直线滑轨120的滑动平台210,与所述滑动平台210固定连接的结构件220,与所述结构件220另一端固定连接的末端件230;
所述传感装置300包括连接所述固定基座110与所述滑动平台210的弹性装置310,设置于所述直线滑轨120与所述滑动平台210上的直线位置传感器320,设置于所述结构件220上的电桥电路330,设置于所述滑动平台210上端的视觉传感器340;
所述弹性装置310用于连接固定基座110与滑动平台210;
所述直线位置传感器320用于检测直线滑轨120与滑动平台210的相对位移,从而获取沿滑轨方向的正压力Fy;
所述电桥电路330用于通过检测电桥电路330的电压差,从而获取沿Z方向的压力Fz和扭矩τz;
所述视觉传感器340用于采集图像信息,从而获取所述末端件230与待测工件表面的几何特征;
所述控制装置400用于计算末端件230位姿的误差补偿以及机器人补偿后的关节角度;
所述驱动装置500与控制装置400电连接,用于根据所述控制装置400发送的控制指令驱动机器人运动。
进一步,所述结构件220沿其轴线设置有两个空心槽240、250,所述空心槽240、250内部为立方体通孔,所述立方体通孔方向与所述结构件220的轴线方向垂直,且两个空心槽240、250的通孔方向相互垂直;
所述空心槽240的外表面设置有四个应变片241、242、243、244,所述空心槽250的外表面同样设置有四个应变片251、252、253、254,其中每个外表面分别设置有两个应变片,设置于两个空心槽上的应变片分别形成两组电桥电路;
其中,所述应变片241、242、243、244组成第一电桥电路331,所述应变片251、252、253、254组成第二电桥电路332。
进一步,所述结构件220为立方体金属,相应的,所述空心槽外表面为平面。
优选的,所述滑动装置200上端设置有支架,所述视觉传感器340设置于所述支架上,所述视觉传感器340面向末端件230,所述视觉传感器340为景深双目摄像头。
进一步,所述末端件230,包括但不限于橡胶滚轮、刷子,刀片,圆柱砂轮;所述弹性装置310为拉簧;所述直线位置传感器320为线性滑动变阻器。
参考图5~8,基于上述任一所述的一种基于多传感器的机器人任务示教系统,本实施例还提供一种基于多传感器的机器人任务示教方法,所述方法包括:
步骤S1、将末端件230与待测工件表面接触,进而通过传感装置300获取结构件220的力和力矩,具体为结构件220的轴向力Fy,压力Fz和力矩τz;
步骤S2、通过视觉传感器340采集图像信息,从而获取所述末端件230与待测工件表面的几何特征;
步骤S3、通过控制装置400计算末端件230位姿的误差补偿以及机器人补偿后的关节角度,并将所述误差补偿和关节角度信息发送给驱动装置500;
所述驱动装置500根据所述误差补偿和关节角度信息控制机器人的运动输出。
其中,结构件220的轴向力Fy通过以下方式获取:
在Fy力作用下,滑台会带动弹性装置310拉伸,相对于固定在固定基座上的滑轨沿负Y方向平移,平移的位移x由直线位置传感器320直接测量得到,已知弹簧的弹性系数k,则有Fy=-kx;
结构件220的压力Fz通过以下方式获取:
电桥电路如图6所示,第二电桥电路332的电压为Ue,当对结构件220施加外力时,第二电桥电路332的应变片电阻值R251、R252、R253、R254相应改变,从而产生电压差Uout2,经过传感器标定,可以得到Fz=kfz·Uout2,其中,kfz代表应变片所在的构件位置的对Fz的刚度系数。
结构件220的力矩τz通过以下方式获取:
电桥电路如图5所示,第一电桥电路331的电压为Ue,当对结构件220施加外力时,第一电桥电路331的应变片电阻值R241、R242、R243、R244相应改变,从而产生电压差Uout1,经过传感器标定,可以得到τz=kτz·Uout1,其中,kτz代表应变片所在的构件位置的对Fz的刚度系数。
进一步,所述通过视觉传感器340采集图像信息,从而获取所述末端件230与待测工件表面的几何特征具体包括:
步骤S21、通过视觉传感器340获取景深图像信息和彩色图像信息;本实施例采用景深双目摄像头对末端件230与待测工件进行图像采集,能够准确感知视觉信息,并分离出不同的图像信息;
步骤S22、通过利用点云库中的点云信息对末端件230与待测工件进行三维重建,根据分离后的景深图像信息和彩色图像信息分别获取末端件230与待测工件的三维点云信息;
步骤S23、根据分离后的三维点云信息检测所述末端件230与待测工件表面的几何特征信息,将所述几何特征信息作为进行机器人的姿态补偿的输入信息。
进一步,对于实际的作业对象,其接触力和力矩需要在选定的范围,所述得出末端件230位姿的误差补偿以及机器人补偿后的关节角度具体包括:
将结构件220的力和力矩信息与选定的参考基准力信息进行对比,得出末端件230位姿的误差补偿信息;
根据误差补偿信息和几何特征,获取末端件230的姿态补偿信息,进而通过机器人逆运动学得出机器人补偿后的关节角度信息。
进一步,所述姿态补偿包括:沿滑动平台210方向的位移,末端件230的自转角和侧向转角的姿态补偿。
通过传感器感知Fy的大小,实时控制机器人末端位置以调整正压力。
通常而言,对于贴胶带及表面清理等作业,Fy沿着工件表面的法向,以便有效的完成任务,在这种情况下Fz通常接近于0。
当检测到的Fz超过设定的阈值时,则所述待测工件的压力偏离法向,从而及时调整待测工件的转角。
当Fy沿法向时,τz的值为0。
当检测到的τz超过设定的阈值时,则所述待测工件表面正压力Fy偏离法向,从而及时调整待测工件末端的侧向偏转角。
以上所述,只是本发明的较佳实施例而已,本发明并不局限于上述实施方式,只要其以相同的手段达到本发明的技术效果,都应属于本发明的保护范围。
一种基于多传感器的机器人任务示教方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0