








专利摘要
本发明针对现有的梯形加速、S形加速方法存在的动力源驱动力不能充分利用的技术问题,提供了一种3-PRS并联机构速度优化方法,属于机器人运动学领域。该方法首先计算末端要求位姿曲线对应的滑块高度,然后计算所述滑块高度对应的速度与加速度,接着求优化系数,最后据此优化系数设置滑块的运动规律并控制并联机构运动。以3-PRS并联机构三个分支的等效负载与瞬时广义力之和不大于驱动力为约束条件,得到随时间变化的优化系数,进而用所述优化系数控制三个滑块的运动规律。本发明提供的优化方法使3-PRS并联机构在不同工作状态下充分利用动力源的驱动力,提高了末端运行的速度与工作效率。
权利要求
1.一种3-PRS并联机构速度优化方法,其特征在于:包括以下步骤:
S1:用逆解方法计算末端要求位姿曲线对应的滑块高度Hi(t) (i=1,2,3),其中,自变量t为时间;
S2:用微分方法计算所述滑块高度Hi(t)对应的滑块速度vi(t)与滑块加速度;
S3:求优化系数K(t),使滑块在所述优化系数控制下获得最快的运动速度;
S4:根据所述优化系数K(t)设置滑块的运动规律,控制并联机构运动。
2.根据权利要求1所述的3-PRS并联机构速度优化方法,其特征在于:步骤S3中,所述优化系数K(t)的求解方法是:列出三个分支形成的以所述优化系数K(t)为未知量的不等式组,包含了3个不等式,分别代表3-PRS并联机构三个分支的等效负载与广义力之和不大于驱动力;求解此不等式组,得到所述优化系数K(t)的取值范围,取此范围的最大值作为所述优化系数K(t)。
3.根据权利要求2所述的3-PRS并联机构速度优化方法,其特征在于:步骤S3中,所述优化系数K(t)的求解方法是:将所述自变量 t的时间区间分为首尾相接的时间子区间,每个所述时间子区间的中点时刻对应的所述优化系数作为该所述时间子区间的所述优化系数K(t)。
4.根据权利要求2或3所述的3-PRS并联机构速度优化方法,其特征在于:当用于位置控制方式时,所述滑块高度 的运动规律为 。
5.根据权利要求2或3所述的3-PRS并联机构速度优化方法,其特征在于:当用于速度控制方式时,所述滑块速度 的运动规律为 。
6.根据权利要求4所述的3-PRS并联机构速度优化方法,其特征在于:所述优化系数为不大于K(t)的任意非负函数。
7.根据权利要求5所述的3-PRS并联机构速度优化方法,其特征在于:所述优化系数为不大于K(t)的任意非负函数。
说明书
技术领域
本发明涉及一种3-PRS并联机构速度优化方法,属于机器人运动学领域。
背景技术
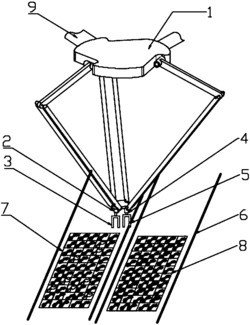
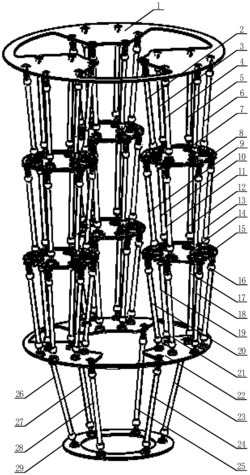
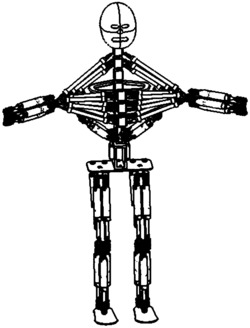
并联机构具有刚度大、承载能力强、精度高等优点,已成功应用于集成电路加工、精密制造、航空航天等领域。其中,如图1所示的具有三个自由度的3-PRS (P为移动副,R为转动副,S为球面副)并联机构是少自由度并联机构的典型代表之一,由于自由度较少,比六自由度并联机构结构简单,经济便宜,控制相对容易,因此具有广阔的应用前景。
末端位姿精度、承载力、运动速度、工作空间的大小与形状等是并联机构重要的性能指标,特别是运动速度严重影响末端执行器的工作效率。更快的运动速度通常意味着更高的工作效率,因此应充分利用驱动源的最大动力来提高运动速度。但是,由于3-PRS并联机构的三个分支相互耦合,每个分支的等效质量、等效转动惯量等运动参数都随着末端位姿、速度、加速度等运动状态的变化而变化。在动力源确定的情况下,最大速度、最大加速度取决于末端位姿、速度、加速度、机构尺寸等。为了获得良好的速度性能,通常采用梯形加速、S形加速等方法。这些方法通常用等效质量、等效转动惯量的极限值或它们的简化形式来进行速度规划,而3-PRS并联机构的等效质量、等效转动惯量随运动状态变化很大。这就导致了不能充分地利用动力源的驱动力,浪费了可利用的富足动力。
发明内容
本发明针对现有的梯形加速、S形加速方法存在的动力源驱动力不能充分利用的技术问题,提供了一种3-PRS并联机构速度优化方法。以3-PRS并联机构三个分支的等效负载与瞬时广义力之和不大于驱动力为约束条件,得到随时间变化的优化系数,进而用所述优化系数控制三个滑块的运动规律。本发明对3-PRS并联机构及其运动控制的设计、分析及优化,促进其在工业生产中的广泛应用,具有重要的学术意义与实用价值。
本发明的技术方案是这样实现的:
一种3-PRS并联机构速度优化方法,具体包括以下步骤:
S1:用逆解方法计算末端要求位姿曲线对应的滑块高度 Hi(t) (i=1,2,3),其中,自变量t为时间;
S2:用微分方法计算所述滑块高度Hi(t)对应的滑块速度vi(t)与滑块加速度;
S3:求所述优化系数K(t),使滑块在所述优化系数控制下获得最快的运动速度;
S4:根据所述优化系数K(t)设置滑块的运动规律,控制并联机构运动。
进一步,步骤S3中,所述优化系数K(t)的求解方法是:列出三个分支形成的以所述优化系数K(t)为未知量的不等式组,包含3个不等式,分别代表3-PRS并联机构三个分支的等效负载与广义力之和不大于驱动力;求解此不等式组,得到所述优化系数K(t)的取值范围,取此范围的最大值作为所述优化系数K(t)。
进一步,所述优化系数K(t)的求解方法是:将所述自变量t的时间区间分为首尾相接的时间子区间,每个所述时间子区间的中点时刻对应的所述优化系数作为该所述时间子区间的所述优化系数K(t)。
进一步,当用于位置控制方式时,所述滑块高度 的运动规律为 。
进一步,当用于速度控制方式时,所述滑块速度 的运动规律为 。
再进一步,所述优化系数为不大于K(t)的任意非负函数。
本发明具有的有益的效果是:
(1) 本发明提供的优化方法使3-PRS并联机构在不同工作状态下充分利用动力源的驱动力,提高了末端运行的速度,提高了效率。
(2) 本发明技术方案中,控制三个滑块的运动规律的优化系数本质上是三个滑块运动规律在时间轴上的公共伸缩系数,即通过控制此伸缩系数来控制速度与加速度,以直接的工程技术视角解决技术问题,形象直观。
(3) 本发明技术方案的步骤S1中,计算末端要求位姿曲线对应的滑块高度时,用逆解方法,充分利用了并联机构正解计算困难、逆解计算容易的特点,方便应用。
(4) 本发明技术方案的步骤S2中,滑块速度与滑块加速度的求解方法适用性广。如果机构末端位姿运动规律简单,则直接用连续函数的求导方法计算;如果机构末端位姿运动规律复杂,则采用数值方法计算导数。
(5) 本发明提供的优化方法可用于3-PRS并联机构的位置控制方法,也可用于速度控制方式,具有很强的通用性。
附图说明
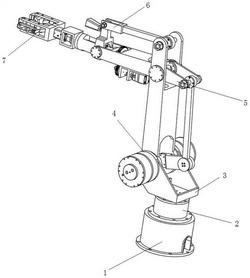
图1为3-PRS并联机构示意图。
图中:
1——固定平台 2——运动平台 3——立柱 4——滑块
5——转动副 6——连杆 7——球面副 8——刀具。
具体实施方式
为使本发明的目的、技术方案和有益效果更加清楚,下面将通过实施方式对本发明作进一步地详细描述。
3-PRS并联机构的结构示意图如图1所示。系统由固定平台1、运动平台2、三个垂直立柱3、三个滑块4、三个转动副5、三个连杆6、三个球面副7组成。其中,滑块4在立柱3的竖直导轨上滑动,滑块4与连杆6通过转动副5连接,连杆6与运动平台2通过球面副7连接,刀具8固定在运动平台2的几何中心。
图1中,固定平台1简化为三角形 、运动平台2简化为三角形、三个垂直立柱简化为 、三个连杆6简化为 ,三个滑块4及转动副5都简化为 。
固定平台1和运动平台2的等效作用形状均为等边三角形,即 , ,刀具8固定在运动平台2的几何中心 且垂直于运动平台 。
图1中, 分别是连杆 的长度及与立柱 的夹角;三角形 和三角形 的外接圆半径分别为R和r,刀尖P到运动平台 的距离oTP为h; H1、H2、H3为三个滑块4的高度。
分别在固定平台1和运动平台2上建立静坐标系OXYZ和动坐标系oTxyz,其中O在B2B3中点处,X轴方向与OB1重合,Z轴竖直向上, x轴与oTP1重合,z轴垂直运动平台2向上。
运动平台2的姿态运动规律由三个所述滑块4的所述滑块高度Hi(t)(i=1,2,3)的运动规律确定。为了克服现有的梯形加速、S形加速方法存在的动力源驱动力不能充分利用的技术问题,本发明提供了一种3-PRS并联机构速度优化方法,其过程描述如下:
S1:用逆解方法计算末端要求位姿曲线对应的所述滑块高度Hi(t) (i=1,2,3),其中,自变量t为时间;
S2:求所述滑块高度Hi(t)对应的滑块速度vi(t)与滑块加速度ai(t);
S3:求所述优化系数K(t),使滑块4在所述优化系数控制下获得最快的运动速度;
S4:根据所述优化系数K(t)设置滑块4的运动规律,控制并联机构运动。
其中,步骤S3中,所述优化系数K(t)的求解方法是:列出三个分支形成的以所述优化系数K(t)为未知量的不等式组,包含了3个不等式,分别代表3-PRS并联机构三个分支的等效负载与广义力之和不大于驱动力;求解此不等式组,得到所述优化系数K(t)的取值范围,取此范围的最大值为作为对应的所述时间区间的K(t)。
当末端要求位姿曲线复杂时,将所述滑块高度Hi(t)、所述滑块速度vi(t)与所述滑块加速度ai(t)进行离散,将所述自变量t的时间区间分为N个首尾相接的时间子区间,宽度为 (j=1,2,…,N),所述时间子区间的中点时刻tj对应的所述优化系数 (j=1,2,…,N)作为第j个所述时间子区间的K(t)。
当本发明提供的优化方法用于位置控制方式时,所述滑块高度 的运动规律为 。
当本发明提供的优化方法用于速度控制方式时,所述滑块速度 的运动规律为 。
当所述优化系数K(t)的表达式太复杂或对3-PRS并联机构速度性能要求不高时,为了简化运动规律、降低控制程序的复杂性,将所述优化系数K(t)简化为不大于K(t)的任意非负函数。现有的梯形加速、S形加速方法即为本发明提出的所述优化系数K(t)简化的两个特例而已。
列出三个分支形成的以所述优化系数K(t)为未知量的不等式组是求解所述优化系数K(t)的关键,下面以一个简化的实施例子来进行描述。
Bi(i=1,2,3)在静坐标系OXYZ下的坐标向量为
(1)。
同理,在动坐标系oTxyz下,球铰Pi与刀尖P的坐标向量为
(2)。
设动坐标系oTxyz相对于静坐标系OXYZ的齐次转换矩阵为
(3)
式中, 分别为动坐标系oTxyz的x、y、z轴的方向矢量在于静坐标系OXYZ下的方向余弦, 是oT在静坐标系OXYZ下的坐标。
球铰Pi与刀尖P在静坐标系OXYZ下的位置表示为
(4)
式中, 分别表示其在静坐标系OXYZ和动坐标系oTxyz下的坐标向量。
3-PRS并联机构的三个连杆6与滑块4通过圆柱铰接,则Pi只能在BiCi和CiPi所形成的平面内运动,由此得到三个约束方程
(5)
式中,Yi为Pi点在静坐标系OXYZ下的Y坐标。
联立式(2)-(5),得
(6)
则得
(7)。
取X-Y-Z型欧拉角 表示动坐标系oTxyz相对于静坐标系OXYZ的姿态,得到转换矩阵T的表达式为
(8)
式中,
。
联立式(7)与(8),得
(9)。
滑块Ci相对于静坐标系OXYZ的Z轴坐标为Hi,Bi点的坐标为 ,Pi点的坐标为 ,当已知3-PRS的机构尺寸和 时,则能推导出所述滑块高度Hi(t),为了表述更加清晰、直观,下面用Hi代替Hi(t)。
(10)。
Pi在动坐标系oTxyz下的坐标为 ,则根据Pi点在三条支链中的机构尺寸表达式和转换矩阵表达式相等,得到下列式子
(11)
(12)。
在静坐标系OXYZ下,设滑块Ci均质且质心在竖直立柱上,连杆CiPi均质且质心坐标为 ,则有
(13)
(14)
(15)。
设连杆CiPi的质心速度为 ,绕质心的转动惯量为Ji,平台P1P2P3质心为oT,相对于静坐标系OXYZ的速度和角速度分别为 和 ,绕质心的惯量矩阵为JP。滑块4和运动平台2的质量分别为mhi和mp,取B1B2B3为零势能面,重力加速度为g,各个连接部分的摩擦力不计。
则
(16)。
运动平台2实际惯量矩阵中,除了主对角线上的Jxx、Jyy、Jzz 外,其他的量级较小,故在简化算法中忽略不计,令
(17)。
则机构的动能T和势能V表示为
(18)
(19)。
将式(13)、(14)、(15)对时间t求导,为了表述更加清晰、直观,下面用 代替 。
将结果代入式(18)得
(20)
其中,
式中,
(21)
其中, 为机构的等效质量,式(11)分别对广义坐标H1、H2、H3求导数,就求得参数Ai、Bi、Ci、Di、Ei、Fi、Gi、Mi、Ni的值。
拉格朗日方程中的函数L被定义为系统的动能T和势能V之差,即L=T-V。广义坐标值为H1、H2、H3,相应广义坐标速度为 。设FG1、FG2、FG3为系统的广义力,则拉格朗日方程为
(22)。
式(22)化简得
(23)
式(23)中含有参数 (i=1,2,3;j=1,2,3)。
结合式(9),则式(11)对广义坐标H1、H2、H3求二阶导数,解方程组求得 。
受所述优化系数K(t)控制时,所述滑块高度Hi(t) (i=1,2,3)对应的滑块速度 与滑块加速度 的表达式为
(24)。
设驱动力及负载等效力分别为FGi及FFi (i=1,2,3),将式(24)代入式(23)中,得到关于未知量K(t)的不等式组
(25)
求解不等式组(25),则得所述优化系数K(t)。
上述给出给出的求解所述优化系数K(t)的例子中,是在保证通用性的基础上做了简化处理。3-PRS并联机构有很多的变种,可参见论文《不同连杆布置方式下3-PRS并联机构寄生运动的比较(Parasitic motion comparison of 3-PRS parallel mechanism with different limb arrangements)》(Robotics and Computer-Integrated Manufacturing, Vol.27, No.2, pp.389-396,2011)。在应用的过程中,需要根据3-PRS并联机构的具体结构形式,改写公式(1)~(23),增加或删除相应的构建模型,如增加末端执行器(刀具)部分、移动副传动中滚珠丝杠或直线电机等部分。
本发明的方法的特点是:
(1) 本发明提供的优化方法使3-PRS并联机构在不同工作状态下充分利用动力源的驱动力,提高了末端运行的速度,提高了效率。
(2) 本发明技术方案中,控制三个滑块的运动规律的优化系数本质上是三个滑块运动规律在时间轴上的公共伸缩系数,即通过控制此伸缩系数来控制速度与加速度,以直接的工程技术视角解决技术问题,形象直观。
(3) 本发明技术方案的步骤S1中,计算末端要求位姿曲线对应的滑块高度时,用逆解方法,充分利用了并联机构正解计算困难、逆解计算容易的特点,方便应用。
(4) 本发明技术方案的步骤S2中,滑块速度与滑块加速度的求解方法适用性广。如果机构末端位姿运动规律简单,则直接用连续函数的求导方法计算;如果机构末端位姿运动规律复杂,则采用数值方法计算导数。
(5) 本发明提供的优化方法可用于3-PRS并联机构的位置控制方法,也可用于速度控制方式,具有很强的通用性。
本发明的应用,解决了3-PRS并联机构动力源驱动力利用不充分的问题,极大地提高了末端执行器的工作效率。特别有助于从3-PRS并联机构设计开始阶段就做到优化,降低机械、电气等硬件成本,促进3-PRS并联机构在工业、农业、服务业等领域的广泛应用。而且本发明提供的方法也为其他类型并联机构的速度优化提供了借鉴,具有良好的社会和经济效益。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,本领域技术人员利用上述提示的技术内容做出的简单修改、等同变化或修饰,均落在本发明的保护范围内。
3-PRS并联机构速度优化方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0