








专利摘要
本实用新型涉及无人机方向控制装置技术领域,具体的说是一种无人机方向控制装置,包括无人机壳体,所述无人机壳体底端中间通过螺钉安装有中央控制器,所述无人机壳体上表面四个方位均一体成型设有支杆,四个所述支杆末端均一体成型设有安装筒,每个所述安装筒内还均放置有伺服电机,所述伺服电机输出端均采用联轴器安装有转轴,四个所述转轴外壁均通过轴承共同安装有连接框架组件,利用L形板上的锁紧螺栓和螺纹孔位的配合调节相邻L形板的间距,从而能使得四个伺服电机能够快速与对应大小的无人机进行固定,再利用连接框架组件将四个伺服电机同时放在对应的安装筒内,随后利用旋转气缸带动压块快速将四个伺服电机从上部压紧固定。
权利要求
1.一种无人机方向控制装置,包括无人机壳体(1),其特征在于:所述无人机壳体(1)底端中间通过螺钉安装有中央控制器(2),所述无人机壳体(1)上表面四个方位均一体成型设有支杆(101),四个所述支杆(101)末端均一体成型设有安装筒(102),每个所述安装筒(102)内还均放置有伺服电机(3),所述伺服电机(3)输出端均采用联轴器安装有转轴(4),四个所述转轴(4)外壁均通过轴承共同安装有连接框架组件(5),四个所述转轴(4)顶端部均通过螺钉等距安装有扇叶(6),每个所述安装筒(102)顶端均成对通过螺钉安装有旋转气缸(7),每个所述旋转气缸(7)底部均通过螺钉安装有压块(8);
所述连接框架组件(5)还包括有若干个L形板(501)以及锁紧螺栓(502),每个所述L形板(501)上均等距开设有螺纹孔位(503),所述锁紧螺栓(502)通过对应的螺纹孔位(503)将相邻两个L形板(501)进行固定。
2.按照权利要求1所述的一种无人机方向控制装置,其特征在于:所述无人机壳体(1)底部还安装有蓄电池组(9),所述无人机壳体(1)顶部铺设安装有太阳能电池板(10),所述中央控制器(2)分别通过导线与伺服电机(3)、旋转气缸(7)和蓄电池组(9)以及太阳能电池板(10),所述无人机壳体(1)外壁还安装有与中央控制器(2)电性连接的GPS导航仪(12)。
3.按照权利要求1所述的一种无人机方向控制装置,其特征在于:每个所述安装筒(102)上的两个旋转气缸(7)均关于对应的转轴(4)左右对称设置。
4.按照权利要求1所述的一种无人机方向控制装置,其特征在于:每个所述安装筒(102)底部均通过螺钉安装有用于托住伺服电机(3)底部的空心环板(11),每个所述伺服电机(3)的电源线均通过对应空心环板(11)延伸至其外侧。
5.按照权利要求1所述的一种无人机方向控制装置,其特征在于:所述L形板(501)的数量为四个,且每个所述L形板(501)上均成对安装有锁紧螺栓(502)。
说明书
技术领域
本实用新型涉及无人机方向控制装置技术领域,具体的说是一种无人机方向控制装置。
背景技术
现有技术中所采用的无人机方向调节靠的是四个机翼风扇不同转速来改变的,并借助中央控制器进行发布指令,但是,现有无人机方向控制装置不能便于适应不同大小的无人机进行快速稳定的安装或者拆卸维修,从而无人机方向控制装置拆装效率较慢,因而还需改进处理。
实用新型内容
为了弥补以上不足,本实用新型提供了一种无人机方向控制装置,以解决上述背景技术中的问题。
本实用新型的技术方案是:一种无人机方向控制装置,包括无人机壳体,所述无人机壳体底端中间通过螺钉安装有中央控制器,所述无人机壳体上表面四个方位均一体成型设有支杆,四个所述支杆末端均一体成型设有安装筒,每个所述安装筒内还均放置有伺服电机,所述伺服电机输出端均采用联轴器安装有转轴,四个所述转轴外壁均通过轴承共同安装有连接框架组件,四个所述转轴顶端部均通过螺钉等距安装有扇叶,每个所述安装筒顶端均成对通过螺钉安装有旋转气缸,每个所述旋转气缸底部均通过螺钉安装有压块;
所述连接框架组件还包括有若干个L形板以及锁紧螺栓,每个所述L形板上均等距开设有螺纹孔位,所述锁紧螺栓通过对应的螺纹孔位将相邻两个L 形板进行固定。
作为优选方案,所述无人机壳体底部还安装有蓄电池组,所述无人机壳体顶部铺设安装有太阳能电池板,所述中央控制器分别通过导线与伺服电机、旋转气缸和蓄电池组以及太阳能电池板,所述无人机壳体外壁还安装有与中央控制器电性连接的GPS导航仪。
作为优选方案,每个所述安装筒上的两个旋转气缸均关于对应的转轴左右对称设置。
作为优选方案,每个所述安装筒底部均通过螺钉安装有用于托住伺服电机底部的空心环板,每个所述伺服电机的电源线均通过对应空心环板延伸至其外侧。
作为优选方案,所述L形板的数量为四个,且每个所述L形板上均成对安装有锁紧螺栓。
与现有技术相比,本申请的技术效果:利用L形板上成对设置的锁紧螺栓和若干个螺纹孔位的配合便于调节相邻L形板的间距,从而能够使得四个伺服电机能够快速与对应大小的无人机进行固定,待固定好L形板的位置后,再利用连接框架组件将四个伺服电机同时放置在对应的安装筒内,随后利用安装筒对应的旋转气缸带动压块快速将四个伺服电机从上部压紧固定,这样设置不仅便于适应不同的无人机进行使用,还能够增加四个伺服电机的安装效率,即方便快速安装用于调节方位的四个伺服电机,由中央控制器控制伺服电机进行相应运作去控制无人机的飞行方向。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
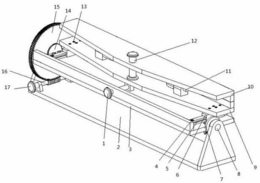
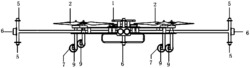
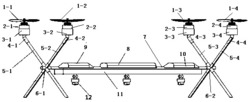
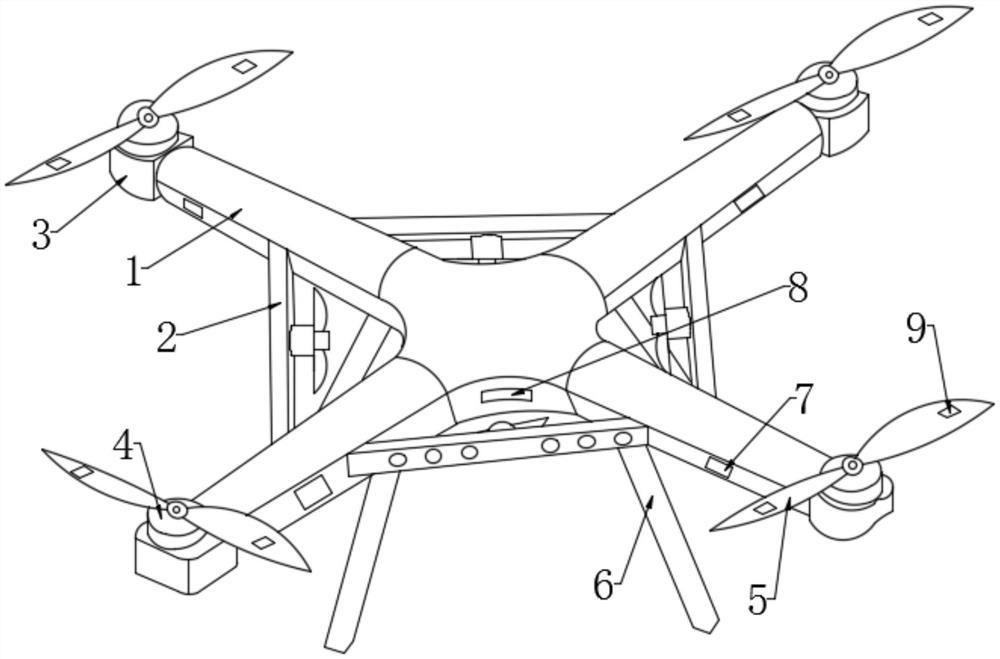
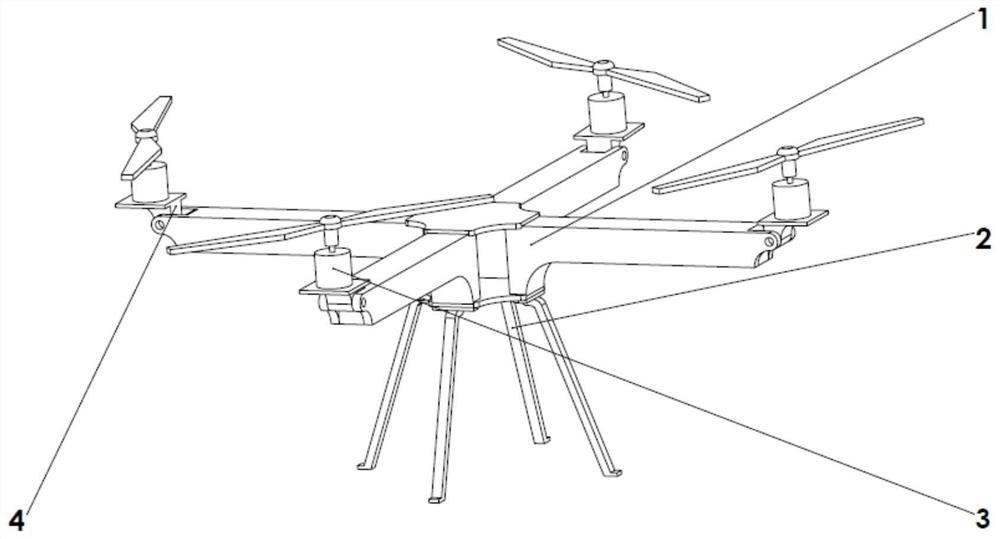
图1为本实用新型结构示意图;
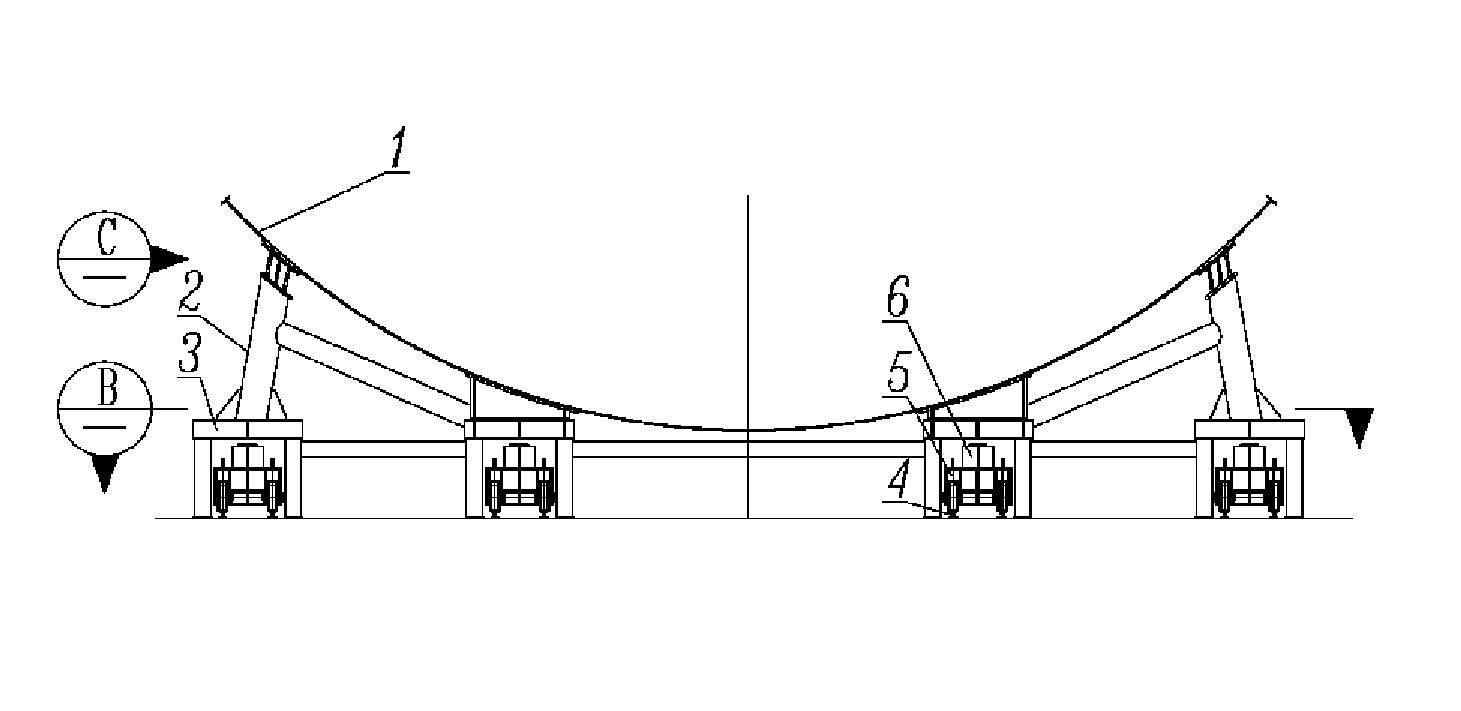
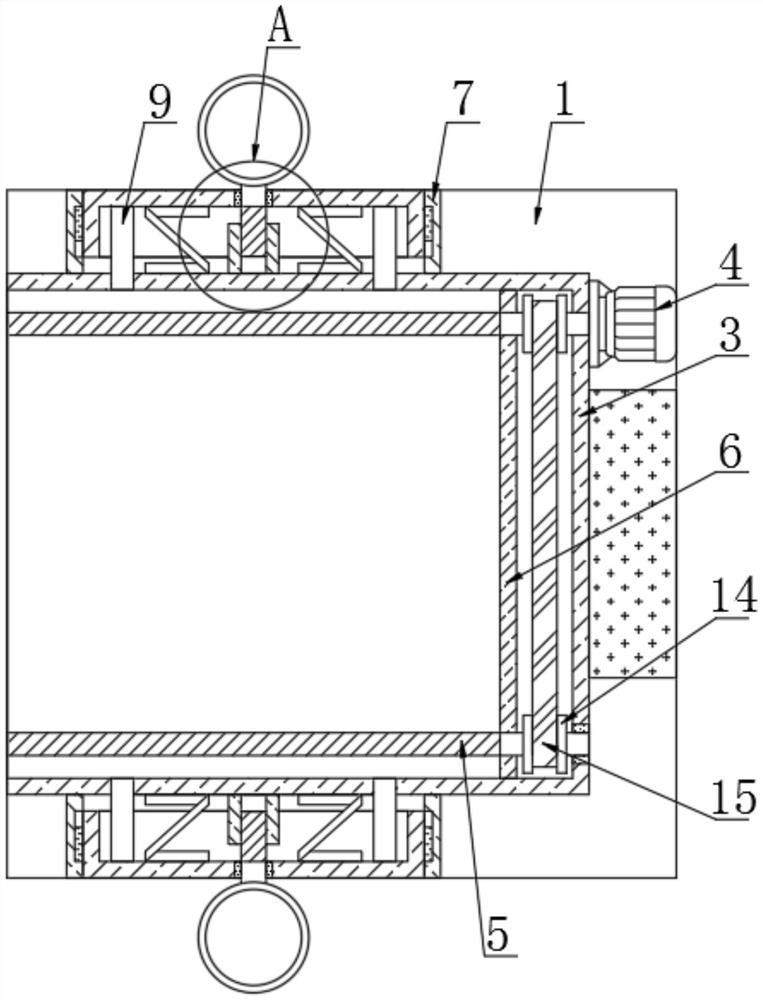
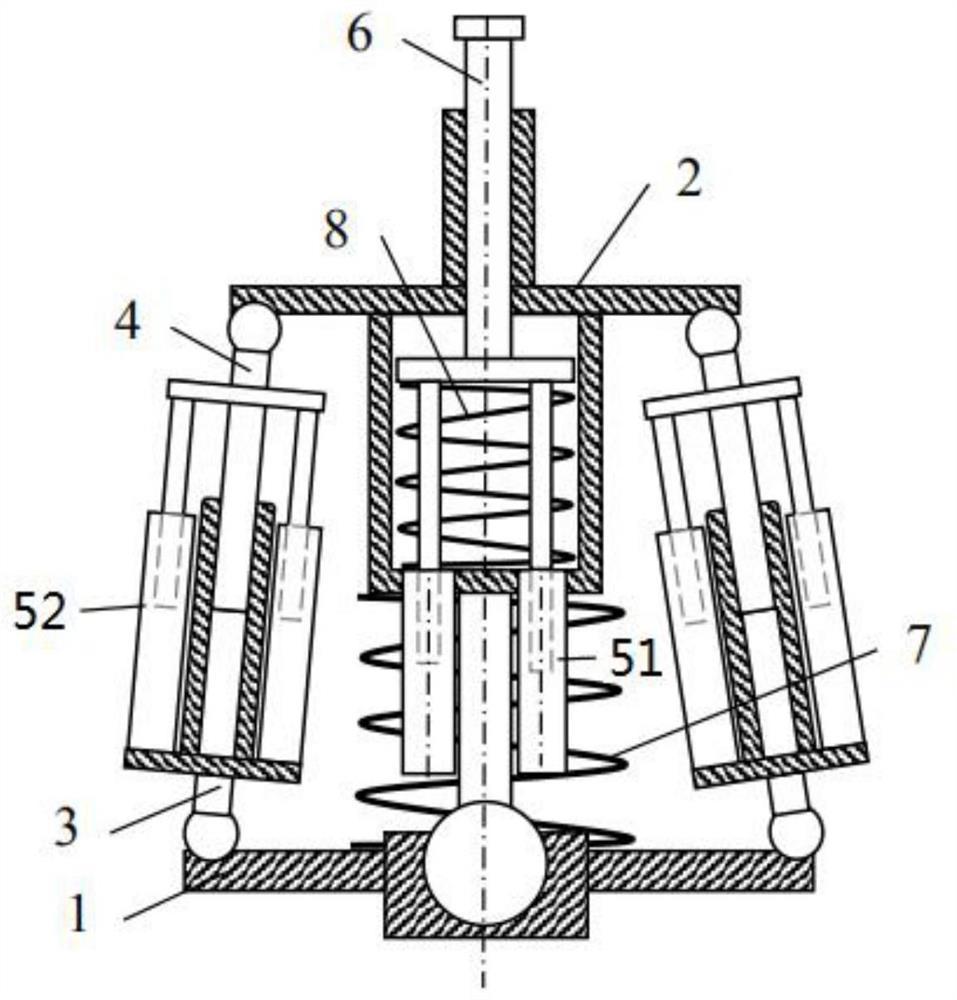
图2为本实用新型图1中的正面结构示意图;
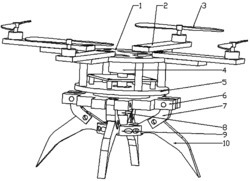
图3为本实用新型安装筒和空心环板之间俯视位置关系结构示意图。
其中,附图标记汇总如下:1-无人机壳体;101-支杆;102-安装筒;2- 中央控制器;3-伺服电机;4-转轴;5-连接框架组件;501-L形板;502-锁紧螺栓;503-螺纹孔位;6-扇叶;7-旋转气缸;8-压块;9-蓄电池组;10-太阳能电池板;11-空心环板;12-GPS导航仪。
具体实施方式
下面结合附图和具体实施例进一步说明本实用新型。
参考图1-3可知,本实用新型一种无人机方向控制装置,包括无人机壳体1,所述无人机壳体1底端中间通过螺钉安装有中央控制器2,具体实施时候,所述无人机壳体1底部还安装有蓄电池组9,所述无人机壳体1顶部铺设安装有太阳能电池板10,所述中央控制器2分别通过导线与伺服电机3、旋转气缸7和蓄电池组9以及太阳能电池板10,所述无人机壳体1外壁还安装有与中央控制器2电性连接的GPS导航仪12,借助中央控制器2和太阳能电池板10的配合能够将太阳能转化为电能存储在蓄电池组9内,从而完成连续供电,随后再借助蓄电池组9将存储的电传输至中央控制器2,由中央控制器 2控制伺服电机3进行相应运作去控制无人机的飞行方向,同时需要说明的是伺服电机3、旋转气缸7、蓄电池组9、太阳能电池板10以及GPS导航仪12 的控制方式是通过中央控制器2来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现。
所述无人机壳体1上表面四个方位均一体成型设有支杆101,四个所述支杆101末端均一体成型设有安装筒102,每个所述安装筒102内还均放置有伺服电机3,所述伺服电机3输出端均采用联轴器安装有转轴4,四个所述转轴 4外壁均通过轴承共同安装有连接框架组件5,四个所述转轴4顶端部均通过螺钉等距安装有扇叶6,每个所述安装筒102顶端均成对通过螺钉安装有旋转气缸7,旋转气缸7为旋转90度然后下压,每个所述旋转气缸7底部均通过螺钉安装有压块8;具体而言,所述连接框架组件5还包括有若干个L形板 501以及锁紧螺栓502,每个所述L形板501上均等距开设有螺纹孔位503,所述锁紧螺栓502通过对应的螺纹孔位503将相邻两个L形板501进行固定,每个所述安装筒102上的两个旋转气缸7均关于对应的转轴4左右对称设置,每个所述安装筒102底部均通过螺钉安装有用于托住伺服电机3底部的空心环板11,每个所述伺服电机3的电源线均通过对应空心环板11延伸至其外侧,所述L形板501的数量为四个,且每个所述L形板501上均成对安装有锁紧螺栓502,利用L形板501上成对设置的锁紧螺栓502和若干个螺纹孔位503 的配合便于调节相邻L形板501的间距,从而能够使得四个伺服电机3能够快速与对应大小的无人机进行固定,待固定好L形板501的位置后,再利用连接框架组件5将四个伺服电机3同时放置在对应的安装筒102内,随后利用安装筒102对应的旋转气缸7带动压块8快速将四个伺服电机3从上部压紧固定,这样设置不仅便于适应不同的无人机进行使用,还能够增加四个伺服电机3的安装效率,即方便快速安装用于调节方位的四个伺服电机3。
为了本领域的普通技术人员更好的理解本实用新型,结合附图简要说明本实用新型的工作过程:利用L形板501上成对设置的锁紧螺栓502和若干个螺纹孔位503的配合便于调节相邻L形板501的间距,从而能够使得四个伺服电机3能够快速与对应大小的无人机进行固定,待固定好L形板501的位置后,再利用连接框架组件5将四个伺服电机3同时放置在对应的安装筒 102内,随后利用安装筒102对应的旋转气缸7带动压块8快速将四个伺服电机3从上部压紧固定,这样设置不仅便于适应不同的无人机进行使用,还能够增加四个伺服电机3的安装效率,即方便快速安装用于调节方位的四个伺服电机3,由中央控制器2控制伺服电机3进行相应运作去控制无人机的飞行方向。
需要说明的是伺服电机3、中央控制器2、旋转气缸7、蓄电池组9、太阳能电池板10以及GPS导航仪12的具体型号需要依据该设置的具体规格进行计算,相应的计算方式属于该领域的现有技术,故不再赘述。
伺服电机3、旋转气缸7、蓄电池组9、太阳能电池板10以及GPS导航仪 12的控制方式是通过中央控制器2来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,在此不予详细说明。
以上显示和描述了本实用新型的基本原理、主要特征及本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
一种无人机方向控制装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0