

IPC分类号 : B64C27/08I,B64D47/00I,B64D47/08I,B64F3/00I,B23K26/36I,B23K26/70I,B08B7/00I同样的发明创造已同日申请发明专利







专利摘要
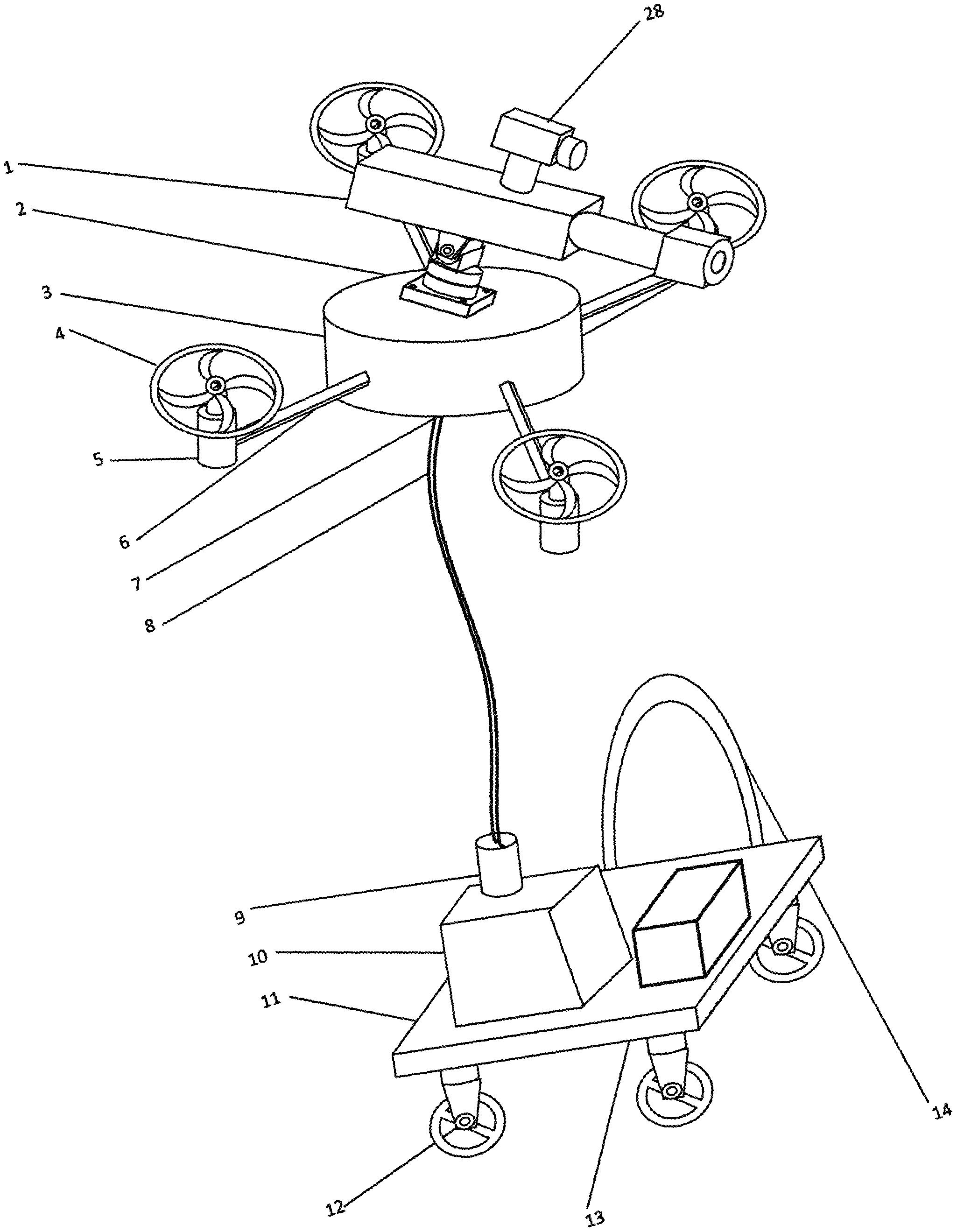
一种四旋翼无人机式激光清洗装置,它在载具无人机上搭载激光清洗装置,利用四旋翼无人机搭载激光发射器配合智能计算机能够准确的定点清除需作业面。它主要包括上部分无人机本体、下部分移动车车体以及激光除锈装置,下部分车体设置光纤激光器,设置一个光纤与电缆束万 向连接器,光纤下端通过连接器连接在车体上,光纤上端连接在上部无人机上,无人机部分包括:光纤激光输出臂、云台、摄像头、飞行器本体、旋翼、旋翼电机、连杆、激光扫描头.俯仰电机支撑块、水平转动台、底座、俯仰电机。控制器经有线传输给光纤激光器上,信号再输入到光纤激光输出臂和云台,从而使激光输出臂输出激光并且按照规定方向运动。
权利要求
1.一种四旋翼无人机式激光清洗装置,其特征为:在四旋翼无人机上搭载安装激光清洗扫描头,它主要包括上部分无人机本体和下部分移动车车体,无人机部分包括:光纤激光输出臂、云台、摄像头、飞行器本体、旋翼、旋翼电机、连杆、激光扫描头,其中:光纤激光输出臂的底面安装在云台的俯仰平板上螺钉连接,云台的底板利用螺钉安装在无人机机体上面中心位置,摄像头底面安装在激光输出臂上螺钉连接,下部分车体设置光纤激光器,设置一个光纤与电缆束万向连接器,光纤下端通过连接器连接在光纤激光器,光纤上端连接在上部无人机上,下部分车体上面设置激光器与计算机控制中心,包括:光纤与电缆束、光纤与电缆束万向连接器、光纤激光器、控制器,小车手柄安装在车体侧边,移动车车体下面安装四个万向脚轮,云台采用水平转动台、底座、俯仰电机及其相关组件构成,从控制器引线连接到光纤激光输出臂和云台上,控制器通过控制线发送信号来控制光纤激光输出臂和云台,云台的水平转动台采用三百六十度舵机,俯仰电机采用一百八十度舵机,形成锈蚀工作面周围立体三维激光除锈清洗空间,设置具有预设路径的清除需作业面的智能软件的计算机控制器,设置实时监控清洗的监控系统,构成无人机飞行空间路线与云台结合的全空间方位的激光清洗系统。
说明书
一、技术领域:属于清洁工业技术领域。
二、背景技术:
激光清洗技术是指利用高能激光束照射工件表面,使表面的污物、锈斑或涂层发生瞬间蒸发或剥离,高速有效地清除清洁对象表面附着物或表面涂层,从而达到洁净的工艺过程。激光清洗是一种新型高效的环保清洗技术,是基于激光与物质相互作用效应的一项新技术。与传统的机械清洗法、化学清洗法和超声波清洗法不同、它不需要任何破坏臭氧层的有机溶剂,无污染,无噪声,对人体和环境无害,是一种绿色清洗技术,现在众多领域中逐步取代传统清洗工艺。
在清洗大型轮船船体等大型设备中,传统的清洗机大多采用桁架式和爬壁式,桁架式结构复杂,空间尺度有限,不够灵活;爬壁式稳定性与灵活性都比较差。本实用新型涉及一种四旋翼无人机式激光清洗装置,结构简单,稳定性与灵活性都很好,空间尺度很大,克服了传统方式的缺点。
三、实用新型内容:
本实用新型涉及一种四旋翼无人机式激光清洗装置,主要包括光纤激光输出臂、飞行器本体、激光扫描头、光纤与电缆束、光纤激光器、移动车车体等。
一种四旋翼无人机式激光清洗装置,它是可以安放在载具无人机上的激光清洗装置,利用四旋翼无人机搭载激光发射器配合智能计算机能够准确的定点清除需作业面。它主要包括上部分无人机本体、下部分移动车车体以及激光除锈装置,下部分车体设置光纤激光器,设置一个光纤与电缆束万向连接器,光纤下端通过连接器连接在车体上,光纤上端连接在上部无人机上。无人机部分包括:光纤激光输出臂、云台、摄像头、飞行器本体、旋翼、旋翼电机、连杆、激光扫描头,其中:云台的转轴顶端设置法兰;所述支座位于所述无人机本体上方;所述激光除锈设备包括:光纤激光输出臂、云台、激光扫描头、光纤激光器、光纤与电缆束、光纤与电缆束万向连接器。云台包括:俯仰平板、螺纹孔、俯仰摆板、键、轴孔、俯仰电机轴、俯仰电机支撑块、水平转动台、底座、俯仰电机。控制器经有线传输给光纤激光器上,信号再输入到光纤激光输出臂和云台,从而使激光输出臂输出激光并且按照规定方向运动。
内容一、设置移动车车体
设置移动车车体,它包括移动车车体、万向脚轮和手柄,在移动车车体下安装四个万向脚轮,一侧安装小车手柄,用来移动车体。其中万向脚轮、手柄与移动车车体均采用螺钉连接。
内容二、设置带有光纤激光输出臂的四悬臂无人机
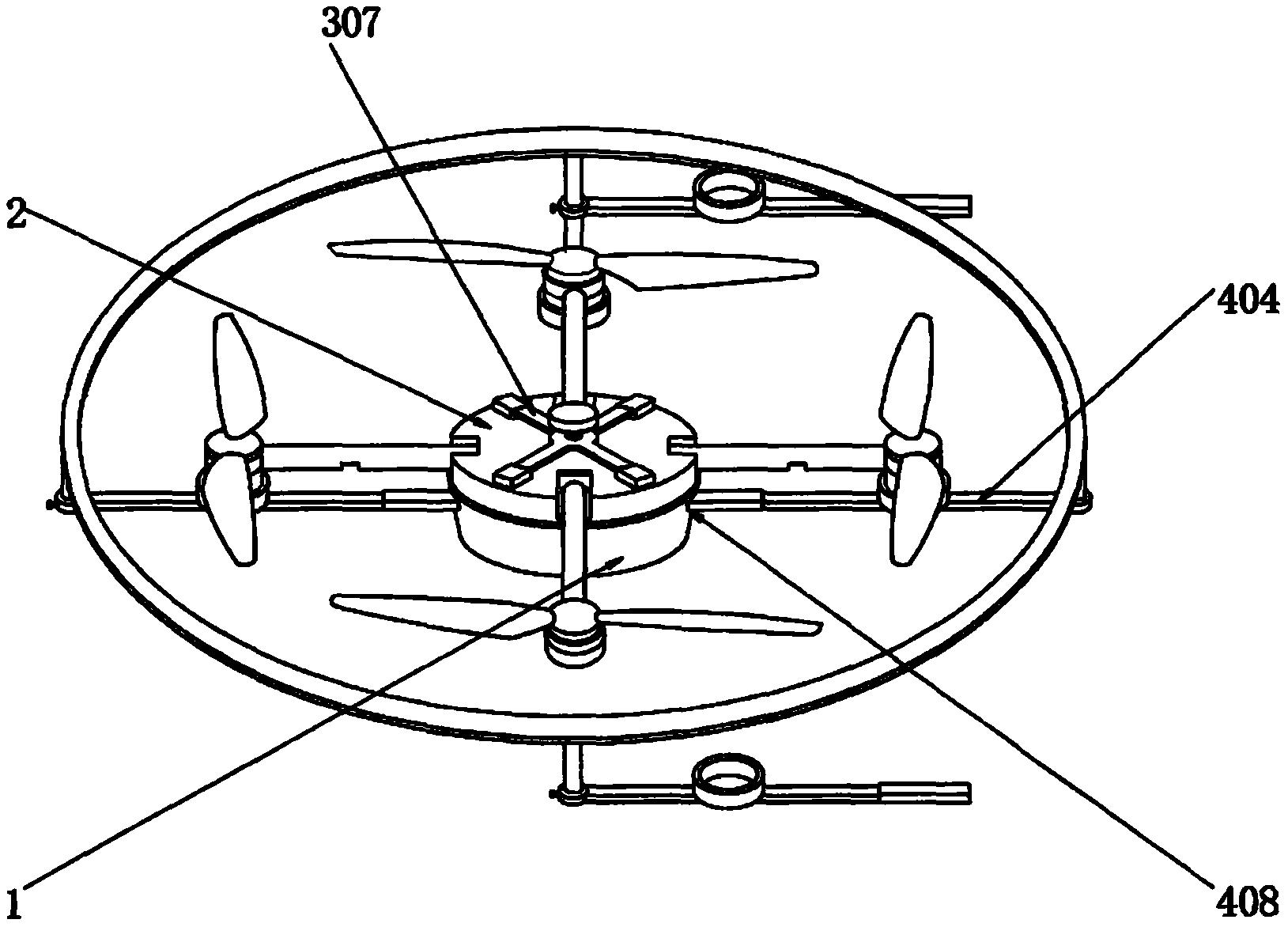
设置无人机部分,它由无人机本体和旋翼及电机组成,在无人机本体四周设置旋翼,旋翼与本体通过连杆连接,每个旋翼下别固定一个旋翼电机,旋翼通过电机驱动。旋翼桨采用碳纤维桨,设置为电动桨,配置整流罩外壳,外壳把电机包住,用来调整气流,并起到保护作用。旋翼与本体之间的连杆的安装方法是胶粘接与机械螺纹连接结合的方法。
无人机本体上设置云台,云台在无人机本体上安装是用法兰盘螺钉固定的方法。云台上安放激光输出臂,激光输出臂通过螺栓连接在云台上,输出臂上方安装摄像头,输出臂前端设置激光扫描头。为了能对工作表面进行实时监控,设置了由云台和摄像头组成的监控装置,通过无线传输将视频信号传回控制台,从而达到高效率的工作。云台采用俯仰平板、俯仰摆板、俯仰电机轴、俯仰电机支撑块、水平转动台、底座、俯仰电机及其相关组件构成,从控制器引线连接到光纤激光输出臂和云台上,控制器通过控制线发送可变宽度或脉冲宽度调制的电脉冲来控制光纤激光输出臂和云台。
内容三、设置控制器和驱动系统及其相关组件
在移动车车体上设置光纤激光器和控制器,然后将从控制器引出的信号线接到光纤激光器上,在光纤激光器上安置光纤与电缆束万向连接器,连接器上安装光纤和电缆束,通过光纤与电缆束连接激光输出臂,这样激光除锈硬件控制系统就完成了,控制器经有线传输给光纤激光器上,经驱动器放大后的脉冲信号再输入到光纤激光输出臂,从而使激光输出臂输出激光。通过云台和摄像头实时监控并反馈到控制器,通过控制器控制云台从而使光纤激光输出臂按照规定的方向运动。
实用新型的核心内容:
1.一种四旋翼无人机式激光清洗装置,在四旋翼无人机上搭载安装激光清洗扫描头,它主要包括上部分无人机本体和下部分移动车车体,无人机部分包括:光纤激光输出臂、云台、摄像头、飞行器本体、旋翼、旋翼电机、连杆、激光扫描头,其中:光纤激光输出臂的底面安装在云台的俯仰平板上螺钉连接,云台的底板利用螺钉安装在无人机机体上面中心位置,摄像头底面安装在激光输出臂上螺钉连接,下部分车体设置光纤激光器,设置一个光纤与电缆束万向连接器,光纤下端通过连接器连接在光纤激光器,光纤上端连接在上部无人机上,下部分车体上面设置激光器与计算机控制中心,包括:光纤与电缆束、光纤与电缆束万向连接器、光纤激光器、控制器,小车手柄安装在车体侧边,移动车车体下面安装四个万向脚轮,云台采用水平转动台、底座、俯仰电机及其相关组件构成,从控制器引线连接到光纤激光输出臂和云台上,控制器通过控制线发送信号来控制光纤激光输出臂和云台,云台的水平转动台采用三百六十度舵机,俯仰电机采用一百八十度舵机,形成锈蚀工作面周围立体三维激光除锈清洗空间,设置具有预设路径的清除需作业面的智能软件的计算机控制器,设置实时监控清洗的监控系统,构成无人机飞行空间路线与云台结合的全空间方位的激光清洗系统。
2.在工作过程中,操控遥控器,发出相应的指令信号,车载控制器接收到信号后通过信号线传递给无人机与激光器,激光输出臂按照指令信号发射激光,同时摄像头会将采集到的图像信号传回控制控器的屏幕上,工作人员操控无人机飞行空间路线与云台结合的全空间方位,通过飞行视角和激光扫描头的方位的联动,实施全方位激光清洗,高效完成清洗工作。
四、附图说明:
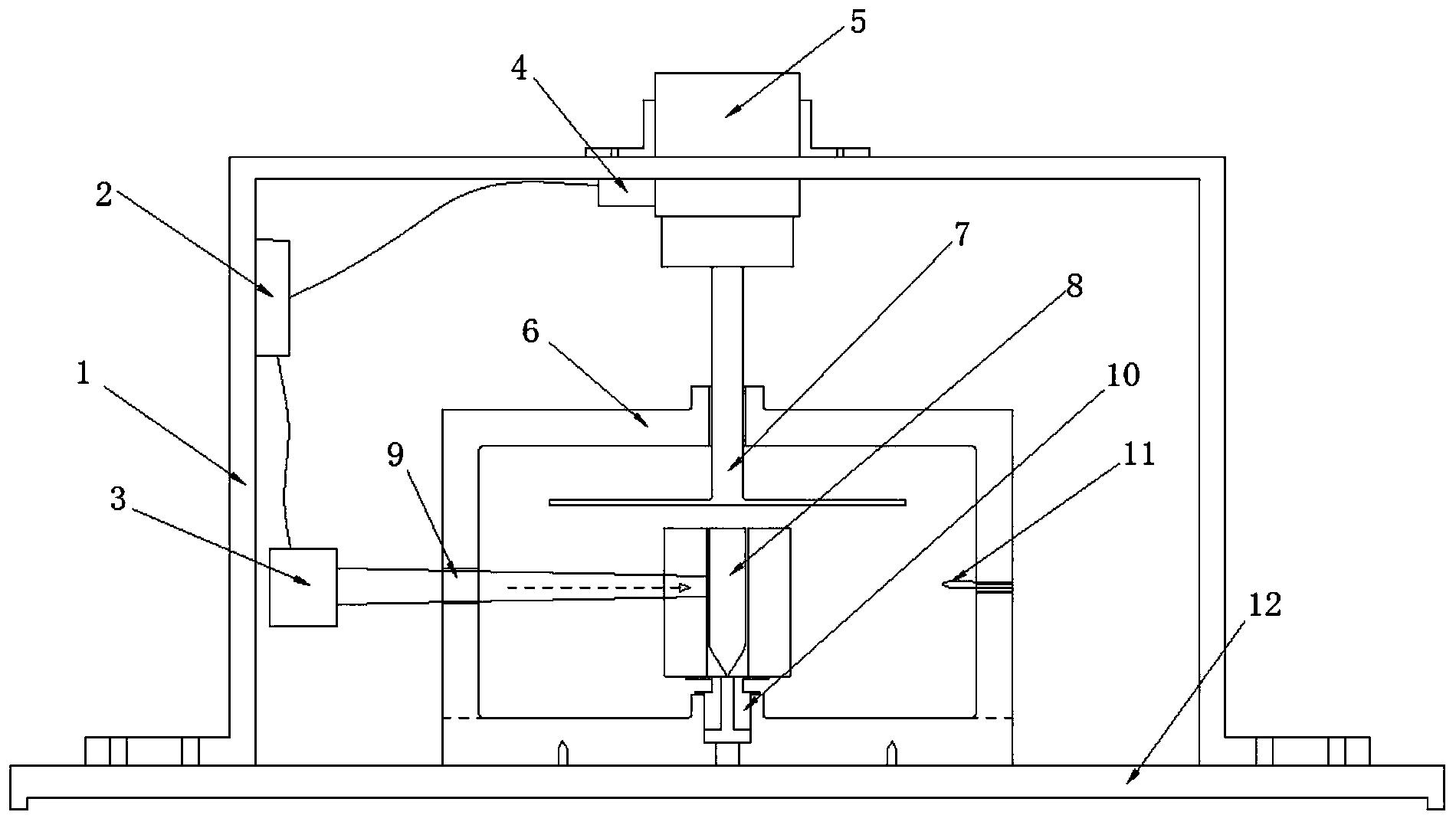
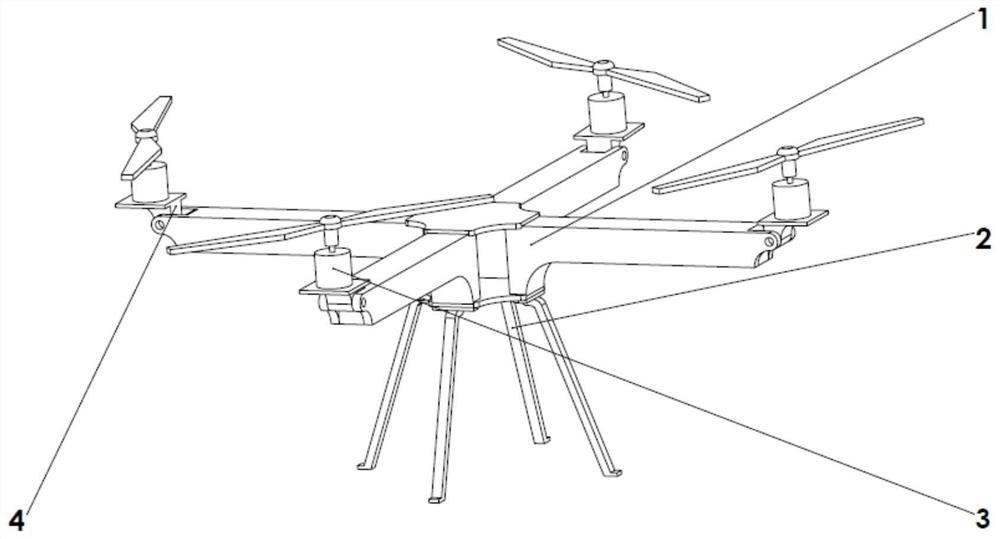
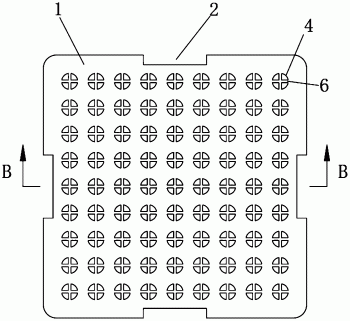
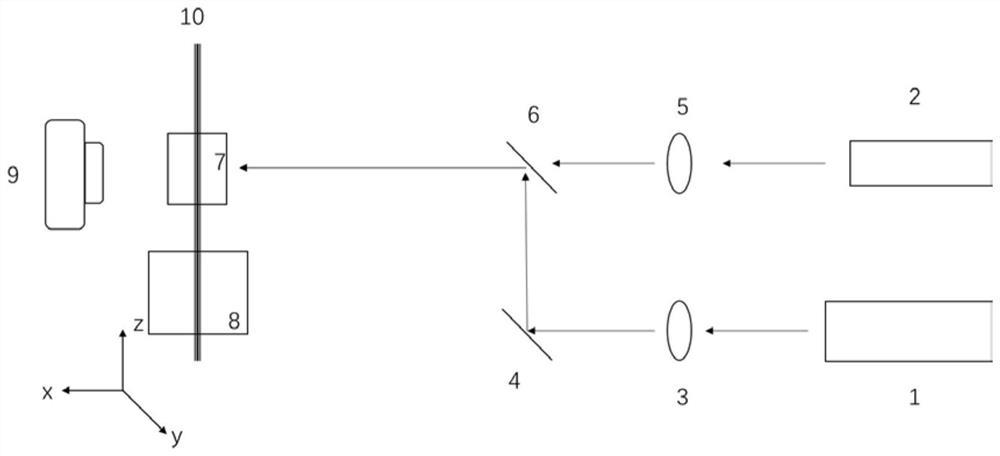
附图为本专利的结构图:图1是本专利结构图,图2是本专利整体布局图,图3是云台结构图,其中分别为,1.光纤激光输出臂,2.云台,3.飞行器本体,4.旋翼,5.旋翼电机,6.连杆,7.激光扫描头,8.光纤与电缆束,9.光纤与电缆束万向连接器,10.光纤激光器,11.移动车车体,12.万向脚轮,13.控制器,14.小车手柄,15.电塔架,16.绝缘子,17.高压线, 18.俯仰平板,19.螺纹孔,20.俯仰摆板,21.键,22.轴孔,23.俯仰电机轴,24.俯仰电机支撑块,25.水平转动台,26.底座,27.俯仰电机,28.摄像机。
五、具体实施方式:
一种四旋翼无人机式激光清洗装置,本实用新型的具体实施方式为:
设置激光除锈车的车体,它由移动车车体11、万向脚轮12和车体板上部的光纤激光器 10、以及控制器13等组成,车轮选用的是可以使车可以沿任意方向行驶的四个万向脚轮12 构成,万向脚轮12、车体板上部的光纤激光器10、以及控制器13都是通过支撑板实现与移动车车体11固结在一起的。在移动车车体上设置光纤激光器10和控制器13,然后将从控制器引出的信号线接到光纤激光器10上,在光纤激光器上安置光纤与电缆束万向连接器9,连接器上安装光纤和电缆束8,通过光纤与电缆束连接激光输出臂1,控制器经有线传输给光纤激光器上,信号再输入到光纤激光输出臂,从而使激光输出臂按照规定方向运动。设置了由云台2和摄像头28组成的实时监控装置,通过无线传输把实时画面传回控制台,从而达到高效率的工作。云台2采用螺纹孔19,俯仰摆板20,键21,轴孔22,俯仰电机轴23,俯仰电机支撑块24,水平转动台25,底座26,俯仰电机27构成,从控制器13引线连接到光纤激光输出臂1和云台2上,控制器通过控制线发送信号来控制光纤激光输出臂1和云台2。云台2的水平转动台25采用三百六十度舵机,俯仰电机27采用一百八十度舵机。激光除锈装置由光纤激光输出臂1、云台2、激光扫描头7、光纤激光器10、光纤与电缆束8、光纤与电缆束万向连接器9组成。云台的水平转动台采用三百六十度舵机,俯仰电机采用一百八十度舵机,形成锈蚀工作面周围立体三维激光除锈清洗空间。设置实时监控清洗的监控系统,可以通过监控系统实时对工作面进行观察,进而对遗漏或清洗不干净处实现再次清洗,通过调整云台上的水平转动台和俯仰电机来实现全方位清洗工作。
工作过程:在工作过程中,只需操控遥控器,通过按下相应的按钮使遥控器发出相应的指令信号,车载控制器13接收到信号后通过信号线传递给光纤激光器10,进而在传递给光纤输出臂1,输出臂1就会按照指令信号输出激光,同时摄像头28会将采集到的视频信号经控制器13传回遥控器的屏幕上,当无人机到达工作位置后,工作人员按下激光除锈设备启动按钮,控制器13接收到此信号后立即通过信号线发送一个脉冲信号,使光纤激光器10和光纤激光输出臂1电路接通,开始发出激光进行工作。工作人员也能通过监控系统实时对工作面进行观察,进而有遗漏或清洗不干净实现再次清洗。在工作的过程中,工作人员可以不断的通过遥控器控制摄像头28和云台2上水平转动台25和俯仰电机18,来切换视角和调整激光扫描头7的工作范围,以便更加高效完成清洗工作。
一种四旋翼无人机式激光清洗装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0