

IPC分类号 : B62D5/04,B60K17/04,B60G3/20,B60G7/00,B62D9/00,B62D6/00,B62D113/00,B62D101/00,B62D137/00







专利摘要
本实用新型公开了一种用于四轮独立驱动与转向的电动汽车模块化车轮总成,包括车架;转向电机,其固定在所述车架上;以及副车架,其形成容纳空间;所述副车架可旋转的支撑在所述车架上;所述转向电机的输出轴连接所述副车架,所述副车架能够绕输出轴转动;驱动电机,其固定在所述容纳空间内,用于驱动车轮旋转;立柱,轮毂可旋转的支撑在所述立柱上;所述立柱具有通孔,所述驱动电机的输出轴穿过所述通孔驱动车轮;上悬架摆臂,其两端通过橡胶衬垫连接在所述容纳空间的上端和所述立柱之间;下悬架摆臂,其两端通过橡胶衬垫连接在所述容纳空间的下端和所述立柱之间。本实用新型的车轮总成集成驱动、制动、悬架和转向系统,实现四轮独立驱动与转向。
权利要求
1.一种独立驱动与转向的汽车模块化车轮总成,其特征在于,包括:
车架;
转向电机,其固定在所述车架上;以及
副车架,其形成容纳空间;所述副车架可旋转的支撑在所述车架上;所述转向电机的输出轴连接所述副车架,所述副车架能够绕输出轴转动;其中,所述容纳空间的上端具有向上延伸的凸起支架;
驱动电机,其固定在所述容纳空间内,用于驱动车轮旋转;
立柱,轮毂可旋转的支撑在所述立柱上;所述立柱具有通孔,所述驱动电机的输出轴穿过所述通孔驱动车轮;
上悬架摆臂,其两端通过橡胶衬垫连接在所述容纳空间的上端和所述立柱之间;
下悬架摆臂,其两端通过橡胶衬垫连接在所述容纳空间的下端和所述立柱之间。
2.如权利要求1所述的独立驱动与转向的汽车模块化车轮总成,其特征在于,所述车轮总成还包括:弹簧减振器总成,其两端分别支撑在所述凸起支架和所述悬架上摆臂之间。
3.如权利要求1所述的独立驱动与转向的汽车模块化车轮总成,其特征在于,还包括:弹簧减振器总成,其两端分别支撑在所述容纳空间上端和所述悬架下摆臂之间。
4.如权利要求2或3所述的独立驱动与转向的汽车模块化车轮总成,其特征在于,还包括:
制动盘,其固定连接轮毂;
制动钳,其固定在所述立柱上,能够在制动时夹紧制动盘。
5.如权利要求4所述的独立驱动与转向的汽车模块化车轮总成,其特征在于,所述转向电机的输出轴竖直向下;所述副车架的底部通过转轴可旋转支撑在所述车架上,所述转轴和所述转向电机的输出轴同轴。
6.如权利要求5所述的独立驱动与转向的汽车模块化车轮总成,其特征 在于,所述驱动电机的输出轴旋转连接内球笼,内球笼通过半轴连接轮毂。
7.如权利要求6所述的独立驱动与转向的汽车模块化车轮总成,其特征在于,还包括上法兰盘和下法兰盘,所述转向电机通过上法兰盘和下法兰盘固定在车架上。
8.如权利要求7所述的独立驱动与转向的汽车模块化车轮总成,其特征在于,还包括副转向轴,其与所述转向电机的输出轴对称安装在副车架上下两侧,所述副转向轴与转向电机输出轴同步转动。
说明书
技术领域
本实用新型属于汽车领域,具体涉及四轮独立驱动与转向电动汽车驱动、制动、悬架和转向模块化车轮总成结构。
背景技术
以电动汽车为代表的汽车电气化技术已经成为了当今世界汽车技术研发的焦点之一,由于分布式驱动电动汽车相对于传统汽车在稳定性、主动安全及节能等方面具有显著控制优势必将成为新一代电动汽车的重要发展方向。四轮独立驱动与转向电动汽车作为分布式驱动电动汽车的一种,除了四个驱动电机驱动汽车外,四个转向电机控制四个车轮转角,四轮驱动或制动转矩、四轮转角独立可控,相对于传统底盘分布式驱动电动汽车系统响应更快,不仅具有更多可控自由度,而且控制更为精准,已成为新一代电动汽车的代表。目前国内外四轮独立驱动与独立转向电动汽车主要采用四轮轮毂电机驱动,而采用轮毂电机驱动有如下缺点:1.由于轮毂电机安装在车轮内部,使制动系统、悬架系统不容易布置;2.轮毂电机增加了汽车非簧载质量,使车辆的平顺性和操控性变差;3.现有轮毂电机功率和转矩相对较小,汽车动力性较差。
实用新型内容
本实用新型的一个目的是提供一种采用轮边驱动的车轮总成,将悬架、转向、驱动和制动集成为一体结构,使驱动电机的重量由悬架来承载提高汽车行驶平顺性和操纵性,并进一步提高了汽车动力性。
为了实现根据本实用新型的这些目的和其它优点,提供了一种用于四轮独立驱动与转向的电动汽车模块化车轮总成,包括:
车架;
转向电机,其固定在所述车架上;以及
副车架,其形成容纳空间;所述副车架可旋转的支撑在所述车架上;所述转向电机的输出轴连接所述副车架,所述副车架能够绕输出轴转动;其中,所述容纳空间的上端具有向上延伸的凸起支架;
驱动电机,其固定在所述容纳空间内,用于驱动车轮旋转;
立柱,轮毂可旋转的支撑在所述立柱上;所述立柱具有通孔,所述驱动电机的输出轴穿过所述通孔驱动车轮;
上悬架摆臂,其两端通过橡胶衬垫连接在所述容纳空间的上端和所述立柱之间;
下悬架摆臂,其两端通过橡胶衬垫连接在所述容纳空间的下端和所述立柱之间。
优选的是,所述车轮总成还包括:弹簧减振器总成,其两端分别支撑在所述凸起支架和所述悬架上摆臂之间。
优选的是,还包括:弹簧减振器总成,其两端分别支撑在所述容纳空间上端和所述悬架下摆臂之间。
优选的是,还包括:
制动盘,其固定连接轮毂;
制动钳,其固定在所述立柱上,能够在制动时夹紧制动盘。
优选的是,所述转向电机的输出轴竖直向下;所述副车架的底部通过转轴可旋转支撑在所述车架上,所述转轴和所述转向电机的输出轴同轴。
优选的是,所述驱动电机的输出轴旋转连接内球笼,内球笼通过半轴连接轮毂。
优选的是,还包括上法兰盘和下法兰盘,所述转向电机通过上法兰盘和下法兰盘固定在车架上。
优选的是,还包括副转向轴,其与所述转向电机的输出轴对称安装在副车架上下两侧,所述副转向轴与转向电机输出轴同步转动。
本实用新型至少包括以下有益效果:本实用新型把驱动、制动、悬架和转向系统在每个车轮进行集成,形成了模块化车轮总成结构,轮边驱动电机的重量通过支撑在车架上的转向架来承载,把驱动电机的重量转化成为了簧上质量。车架加上四个模块化车轮总成就构成了四轮独立驱动与转向电动车底盘架构。本实用新型减小了汽车簧下质量,提高汽车行驶平顺性和操纵性,提高了汽车动力性。
本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
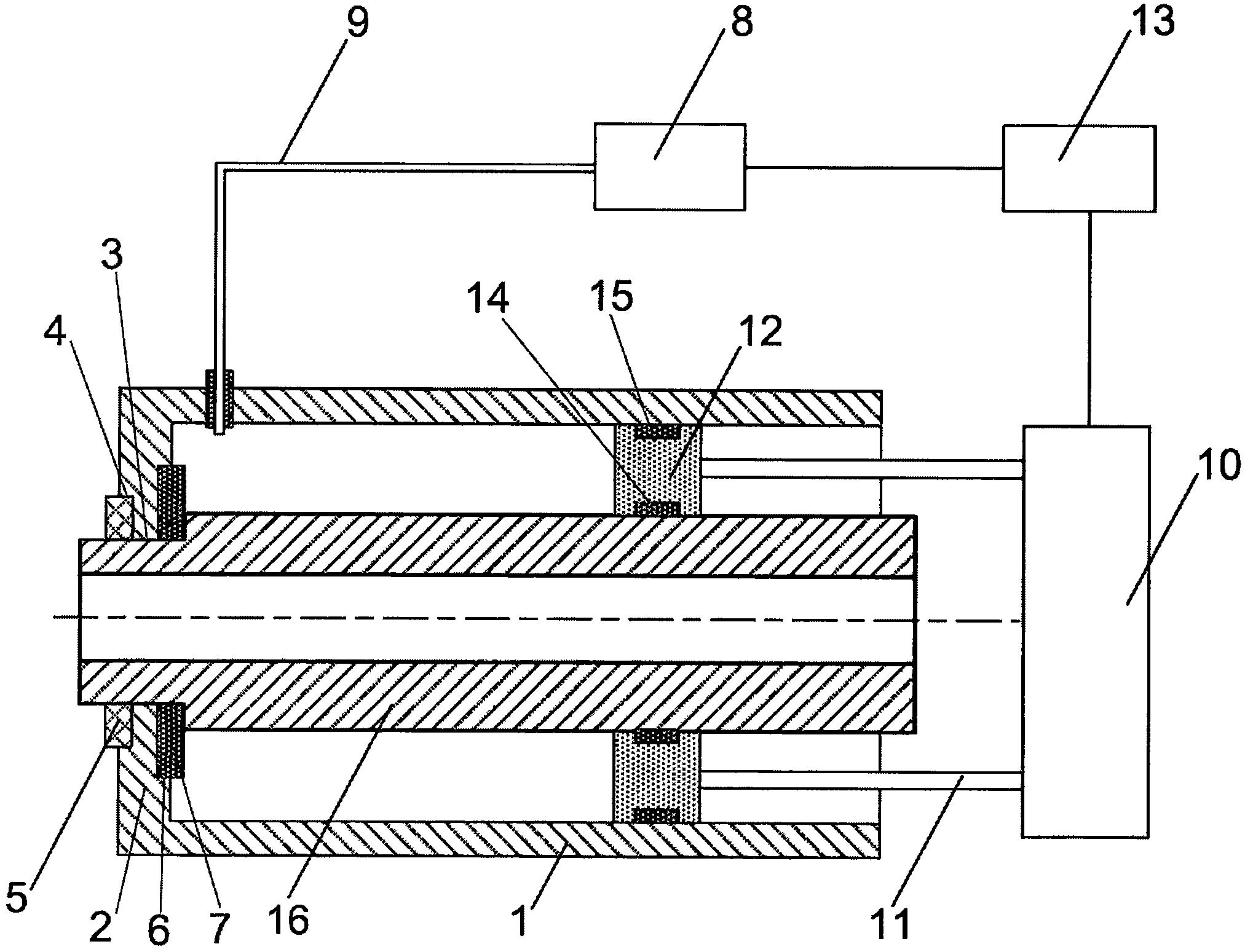
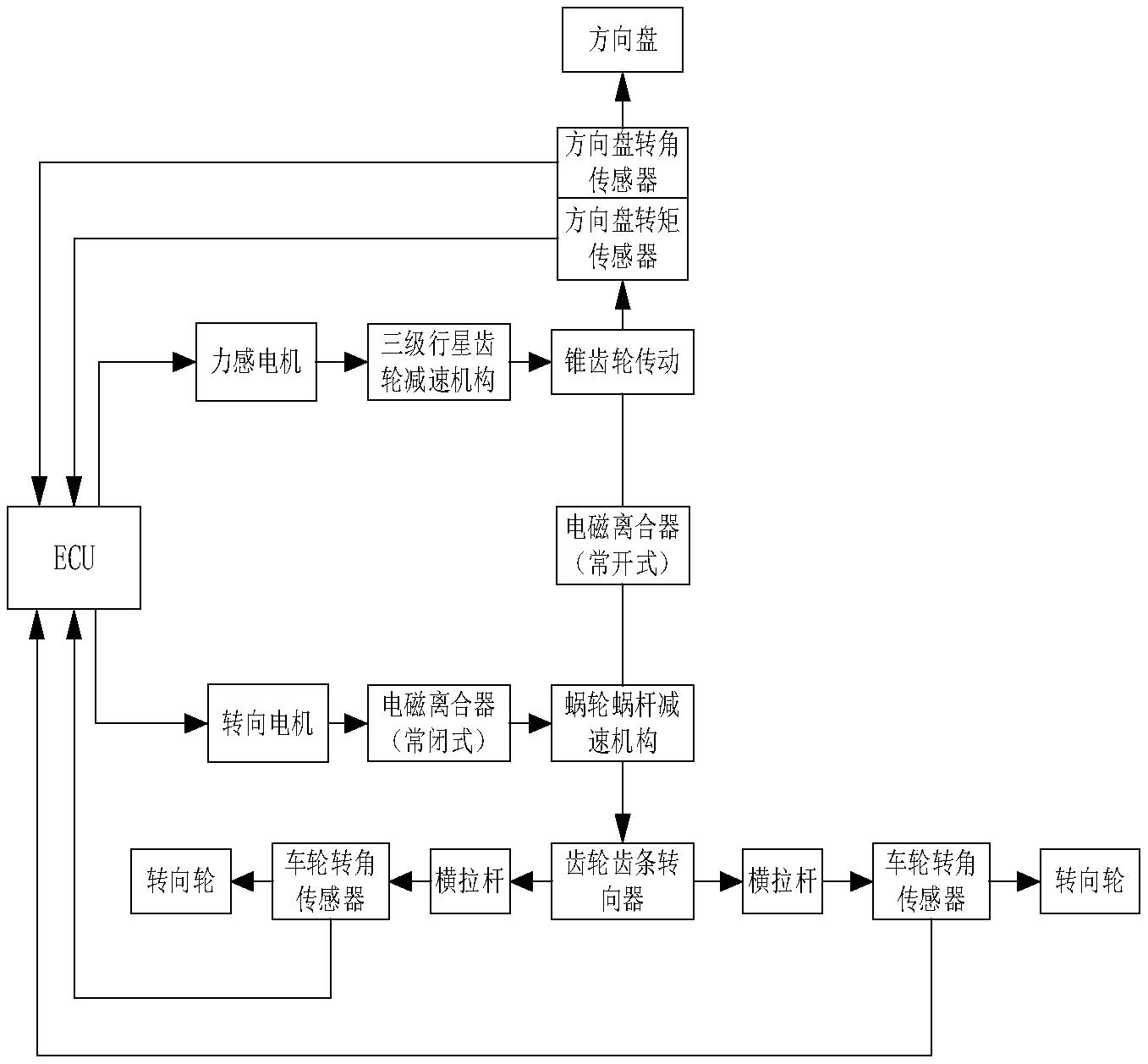
图1是本实用新型电动汽车与车轮总成的一种实现方式的结构原理图。
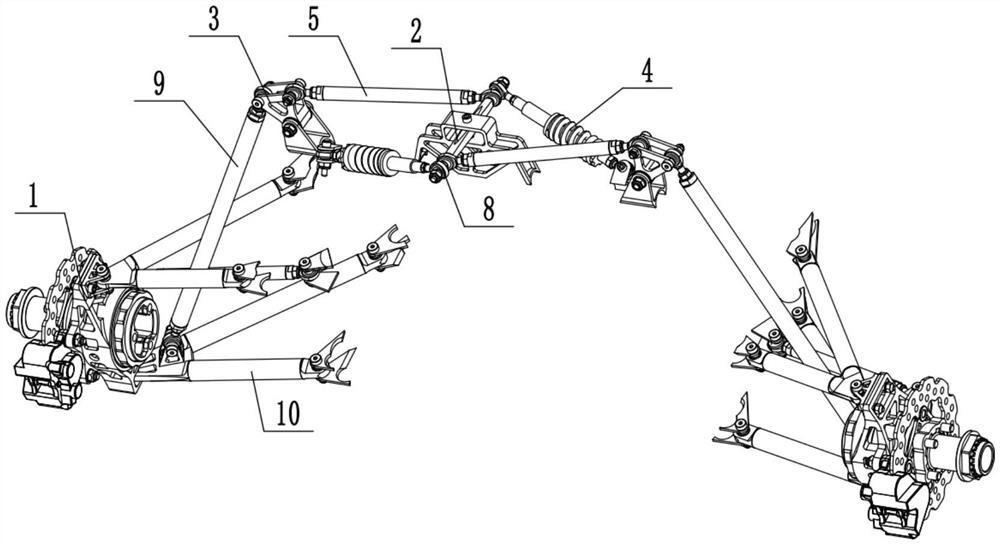
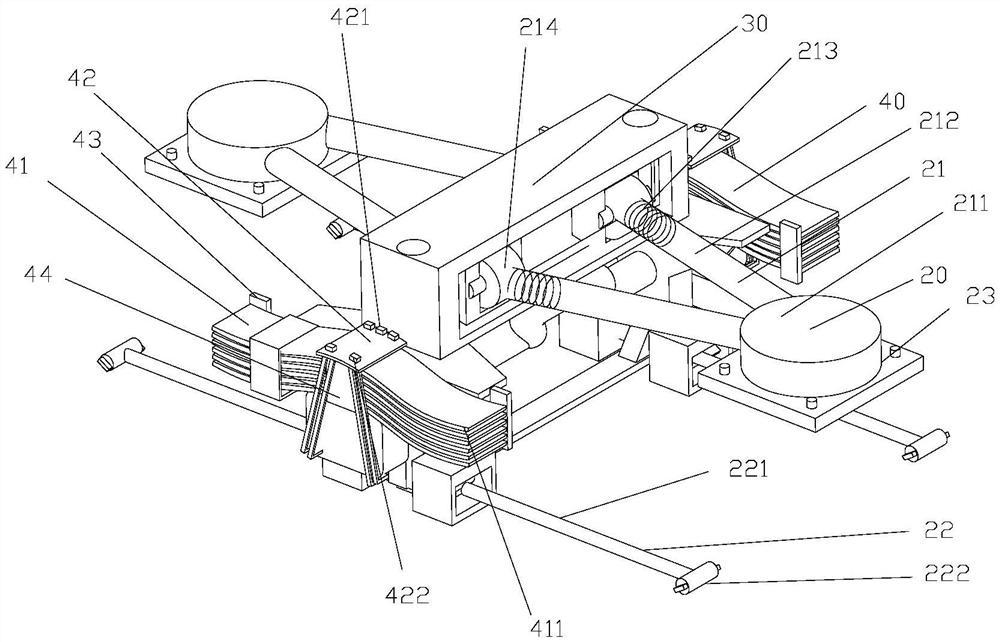
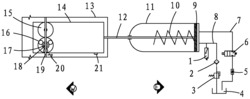
图2是本实用新型车轮总成的另一实现方式的结构图。
图3是本实用新型车轮总成的另一实现方式的主视图。
图4是本实用新型四轮独立驱动与转向电动汽车的整车结构图。
图5是本实用新型四轮独立驱动与转向电动汽车的前轮转向模式图。
图6是本实用新型四轮独立驱动与转向电动汽车的后轮转向模式图。
图7是本实用新型四轮独立驱动与转向电动汽车的四轮转向模式图。
图8是本实用新型四轮独立驱动与转向电动汽车的斜行模式图。
图9是本实用新型四轮独立驱动与转向电动汽车的横行模式图。
图10是本实用新型四轮独立驱动与转向电动汽车的原地转向模式图。
具体实施方式
下面结合附图对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不配出一个或多个其它元件或其组合的存在或添加。
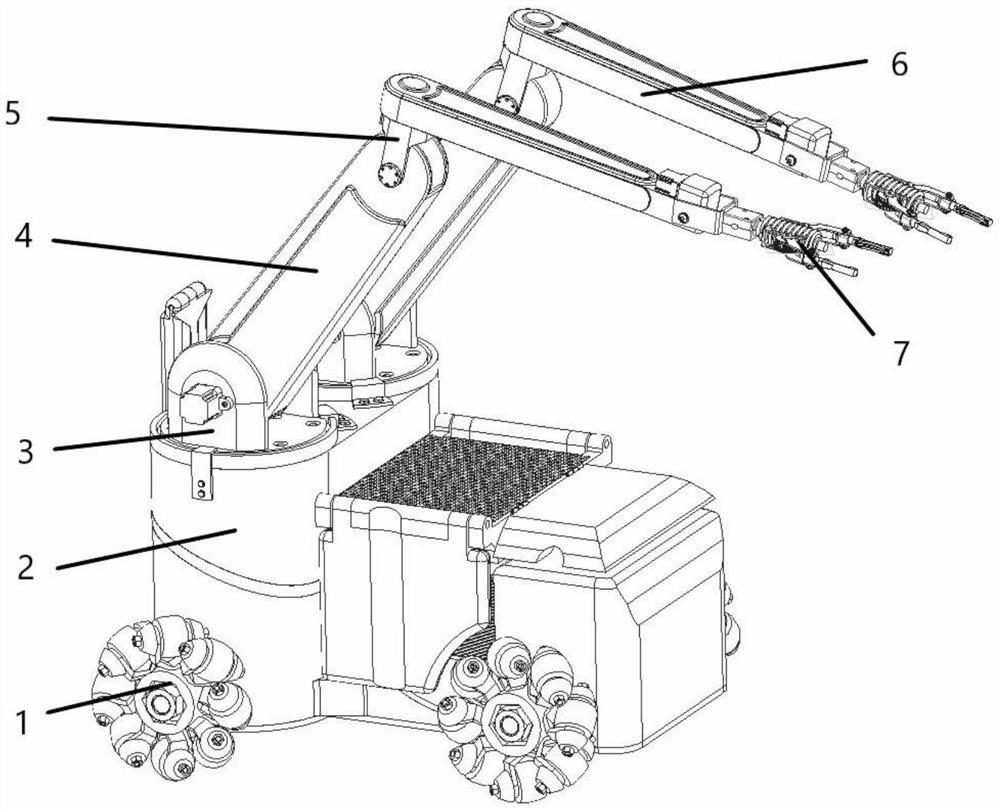
图1示出了根据本实用新型的四轮独立驱动与转向电动汽车与其模块化车轮总成的一种实现方式,包括车架100、车轮总成200、控制器。车架100为金属合金材质,具有一定的抗压和抗撞击而变形的能力。其前后分别对称设置4个车轮总成200,所述车轮总成200带动车架100运动。车轮总成200包括副车架210、驱动电机220、转向电机230、制动盘240、车轮250、减震器总成260、上悬架摆臂270、下悬架摆臂280和立柱290。
副车架210为长方体框架结构,其通过两个轴承安装支承在车架100上,可承受一定的轴向和径向载荷,所述副车架210内部中空形成容纳空间,所述容纳空间用于放置并固定驱动电机220,带动驱动电机220与副车架210同步运动。副车架210上面设置有凸起支架211,所述凸起支架211固定连接转向电机230的输出轴231,所述副车架210下面固定连接转向电机220的副转向轴232,所述转向电机230驱动副车架210绕其旋转0-180度,从而带动驱动电机与副车架210同步运动。
驱动电机220包括输出轴221、内球笼222、半轴223,驱动电机220通过螺栓连接在副车架210的容纳空间中,驱动电机的输出轴221穿过立柱290的中心通孔,通过花键配合内球笼222,半轴223悬浮安装在内球笼222和轮毂252之间,使车轮250可相对于驱动电机220上下小角度的晃动。驱动电机220驱动车轮250绕其中心进行旋转,起到带动车轮总成200前进,从而带动车架100前进,实现整车前行的作用。
转向电机230包括输出轴231、副转向轴232、上法兰盘233、下法兰盘234,转向电机230的上半部分通过上法兰盘233钢性连接在车架100上,转向电机230的下半部分通过下法兰盘234固定在副车架210上,进一步的是,转向电机输出轴231固定在副车架210的凸起支架211上,副转向轴232固定在副车架210下面,所述副转向轴232安装位置与输出轴131的位置相对应,分别设置在输出驱动电机输出轴221的上下两侧,副转向轴232另一端通过轴承连接车架100于点K,使所述副转向轴232与转向电机输出轴231同步运动。总之,转向电机230固定在车架100上,其输出轴231和副转向轴232带动副车架210绕其旋转0-180度,实现车轮总成200的转向。
制动盘240包括卡钳241,所述制动盘240设置在轮辋251的容纳空间内,与轮毂252平行并通过四颗螺栓连接在一起;其中,所述制动盘240的卡钳241固定在立柱290上。所述制动盘240对车轮总成200起到制动作用。
车轮250包括轮辋251、轮毂252,轮胎套设在轮辋251外周上,轮辋251和轮毂252通过四颗螺栓连接在一起,轮毂252和立柱290通过两个轴承过盈安装。减震器总成260其通过球铰E连接在副车架210的凸起支架211,另一端通过球铰C铰接在下悬架摆臂280上。
悬架系统包括:上悬架摆臂270、下悬架摆臂280、立柱290,其具有将副车架210、车轮250和减震器总成260集成为一体的作用。上悬架摆臂270为三角形框架结构,其顶点通过球铰A安装在立柱290上,另两个端点通过球铰J安装在凸起支架211两侧;下悬架摆臂280为梯形框架结构,梯形框架结构的上底边的两端点通过球铰H固定在所述副车架210下面两端,梯形框架结构下底边通过球铰B固定在立柱上;立柱290具有通孔,通过轴承连接轮毂252。上悬架摆臂270、下悬架摆臂280、立柱290组成的ABHJ四连杆传动转向机构,其功能具体为,驱动电机220的输出轴221穿过立柱290的通孔,驱动车轮250转动;当转向电机230驱动副车架210旋转一定角度,副车架210通过ABHJ四连杆传动转向机构带动车轮250偏转,从而实现车架100转向。
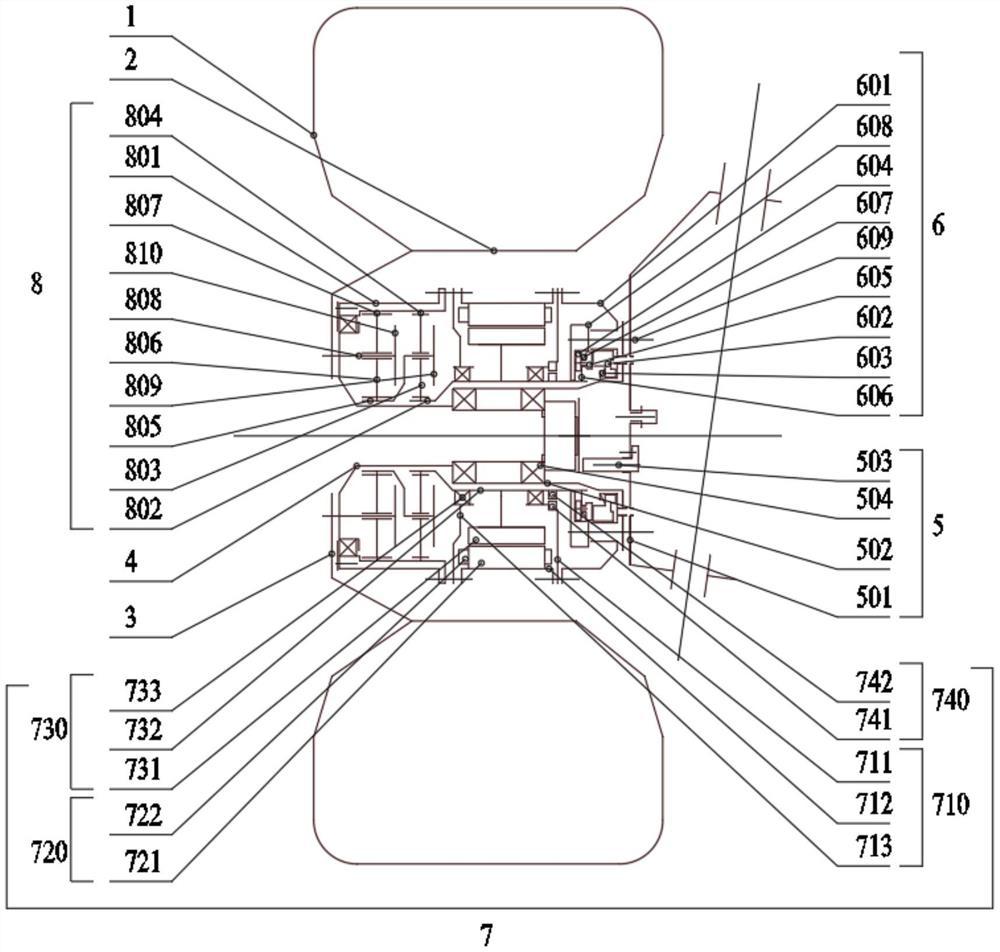
如图2和3示出了车轮总成300的另一种实现形式,车轮总成300包括副车架310、驱动电机320、转向电机330、制动盘、车轮350、减震器总成360、上悬架摆臂370、下悬架摆臂380和立柱390。所述副车架310其内容纳空间用于放置和固定驱动电机320,带动驱动电机320与其同步运动即同步转向。驱动电机320的输出轴穿出副车架310、通过立柱390的通孔后旋转连接车轮350的轮毂。转向电机330主体固定在车架100上,其输出轴和副转向轴与副车架310的上下面凸起支架固定连接,其带动副车架310转动0-180度。制动盘安装在车轮350内,对车轮总成300起到制动作用。车轮350包括轮胎、轮辋和轮毂,轮毂与立柱390通过轴承连接,电机输出轴穿过立柱390后旋转连接车轮350的轮毂,使车轮350旋转,驱动车轮350旋转从而带动车轮总成300前进。减震器总成360上端通过球铰与副车架310上端的凸起支架铰接,其下端通过球铰铰接下悬架摆臂380,详见图2和3,两个减震器共同作用减轻车轮总成300的震动。上悬架摆臂370两端分别铰接在副车架310上面和立柱390上面,下悬架摆臂380两端分别铰接副车架310下面和立柱390下面,所述上悬架摆臂370、下悬架摆臂380和立柱390铰接构成连杆转向机构,当转向电机330驱动副车架310转动时,副车架310通过四连杆机构带动车轮350转动,实现车架100的转向。由于副车架310不进行跳动而上悬架摆臂370、下悬架摆臂380进行跳动,所以此时只能通过减震器总成360进行压缩弹簧来吸收路面传来的冲击载荷。
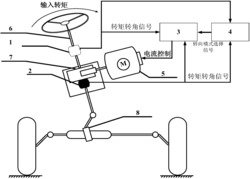
图4-10示出了本实用新型所述的安装车轮总成200或300的电动车,其上对称布设四个车轮总成,实现四个车轮的独立转向和驱动。当进行转向时,角位移传感器采集方向盘转角信息,经控制器进行处理后,使转向电机转过一定角度,带动转向架、驱动电机、传动系统、悬架系统、制动系统、车轮一起转动,四个转向电机同时转动,实现了四个车轮的独立转向。其具有多种转向行驶模式,包括前轮转向模式、后轮转向模式、四轮转向模式、斜行模式、横行模式和原地转向模式。
如图5所示,电动车进行转向时,角位移传感器采集方向盘转角信息,经控制器进行处理后,控制器对两前轮发出转向信号,控制后轮不旋转,前轮转向电机检测方向的转向信号,根据转向信号转向电机分别驱动前轮转动,进一步的是,转向电机驱动前面两轮旋转不同角度,使前轮和后轮符合阿克曼定理,两前轮带动电动车绕圆心旋转实现前轮转向模式。
如图6所示,电动车进行转向时,角位移传感器采集方向盘转角信息,经控制器进行处理后,控制器对两后轮发出转向信号,控制前轮不旋转,后轮转向电机检测方向的转向信号,转向电机分别驱动后轮转动,进一步的是,转向电机驱动后面两轮旋转不同角度,使前轮和后轮符合阿克曼定理,两后轮带动电动车绕圆心旋转实现后轮转向模式。
如图7所示,电动车进行转向时,角位移传感器采集方向盘转角信息,经控制器进行处理后,控制器分别对前、后轮发出转向信号,使前轮和后轮的偏转方向相反,前轮转向电机检测方向的转向信号,其转向电机驱动前面两轮旋转不同角度;后轮转向电机检测方向的转向信号,其转向电机驱动后面两轮旋转不同角度,进一步的是,使前轮和后轮符合阿克曼定理,前、后轮带动电动车绕圆心旋转实现四轮转向模式。
如图8所示,电动车进行斜行时,角位移传感器采集方向盘转角信息,经控制器进行处理后,控制器分别对前、后轮发出相同转向信号,使前轮和后轮的偏转方向和偏转角度相同,前轮转向电机检测方向的转向信号,其转向电机驱动前面两轮旋转相同角度和方向;后轮转向电机检测方向的转向信号,其转向电机驱动后面两轮旋转相同角度和方向,实现斜行模式。
如图9所示,电动车进行横行时,角位移传感器采集方向盘转角信息,经控制器进行处理后,控制器分别对前、后轮发出相同转向信号,使前轮和后轮的偏转方向和偏转角度相同,前轮转向电机检测方向的转向信号,其转向电机驱动前面两轮旋转90度;后轮转向电机检测方向的转向信号,其转向电机驱动后面两轮旋转90度,实现横行模式。
如图10所示,电动车进行原地转向时,角位移传感器采集方向盘转角信息,经控制器进行处理后,控制器分别对四个车轮发出不同转向信号,使左前轮和右后轮的偏转方向相同,右前轮和左后轮的偏转方向相同。具体的动作为:两前轮转向电机检测方向的转向信号,其转向电机分别驱动前面两轮旋转不同角度;两后轮转向电机检测方向的转向信号,驱动后面两轮旋转不同角度,进一步的是,使前轮和后轮符合阿克曼定理,前、后轮带动电动车绕圆心旋转实现原地转向模式。
尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本实用新型的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
一种独立驱动与转向的汽车模块化车轮总成专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0