









专利摘要
本发明公开了一种基于单路显微视觉的多微小零件共面调整工作平台及相应的方法。所述平台包括:运动平台A、运动平台B、显微视觉系统、夹持器基座、俯仰平台、夹持器、微零件和计算机。所述方法包括以下步骤:首先将显微视觉系统调整至最大视野,并调整各微小零件移入视野,使各零件在图像上清晰成像;然后对图像做出处理,得到各个零件在图像中的位置,计算得到使各个零件移动至视野中心夹持器所需的运动量;最后将某一个微小零件移至视野中心,将视觉系统调整至最小视野对该零件精确对焦;然后将各个零件依次移动至视野中心,使得各个微小零件均在视觉系统下得到清晰图像。本发明达到了微米量级的共面调整精度,且简单易行、执行效率高。
权利要求
1.一种基于显微视觉景深的多微小零件共面调整工作平台,其特征在于,该平台包括:运动平台A、运动平台B、显微视觉系统、夹持器基座、俯仰平台、夹持器、固定在夹持器夹持端的微零件以及计算机,其中:
所述运动平台A具有垂直方向的1个平移自由度,固定在隔振平台上;
所述显微视觉系统包括CCD摄像机和显微镜头,所述CCD摄像机固定在所述运动平台A上;所述显微镜头安装在所述CCD摄像机上;
所述运动平台B具有3个平移自由度,固定在隔振平台上;所述夹持器基座安装在所述运动平台B上,并位于所述显微镜头的正下方;所述俯仰平台固定在所述夹持器基座上;所述夹持器固定在所述俯仰平台上;所述微零件固定在所述夹持器的夹持端上;
所述计算机与所述CCD摄像机连接,用于从所述CCD摄像机中读取图像;
所述平台工作时,通过移动运动平台A对基准微零件聚焦,通过移动运动平台B将各个微零件依次运动到显微镜头下,通过调整俯仰平台对运动到显微镜头下的微零件进行聚焦。
2.根据权利要求1所述的平台,其特征在于,所述俯仰平台和夹持器的数目取决于需要共面调整的微零件的数目。
3.一种基于权利要求1所述的平台基于显微视觉景深对多微小零件进行共面调整的方法,其特征在于,该方法包括以下步骤:
步骤S1:将各个微小零件安装到相应夹持器的夹持端上,移动运动平台B,使得所有微小零件均位于显微视觉系统的视野范围内;
步骤S2:调整各个微小零件所在夹持端的俯仰角自由度,使得各个微小零件处于一个平面内;
步骤S3:将显微视觉系统调整到最大视野,对所述微小零件进行聚焦,获得所述微小零件的清晰图像;
步骤S4:调整未获得清晰图像的微小零件所在夹持器的夹持端的俯仰角自由度,使得所有微小零件均清晰成像,在大视野下可以看到所有的微小零件。
4.根据权利要求3所述的方法,其特征在于,如果对于所述微小零件的调整还不满足装配要求,则所述方法还包括以下步骤:
步骤S5:通过清晰成像的微小零件图像获取各个微小零件在图像中的位置,并计算得到将各个微小零件运动到显微视觉系统的视野中心所需要的运动平台B的运动量;
步骤S6:将显微视觉系统调整到最大放大倍率;
步骤S7:通过移动运动平台A使得所述显微视觉系统对某一个微小零件对焦,获得清晰图像;
步骤S8:所述显微视觉系统保持固定不动,依次将各个微小零件运动到显微视觉系统的视野中心,通过调整各微小零件所在夹持端的俯仰角自由度,使各个微小零件分别清晰聚焦。
5.根据权利要求3所述的方法,其特征在于,所述步骤S6还包括增加曝光时间作为曝光补偿的步骤。
说明书
技术领域
本发明属于微装配技术领域中的显微视觉测量和控制,具体地说是一种基于显微视觉景深的多微小零件共面调整平台及方法。
背景技术
随着微机电系统的快速发展,装配流程趋于复杂化,常常涉及对多个微小零件在某二维平面内共面调整的问题。先进的多微小零件共面调整技术对于缩短微小型产品的生产周期,降低成本等方面具有重要意义,同时显微视觉在微装配中应用广泛。本发明基于纤维视觉系统的特殊性,利用了显微视觉系统小景深的特点,提出了一种全新的多零件共面调整平台及方法,实现了微米级的共面调整精度,能够满足微装配系统的要求。
发明内容
为了解决微装配过程中的多微小零件的共面调整问题,本发明的目的在于提供一种能够满足微小零件在二维平面内实现快速共面调整平台及方法。本发明利用了显微视觉景深小的特点,即小放大倍率大视野情况对应大景深,大放大倍率小视野情况对应小景深,但小视野下无法看到全部零件,因此本发明的调整方法分粗调和精调两步。
为实现上述目的,根据本发明的一方面,提供一种基于显微视觉景深的多微小零件共面调整工作平台,该平台包括:运动平台A、运动平台B、显微视觉系统、夹持器基座、俯仰平台、夹持器、固定在夹持器夹持端的微零件以及计算机,其中:
所述运动平台A具有垂直方向的1个平移自由度,固定在隔振平台上;
所述显微视觉系统包括CCD摄像机和显微镜头,所述CCD摄像机固定在所述运动平台A上;所述显微镜头安装在所述CCD摄像机上;
所述运动平台B具有3个平移自由度,固定在隔振平台上;所述夹持器基座安装在所述运动平台B上,并位于所述显微镜头的正下方;所述俯仰平台固定在所述夹持器基座上;所述夹持器固定在所述俯仰平台上;所述微零件固定在所述夹持器的夹持端上;
所述计算机与所述CCD摄像机连接,用于从所述CCD摄像机中读取图像;
所述平台工作时,通过移动运动平台A对基准微零件聚焦,通过移动运动平台B将各个微零件依次运动到显微镜头下,通过调整俯仰平台对运动到显微镜头下的微零件进行聚焦。
根据本发明的另一方面,还提供一种基于所述平台、基于显微视觉景深对多微小零件进行共面调整的方法,该方法包括以下步骤:
步骤S1:将各个微小零件安装到相应夹持器的夹持端上,移动运动平台B,使得所有微小零件均位于显微视觉系统的视野范围内;
步骤S2:调整各个微小零件所在夹持端的俯仰角自由度,使得各个微小零件处于一个平面内;
步骤S3:将显微视觉系统调整到最大视野,对所述微小零件进行聚焦,获得所述微小零件的清晰图像;
步骤S4:调整未获得清晰图像的微小零件所在夹持器的夹持端的俯仰角自由度,使得所有微小零件均清晰成像,在大视野下可以看到所有的微小零件。
本发明在粗调阶段合理的利用较大视野获得各个微小零件的位置,并实现初步调平;在精调阶段,通过移动夹持器所在运动平台依次将各个微小零件移动到视野内,然后通过调整各微小零件对应的夹持器的夹持端的俯仰角自由度实现对各个微小零件的精确对焦。通过上述步骤,可以快速自动地实现多微小零件的共面调整,并达到很高的调整精度,提高了操作效率。
本发明的有益效果是:1)实现了多微小零件在二维平面的自动共面调整;2)通过对工作平台的合理设计实现了对多微小零件的快速自动共面调整,并且达到微米量级的共面调整精度;3)方法简单易行、执行效率高。
附图说明
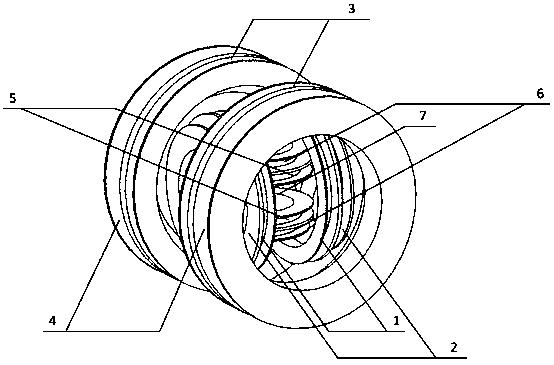
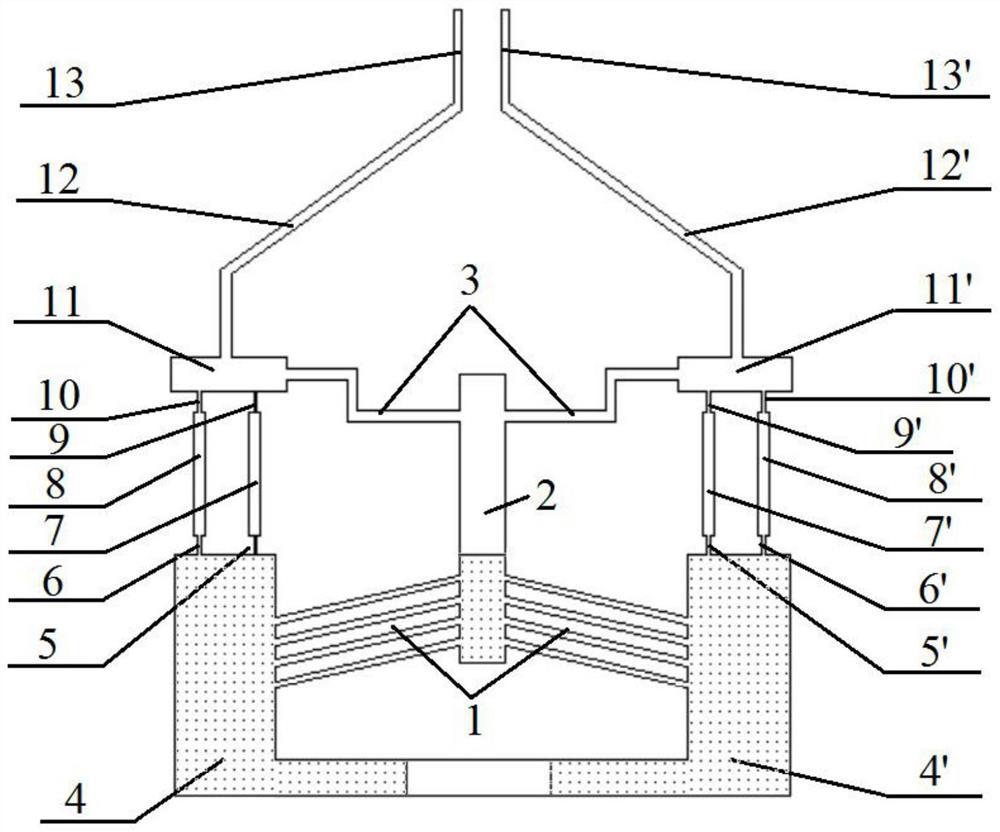
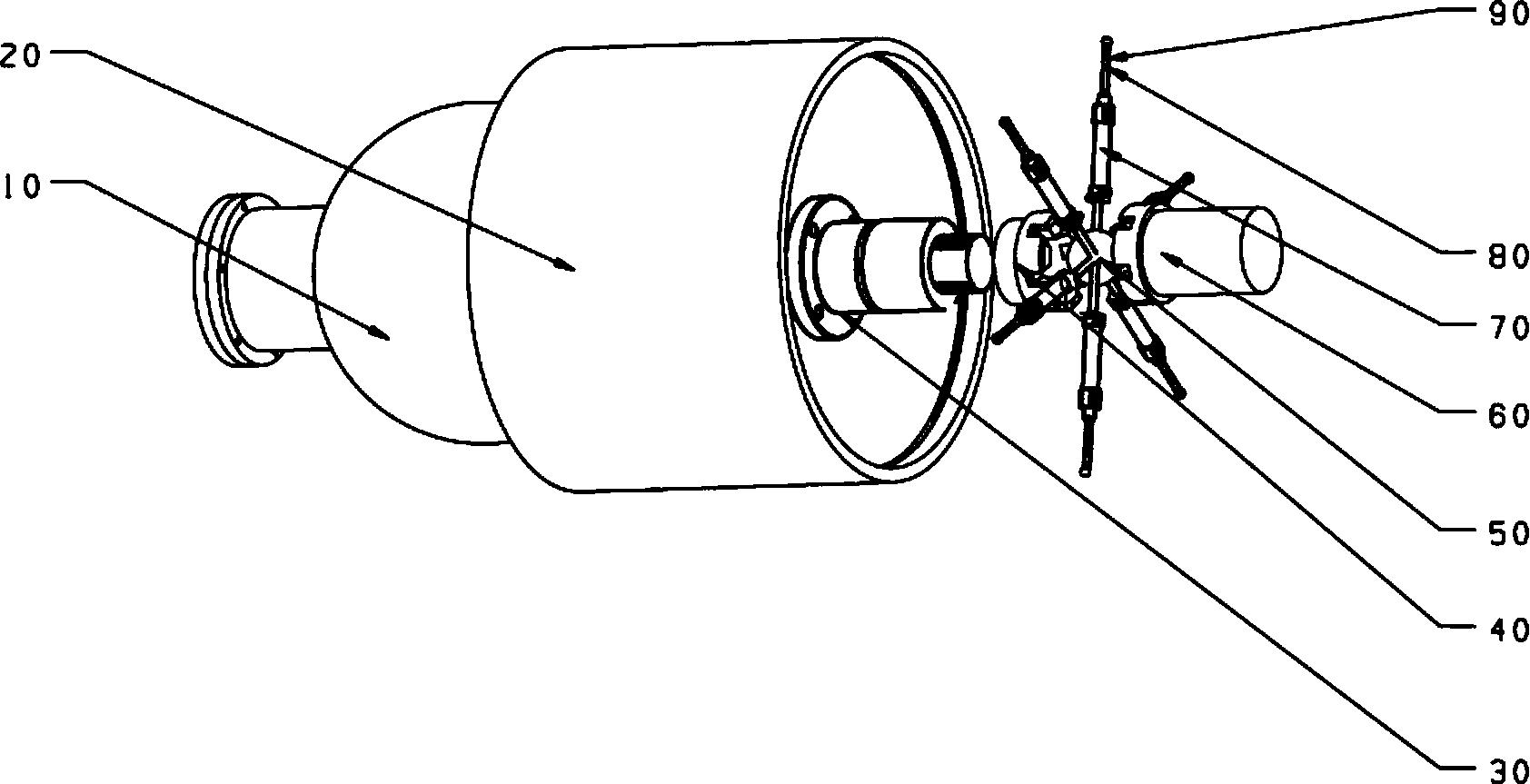
图1为本发明基于显微视觉景深的多微小零件共面调整工作平台结构示意图。
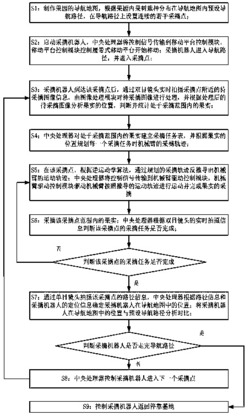
图2为本发明基于显微视觉景深的多微小零件共面调整方法的流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。
请参阅图1示出的本发明基于显微视觉景深的多微小零件共面调整工作平台结构示意图,如图1所示,所述工作平台包括:运动平台A、运动平台B、显微视觉系统、夹持器基座、俯仰平台、夹持器、固定在夹持器夹持端的微零件以及计算机,其中:
所述运动平台A具有垂直方向的1个平移自由度,固定在隔振平台上;
所述显微视觉系统包括CCD摄像机和显微镜头,所述CCD摄像机固定在所述运动平台A上;所述显微镜头安装在所述CCD摄像机上;
所述运动平台B具有3个平移自由度,固定在隔振平台上;所述夹持器基座安装在所述运动平台B上,并位于所述显微镜头的正下方;所述俯仰平台固定在所述夹持器基座上;所述夹持器固定在所述俯仰平台上;所述微零件固定在所述夹持器的夹持端上;其中,所述俯仰平台和夹持器的数目取决于需要共面调整的微零件的数目;
所述计算机与所述CCD摄像机连接,用于从所述CCD摄像机中读取图像。
基于上述平台,通过移动运动平台A、运动平台B以及俯仰平台都可以调整微零件到显微镜头之间的距离,直至在CCD摄像机中得到清晰聚焦的图像。
所述平台工作时,通过移动运动平台A对基准微零件聚焦,通过移动运动平台B将各个微零件依次运动到显微镜头下,通过调整俯仰平台对运动到显微镜头下的微零件进行聚焦。
请参阅图2示出的本发明基于所述工作平台的基于显微视觉景深的多微小零件共面调整方法的流程图,如图2所示,该方法包括以下步骤:
步骤S1:将各个微小零件安装到相应夹持器的夹持端上,移动运动平台B,使得所有微小零件均位于显微视觉系统的视野范围内;
步骤S2:调整各个微小零件所在夹持端的俯仰角自由度,使得各个微小零件处于一个平面内;
步骤S3:将显微视觉系统调整到最大视野,对所述微小零件进行聚焦,获得所述微小零件的清晰图像;
步骤S4:调整未获得清晰图像的微小零件所在夹持器的夹持端的俯仰角自由度,使得所有微小零件均清晰成像,在大视野下可以看到所有的微小零件;
步骤S5:通过清晰成像的微小零件图像获取各个微小零件在图像中的位置,并计算得到将各个微小零件运动到显微视觉系统的视野中心所需要的运动平台B的运动量;
步骤S6:将显微视觉系统调整到最大放大倍率,并适当增加曝光时间作为曝光补偿;
步骤S7:通过移动运动平台A使得所述显微视觉系统对某一个微小零件对焦,获得清晰图像;
步骤S8:所述显微视觉系统保持固定不动,依次将各个微小零件运动到显微视觉系统的视野中心,通过调整各微小零件所在夹持端的俯仰角自由度,使各个微小零件分别清晰聚焦,也就是说,此时在最大放大倍率下仅能看到该零件,其余零件不在视野内;
在实施中,步骤S1到步骤S4是粗调过程,通过步骤S1到步骤S4,各个微小零件的共面精度能限制在显微视觉系统的最大景深范围内,如果此时满足装配要求,则精调步骤可以省略;步骤S5到步骤S8是精调过程,由于显微视觉系统在小视野下无法看到全部的微小零件,因此需要提取各个微小零件在图像中的位置,以便于依次将各个微小零件移动到视野中心,通过精调过程就能够把共面调整的精度限制在视觉系统的最小景深范围内。
可见,本发明能够在显微视觉的引导下,快速而且有效地实现多微小零件的共面调整。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种基于显微视觉景深的多微小零件共面调整平台及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0