






专利摘要
本发明实施例公开了一种多视角检测的机器人,控制方法及装置;所述机器人包括:小车、多关节机械臂和摄像头;所述装置包括:获取装置,驱动装置,启动装置,采集装置和上传装置;本发明实施例示出的机器人,通过各个电机控制相应旋转轴的旋转运动,从而使多关节机械臂可以在空间内进行多个方向的伸展运动;通过整个机械臂在空间多个方向的移动带动终端摄像头在多个方向移动,使机器人可以观测到更多复杂角度部位的目标图像,在进行设备检修的过程中可以增加更多的视野范围。
权利要求
1.一种多视角检测的机器人,其特征在于,所述机器人包括:小车、多关节机械臂和摄像头;其中,
所述小车包括:主连接装置,第一电机和轮子;
所述主连接装置包括:主轴,竖直旋转轴和第二电机;
所述多关节机械臂包括:主臂,副臂和连接装置;
所述连接装置包括:第一主电机,主水平旋转轴,主关节,第二主电机和主竖直旋转轴;
所述摄像头包括:终端摄像头;
所述终端摄像头包括:第一终端电机,水平终端旋转轴,第二终端电机和竖直终端旋转轴和终端关节;
所述小车的底部的四个顶角处分别设置有所述轮子;所述第一电机和所述主轴分别设置于所述小车内,所述第一电机的旋转端与所述主轴的一端相连接;所述主轴的另一端与所述主臂的一端通过所述主竖直旋转轴相连接;所述主轴与所述主臂的连接处设置有所述第二电机,所述第二电机的转动端与所述主竖直旋转轴相连接;
所述主臂的另一端设置有所述第一主电机;所述第一主电机的转动端与所述主水平旋转轴的一端相连接;所述主水平旋转轴的另一端与所述主关节的一端相连接,所述主关节的另一端与所述副臂的一端通过所述主竖直旋转轴相连接;所述主关节与所述副臂的连接处设置有所述第二主电机,所述第二主电机的转动端与所述主竖直旋转轴相连接;
所述副臂的另一端设置有所述第一终端电机,所述第一终端电机的转动端与所述水平终端旋转轴的一端相连接;所述水平终端旋转轴的另一端与所述终端关节的一端相连接;所述终端关节的另一端与所述终端摄像头通过所述竖直终端旋转轴相连接;所述终端关节与所述终端摄像头的连接处设置有所述第二终端电机;所述第二终端电机的转动端与所述竖直终端旋转轴相连接。
2.根据权利要求1所述的一种多视角检测的机器人,其特征在于,所述多关节机械臂包括至少一条副臂。
3.根据权利要求1所述的一种多视角检测的机器人,其特征在于,所述主臂长35cm-40cm。
4.根据权利要求1所述的一种多视角检测的机器人,其特征在于,所述副臂长30cm-35cm。
5.根据权利要求1所述的一种多视角检测的机器人,其特征在于,所述小车的长小于或等于50cm,所述小车的宽小于或等于20cm。
6.根据权利要求1所述的一种多视角检测的机器人,其特征在于,所述摄像头还包括:前置摄像头和后置摄像头,所述前置摄像头设置于所述小车的一端,所述后置摄像头设置于所述小车的另一端。
7.根据权利要求1所述的一种多视角检测的机器人,其特征在于,所述摄像头设置有照明设备。
8.根据权利要求1-7任一项所述的一种多视角检测的机器人,其特征在于,所述轮子为万向轮。
9.一种多视角检测的机器人控制方法:其特征在于,所述方法包括:
获取运动指令;
驱动所述机器人运动,并发出一启动信号;
接收启动信号,启动摄像头;
采集图片;
上传所述图片。
10.一种多视角检测的机器人控制装置,其特征在于,所述控制装置包括:
获取装置,所述获取装置用于获取运动指令;
驱动装置,所述驱动装置用于驱动所述机器人运动,并发出一启动信号;
启动装置,所述启动装置用于接收启动信号,启动摄像头;
采集装置,所述采集装置用于采集图片;
上传装置,所述上传装置用于上传所述图片。
说明书
技术领域
本发明涉及有机械臂的微型机器人领域,特别涉及一种多视角检测的机器人,控制方法及装置。
背景技术
随着科学技术的飞速发展,人们安全意识越来越高,在电力设备行业出现了越来越多的GIS((Gas Insulated Switchgear,气体绝缘全封闭组合电器)设备。GIS设备自20世纪60年代以来,已广泛运行于世界各地。GIS设备由断路器、隔离开关、接地开关、互感器、避雷器、母线、连接件和出线终端等电器元件组成,这些设备或部件全部封闭在金属接地的外壳中,在其内部充有一定压力的SF6绝缘气体,故也称SF6全封闭组合电器。在GIS设备使用的过程中常伴随着SF6气体的泄漏、外部水分的渗入、导电杂质的存在、绝缘子老化等因素影响,都可能导致GIS设备的故障。
GIS设备发生故障的情况下,需要对故障进行定位及检修,传统对GIS设备进行定位及检修过的方法通常为,相关技术人员进入GIS设备内对各个电器元件进行故障的定位与检修。
传统对GIS设备内各个电器元件进行故障的定位与检修过程中,需要相关技人员通过摄像头对GIS设备中个电器元件进行图像采集,然后对采集的图像进行处理,对发生故障的电器元件进行定位。传统的人工检测方法根据相关技术人员的经验对部分电器元件进行采集图片,由于GIS设备环境错综复杂,一些检测视角是人工检测无法达到的,因此在检测过程中,常常遗漏一些电器元件,达不到所有故障电器元件的全方位检测。
发明内容
本发明的发明目的在于提供一种多视角检测的机器人,控制方法及装置,以解决现有GIS设备内各个电器元件进行故障的定位与检修过程中,不能对所有的故障电器元件的全方位检测的问题。
根据本发明的实施例一方面提供了一种多视角检测的机器人,所述机器人包括:小车、多关节机械臂和摄像头;其中,
所述小车包括:主连接装置,第一电机和轮子;
所述主连接装置包括:主轴,竖直旋转轴和第二电机;
所述多关节机械臂包括:主臂,副臂和连接装置;
所述连接装置包括:第一主电机,主水平旋转轴,主关节,第二主电机和主竖直旋转轴;
所述摄像头包括:终端摄像头;
所述终端摄像头包括:第一终端电机,水平终端旋转轴,第二终端电机和竖直终端旋转轴和终端关节;
所述小车的底部的四个顶角处分别设置有所述轮子;所述第一电机和所述主轴分别设置于所述小车内,所述第一电机的旋转端与所述主轴的一端相连接;所述主轴的另一端与所述主臂的一端通过所述主竖直旋转轴相连接;所述主轴与所述主臂的连接处设置有所述第二电机,所述第二电机的转动端与所述主竖直旋转轴相连接;
所述主臂的另一端设置有第一主电机;所述第一主电机的转动端与所述主水平旋转轴的一端相连接;所述主水平旋转轴的另一端与所述主关节的一端相连接,所述主关节的另一端与所述副臂的一端通过所述主竖直旋转轴相连接;所述主关节与所述副臂的连接处设置有所述第二主电机,所述第二主电机的转动端与所述主竖直旋转轴相连接;
所述副臂的另一端设置有所述第一终端电机,所述第一终端电机的转动端与所述水平终端旋转轴的一端相连接;所述水平终端旋转轴的另一端与所述终端关节的一端相连接;所述终端关节的另一端与所述终端摄像头通过所述竖直终端旋转轴相连接;所述终端关节与所述终端摄像头的连接处设置有所述第二终端电机;所述第二终端电机的转动端与所述竖直终端旋转轴相连接。
进一步,所述多关节机械臂包括至少一条副臂。
进一步,所述主臂长35cm-40cm。
进一步,所述副臂长30cm-35cm。
进一步,所述小车的长小于或等于50cm,所述小车的宽小于或等于20cm。
进一步,所述摄像头还包括:前置摄像头和后置摄像头,所述前置摄像头设置于所述小车的一端,所述后置摄像头设置于所述小车的另一端。
进一步,所述摄像头设置有照明设备。
进一步,所述轮子为万向轮。
本发明实施例第二方面示出一种多视角检测的机器人控制方法:所述方法包括:
获取运动指令;
驱动所述机器人运动,并发出一启动信号;
接收启动信号,启动摄像头;
采集图片;
上传所述图片。
本发明第三方面示出一种多视角检测的机器人控制装置,所述控制装置包括:
获取装置,所述获取装置用于获取运动指令;
驱动装置,所述驱动装置用于驱动所述机器人运动,并发出一启动信号;
启动装置,所述启动装置用于接收启动信号,启动摄像头;
采集装置,所述采集装置用于采集图片;
上传装置,所述上传装置用于上传所述图片。
由以上技术方案可知,本发明实施例示出一种多视角检测的机器人,控制方法及装置;所述机器人包括:小车、多关节机械臂和摄像头;其中,所述小车包括:主连接装置,第一电机和轮子;所述主连接装置包括:主轴,竖直旋转轴和第二电机;所述多关节机械臂包括:主臂,副臂和连接装置;所述连接装置包括:第一主电机,主水平旋转轴,主关节,第二主电机和主水平旋转轴;所述摄像头包括:终端摄像头;所述终端摄像头包括:第一终端电机,水平终端旋转轴,第二终端电机和竖直终端旋转轴和终端关节;所述小车的底部的四个顶角处分别设置有所述轮子;所述第一电机和所述主轴分别设置于所述小车内,所述第一电机的旋转端与所述主轴的一端相连接;所述主轴的另一端与所述主臂的一端通过所述主竖直旋转轴主竖直旋转轴214相连接;所述主轴与所述主臂的连接处设置有所述第二电机,所述第二电机的转动端与所述主竖直旋转轴主竖直旋转轴214相连接;所述主臂的另一端设置有第一主电机;所述第一主电机的转动端与所述主水平旋转轴的一端相连接;所述主水平旋转轴的另一端与所述主关节的一端相连接,所述主关节的另一端与所述副臂的一端通过所述主竖直旋转轴主竖直旋转轴214相连接;所述主关节与所述副臂的连接处设置有所述第二主电机,所述第二主电机的转动端与所述主竖直旋转轴主竖直旋转轴214相连接;所述副臂的另一端设置有所述第一终端电机,所述第一终端电机的转动端与所述水平终端旋转轴的一端相连接;所述水平终端旋转轴的另一端与所述终端关节的一端相连接;所述终端关节的另一端与所述终端摄像头通过所述竖直终端旋转轴相连接;所述终端关节与所述摄像头的连接处设置有所述第二终端电机;所述第二终端电机的转动端与所述竖直终端旋转轴相连接;本发明实施例示出的机器人,通过各个电机控制相应旋转轴的旋转运动,从而使多关节机械臂可以在空间内进行多个方向的伸展运动;通过整个机械臂在空间多个方向的移动摄像头,使机器人可以观测到更多复杂角度部位的目标图像,在进行设备检修的过程中可以增加更多的视野范围。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
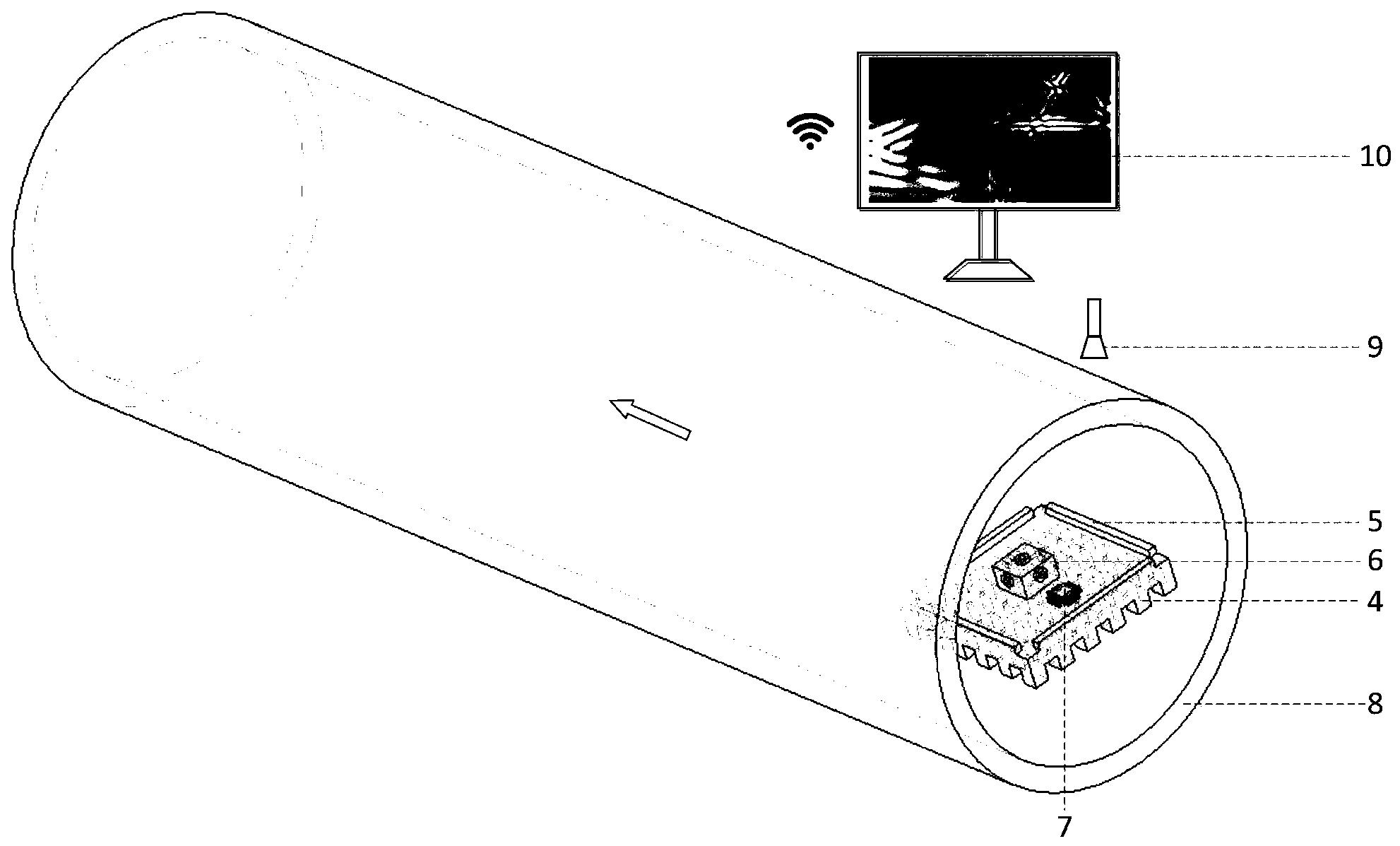
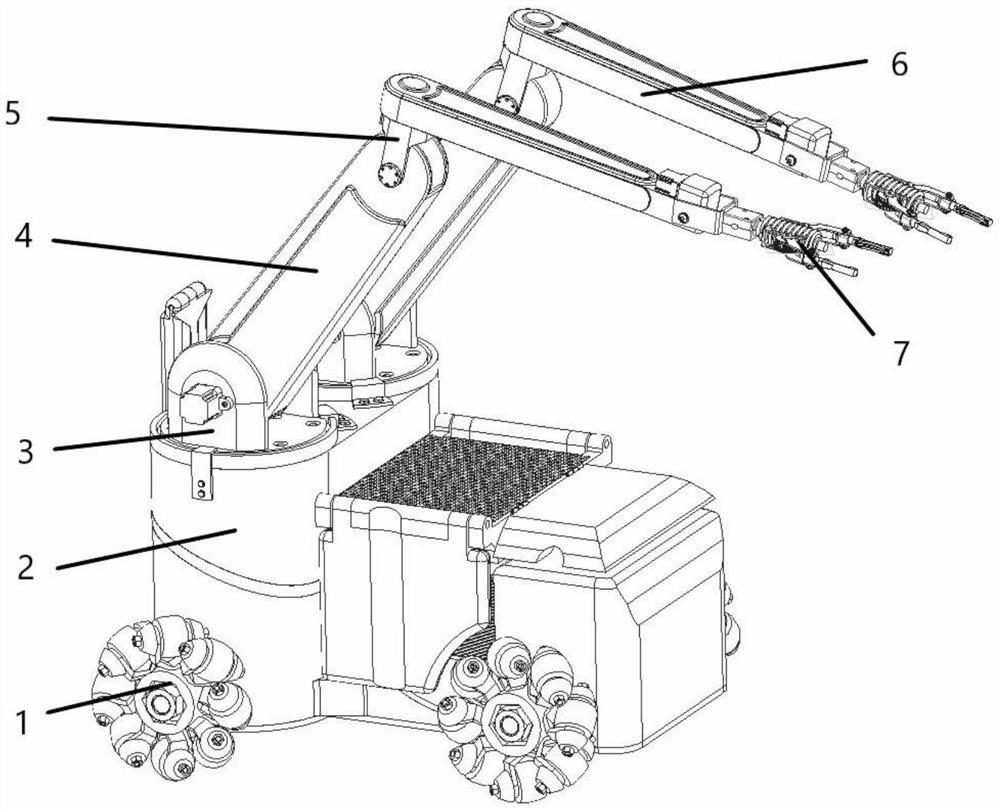
图1为根据一优选实施例示出的一种带有多视角检测的机器人;
图2为根据一优选实施例示出的一种带有多视角检测的机器人控制方法流程图;
图3为根据一优选实施例示出的一种带有多视角检测的机器人控制装置结构框图;
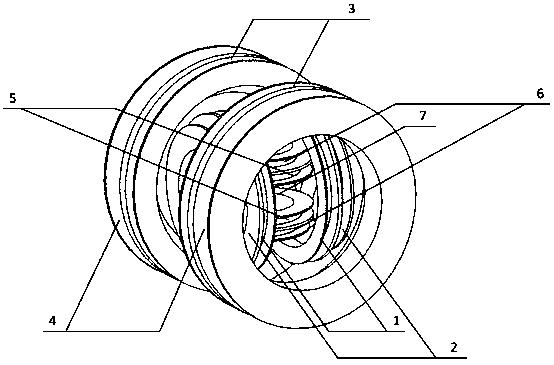
图4为根据一优选实施例示出的一种控制器的示意图。
图例说明:1-小车;11-轮子;12-第一电机;21-主臂;211-主关节;212-第一主电机;213-主水平旋转轴;214-主竖直旋转轴;215-第二主电机;22-副臂;31-后置摄像头;32-前置摄像头;33-终端摄像头;331-第一终端电机;332-水平终端旋转轴;333-第二终端电机;334-竖直终端旋转轴;335-终端关节;41-主轴;42-第二电机;43-竖直旋转轴,5-旋转按钮;6-车轮键;7-摄像头键;8-图像面板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例示出一种多视角检测的机器人,图1为根据一优选实施例示出的一种带有多视角检测的机器人;
所述机器人包括:小车1、多关节机械臂和摄像头;其中,
所述小车1包括:主连接装置,第一电机12和轮子11;
所述主连接装置包括:主轴41,竖直旋转轴43和第二电机42;
所述多关节机械臂包括:主臂21,副臂22和连接装置;
所述连接装置包括:第一主电机212,主水平旋转轴213,主关节211,第二主电机215和主竖直旋转轴214;
所述摄像头包括:终端摄像头33;
所述终端摄像头33包括:第一终端电机331,水平终端旋转轴332,第二终端电机333和竖直终端旋转轴334和终端关节335;
所述小车1的底部的四个顶角处分别设置有所述轮子11;所述第一电机12和所述主轴41分别设置于所述小车1内,所述第一电机12的旋转端与所述主轴41的一端相连接;所述主轴41的另一端与所述主臂21的一端通过所述主竖直旋转轴214相连接;所述主轴41与所述主臂21的连接处设置有所述第二电机42,所述第二电机42的转动端与所述主竖直旋转轴214相连接;
所述主臂21的另一端设置有第一主电机212;所述第一主电机212的转动端与所述主水平旋转轴213的一端相连接;所述主水平旋转轴213的另一端与所述主关节211的一端相连接,所述主关节211的另一端与所述副臂22的一端通过所述主竖直旋转轴214相连接;所述主关节211与所述副臂22的连接处设置有所述第二主电机215,所述第二主电机215的转动端与所述主竖直旋转轴214相连接;
所述副臂22的另一端设置有所述第一终端电机331,所述第一终端电机331的转动端与所述水平终端旋转轴332的一端相连接;所述水平终端旋转轴332的另一端与所述终端关节335的一端相连接;所述终端关节335的另一端与所述终端摄像头33通过所述竖直终端旋转轴334相连接;所述终端关节335与所述终端摄像头33的连接处设置有所述第二终端电机333;所述第二终端电机333的转动端与所述竖直终端旋转轴334相连接。
具体的,所述小车1的底部的四个顶角处分别设置有所述轮子11,所述小车1可以自由的移动;所述第一电机12的旋转端与所述主轴41的一端相连接,第一电机12转动带动所述主轴41在水平方向上转动,所述主轴41的另一端与所述主臂21的一端通过所述主竖直旋转轴214相连接,所述主轴41与所述主臂21的连接处设置有所述第二电机42,所述第二电机42的转动端与所述主竖直旋转轴214相连接,所述第二电机42转动带动所述主竖直旋转轴214在竖直方向上旋转,进而带动所述主臂21在竖直方向上运动。
所述主臂21的另一端设置有所述第一主电机212,所述第一主电机212的转动端与所述主水平旋转轴213的一端相连接;所述主水平旋转轴213的另一端与所述主关节211的一端相连接,主控制器控制所述第一主电机212转动,进而带动所述主水平旋转轴213转动;当所述主臂21位于水平方向上时,所述主水平旋转轴213转动,带动所述副臂22在垂直于水平面的方向上运动;当所述主臂21位于垂直方向上时,所述主水平旋转轴213转动,带动所述副臂22在水平面的方向上运动。
所述主关节211的另一端与所述副臂22的一端通过所述主竖直旋转轴214相连接;所述主关节211与所述副臂22的连接处设置有所述第二主电机215,所述第二主电机215的转动端与所述主竖直旋转轴214相连接;主控制器控制所述第二主电机215旋转,所述第二主电机215带动所述主竖直旋转轴214旋转,进而带动所述副臂22在竖直方向上运动,进而带动所述终端摄像头33在竖直方向上运动。
所述副臂22的另一端设置有所述第一终端电机331,所述第一终端电机331的转动端与所述水平终端旋转轴332的一端相连接;所述水平终端旋转轴332的另一端与所述终端关节335的一端相连接;所述主控制器控制所述第一终端电机331转动,带动所述水平终端旋转轴332转动,进而带动所述终端关节335运动,当所述副臂22位于水平方向上是,所述水平终端旋转轴332带动所述终端摄像头33在垂直于水平面的方向上运动;当所述副臂22位于垂直水平方向上时,所述水平终端旋转轴332带动所述终端摄像头33在水平面的方向上运动。
所述终端关节335的另一端与所述终端摄像头33通过所述竖直终端旋转轴334相连接;所述终端关节335与所述终端摄像头33的连接处设置有所述第二终端电机333;所述第二终端电机333的转动端与所述竖直终端旋转轴334相连接;主控制器控制所述第二终端电机333的转动进而带动所述终端摄像头33在竖直方向上运动。
进一步,所述多关节机械臂包括至少一条副臂22。
具体的,可以根据实际的作业环境来设置副臂22的数目。
进一步,所述小车1的长小于或等于50cm,所述小车1的宽小于或等于20cm。
针对管道的限制,将小车1设计成小于或等于50cm*20cm,即可以满足机器人在管道狭小空间内移动,同时要保证机器人在运动过程中保证一定的平稳性,同时,将小车1设计成小于或等于50cm*20cm也有利于车轮等其他零部件的安装分配。
进一步,所述主臂21长35cm-40cm;
进一步,所述副臂22长30cm-35cm。
主臂21和副臂22的设计长度出于对小车1的车身长度的考虑,也出于为了多关节机械臂可以伸长到更高的高度,主臂21设计成35cm-40cm也出于一美观考虑,不至于伸出小车1的车身;副臂22设计成35cm-40cm,长度比主臂21长度小的目的是为了增加多关节机械臂运动过程中的稳定性。
进一步,所述摄像头还包括:前置摄像头32和后置摄像头31,所述前置摄像头32设置于所述小车1的一端,所述后置摄像头31设置于所述小车1的另一端。
具体的,前置摄像头32和后置摄像头31通过旋转轴安置在小车1前后两端,前置摄像头32和后置摄像头31可以左右旋转,在机器人移动的过程中,通过观查前置摄像头32和后置摄像头31传输到控制器图像面板的画面来调整机器人的运动方向,使机器人可以避开障碍物,沿平稳路径移动。
进一步,所述摄像头设置有照明设备。
具体的,摄像头都配有照明设备,使机器人在暗处作业时,可以拍摄到更加清晰的画面。
进一步,所述轮子11为万向轮。
具体的,在小车1底座下方设有四个万向车轮,万向车轮控制使机器人可以沿任意方向运动。
本发明第二方面示出一种多视角检测的机器人控制方法,
图2为根据一优选实施例示出的一种带有多视角检测的机器人控制方法流程图;所述方法包括:
S110获取运动指令;
S120驱动所述机器人运动;
S130启动摄像头;
S140采集图片;
S150上传所述图片。
图4为根据一优选实施例示出的一种控制器的示意图。具体的,带有多视角检测的机器人的整个动作是通过如图4所示的控制器通过无线方式进行控制的,控制器包括控制面板和图像面板8,控制面板上有各个旋转轴和小车1运动方向对应的控制键,其中旋转按钮5分别控制各个轴的旋转来控制多关节机械臂和终端摄像头33的运动,车轮键7控制万向车轮的方向从而使小车1沿任意方向运动,摄像头键7分别控制前置摄像头32和后置摄像头31的旋转运动;图像面板8用于显示摄像头观察到的实时画面,通过观察图像面板8上的实时画面,使微型机器人可以平稳的运动到目标位置。
主控制器获取运动指令,并驱动所述机器人运动,所述机器人开始运动,主控制器发出一启动信号,启动摄像头采集图片,摄像头实时的采集GIS设备中的图像,并将图像上传至主控制器器进行存储。
本发明第三方面示出一种多视角检测的机器人控制装置,图3为根据一优选实施例示出的一种带有多视角检测的机器人控制装置结构框图;所述控制装置
获取装置201,所述获取装置201用于获取运动指令;
驱动装置202,所述驱动装置202用于驱动所述机器人运动;
启动装置203,所述启动装置203用于启动摄像头;
采集装置204,所述采集装置204用于采集图片;
上传装置205,所述上传装置205用于上传所述图片。
具体的,获取装置201获取运动指令,并上传至驱动装置202,驱动装置202驱动所述机器人运动,并发出一启动信号至启动装置203,启动装置203启动摄像头采集图片,采集装置204实时的采集GIS设备中的图像,上传装置205将图像上传至主控制器器进行存储。
由以上技术方案可知,本发明实施例示出一种多视角检测的机器人,控制方法及装置;所述机器人包括:小车1、多关节机械臂和摄像头;其中,所述小车1包括:主连接装置,第一电机12和轮子11;所述主连接装置包括:主轴41,竖直旋转轴43和第二电机42;所述多关节机械臂包括:主臂21,副臂22和连接装置;所述连接装置包括:第一主电机212,主水平旋转轴213,主关节211,第二主电机215和主水平旋转轴213;所述摄像头包括:终端摄像头33;所述终端摄像头33包括:第一终端电机331,水平终端旋转轴332,第二终端电机333和竖直终端旋转轴334和终端关节335;所述小车1的底部的四个顶角处分别设置有所述轮子11;所述第一电机12和所述主轴41分别设置于所述小车1内,所述第一电机12的旋转端与所述主轴41的一端相连接;所述主轴41的另一端与所述主臂21的一端通过所述主竖直旋转轴214相连接;所述主轴41与所述主臂21的连接处设置有所述第二电机42,所述第二电机42的转动端与所述主竖直旋转轴214相连接;所述主臂21的另一端设置有第一主电机212;所述第一主电机212的转动端与所述主水平旋转轴213的一端相连接;所述主水平旋转轴213的另一端与所述主关节211的一端相连接,所述主关节211的另一端与所述副臂22的一端通过所述主竖直旋转轴214相连接;所述主关节211与所述副臂22的连接处设置有所述第二主电机215,所述第二主电机215的转动端与所述主竖直旋转轴214相连接;所述副臂22的另一端设置有所述第一终端电机331,所述第一终端电机331的转动端与所述水平终端旋转轴332的一端相连接;所述水平终端旋转轴332的另一端与所述终端关节335的一端相连接;所述终端关节335的另一端与所述终端摄像头33通过所述竖直终端旋转轴334相连接;所述终端关节335与所述摄像头的连接处设置有所述第二终端电机333;所述第二终端电机333的转动端与所述竖直终端旋转轴334相连接;本发明实施例示出的机器人,通过各个电机控制相应旋转轴的旋转运动,从而使多关节机械臂可以在空间内进行多个方向的伸展运动;通过整个机械臂在空间多个方向的移动带动终端摄像头在多个方向移动,使机器人可以观测到更多复杂角度部位的目标图像,在进行设备检修的过程中可以增加更多的视野范围。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
多视角检测的机器人,控制方法及装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0