

IPC分类号 : B60F5/02,B64C1/14,B64C3/40,B64C3/56,B64C35/00,B64C39/02,B64C5/00,B64C5/08








专利摘要
本发明公开一种可变构型双体跨水空介质无人飞行器,两机身对称布置,由中翼和尾翼连接,外侧机翼可绕旋转轴改变后掠角,空中飞行时机翼展开,水下潜航时机翼后掠收容到机身两侧,翼身整流与机翼外形光顺过渡,水舵布置在后机身底部,尾翼呈倒V型布置,水下推进器安装在机身尾部,空中电机和空中螺旋桨通过电机塔安装在机身中部,电机塔可绕轴向后倾倒收容如机身中,倾倒后螺旋桨贴合于机身上表面。本发明集成飞行器及潜航器设计方法,可实现连续多次跨越水空界面,并在两种介质中持续航行,操稳性能良好,载荷能力强,可执行隐蔽突防侦查打击等任务。
权利要求
1.一种可变构型双体跨水空介质无人飞行器,其特征在于:采用双机身对称布置,机身外形采用鲨鱼流线,下机身为船身式设计,断阶将下表面分为前后两个滑行面,便于航行器以滑行方式出入水;两机身中部通过中翼连接,尾部通过倒V型尾翼连接;双机身外侧对称安装机翼,且机翼具有绕旋转轴转动自由度,改变机翼后掠角;在水下潜航时,机翼后掠收容到机身两侧,此时翼身整流与机翼外形光顺过渡;双机身间横向跨度为翼展的20%~30%;
上述双机身后方底部安装水舵;末端安装水下推进器;V尾与中翼上布置有舵面;左机翼与右机翼后缘具有副翼;
上述双机身中部安装有电机塔,电机塔顶部安装动力电机,动力电机输出轴上安装螺旋桨;电机塔具有绕轴向后倾倒自由度,使得电机塔向后倾倒后,动力电机与螺旋桨收容到机身中;
所述电机塔安装于左机身与右机身上的相对位置,同时通过收放驱动机构实现动力电机与螺旋桨收放入左机身与右机身内;电机塔包括摇臂、电机支座与挡叉;所述摇臂为空心的矩形横截面管;摇臂顶端固定安装有电机支座,电机支座上固定安装动力电机;摇臂下端固定安装有挡叉;挡叉顶端设计有连接突起,通过连接突起插入摇臂底端内,实现两者间的定位;上述电机支座上开有与摇臂内部连通的通孔,同时挡叉顶端也开有与摇臂连通的通孔,使动力电机的电缆可通过摇臂内部后,经挡叉内部引入机身;
所述收放驱动机构为一套液压驱动系统,包括液压缸、I型接头、支座A与支座B;其中,支座A用来连接液压缸的驱动活塞杆,同时用于实现摇臂与挡叉间的连接;支座A安装于摇臂底端侧壁上,支座A与摇臂和挡叉间的具体固定方式为:首先,在支座A上开有两个通孔;在挡叉上部前后侧壁上各开有两个螺孔,摇臂下端前后侧壁对应位置各开有两个螺孔,挡叉插入摇臂中之后,由螺钉通过支座A以及摇臂前侧壁上的螺孔拧入挡叉前侧壁上的螺孔中;再由螺钉通过摇臂后侧壁上的螺孔拧入挡叉后侧壁上的螺孔中;由此,实现支座A、摇臂与挡叉三者间的固定;液压缸的驱动活塞杆端部固定安装有I型接头,用销轴将I型接头连接于支座A上;液压缸的机体端通过销轴连接于支座B上,支座B通过2个连接位固定于机翼上;
上述摇臂与挡叉轴接于机身横梁上,具体连接方式为:在机身横梁上安装耳片,耳片上安装有轴承,通过销轴将摇臂和挡叉与耳片连接在一起,使摇臂和挡叉可以绕销轴转动;由此,当液压缸的驱动活塞杆伸缩时,摇臂和挡叉即绕销轴转动,实现动力电机和螺旋桨的收放;在收入状态时,动力电机与螺旋桨位于机翼上设计的收入舱内;动力电机和螺旋桨收入机翼的过程中,液压缸从挡叉中穿过,避免了机构干涉,结构紧凑,有效节约了机身内部空间, 在打开状态时,摇臂轴线垂直于水平面,进而使螺旋桨轴线沿机身前后方向;上述打开状态时,摇臂的打开角度可通过限位块进行限制;
在摇臂上安装螺旋桨相位锁定机构,实现螺旋桨的定位, 所述螺旋桨相位锁定机构包括导向片、作动舵机、导向套筒、导向杆与多连杆机构;
所述导向片具有中间部分、左部分与右部分;其中,中间部分为矩形上下侧边为限位配合侧边,左右侧边分别与左部分和右部分相接;左部分与右部分结构对称,为端部尖削的三角形;由此使整体导向片呈梭形结构;导向片通过中间部分中心位置上的开孔固连安装于动力电机的转轴上,并使导向片的中间部分上下侧边平行于螺旋桨的桨叶;
所述作动舵机固定安装于摇臂上,导向杆置于电机架顶部安装的沿竖直z轴方向设置导向套筒内;导向套筒位于动力电机前部下方,且处于导向片正下方位置;
所述多连杆机构用来连接作动舵机与导向杆,通过多连杆机构将作动舵机输出轴的旋转运动转变为直线运动,带动导向杆在导向套筒内上下运动。
2.如权利要求1所述一种可变构型双体跨水空介质无人飞行器,其特征在于:机身外侧蒙皮上设有舱门,当机翼展开时,舱门保持关闭状态;当机翼向后旋转时,舱门向内打开,机翼后掠,其中后部收容进入机身内。
3.如权利要求1所述一种可变构型双体跨水空介质无人飞行器,其特征在于:机身上表面设有电机舱门,当电机塔竖起时,舱门保持关闭状态;当电机塔向后倾倒时,舱门向内打开,电机塔、动力电机与螺旋桨收入机身蒙皮后,舱门再关闭。
说明书
技术领域
本发明涉及飞行器及潜航器领域,具体涉及一种可变构型双体跨水空介质无人飞行器。
背景技术
跨水空介质航行器是一种适应空气和水两种介质环境,可多次跨越水空界面并可在两种介质中持续航行的新概念航行器。跨水空介质航行器具有空中飞行和水下潜航两种构型,可通过结构变体实现构型的转换。其航行模式可分为空中飞行模式、近水面飞行模式、出入水面模式和水下潜航模式,可利用各种探测设备的盲区,切换海空航行模式来躲避敌方的监视,可用于执行海上侦察、打击、特种兵力投送等任务。跨水空介质航行器集成了飞行器和潜航器等诸多科学技术,针对空气与水环境介质的差异,在航行原理、布局、稳定性、操纵、材料、结构、动力等多方面进行综合设计。鉴于跨介质飞行器具有重要的军事价值和广阔的应用前景,国内外各主要军事强国一直在从事该类新型装备的开发。但由于跨水空介质航行器的设计变量多,子系统复杂,工程难度大,目前国内外在该领域的研究基本上都还处于总体概念设计、关键技术攻关和样机验证阶段,尚未有国家成功研制出具有工程实用价值的产品。
发明内容
为了填补国内外在跨水空介质航行器领域上的空白,本发明提出了一种可变构型双体跨水空介质无人飞行器。
本发明可变构型双体跨水空介质无人飞行器,采用双机身对称布置,两机身中部通过中翼连接,尾部通过倒V型尾翼连接;双机身外侧对称安装机翼,且机翼具有绕旋转轴转动自由度,改变机翼后掠角;在水下潜航时,机翼后掠收容到机身两侧,此时翼身整流与机翼外形光顺过渡;
上述双机身后方底部安装水舵;末端安装水下推进器;V尾与中翼上布置有舵面;左机翼与右机翼后缘具有副翼。
上述双机身中部安装有电机塔,电机塔顶部安装动力电机,动力电机输出周上安装螺旋桨;电机塔具有绕轴向后倾倒自由度,使得电机塔向后倾倒后,动力电机与螺旋桨收容到机身中。
本发明的优点在于:
1、本发明一种可变构型双体跨水空介质无人飞行器,采用双机身布局形式,横向稳定性好,滚转阻尼大,有利于航行器在水下航行及界面跨越的姿态控制;
2、本发明一种可变构型双体跨水空介质无人飞行器,采用双机身布局形式,增加了机舱空间,提高了载荷布置的灵活性和多样性,拓展了航行器任务包线;
3、本发明一种可变构型双体跨水空介质无人飞行器,采用变构型的技术途径,解决了航行器在两种不同流体介质中性能需求的矛盾,空中构型采用大展现比双机身布局,升阻比高,气动性能好。水下将机翼和螺旋桨收容进机身,有效减少水下浸润面积,水动阻力减小。综合提高了全任务剖面气动、水动性能,可实现空中飞行、水下潜航及反复连续跨越水面等功能;
4、本发明一种可变构型双体跨水空介质无人飞行器,左右机身通过中翼连接,中翼上设有升降舵面,中翼焦点与全机重心位置接近,中翼产生的升力对全机姿态影响较小,可视为直接力控制。水下航行可依靠中翼舵面偏转产生升力进行深度控制,尾翼舵面偏转进行姿态控制,实现了深度与姿态的控制解耦,降低了控制难度;
附图说明
图1为本发明可变构型双体跨水空介质无人飞行器空中构型示意图;
图2为本发明可变构型双体跨水空介质无人飞行器水下构型示意图;
图3为本发明可变构型双体跨水空介质无人飞行器中倒V型尾翼结构示意图;
图4为本发明可变构型双体跨水空介质无人飞行器中倒V型尾翼的侧翼内传力结构示意图;
图5为本发明可变构型双体跨水空介质无人飞行器中倒V型尾翼的水平连接翼段内传力结构示意图;
图6为本发明可变构型双体跨水空介质无人飞行器中倒V型尾翼各部分连接方式示意图;
图7为本发明可变构型双体跨水空介质无人飞行器中倒V型尾翼的水平连接翼段内传力结构上调节孔示意图;
图8为本发明可变构型双体跨水空介质无人飞行器中电机塔结构示意图;
图9为本发明可变构型双体跨水空介质无人飞行器中电机塔的挡叉结构示意图;
图10为本发明可变构型双体跨水空介质无人飞行器中电机塔收放状态示意图;
图11为本发明可变构型双体跨水空介质无人飞行器中螺旋桨相位锁定机构结构示意图;
图12为本发明可变构型双体跨水空介质无人飞行器中螺旋桨相位锁定机构中导向片结构示意图;
图13为本发明可变构型双体跨水空介质无人飞行器中螺旋桨相位锁定机构锁定状态示意图。
图中:
1-机身 2-机翼 3-中翼
4-倒V型尾翼5-水舵 6-水下推进器
7-电机塔 8-动力电机 9-螺旋桨
10-收放驱动机构11-机身横梁12-螺旋桨相位锁定机构
101-翼身整流 102-机翼收容腔 401-左侧V尾
402-右侧V尾403-水平连接翼段 402a-加强肋
402b-前梁腹板402c-后梁腹板402d-角片
402e-调节孔403a-前连接盒403b-后连接盒
403c-底板701-摇臂 702-电机支座
703-挡叉 704-耳片 705-限位块
706-连接突起 10a-液压缸 10b-I型接头
10c-支座A10d-支座B12a-导向片
12b-作动舵机 12c-导向套筒 12d-导向杆
12e-舵机摇臂 12f-第一连杆 12g-第二连杆
12h-第三连杆 12a1-中间部分12a2-左部分
12a3-右部分12a4-限位配合侧边
具体实施方式
下面结合附图对本发明做进一步详细说名。
本发明一种可变构型双体跨水空介质无人飞行器,包括机身1、机翼2、中翼3、倒V型尾翼4、水舵5、水下推进器6、电机塔7、动力电机8和螺旋桨9,如图1所示。
所述机身1包括左机身与右机身,左右对称布置,外侧设计有翼身整流101。同时,左机身与右机身末端端部安装有水下推进器6,用于潜航状态下提供前进动力。左机身与右机身后部下方布置有水舵5,用于水下和水面航行航向操纵。左机身与右机身的外形根据鲨鱼流线外形进行设计,可降低机身1阻力,并产生负升力,便于航行水中进行动力下潜。左机身与右机身下部采用船身式设计,便于航行器在水面滑行及起降。同时,左机身与右机身间横向跨度大,为翼展的20%~30%,水面滑行横向稳定性好,横摇衰减快,耐波性好;水下航行滚转阻尼大,横向操纵力臂大,便于姿态控制。
上述左机身与右机身中部内侧间通过水平中翼3连接,中翼3采用对称翼型,后缘具有中翼升降舵。水下巡航可通过控制中翼升降舵改变升力,对飞行器进行升沉操作;空中起降过程中翼升降舵舵面下偏可作为增升襟翼。左机身与右机身尾部间通过倒V型尾翼4连接,整体刚度好。
所述机翼2包括左机翼与右机翼,均采用高升阻比设计,分别安装于左机身与右机身中部外侧,通过转轴与左机身和右机身连接,左机翼与右机翼可绕转轴改变后掠角。机身1外侧设计有机翼收容腔102,且机翼收容腔102处机身1蒙皮上设有舱门。在空中巡航时,左机翼与右机翼展开至大展弦比状态,提供巡航升力;此时,舱门保持关闭状态,保证机身1表面光顺连续。当水下巡航时,机翼2向后旋转时,舱门向内打开,左机翼与右机翼分别后掠收入左机身与右机身侧壁上的机翼收容腔102内,解决了机翼2变体与蒙皮干涉的问题,如图2所示;此时左机翼和右机翼分别与左机身和右机身上的翼身整流101外形光顺过渡;且左机翼与右机翼不再产生升力,阻力也被降至最小,提高了水下巡航性能。上述左机翼与右机翼后缘具有副翼,用于飞行状态时进行滚转操纵。
所述倒V型尾翼4采用倒V型设计,包括左侧V尾401、右侧V尾402;左侧V尾401与右侧V尾402底部分别与左机身和右机身尾部固定,既起到两机身间的连接作用,又减少了浸润面积,降低阻力。同时,使倒V型尾翼4与中翼构成三角结构,增加了整体结构刚度;且倒V尾4位于左机身与右机身中间,避开了外翼下洗气流及整流边条涡的影响,又处于螺旋桨滑流中,增加了尾翼舵效。上述左侧V尾401与右侧V尾402后缘具有V尾舵面,用于进行俯仰和偏航操纵。
本发明中还设计左侧V尾401与右侧V尾402顶部间通过水平连接翼段403连接,如图3所示;且与水平连接翼段403外蒙皮间光顺过渡;由此增大了V尾顶部流场宽度,从而减弱左侧V尾401与右侧V尾402间的相互干扰,提高倒V型尾翼4的气动效率。而常规倒V型尾翼的左侧V尾401与右侧V尾402顶部直接相连,形成三角区域,左侧V尾401与右侧V尾402连接处间流场相互干扰,气动效率降低,影响航向稳定性。为了满足左侧V尾401与右侧V尾402安装角可调节的要求,左侧V尾401与右侧V尾402同水平连接翼段403左右侧连接的分离面分别垂直于左侧V尾401与右侧V尾2安装角调整轴,在V尾安装角改变过程中,水平连接翼段不会与其发生干涉。
上述左侧V尾401与右侧V尾402内部以及水平连接翼段403内部均安装有传力结构。其中,左侧V尾401与右侧V尾402内部传力结构相同,包括加强肋402a、前梁腹板402b、后梁腹板402c与角片402d,如图4所示。加强肋402a前后两端分别与前梁腹板402b和后梁腹板402c顶端间通过角片402d连接,通过在加强肋402a、前梁腹板402b与后梁腹板402c的左右两侧设计翻边,增加与蒙皮的连接面积,使加强肋402a、前梁腹板402b与后梁腹板402c与蒙皮间牢固相连。上述连接形式简单可靠,连接强度高,结构效率高。
水平连接翼段403内部的传力结构包括前连接盒403a、后连接盒403b与底板403c,如图5所示。其中,前连接盒403a与后连接盒403b均采用双腹板盒式结构,上表面开放方便螺栓安装。前连接盒403a与后连接盒403b分别置于底板403c前后端部,构成参差梁形式,可将扭矩转为一对方向相反的弯矩传递。前连接盒403a与后连接盒403b的下表面通过螺栓与底板403c间固定连接,前连接盒403a与后连接盒403b的左右端面分别与左侧V尾401和右侧V尾402顶部加强肋402a间螺栓连接固定。底板403c不参与结构传力,主要起到定位安装作用。上述结构的水平连接翼段403具有理想的抗弯和抗扭能力。前连接盒403a与后连接盒403b的左右端面分别与左侧V尾401和右侧V尾402顶部加强肋402a间螺栓连接固定。由此倒V型尾翼中,左侧V尾401与右侧V尾402上的弯矩、扭矩、剪力均可由加强肋402a通过螺栓传递给前连接盒403a与后连接盒403b。前连接盒403a与后连接盒403b间的空间可以安放接收机、发射机等通讯设备,天线高置,可减小机体对信号的遮挡,增大通讯可靠性。
上述水平连接翼段403蒙皮外形,由左右V尾蒙皮端面外形沿水平方向拉升得到,蒙皮无缝对接,水平连接翼段403上表面设有蒙皮口盖。
为了在实现左侧V尾401与右侧V尾402同水平连接翼段403间的连接固定基础上,同时具备左侧V尾401与右侧V尾402安装角可调节功能,本发明中水平连接翼段403与左侧V尾401和右侧V尾402间的具体连接方式为,如图6所示:在前连接盒403a与后连接盒403b的左右侧壁上各开有上下位置的两个螺孔403c,同时在加强肋402a的前端与后端对应位置各开有两个调节孔402e,由此对应的螺孔403c与调节孔402e间通过螺栓完成前连接盒403a和后连接盒403b与左侧V尾401和右侧V尾402内的加强肋402a间的固定,连接强度高,牢固可靠,拆装方便快捷。如图7所示,上述调节孔402e设计为条形孔,且在加强肋402a上前端与后端中,位于异侧的两个条形孔中心连线相交于一点,该点处为左侧V尾401和右侧V尾402的安装角调整转轴。由此,当左侧V尾401或右侧V尾402绕各自调整转轴转动时,调节孔402e处的螺栓安装位置也会相应调整,此时无需调整水平连接翼段403位置,只需要改变螺栓在螺孔403c上的定位,即可实现V尾安装角的变化;图5中虚线区域所示为左侧V尾401与右侧V尾402安装角调节范围;由此在不影响连接强度的前提下,可以灵活调整V尾安装角,以满足飞行器不同飞行载荷、不同任务对飞机性能的不同要求,大大拓展了飞行器的任务包线与载荷多样性。
为了满足外场快速拆装要求,可预先将水平连接翼段403与一侧V尾连接紧固,则外场只需要安装四颗螺栓与另一侧翼相连接,即可完成倒V型尾翼的组装,大大缩短结构组装时间。
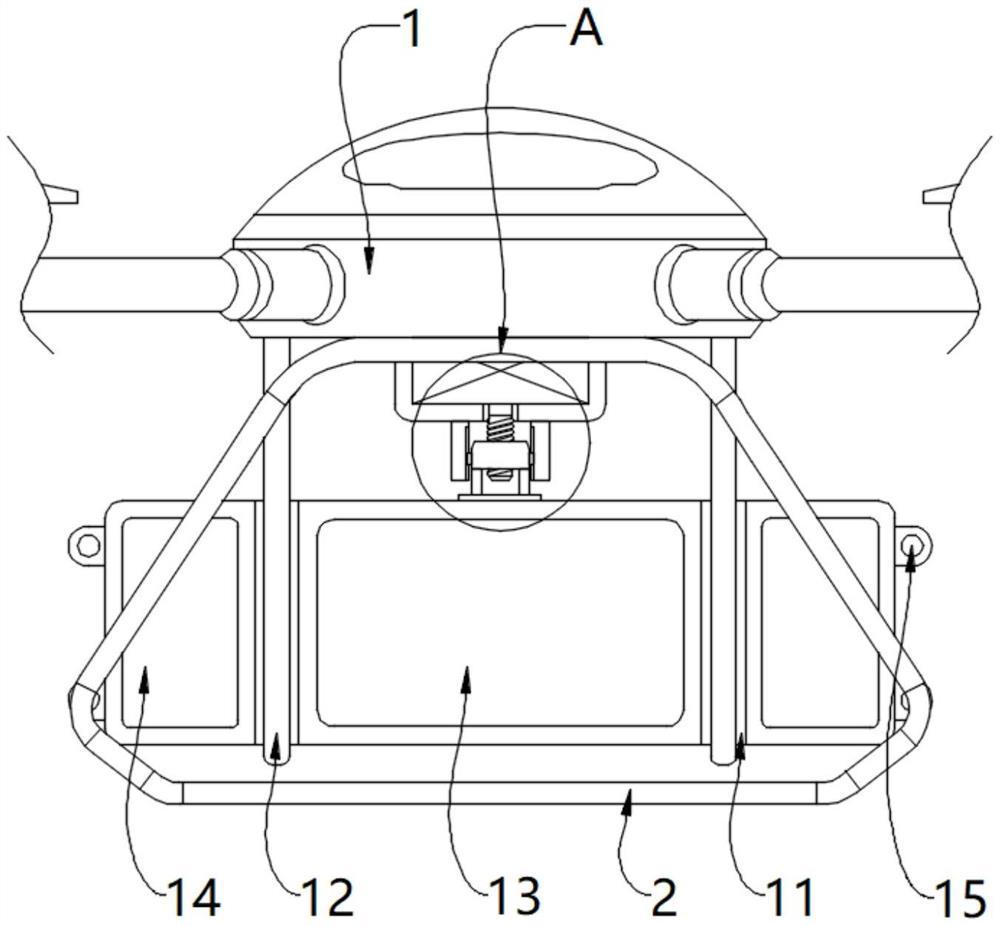
所述电机塔7安装于左机身与右机身上的相对位置,用来支撑飞行器的动力电机8,同时通过收放驱动机构10实现动力电机8与螺旋桨9收放入左机身与右机身内。电机塔7包括摇臂701、电机支座702与挡叉703,如图8所示。所述摇臂701为空心的矩形横截面管;空心结构摇臂701在满足强度刚度要求下,可最大限度减轻摇臂重量。摇臂701顶端固定安装有电机支座702,电机支座702上固定安装动力电机8,通过电机支座702承托动力电机8。摇臂701下端固定安装有挡叉703。如图9所示,挡叉703为倒U型结构,顶端设计有连接突起706,通过连接突起706插入摇臂701底端内,实现挡叉703与摇臂701间的定位。上述电机支座702上开有与摇臂701内部连通的通孔,同时挡叉703顶端也开有与摇臂701连通的通孔,使动力电机8的电缆可通过摇臂701内部后,经挡叉703内部引入机身。
所述收放驱动机构10为一套液压驱动系统,包括液压缸10a、I型接头10b、支座A10c与支座B10d。其中,支座A10c用来连接液压缸10a的驱动活塞杆,同时用于实现摇臂701与挡叉703间的连接。支座A10c安装于摇臂701底端侧壁上,支座A10c与摇臂701和挡叉703间的具体固定方式为:首先,在支座A10c上开有两个通孔。在挡叉703上部前后侧壁上各开有两个螺孔,摇臂701下端前后侧壁对应位置各开有两个螺孔,挡叉703插入摇臂1中之后,由螺钉通过支座A10c以及摇臂1前侧壁上的螺孔拧入挡叉703前侧壁上的螺孔中。再由螺钉通过摇臂701后侧壁上的螺孔拧入挡叉703后侧壁上的螺孔中。由此,实现支座A10c、摇臂701与挡叉703三者间的固定。液压缸10a的驱动活塞杆端部固定安装有I型接头10b,用销轴将I型接头10b连接于支座A10c上。液压缸10a的机体端通过销轴连接于支座B10d上,支座B10d通过2个连接位固定于机翼2上。
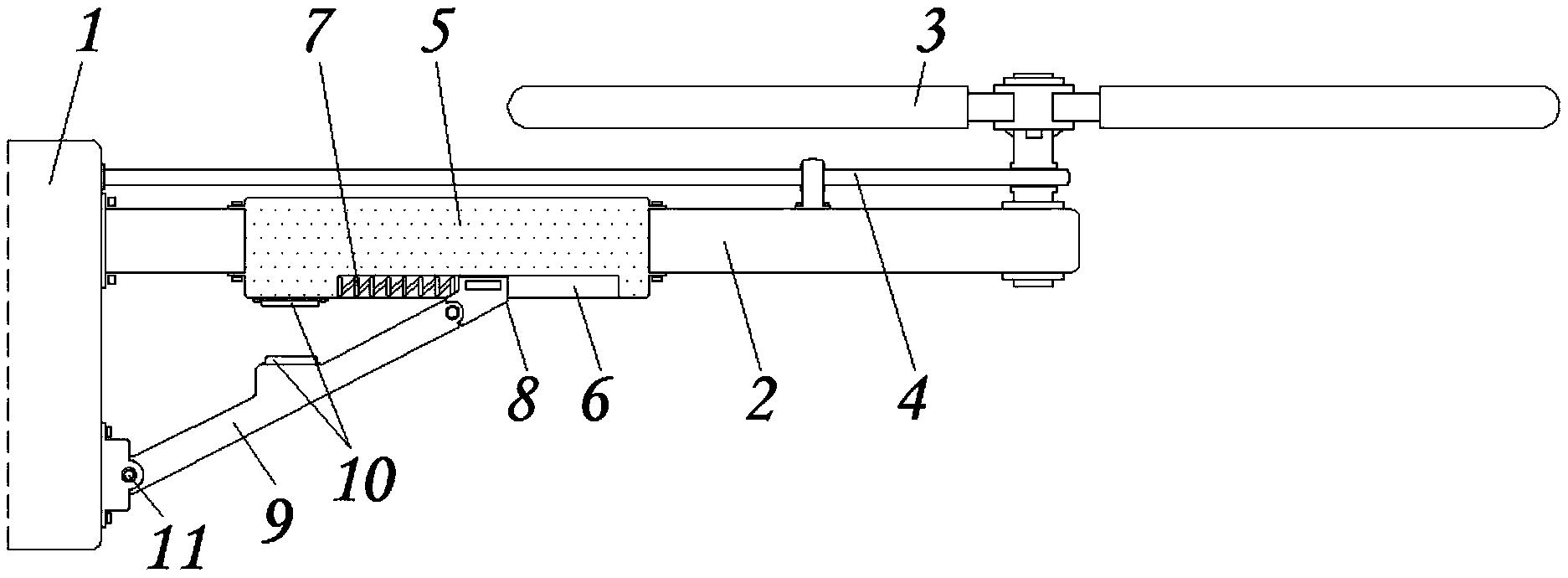
上述摇臂701与挡叉703轴接于机身横梁11上,具体连接方式为:在机身横梁11上安装耳片704,耳片704上安装有轴承,通过销轴将摇臂701和挡叉703与耳片704连接在一起,使摇臂701和挡叉703可以绕销轴转动。由此,当液压缸10a的驱动活塞杆伸缩时,摇臂701和挡叉703即绕销轴转动,实现动力电机8和螺旋桨9的收放。在收入状态时,动力电机8与螺旋桨9位于机翼2上设计的收入舱内;如图10所示,动力电机8和螺旋桨9收入机翼2的过程中,液压缸10a从挡叉703中穿过,避免了机构干涉,结构紧凑,有效节约了机身内部空间。在打开状态时,摇臂701轴线垂直于水平面,进而使螺旋桨9轴线沿机身前后方向。
上述打开状态时,摇臂701的打开角度可通过限位块705进行限制,该限位块706为L型结构安装于机身的隔框上,位于机身横梁中点正下方。在摇臂704打开过程中,挡叉703底端会与限位块705侧壁接触,此时摇臂701受限位块705阻挡无法继续打开,此时摇臂701轴线垂直水平面。且在飞机飞行时,螺旋桨产生的拉力通过摇臂701和挡叉703传递于机身与限位块705上,螺旋桨9高置对机身产生的扭矩因此得到卸载,大大改善了机翼和机身的受力特性。
上述动力电机8与螺旋桨9在收入时,由于收入舱形状固定,需要使螺旋桨保持固定角度后进行收放,才可进入收入舱内。本发明中收入舱设计为条形,收入时需要使螺旋桨9同摇臂701轴线重合,整体成一字后进行收放。因此本发明中通过在摇臂上安装螺旋桨相位锁定机构12,实现螺旋桨9的定位。
所述螺旋桨相位锁定机构12包括导向片12a、作动舵机12b、导向套筒12c、导向杆12d与多连杆传动机构,如图11所示。
所述导向片12a具有中间部分12a1、左部分12a2与右部分12a3,如图所示。其中,中间部分12a1为矩形上下侧边为限位配合侧边12a4,左右侧边分别与左部分12a2和右部分12a3相接。左部分12a2与右部分12a3结构对称,为端部尖削的三角形;由此使整体导向片12a呈梭形结构。导向片12a通过中间部分12a1中心位置上的开孔固连安装于动力电机8的转轴上,并使导向片12a的中间部分14a1上下侧边平行于螺旋桨9的桨叶。
所述作动舵机12b固定安装于摇臂上,导向杆12c置于电机架顶部安装的沿竖直z轴方向设置导向套筒12c内;导向套筒12c位于动力电机8前部下方,且处于导向片12a正下方位置。
所述多连杆机构用来连接作动舵机12b与导向杆12c,通过多连杆机构将作动舵机12b输出轴的旋转运动转变为直线运动,带动导向杆12c在导向套筒12c内上下运动。
所述多连杆机构包括舵机摇臂12e、第一连杆12f、第二连杆12g和第三连杆12h。其中,舵机摇臂12e输入端固定安装于作动舵机12b输出轴上;舵机摇臂12e输出端与第一连杆12f输入端铰接,第一连杆12f输出端与第二连杆12g输入端铰接;第二连杆12g输出端与第三连杆12h输入端铰接,第三连杆12输出端与导向杆12c底端铰接;且其中第二连杆12f中心位置通过转轴连接于摇臂701上,形成转动副。
由此,当螺旋桨9停转后,通过作动舵机12b驱动导向杆12c向上运动,导向杆12c向上运动过程中,首先顶端触碰到导向片12a侧壁,此时由导向杆12c推动导向片12a旋转,从而通过动力电机8的转轴带动螺旋桨9转动。随后导向杆12d继续上移,最终导向杆12d侧壁与导向片12a中间部分侧壁紧贴,此时导向片12a和螺旋桨9停止转动,螺旋桨9相位被锁定,如图所示;此时螺旋桨9的桨叶沿z轴方向。上述过程中,导向杆12d的运动不通过导向片12a的转轴,从而在作动过程中避免了死点。
本发明可变构型双体跨水空介质无人飞行器飞行状态下,机翼3展开,电机塔7竖起,动力电机8驱动螺旋桨9提供向前推力;潜航状态下,为减小外形阻力,将机翼3后掠收容到机身两侧机翼收放槽内,动力电机8停转,由螺旋桨相位机构12锁定螺旋桨9,电机塔7倒下置于收入舱内,并关闭收入舱舱门,起到减小水阻力和保护螺旋桨9的作用。机身尾部推进器提供前进动力。上述收入舱处设有电机舱门,当电机塔7竖起时,舱门保持关闭状态;当电机塔7向后倾倒时,舱门向内打开,电机塔7、动力电机8与螺旋桨9收入机身中,随后舱门再关闭,解决了动力电机和螺旋桨收容时与蒙皮干涉的问题,
上述飞行状态与潜航状态中,飞行器姿态操控方式有所不同:空中状态时,由机翼3提供主要升力,倒V型尾翼4可进行俯仰和偏航操纵,左机翼与右机翼的副翼进行滚转操纵,中翼3作为增升襟翼,螺旋桨9差动可控制偏航。潜航状态时,由机身1提供负升力,可实现动力下潜,倒V型尾翼4可进行俯仰和偏航操纵,机身1内浮心重心调节装置可操纵滚转,中翼可直接力控制升沉,水下推进器6差动可操纵偏航。
一种可变构型双体跨水空介质无人飞行器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0