






专利摘要
本实用新型涉及一种螺旋型微型机器人,所述螺旋型微型机器人的螺旋角为15‑75°,所述螺旋型微型机器人的体长为40‑1000μm,其能在磁场驱动下进行运动,且所述螺旋型微型机器人的制备方法简单,制备得到的螺旋型微型机器人的一致性好,产量高,可用于靶向送药。
权利要求
1.一种螺旋型微型机器人,其特征在于,所述螺旋型微型机器人的螺旋角为15-75°,所述螺旋型微型机器人的体长为40-1000μm;
所述螺旋型微型机器人由长条形平行四边形卷曲得到,所述长条形平行四边形的一侧底角为20-40°。
2.如权利要求1所述的螺旋型微型机器人,其特征在于,所述螺旋型微型机器人的螺旋角为20-40°。
3.如权利要求1所述的螺旋型微型机器人,其特征在于,所述螺旋型微型机器人的体长为50-400μm。
4.如权利要求1所述的螺旋型微型机器人,其特征在于,所述螺旋型微型机器人为螺旋片状结构。
5.如权利要求4所述的螺旋型微型机器人,其特征在于,所述螺旋片状结构的片状厚度为20-300nm。
6.如权利要求1所述的螺旋型微型机器人,其特征在于,所述螺旋型微型机器人为金属材料。
7.如权利要求6所述的螺旋型微型机器人,其特征在于,所述螺旋型微型机器人的材质为铁磁性金属材料。
8.如权利要求7所述的螺旋型微型机器人,其特征在于,所述螺旋型微型机器人的材质为镍。
说明书
技术领域
本实用新型属于微型机器人领域,涉及一种螺旋型微型机器人。
背景技术
近年来,越来越多科研工作者将目光投向微型机器人。微型机器人因为其体积小的特点从而可以进入一些狭窄区域协助外科医生完成手术。依靠化学燃料、外部电场、光场、超声和磁场驱动的微纳米机器人的制备在最近几年来取得飞快的进步。在这些不同类型的驱动方式中,磁场驱动因其无毒和可操作性强的特点受到了越来越多科学家的关注。
常见的磁场驱动方式包括了旋转磁场驱动和梯度磁场驱动两种。但是梯度磁场需要较大的磁场强度和较低的驱动效率,因此更多人把希望寄托于旋转磁场上。而当一个物体缩小至一定尺寸后,惯性力不再占据主导作用,一般的往复运动将不再能让微小物体在液体中获得向前的速度。因此在旋转磁场作用下,简单的往复式旋转运动不会让物体获得一个向前的速度。自然界中有两种微型生物,一种是具有柔性尾巴的精子细胞,另外一种是具有螺旋型鞭毛的细菌,该种细菌的分子马达会驱动螺旋型的鞭毛产生旋转运动,从而产生一个向前的驱动力。受到自然界的启发,科学家一直至于制备这种可被旋转磁场驱动的仿生螺旋型微型机器人。
2019年,瑞士苏黎世联邦理工大学的张立博士利用不同材料晶格不匹配从而产生应力的特性制备了这种螺旋型的三维结构,(参见文献:Zhang,L.,et al.,Artificialbacterial flagella:Fabrication and magnetic control.Applied Physics Letters,2009.94(6):p.064107.);科学家在制备螺旋型结构时,增加了磁性材料镍,磁性头部会随着外部旋转磁场旋转,从而带动非磁性螺旋型尾部转动,从而获得向前运动的能力。
目前,螺旋型机器人的制备方法包括以下步骤:首先,将砷化铝镓牺牲层和双层砷化镓铟/砷化镓通过分子束外延生长在晶向为001方向的砷化镓(GaAs)基底上;之后铬层通过电子束蒸镀的方式进行沉积;随后砷化镓铟/砷化镓/铬三层通过反应离子刻蚀的方式得到一个带状的图形;软磁性的头部是通过铬/镍/金层薄膜沉积和剥离工艺制备,最后,砷化铝镓牺牲层在2%氢氟酸溶液里进行选择性刻蚀,平面带状图案自发卷曲形成螺旋型结构;此方案存在的问题是制备步骤繁琐,涉及到的制备仪器较多,同时,制备中需要使用危险性很高的氢氟酸溶液。
同时,将微型机器人用于靶向送药对送药量有着较高的要求,但是每个微型机器人上所载抗癌药物都是有限的,因此实现多个微型机器人对一处肿瘤细胞的送药,这个时候就对微型机器人的产量有着很高的要求;而目前采用的螺旋型微型机器人的制备过程的效率均较低,产率不足,且产品的一致性较差。
而采用激光直写打印机技术,其仅适用于光敏材料,一般为非金属材料和无磁材料,打印效率低,约为1-2秒/个,且成本较高。
因此,开发一种产量高的螺旋型微型机器人仍具有重要意义。
实用新型内容
本实用新型的目的在于提供一种螺旋型微型机器人,所述螺旋型微型机器人的螺旋角为15-75°,所述螺旋型微型机器人的体长为40-1000μm,其能在磁场驱动下进行运动,且所述螺旋型微型机器人的制备方法简单,制备得到的螺旋型微型机器人的一致性好,产量高,可用于靶向送药。
为达到此实用新型目的,本实用新型采用以下技术方案:
本实用新型提供了一种螺旋型微型机器人,所述螺旋型微型机器人的螺旋角为15-75°,例如15°、30°、45°、60°或75°等,所述螺旋型微型机器人的体长为40-1000μm,例如100μm、200μm、300μm、400μm、500μm、600μm、700μm、800μm或900μm等。
本实用新型所述螺旋型微型机器人的体长可通过如下方法计算得到:
其中,L为螺旋型微型机器人的体长,θ为螺旋型微型机器人的螺旋角;R为螺旋型微型机器人的半径。
优选地,所述螺旋型微型机器人由长条形平行四边形卷曲得到,所述长条形平行四边形的一侧底角为15-75°,例如15°、30°、45°、60°或75°等,优选为20-40°。
本实用新型所述螺旋型微型机器人通过长条形平行四边形卷曲得到,并控制长条形平行四边形的一侧底角为20-40°,由其得到的螺旋型微型机器人在磁场的驱动下具有更高的运动性能。
优选地,所述长条形平行四边形进行卷曲后,以长条形平行边形的长边计,每30-80μm,例如35μm、40μm、45μm、50μm、55μm、60μm、65μm、70μm或75μm等,为螺旋型微型机器人的一匝。
优选地,所述螺旋型微型机器人的螺旋角为20-40°,例如22°、24°、26°、28°、30°、32°、34°、36°或38°等。
本实用新型所述螺旋型微型机器人的螺旋角在上述范围内,其有利于螺旋型微型机器人在磁场的作用下进行运动,改善微型机器人的运动性能。
优选地,所述螺旋型微型机器人的体长为50-400μm,例如100μm、120μm、150μm、200μm、250μm、300μm或350μm等。
优选地,所述螺旋型微型机器人为螺旋片状结构。
优选地,所述螺旋片状结构的片状厚度为20-300nm,例如50nm、100nm、150nm、200nm或250nm等,优选为80-100nm。
本实用新型所述螺旋型微型机器人为螺旋片状结构,其螺旋片状结构的片状厚度为20-300nm,其厚度在上述范围内,有利于所述螺旋型微型机器人在磁场驱动下进行运动。
优选地,所述螺旋型微型机器人为金属材料。
优选地,所述螺旋型微型机器人的材质为铁磁性金属材料。
优选地,所述螺旋型微型机器人的材质为镍(Ni)、钛(Ti)、钴(Co)、铜(Cu)、金(Au)、铂(Pt)、铝(Al)、铁(Fe)或钴镍合金(CoNi)中的任意一种或至少两种的组合,优选为镍。
本实用新型所述的螺旋型微型机器人可通过如下方法制备得到,所述方法包括以下步骤:
(a)将光刻胶倾倒在硅片上,在转速为2000-4000rpm的条件下进行旋涂,所述旋涂的时间为45-30s,得到光刻胶层;
(b)将步骤(a)得到的光刻胶层在90-110℃的条件下烘烤90-60s,之后冷却至常温;
(c)将设计的菲林板图案通过紫外曝光的方式印刻在光刻胶层上,紫外曝光的紫外光的波长为300-370nm,所述紫外光的强度为5-13mW/cm
(d)将金属材料通过电子束蒸镀的方式沉积在步骤(c)得到的长条形平行四边形的光刻胶上,电子束蒸镀的沉积速率为 得到厚度为20-300nm的金属材料层;之后将其浸泡在温度为80-100℃的N-甲基吡咯烷酮中,超声处理30-90s,之后继续浸泡1-3天,用异丙醇和水清洗,得到所述螺旋型微型机器人。
本实用新型所述螺旋型微型机器人的制备过程中通过在基底上形成特定图形的光刻胶层,之后在光刻胶层上蒸镀金属材料层,之后将其置于溶剂中浸泡溶解所述光刻胶,由于光刻胶的溶胀作用带动所述金属材料层卷曲,当图形的排列方向和卷曲方向有偏差时,光刻胶层与金属材料层一同卷成螺旋型结构,之后进一步浸泡溶解,从而完成单层螺旋型微型机器人的制备;本实用新型所述方法的制备过程简单,且能实现大批量制备。
本实用新型所述螺旋型机器人的制备过程中利用光刻胶在溶剂中的溶胀作用使得光刻胶和其表面的金属材料层一同卷曲形成螺旋型结构,为达上述目的,此处需控制光刻胶的形状为长条形平行四边形,并控制其一侧底角为15-75°。
本实用新型所述螺旋型微型机器人的制备方法的制备过程效率高,其可达5-10个/秒。
所述长条形平行四边形进行卷曲后,以长条形平行边形的长边计,每30-80μm,例如35μm、40μm、45μm、50μm、55μm、60μm、65μm、70μm或75μm等,为螺旋型微型机器人的一匝。
优选地,步骤(1)所述光刻胶层的光刻胶为负胶。
优选地,步骤(1)所述光刻胶层的厚度为2-8μm,例如3μm、4μm、5μm、6μm或7μm等。
本实用新型所述的螺旋型微型机器人用于靶向送药。
相对于现有技术,本实用新型具有以下有益效果:
(1)本实用新型所述螺旋型微型机器人的螺旋角为15-75°,其体长为40-1000μm,其能在磁场驱动下进行运动,可作为靶向送药的载体;
(2)本实用新型所述螺旋型微型机器人的制备过程简单,适于大批量生产。
附图说明
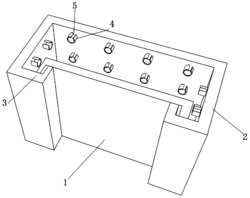
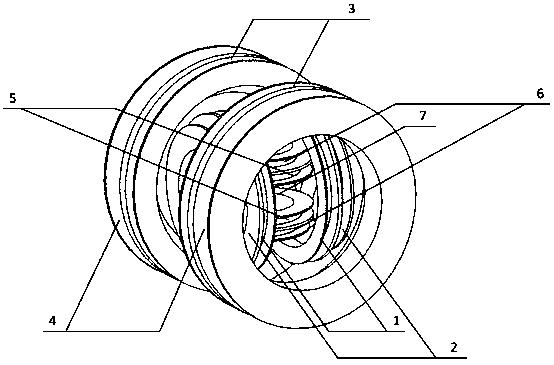
图1是本实用新型所述螺旋型微型机器人的结构示意图;
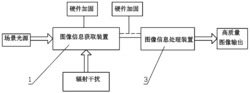
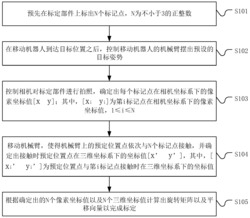
图2是本实用新型所述螺旋型微型机器人的制备过程流程示意图;
图3是本实用新型实施例1中制备得到的螺旋型微型机器人的光学显微镜图;
图4是本实用新型实施例1中批量制备螺旋型微型机器人的中间产物的光学显微镜图;
图5是本实用新型实施例2中制备得到的螺旋型微型机器人的光学显微镜图。
具体实施方式
下面通过具体实施方式来进一步说明本实用新型的技术方案。本领域技术人员应该明了,所述实施例仅仅是帮助理解本实用新型,不应视为对本实用新型的具体限制。
具体实施方式部分所述的螺旋型微型机器人的结构示意图如图1所示,由图1可以看出,所述螺旋型微型机器人为螺旋型片状结构,其体长、半径及螺旋角的尺寸标注如图1中所示。
具体实施方式部分所述的螺旋型微型机器人的制备过程的流程示意图如图2所示;由图2可以看出,所述制备过程包括以下步骤:
(a)在硅片表面涂覆光刻胶层;
(b)将光刻胶层经烘干、紫外曝光、烘干、显影后得到长条形平行四边形的光刻胶层;
(c)在步骤(b)得到的长条形平行四边形的光刻胶层的表面蒸镀金属材料层,之后将其置于N-甲基吡咯烷酮中浸泡,得到所述螺旋型微型机器人。
以下实施例1-4均采用上述制备流程。
实施例1
本实施例所述螺旋型微型机器人的光学显微镜图如图3所示,由图3可以看出,所述螺旋型微型机器人的螺旋角为37.5°,其体长为120μm。
螺旋型微型机器人的制备方法包括以下步骤:
(a)将4mL AZ nLof 2070商用光刻胶倾倒在干净的硅片上,在转速为3000rpm的条件下进行旋涂,所述旋涂的时间为35s,得到厚度为5μm的光刻胶层;
(b)将步骤(a)得到的光刻胶层在100℃的条件下烘烤80s,之后冷却至常温;
(c)将设计的菲林板图案通过紫外曝光的方式印刻在光刻胶层上,紫外曝光的紫外光的波长为365nm,所述紫外光的强度为7.3mW/cm
(d)将Ni薄膜通过电子束蒸镀的方式沉积在步骤(c)得到的长条形平行四边形的光刻胶上,电子束蒸镀的沉积速率为 得到厚度为100nm的Ni材料层;之后将其浸泡在温度为90℃的N-甲基吡咯烷酮中,超声处理40s,之后继续浸泡2天,用乙醇和水清洗,得到所述螺旋型微型机器人。
本实施例批量制备螺旋型微型机器人过程中的中间产物的光学显微图片如图4所示,由图4可以看出,本实施例制备过程中光刻胶层溶胀作用带动Ni材料层一同卷曲,形成螺旋型结构;本实用新型螺旋型微型机器人的制备方法能大批量的制备得到一致性较好的螺旋型微型机器人。
实施例2
本实施例所述螺旋型微型机器人的光学显微镜图如图5所示,由图5可以看出,所述螺旋型微型机器人的螺旋角为29.4°,其体长为135μm。
螺旋型微型机器人的制备方法包括以下步骤:
(a)将5mL AZ nLof 2070商用光刻胶倾倒在干净的硅片上,在转速为4000rpm的条件下进行旋涂,所述旋涂的时间为35s,得到厚度为6μm的光刻胶层;
(b)将步骤(a)得到的光刻胶层在100℃的条件下烘烤90s,之后冷却至常温;
(c)将设计的菲林板图案通过紫外曝光的方式印刻在光刻胶层上,紫外曝光的紫外光的波长为365nm,所述紫外光的强度为7.3mW/cm
(d)将Ni薄膜通过电子束蒸镀的方式沉积在步骤(c)得到的长条形平行四边形的光刻胶上,电子束蒸镀的沉积速率为 得到厚度为90nm的Ni材料层;之后将其浸泡在温度为100℃的N-甲基吡咯烷酮中,超声处理50s,之后继续浸泡2天,用异丙醇和水清洗,得到所述螺旋型微型机器人。
实施例3
本实施例所述螺旋型微型机器人的螺旋角为20°,其体长为40μm。
螺旋型微型机器人的制备方法包括以下步骤:
(a)将3mL AZ nLof 2070商用光刻胶倾倒在干净的硅片上,在转速为4000rpm的条件下进行旋涂,所述旋涂的时间为30s,得到厚度为3μm的光刻胶层;
(b)将步骤(a)得到的光刻胶层在90℃的条件下烘烤60s,之后冷却至常温;
(c)将设计的菲林板图案通过紫外曝光的方式印刻在光刻胶层上,紫外曝光的紫外光的波长为365nm,所述紫外光的强度为7.3mW/cm
(d)将Ni薄膜通过电子束蒸镀的方式沉积在步骤(c)得到的长条形平行四边形的光刻胶上,电子束蒸镀的沉积速率为 得到厚度为80nm的Ni材料层;之后将其浸泡在温度为80℃的N-甲基吡咯烷酮,超声处理90s,之后继续浸泡2天,用异丙醇和水清洗,得到所述螺旋型微型机器人。
实施例4
本实施例所述螺旋型微型机器人的螺旋角为53.5°,其体长为360μm。
螺旋型微型机器人的制备方法包括以下步骤:
(a)将5mL AZ nLof 2070商用光刻胶倾倒在干净的硅片上,在转速为4000rpm的条件下进行旋涂,所述旋涂的时间为45s,得到厚度为8μm的光刻胶层;
(b)将步骤(a)得到的光刻胶层在110℃的条件下烘烤90s,之后冷却至常温;
(c)将设计的菲林板图案通过紫外曝光的方式印刻在光刻胶层上,紫外曝光的紫外光的波长为365nm,所述紫外光的强度为7.3mW/cm
(d)将镍薄膜通过电子束蒸镀的方式沉积在步骤(c)得到的长条形平行四边形的光刻胶上,电子束蒸镀的沉积速率为 得到厚度为150nm的镍材料层;之后将其浸泡在温度为80℃的N-甲基吡咯烷酮,超声处理60s,之后继续浸泡2天,用乙醇和水清洗,得到所述螺旋型微型机器人。
申请人声明,以上所述仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,所属技术领域的技术人员应该明了,任何属于本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,均落在本实用新型的保护范围和公开范围之内。
一种螺旋型微型机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0