






专利摘要
基于藻类细胞机器人的货物可控传输释放方法,包括以下步骤:设计一端可以和藻类细胞粘附,另一端可以和微结构连接的特异性蛋白;利用设计的特异性蛋白对氨基修饰的微结构进行包被;将包被的微结构与藻类细胞注入光引导装置中的微流控芯片中;利用光引导装置实现藻类细胞的机器人化运动控制,接着对藻类细胞与微结构进行有效装配;光引导装置牵引藻类细胞运动,进而实现对货物的可控传输,货物为通过传统MEMS技术加工制作的微结构;待货物传输至目的地,实现藻类细胞对货物的释放。本发明提供了藻类细胞机器人化新方法,以及利用藻类细胞机器人进行微纳操作的新手段,在微纳装配、药物寄送、微尺度环境监测等方面展现出广阔的应用前景。
权利要求
1.基于藻类细胞机器人的货物可控传输释放方法,其特征在于:包括以下步骤,
(1)结合藻类细胞(21)的生物学特性,设计一端和藻类细胞(21)粘附,另一端和微结构(24)连接的特异性蛋白(22);
(2)利用设计的特异性蛋白(22)对氨基修饰的微结构(24)进行包被;
(3)将特异性蛋白(22)包被的微结构(24)与藻类细胞(21)注入光引导装置中的微流控芯片(3)中;
(4)结合藻类细胞(21)的趋光性,利用光引导装置实现藻类细胞(21)的机器人化运动控制,接着对藻类细胞(21)与微结构(24)进行有效装配;
(5)光引导装置牵引藻类细胞(21)运动,进而实现对货物的可控传输,货物为通过传统MEMS技术加工制作的微结构(24);
(6)待货物传输至目的地,利用光化学方式,计算机(17)将控制指令传递给光源控制器(14),打开释放光源(19),照射藻类细胞(21)与微结构(24)集成设备,特异性蛋白(22)中设计的光敏基团(23)打开相应的化学键,实现藻类细胞(21)对货物的释放;
步骤(1)中特异性蛋白(22)为一种4-羟基脯氨酸糖肽,该特异性蛋白(22)的一端以非共价键的方式和藻类细胞(21)的细胞壁连接,另一端和氨基修饰的微结构(24)连接,经过特异性蛋白(22)包被的微结构(24)很容易和藻类细胞(21)粘附。
2.根据权利要求1所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:光引导装置包括运动控制装置、图像获取和处理系统、微流控芯片(3)、样品平台、引导光源(18)、释放光源(19)、光源夹持装置(20)和光学平台(13);
运动控制装置包含转动平台(10)、水平位移平台(9)、垂直位移平台(7)、摆动平台(8)、转接板(11)、支撑杆(12)和四轴控制器(15),转接板(11)通过四根所述的支撑杆(12)固定于光学平台(13)上,转动平台(10)水平设置在转接板(11)上,水平位移平台(9)设置在转动平台(10)上,垂直位移平台(7)设置在水平位移平台(9)上,摆动平台(8)设在垂直位移平台(7)的侧部;
光源夹持装置(20)设置在摆动平台(8)上,光源夹持装置(20)为圆盘形结构,光源夹持装置(20)上设置有两个中心对称的夹持孔,引导光源(18)和释放光源(19)分别夹持在两个夹持孔内;
转动平台(10)、转接板(11)和光源夹持装置(20)的中央均为上下通透的空心结构;
图像获取和处理系统包括CCD 相机(1)、正置显微镜(2)和计算机(17),CCD 相机(1)安装于正置显微镜(2)的上方,正置显微镜(2)通过水平连接杆以及垂直立柱固定于光学平台(13)上;CCD 相机(1)和正置显微镜(2)通过数据线与计算机(17)连接;
样品平台包括三维纳米平台(6)、转接杆件(5)、样品托(4)和三轴控制器(16);三维纳米平台(6)置于转动平台(10)下方并固定于光学平台(13)上,转接杆件(5)为圆柱形中空管,转接杆件(5)向上穿过转接板(11)、转动平台(10)和光源夹持装置(20)的空心结构,转接杆件(5)下端通过螺栓结构固定连接在三维纳米平台(6)上,样品托(4)固定连接到转接杆件(5)的上端,样品托(4)位于正置显微镜(2)下方和光源夹持装置(20)上方之间,在样品托(4)顶部设置有正方形凹槽,微流控芯片(3)放置到正方形凹槽内;
计算机(17)通过光源控制器(14)与释放光源(19)连接,计算机(17)通过所述的四轴控制器(15)分别与转动平台(10)、水平位移平台(9)、垂直位移平台(7)和摆动平台(8)连接,计算机(17)通过所述的三轴控制器(16)与三维纳米平台(6)连接。
3.根据权利要求2所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:微流控芯片(3)包含三层结构,三层结构从上往下依次为:聚二甲基硅氧烷微结构层、 PDMS中间层和玻璃基底;所述的正方形凹槽的深度小于等于玻璃基底的厚度。
4.根据权利要求2所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:引导光源(18)为波长 500 nm 的 LED 光源,工作电压和工作电流分别为 3 V 和 0.3 A;释放光源(19)为波长365nm的紫外光源。
5.根据权利要求3所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:步骤(4)中藻类细胞(21)的机器人化运动控制过程为,
操作者通过计算机(17)给光引导装置施加控制命令,光引导装置中的运动控制装置在收到操作者的指令后,控制引导光源(18)移动到指定的位置,微流控芯片(3)中的藻类细胞(21)在检测到引导光源(18)刺激后会快速做出响应,沿着引导光源(18)方向或者逆着引导光源(18)方向运动,同时将基于图像的反馈提供给计算机(17),操作者根据需要进一步调整引导光源(18)的位置,藻类细胞(21)时刻检测不断变化的光源信号,调整自己的运动方向;这样就实现对藻类细胞(21)运动的精确控制;待藻类细胞(21)完成路径A的运动后,通过操控运动控制装置调整引导光源(18)的位置,引导藻类细胞(21)按照路径B运动,这样逐步控制藻类细胞(21)完成A-B-C-D矩形轨迹运动;按照同样的方式控制藻类细胞机器人在二维平面沿着事先规划好的任意轨迹运动,即实现藻类细胞(21)的机器人化运动控制。
6.根据权利要求5所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:运动控制装置中的转动平台(10)、水平位移平台(9)、垂直位移平台(7)、摆动平台(8)可同时独立工作,进而保证引导光源(18)指向任一水平面的任意方向,控制指令通过计算机(17)传递给四轴控制器(15),进一步精确地实现运动控制装置不同的运动形式。
7.根据权利要求5所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:步骤(4)中藻类细胞(21)与微结构(24)的有效装配的具体过程为,
操作者通过计算机(17)给光引导装置施加控制命令,光引导装置控制藻类细胞移动至特异性蛋白(22)包被后的微结构(24)所在位置,与特异性蛋白(22)包被后的微结构(24)碰撞,发生有效粘附,完成藻类细胞(21)与微结构(24)装配。
8.根据权利要求7所述的基于藻类细胞机器人的货物可控传输释放方法,其特征在于:步骤(6)中货物的释放的过程为:光引导装置牵引藻类细胞(21)的机器人运动,进而实现对货物的可控传输,待货物传输至目的地,利用计算机(17)将控制指令传递给光源控制器(14),打开释放光源(19),照射藻类细胞(21)与微结构(24)集成设备,实现藻类细胞(24)对货物的释放。
说明书
技术领域
本发明属于机器人技术领域,尤其涉及一种基于藻类细胞机器人的货物可控传输释放方法。
背景技术
细胞是构成生物的最基本单元,然而由小小的细胞构成的生物驱动却可以驱动小至昆虫,大至上百吨重的鲸鱼(蓝鲸150吨重)。相比于现有的机电驱动方式,生物驱动显示了巨大的优势:能量转化效率高,尺寸小,自供能。如果将生物细胞用来驱动非生命的功能部件,将有望结合生物驱动的优势发展出类生命机械。因此以活体生物细胞来构建新的驱动方式成为近期的研究热点。
目前可用于生物驱动的生物细胞主要包括两类:肌肉细胞和微生物。肌肉细胞通过自然收缩或电刺激收缩来驱动一些结构。微生物可以在液体中灵活游动,可用来推动颗粒等微结构在小尺度空间运动。然而现有生物驱动中,如何实现生物细胞和微结构有效粘附和释放仍是一项挑战。如何对生物细胞和微结构集成设备进行有效控制都是待攻克的问题。
藻类细胞是一类重要的微生物,具有感知和驱动能力,能够从周围环境中获取能量,并高效地将化学能转化为鞭毛的机械能,可根据外界的刺激产生相应运动,如果能够实现藻类细胞的机器人化运动,实现藻类细胞与非生命功能部件的有效粘附和释放,以及对非生命的功能部件的可控驱动,必将在药物输运,靶向治疗等方面展现出广阔的应用前景。
发明内容
本发明为了解决现有技术中的不足之处,提供一种基于藻类细胞机器人的货物可控传输释放方法,该方法结合藻类细胞的趋光性,利用光引导装置实现藻类细胞机器人化运动控制。通过对货物进行特异性蛋白包被,结合光引导方式,实现藻类细胞机器人与待传输货物的有效装配。利用光引导装置牵引藻类细胞机器人运动,实现对货物的可控传输。待货物传输至目的地,利用光化学方式,通过释放光源照射藻类细胞机器人与微结构集成设备,将货物释放至目标点,再次回收和利用藻类细胞机器人。
为解决上述技术问题,本发明采用如下技术方案:基于藻类细胞机器人的货物可控传输释放方法,包括以下步骤,
(1)结合藻类细胞21的生物学特性,设计一端可以和藻类细胞21粘附,另一端可以和微结构24连接的特异性蛋白22;
(2)利用设计的特异性蛋白22对氨基修饰的微结构24进行包被;
(3)将特异性蛋白22包被的微结构24与藻类细胞21注入光引导装置中的微流控芯片3中;
(4)结合藻类细胞21的趋光性,利用光引导装置实现藻类细胞21的机器人化运动控制,接着对藻类细胞21与微结构24进行有效装配;
(5)光引导装置牵引藻类细胞21运动,进而实现对货物的可控传输,货物为通过传统MEMS技术加工制作的微结构24;
(6)待货物传输至目的地,利用光化学方式,计算机17将控制指令传递给光源控制器14,打开释放光源19,照射藻类细胞21与微结构24集成设备,特异性蛋白22中设计的光敏集团23打开相应的化学键,实现藻类细胞21对货物的释放。
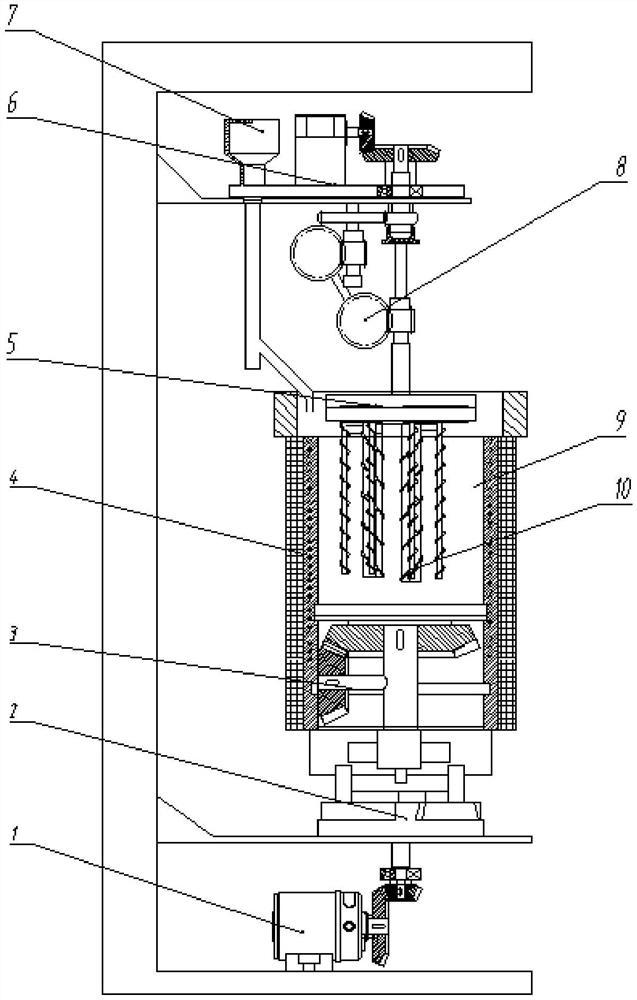
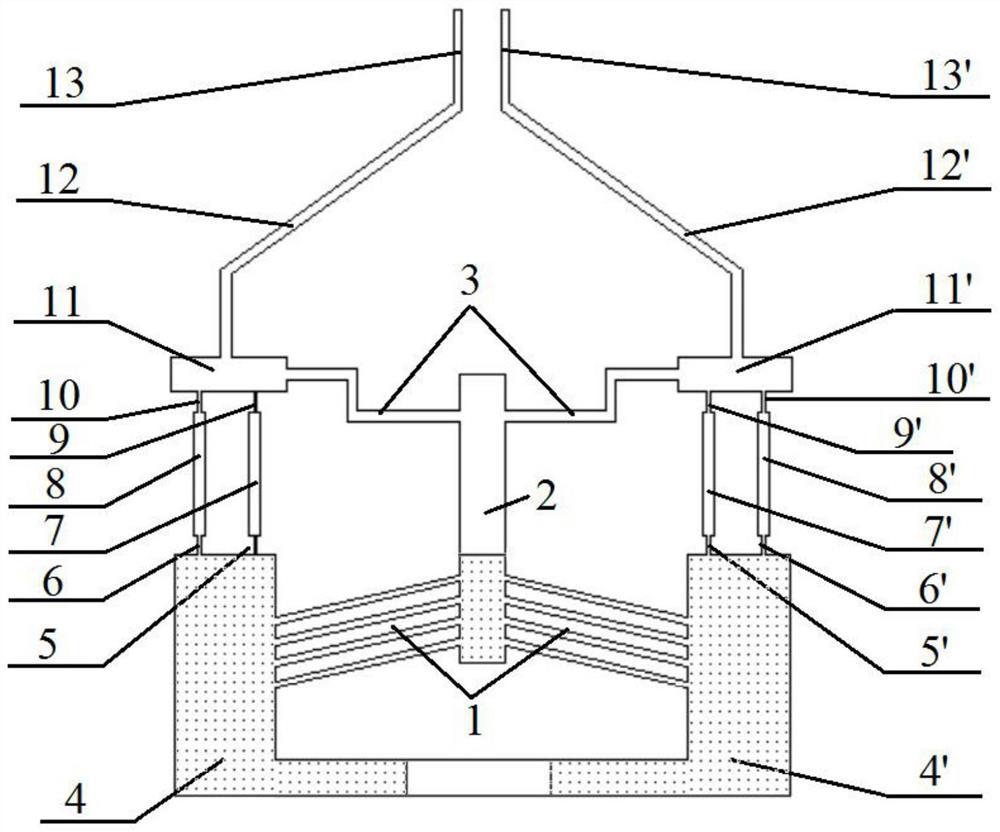
光引导装置包括运动控制装置、图像获取和处理系统、微流控芯片3、样品平台、引导光源18、释放光源19、光源夹持装置20和光学平台13;
运动控制装置包含转动平台10、水平位移平台9、垂直位移平台7、摆动平台8、转接板11、支撑杆12和四轴控制器15,转接板11通过四根所述的支撑杆12固定于光学平台13上,转动平台10水平设置在转接板11上,水平位移平台9设置在转动平台10上,垂直位移平台7设置在水平位移平台9上,摆动平台8设在垂直位移平台7的侧部;
光源夹持装置20设置在摆动平台8上,光源夹持装置20为圆盘形结构,光源夹持装置20上设置有两个中心对称的夹持孔,引导光源18和释放光源19分别夹持在两个夹持孔内;
转动平台10、转接板11和光源夹持装置20的中央均为上下通透的空心结构;
图像获取和处理系统包括CCD 相机1、正置显微镜2和计算机17,CCD 相机1安装于正置显微镜2的上方,正置显微镜2通过水平连接杆以及垂直立柱固定于光学平台13上;CCD 相机1和正置显微镜2通过数据线与计算机17连接;
样品平台包括三维纳米平台6、转接杆件5、样品托4和三轴控制器16。三维纳米平台6置于转动平台10下方并固定于光学平台13上,转接杆件5为圆柱形中空管,转接杆件5向上穿过转接板11、转动平台10和光源夹持装置20的空心结构,转接杆件5下端通过螺栓结构固定连接在三维纳米平台6上,样品托4固定连接到转接杆件5的上端,样品托4位于正置显微镜2下方和光源夹持装置20上方之间,在样品托4顶部设置有正方形凹槽,微流控芯片3放置到正方形凹槽内;
计算机17通过光源控制器14与释放光源19连接,计算机17通过所述的四轴控制器15分别与转动平台10、水平位移平台9、垂直位移平台7和摆动平台8连接,计算机17通过所述的三轴控制器16与三维纳米平台6连接。
微流控芯片3包含三层结构,三层结构从上往下依次为:聚二甲基硅氧烷微结构层、 PDMS 中间层和玻璃基底;所述的正方形凹槽的深度小于等于玻璃基底的厚度。
引导光源18为波长 500 nm 的 LED 光源,工作电压和工作电流分别为 3 V 和0.3 A;释放光源19为波长365nm的紫外光源。
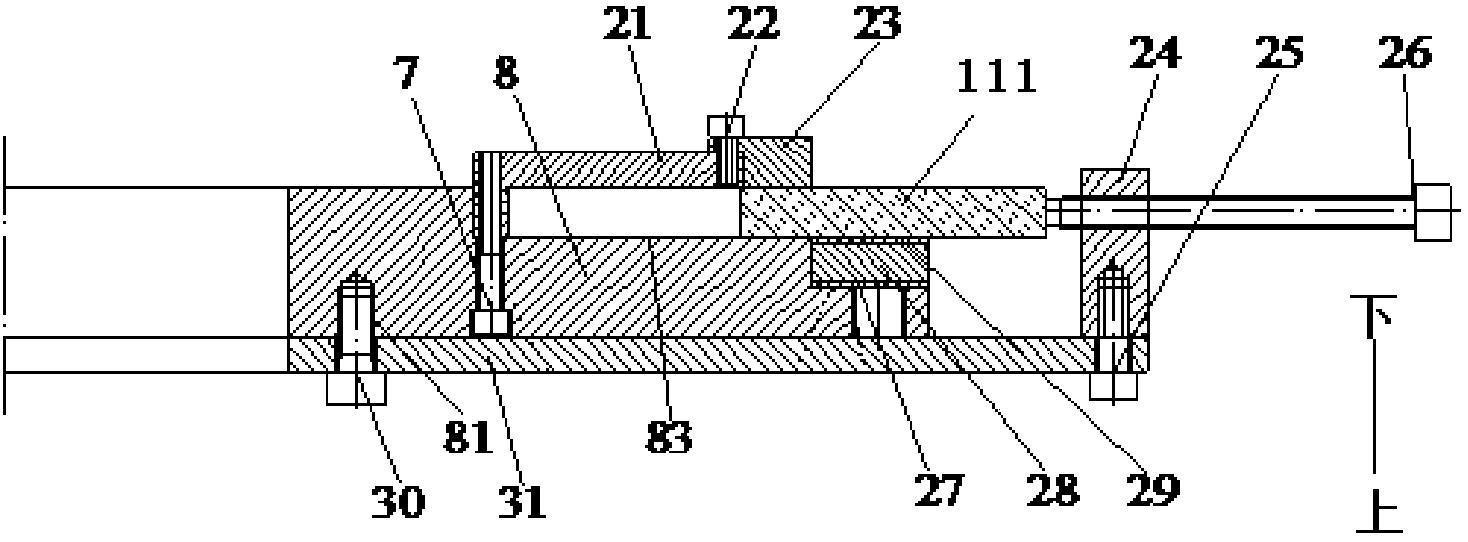
步骤(1)中特异性蛋白22为一种4-羟基脯氨酸糖肽,该特异性蛋白22的一端以非共价键的方式和藻类细胞21的细胞壁连接,另一端和氨基修饰的微结构24连接,经过特异性蛋白22包被的微结构24很容易和藻类细胞21粘附。
步骤(4)中藻类细胞21的机器人化运动控制过程为,
操作者可以通过计算机17给光引导装置施加控制命令,光引导装置中的运动控制装置在收到操作者的指令后,控制引导光源18移动到指定的位置,微流控芯片3中的藻类细胞21在检测到引导光源18刺激后会快速做出响应,沿着引导光源18方向或者逆着引导光源18方向运动,同时将基于图像的反馈提供给计算机17,操作者根据需要进一步调整引导光源18的位置,藻类细胞21时刻检测不断变化的光源信号,调整自己的运动方向。这样就可以实现对藻类细胞21运动的精确控制;待藻类细胞21完成路径A的运动后,通过操控运动控制装置调整引导光源18的位置,引导藻类细胞21按照路径B运动,这样逐步控制藻类细胞21完成A-B-C-D矩形轨迹运动;按照同样的方式可以控制藻类细胞机器人在二维平面沿着事先规划好的任意轨迹运动,即实现藻类细胞21的机器人化运动控制。
运动控制装置中的转动平台10、水平位移平台9、垂直位移平台7、摆动平台8可同时独立工作,进而保证引导光源18指向任一水平面的任意方向,控制指令通过计算机17传递给四轴控制器15,进一步可以精确地实现运动控制装置不同的运动形式。
步骤(4)中藻类细胞21与微结构24的有效装配的具体过程为,
操作者通过计算机17给光引导装置施加控制命令,光引导装置控制藻类细胞移动至特异性蛋白22包被后的微结构24所在位置,与特异性蛋白22包被后的微结构24碰撞,发生有效粘附,完成藻类细胞21与微结构24装配。
步骤(6)中的光化学方式为在4-羟基脯氨酸糖肽中可以加入某些特殊的光敏基团23,光敏基团23在外界特定波长的光源照射下能够打开相应的化学键,这样既可以实现微结构24和藻类细胞21粘附,同时又能实现藻类细胞21对微结构24的可控释放。
步骤(6)中货物的释放的过程为:光引导装置牵引藻类细胞21的机器人运动,进而实现对货物的可控传输,待货物传输至目的地,利用计算机17将控制指令传递给光源控制器14,打开释放光源19,照射藻类细胞21与微结构24集成设备,实现藻类细胞24对货物的释放。
采用上述技术方案,正置显微镜获取藻类细胞的图像通过 USB 传递到计算机进行处理和分析。CCD 相机的采样率可以达到 30 fps,正置显微镜的放大倍数可以达到 400倍。
微流控芯片PDMS微结构层拓扑结构可由商业化的软件进行数字化设计,经过亲水处理的PDMS中间层起到防止细胞与微流控芯片黏连的作用,微流控芯片可设计为开口类型或封闭类型,藻类细胞溶液可以通过微流控芯片的入口注入到微流控芯片中。
计算机将控制命令传递给三轴控制器,进一步实现样品平台的精确可控运动,样品平台可以保证被观测物体(藻类细胞)灵敏地移动到正置显微镜的视野中央。
货物的材料多采用一些生物兼容材料,更有益于将该发明技术应用于生物医疗等领域。
综上所述,本发明具有以下技术效果:
本发明结合藻类细胞的趋光性,利用开发的光引导装置,控制藻类细胞如同微型机器人一样沿着任意轨迹进行运动。利用特异性蛋白对加工制作的货物进行包被,结合开发的光引导装置,牵引藻类细胞机器人运动,完成藻类细胞机器人和货物可控装配。进一步控制藻类细胞机器人传输货物至目标点,待货物至目标点,利用光化学方式,通过释放光源照射藻类细胞机器人与微结构集成设备,实现货物的可控释放,回收和再次利用藻类细胞机器人。该方法可实现藻类细胞的机器人化运动以及藻类细胞机器人对货物的装配、传输、释放一体化功能,藻类细胞机器人的再次回收利用。
本发明提供了一种藻类细胞机器人化新方法,以及利用藻类细胞机器人进行微纳操作的新手段,在微纳装配、药物寄送、微尺度环境监测等方面展现出广阔的应用前景。
附图说明
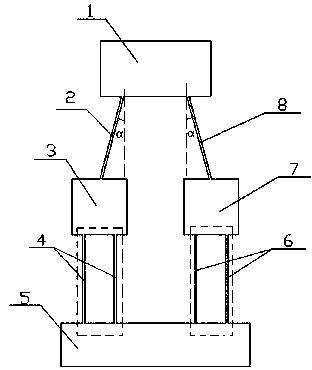
图1为本发明中光引导装置示意图;
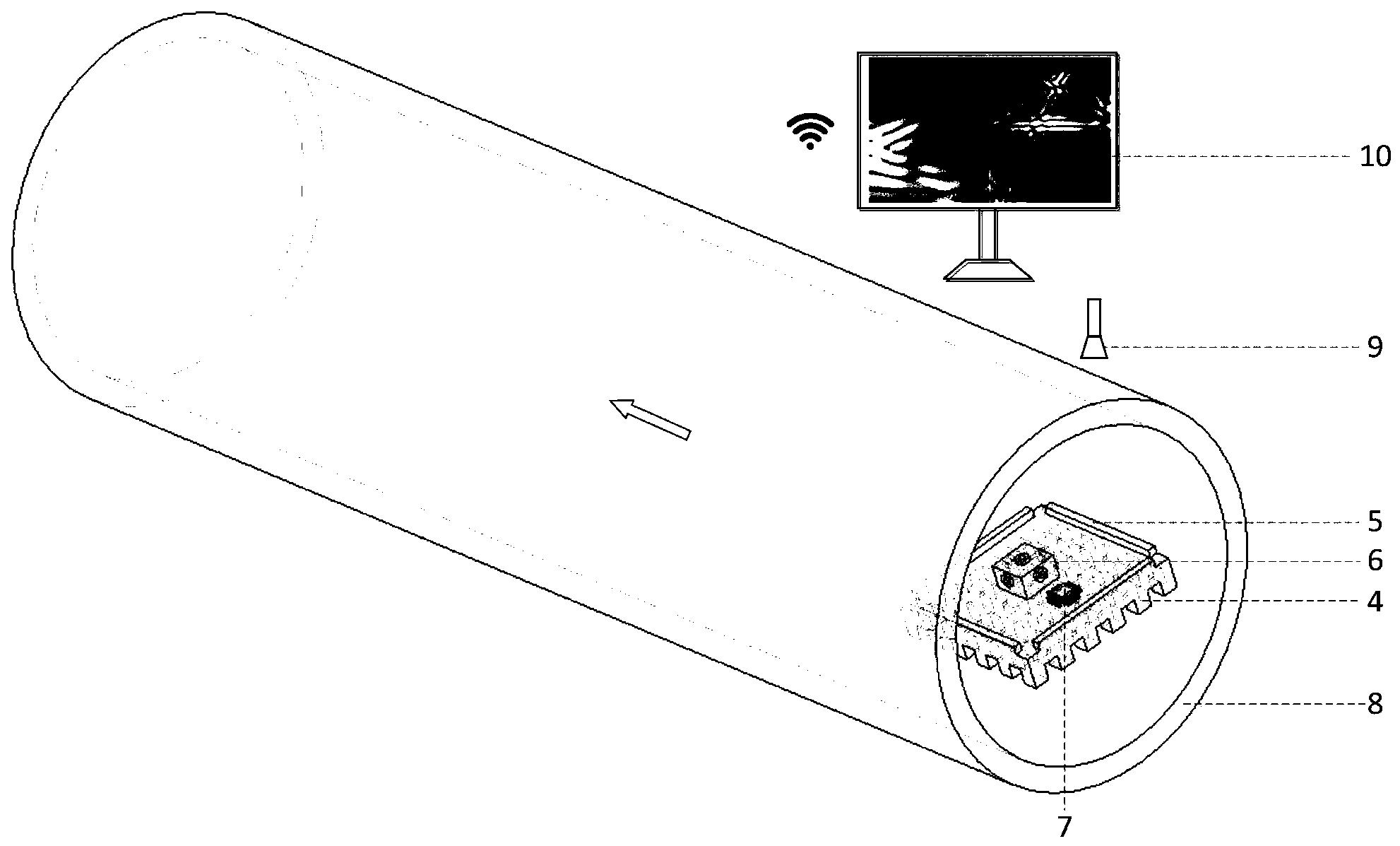
图2为光引导装置控制藻类细胞按矩形轨迹运动示意图;
图3为特异性蛋白的结构图;
图4为藻类细胞通过光化学方式释放货物示意图。
具体实施方式
如图1-图4所示,本发明的基于藻类细胞机器人的货物可控传输释放方法,包括以下步骤,
(1)结合藻类细胞21的生物学特性,设计一端可以和藻类细胞21粘附,另一端可以和微结构24连接的特异性蛋白22;
(2)利用设计的特异性蛋白22对氨基修饰的微结构24进行包被;
(3)将特异性蛋白22包被的微结构24与藻类细胞21注入光引导装置中的微流控芯片3中;
(4)结合藻类细胞21的趋光性,利用光引导装置实现藻类细胞21的机器人化运动控制,接着对藻类细胞21与微结构24进行有效装配;
(5)光引导装置牵引藻类细胞21运动,进而实现对货物的可控传输,货物为通过传统MEMS技术加工制作的微结构24;
(6)待货物传输至目的地,利用光化学方式,计算机17将控制指令传递给光源控制器14,打开释放光源19,照射藻类细胞21与微结构24集成设备,特异性蛋白22中设计的光敏集团23打开相应的化学键,实现藻类细胞21对货物的释放。
光引导装置包括运动控制装置、图像获取和处理系统、微流控芯片3、样品平台、引导光源18、释放光源19、光源夹持装置20和光学平台13;
运动控制装置包含转动平台10、水平位移平台9、垂直位移平台7、摆动平台8、转接板11、支撑杆12和四轴控制器15,转接板11通过四根所述的支撑杆12固定于光学平台13上,转动平台10水平设置在转接板11上,水平位移平台9设置在转动平台10上,垂直位移平台7设置在水平位移平台9上,摆动平台8设在垂直位移平台7的侧部;
光源夹持装置20设置在摆动平台8上,光源夹持装置20为圆盘形结构,光源夹持装置20上设置有两个中心对称的夹持孔,引导光源18和释放光源19分别夹持在两个夹持孔内;
转动平台10、转接板11和光源夹持装置20的中央均为上下通透的空心结构;
图像获取和处理系统包括CCD 相机1、正置显微镜2和计算机17,CCD 相机1安装于正置显微镜2的上方,正置显微镜2通过水平连接杆以及垂直立柱固定于光学平台13上;CCD 相机1和正置显微镜2通过数据线与计算机17连接;
样品平台包括三维纳米平台6、转接杆件5、样品托4和三轴控制器16。三维纳米平台6置于转动平台10下方并固定于光学平台13上,转接杆件5为圆柱形中空管,转接杆件5向上穿过转接板11、转动平台10和光源夹持装置20的空心结构,转接杆件5下端通过螺栓结构固定连接在三维纳米平台6上,样品托4固定连接到转接杆件5的上端,样品托4位于正置显微镜2下方和光源夹持装置20上方之间,在样品托4顶部设置有正方形凹槽,微流控芯片3放置到正方形凹槽内;
计算机17通过光源控制器14与释放光源19连接,计算机17通过所述的四轴控制器15分别与转动平台10、水平位移平台9、垂直位移平台7和摆动平台8连接,计算机17通过所述的三轴控制器16与三维纳米平台6连接。
微流控芯片3包含三层结构,三层结构从上往下依次为:聚二甲基硅氧烷微结构层、 PDMS 中间层和玻璃基底;所述的正方形凹槽的深度小于等于玻璃基底的厚度。
引导光源18为波长 500 nm 的 LED 光源,工作电压和工作电流分别为 3 V 和0.3 A;释放光源19为波长365nm的紫外光源。
步骤(1)中特异性蛋白22为一种4-羟基脯氨酸糖肽,该特异性蛋白22的一端以非共价键的方式和藻类细胞21的细胞壁连接,另一端和氨基修饰的微结构24连接,经过特异性蛋白22包被的微结构24很容易和藻类细胞21粘附。
步骤(4)中藻类细胞21的机器人化运动控制过程为,
操作者可以通过计算机17给光引导装置施加控制命令,光引导装置中的运动控制装置在收到操作者的指令后,控制引导光源18移动到指定的位置,微流控芯片3中的藻类细胞21在检测到引导光源18刺激后会快速做出响应,沿着引导光源18方向或者逆着引导光源18方向运动,同时将基于图像的反馈提供给计算机17,操作者根据需要进一步调整引导光源18的位置,藻类细胞21时刻检测不断变化的光源信号,调整自己的运动方向。这样就可以实现对藻类细胞21运动的精确控制;待藻类细胞21完成路径A的运动后,通过操控运动控制装置调整引导光源18的位置,引导藻类细胞21按照路径B运动,这样逐步控制藻类细胞21完成A-B-C-D矩形轨迹运动;按照同样的方式可以控制藻类细胞机器人在二维平面沿着事先规划好的任意轨迹运动,即实现藻类细胞21的机器人化运动控制。
运动控制装置中的转动平台10、水平位移平台9、垂直位移平台7、摆动平台8可同时独立工作,进而保证引导光源18指向任一水平面的任意方向,控制指令通过计算机17传递给四轴控制器15,进一步可以精确地实现运动控制装置不同的运动形式。
步骤(4)中藻类细胞21与微结构24的有效装配的具体过程为,
操作者通过计算机17给光引导装置施加控制命令,光引导装置控制藻类细胞移动至特异性蛋白22包被后的微结构24所在位置,与特异性蛋白22包被后的微结构24碰撞,发生有效粘附,完成藻类细胞21与微结构24装配。
步骤(6)中的光化学方式为在4-羟基脯氨酸糖肽中可以加入某些特殊的光敏基团23,光敏基团23在外界特定波长的光源照射下能够打开相应的化学键,这样既可以实现微结构24和藻类细胞21粘附,同时又能实现藻类细胞21对微结构24的可控释放。
步骤(6)中货物的释放的过程为:光引导装置牵引藻类细胞21的机器人运动,进而实现对货物的可控传输,待货物传输至目的地,利用计算机17将控制指令传递给光源控制器14,打开释放光源19,照射藻类细胞21与微结构24集成设备,实现藻类细胞24对货物的释放。
本实施例并非对本发明的形状、材料、结构等作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本发明技术方案的保护范围。
基于藻类细胞机器人的货物可控传输释放方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0