

IPC分类号 : B23H5/00I,B23H5/14I,B23H11/00I,B23K9/04I,B23K9/16I,B33Y30/00I









专利摘要
本发明公开了一种基于放电加工的多功能集成制造系统,包括机器人、运动控制单元、多功能复合放电电源、工作介质供给回收单元、送丝装置、工具头快换夹持单元、放电加工工具头、焊接工具头、检测工具头和工作台。系统以机器人为执行机构,实现包括电弧增材成形、微细电火花沉积成形在内的放电增材制造,包括电弧高效加工、电火花精密加工在内的放电减材加工,基于电弧堆焊的零件连接,以及基于光学扫描和超声探伤的在线检测功能。本发明集成度高,涵盖了难加工材料和微小尺寸零部件的加工制造,并兼具高效和精密的加工特点。发明可在多种介质中实施,摆脱了环境的限制,适用范围广,在太空、深海等极端环境具有很强的应用前景。
权利要求
1.一种基于放电加工的多功能集成制造系统,系统包括机器人(1)、运动控制单元(2)、多功能复合放电电源(4)、工作介质供给回收单元(5)、快换夹持单元(6)和工作台(11),其中,运动控制单元(2)与机器人(1)连接,运动控制单元(2)控制机器人(1)的加工进给路径,快换夹持单元(6)安装于机器人(1)末端,工件(10)紧固在工作台(11)上,多功能复合放电电源(4)的正极或负极与工作台(11)相连,多功能复合放电电源(4)的负极或正极与快换夹持单元(6)相连,工作介质供给回收单元(5)的出口端与快换夹持单元(6)连接,工作介质供给回收单元(5)的入口端与工作台(11)连接,工作介质供给回收单元(5)为加工过程提供工作介质,其特征在于:系统还包括:
用于放电减材加工的放电加工工具头(7);
用于放电增材制造和零件连接的送丝装置(3)和焊接工具头(8);
用于在线检测的检测工具头(9);
所述放电加工工具头(7)、焊接工具头(8)或检测工具头(9)根据需要可相互替换的装夹在所述快换夹持单元(6)上;
放电减材加工功能利用电弧高效加工方法和电火花精密加工方法实现;
放电增材制造功能利用电弧增材成形方法和微细电火花沉积成形方法实现;
零件连接功能利用电弧堆焊方法实现;
在线检测功能是指利用光学扫描实现零件三维形状和表面质量的检测或超声方法实现加工后零件的探伤检测。
2.根据权利要求1所述的多功能集成制造系统,其特征在于:在放电加工工具头(7)和工件(10)之间形成放电加工所需的放电回路,通过配合使用机器人(1)、运动控制单元(2)、多功能复合放电电源(4)、工作介质供给回收单元(5)、快换夹持单元(6)、放电加工工具头(7)和工作台(11),在工件(10)上实现放电减材加工功能。
3.根据权利要求1所述的多功能集成制造系统,其特征在于:送丝装置(3)将电极丝输送到快换夹持单元(6),并最终进入焊接工具头(8),在焊接工具头(8)和工件(10)之间形成放电加工所需的放电回路,通过配合使用机器人(1)、运动控制单元(2)、送丝装置(3)、多功能复合放电电源(4)、工作介质供给回收单元(5)、快换夹持单元(6)、焊接工具头(8)和工作台(11),实现放电增材制造和零件连接功能。
4.根据权利要求1所述的多功能集成制造系统,其特征在于:通过配合使用机器人(1)、运动控制单元(2)、快换夹持单元(6)、检测工具头(9)和工作台(11),实现对工件(10)的在线检测功能。
5.根据权利要求1所述的多功能集成制造系统,其特征在于:所述多功能复合放电电源(4)为放电电流在0.1-1000A范围内可调、脉宽和脉间在0.1μs-100ms可调的脉冲电源或者直流电源,所述多功能复合放电电源(4)具有5档电源参数输出模式,5档电源参数输出模式分别用于电弧高效加工、电火花精密加工、电弧增材成形、电弧堆焊、微细电火花沉积成形。
6.根据权利要求1所述的多功能集成制造系统,其特征在于:所述快换夹持单元(6)的尾部配备快速接头,通过所述快速接头实现放电加工工具头(7)、焊接工具头(8)或检测工具头(9)的快速装夹和替换。
7.根据权利要求1所述的多功能集成制造系统,其特征在于:所述快换夹持单元(6)具有与放电电源(4)、送丝装置(3)、工作介质供给回收单元(5)连接的接口,通过所述接口的连接,为安装在快换夹持单元(6)末端的放电加工工具头(7)或焊接工具头(8)加载放电电源、电极丝输送和工作介质的供给。
8.根据权利要求1所述的多功能集成制造系统,其特征在于:所述工作介质供给回收单元(5)供给的工作介质包括水基工作液、油基工作液、空气、雾介质或焊接保护气体,所述工作介质的供给压力范围为0-10MPa,且在所述工作介质供给回收单元(5)内部设置过滤单元实现工作介质循环过滤。
说明书
技术领域
本发明属于机械加工与制造领域,尤其涉及一种基于放电加工的多功能集成制造系统。
背景技术
现代制造技术可以分为增材制造(3D打印等)、减材制造(切削加工、特种加工等)和等材制造(塑性成形),前两者是制备零件的最重要手段。增材制造可将金属粉末或金属丝进行熔化堆积成形,原材料形状简单、便于存储和运输,可根据实际涉及打印出所需的形状。而减材制造是目前最常用的加工手段,其中切削加工是采用车、铣、刨、磨等方法将毛坯余量去除而获得具有较高精度的零部件,而特种加工是采用电、热、化学等手段去除材料的加工方法。研制同时具有增材、减材制造能力的多功能集成制造系统,对于提升制造装备水平具有重要意义。
日本山崎马扎克公司开发了一款将金属3D打印机的积层造型与加工中心的切削加工融合于一体的加工机(“INTERREX i AM”系列)。该设备采用激光烧结金属粉末的方法进行3D近成形打印,进而进行切削加工获得所需工件。而由于铝合金对激光的吸收率低,该方法并不擅长进行铝合金工件的打印。同时,该设备采用传统的机床架构,无法借助机器人实现加工,可加工零件的尺寸不大,且效率非常低。加上激光头的寿命有限且激光的光电转换效率偏低(大功率<10%,小功率<30%),整个系统的制造成本、加工成本和维护成本都居高不下。
王克鸿等在专利CN108145332A中公开了一种机器人电弧增减材成形装置及方法。该方法利用CAD技术为待加工产品建立相应的三维模型,获得加工控制信息代码,然后依次利用机器人电弧增材、激光切割减材复合加工的方法,按照设定好的路径,对产品进行加工,得到所需要的零件。该方法采用的减材加工方案为激光切割,只能实现简单轮廓加工,而对于复杂形貌工件则需借助其他加工设备完成,同时激光加工对工件厚度尺寸有较大限制。电弧增材适用于普通宏观尺寸特征的加工,而无法实现微小尺寸零件的加工。此外,激光发生器的成本高、体积大,光热转换效率低也制约着该技术在航海、航天等极端工作环境中的应用。
肖文磊等在专利CN105574254A中提出了一种增减材复合加工系统和方法,系统包括机器人、控制部、电弧增材设备、减材设备。其采用的减材方法为利用机械铣削的方式去除工件材料,能够实现工件的高精度加工,但所能加工的工件材料范围有限,对于航海、航天等特殊环境大量采用的以高温合金、钛合金以及复合材料为代表的难切削加工材料存在加工成本高、加工效率低的问题;此外,铣削过程中存在切削力,导致薄壁类零件加工过程中常出现加工变形等缺陷,刀具损耗严重,需要携带大量不同种类型刀具方能满足加工要求。进一步的,受限于电弧增材的技术特点,该复合加工系统无法实现微小尺寸零件的增材制造。
综上所述,现有的增减材集成制造系统功能集成度不高,系统的增材制造功能无法实现微小尺寸零部件的加工制造,而减材制造功能则存在加工特征有限或面对难加工材料时加工成本高、加工效率低、需要大量更换刀具等问题。
发明内容
为了克服现有技术的不足,本发明的目的在于提供一种基于放电加工的多功能集成制造系统。
发明原理和目的:发明目的在于提供一种新型的增减材及检测多功能集成制造系统。发明原理为:以机器人为平台,依托放电加工技术可实现包括电弧增材成形、微细电火花沉积成形在内的放电增材制造功能,包括电弧高效加工、电火花精密加工在内的放电减材加工功能,基于电弧堆焊的零件连接功能以及基于光学扫描和超声探伤的在线检测功能的集成制造系统。微细电火花沉积成形可以实现微小尺寸零部件的增材制造,因此本发明中的增材制造功能同时兼顾了微小尺寸和普通宏观尺寸,而减材加工功能则分别利用电弧加工快速去除材料、电火花加工进行小余量精加工,这两种方法都是利用放电形成的高温等离子体热蚀除工件表面材料,加工性能不受工件材料强度和硬度的影响,因此在面对难加工材料时,也能取得良好的加工效果。光学扫描检测可以较准确的获得被加工表面的尺寸精度,并用于调整加工参数和策略,超声探伤检测可及时发现加工工件的表面及内部缺陷,保证加工零部件质量。
本发明的目的采用以下技术方案实现:
一种基于放电加工的多功能集成制造系统,系统包括机器人、运动控制单元、多功能复合放电电源、工作介质供给回收单元、工具头快换夹持单元和工作台,其中,运动控制单元与机器人连接,运动控制单元控制机器人的加工进给路径,工具头快换夹持单元安装于机器人末端,工件紧固在工作台上,多功能复合放电电源的正极(或负极)与工作台相连,多功能复合放电电源的负极(或正极)与快换夹持单元相连,工作介质供给回收单元的出口端与快换夹持单元连接,工作介质供给回收单元的入口端与工作台连接,工作介质供给回收单元为加工过程提供工作介质,系统还包括:用于放电减材加工的放电加工工具头;用于放电增材制造和零件连接的送丝装置和焊接工具头;用于在线检测的检测工具头;所述放电加工工具头、焊接工具头或检测工具头根据需要可相互替换的装夹在所述快换夹持单元上。
优选的,在放电加工工具头和工件之间形成放电加工所需的放电回路,通过配合使用机器人、运动控制单元、多功能复合放电电源、工作介质供给回收单元、工具头快换夹持单元、放电加工工具头和工作台,在工件上实现放电减材加工功能。
优选的,利用电弧高效加工方法和电火花精密加工方法实现所述放电减材加工功能。
优选的,送丝装置将电极丝输送到快换夹持单元,并最终进入焊接工具头,在焊接工具头和工件之间形成放电加工所需的放电回路,通过配合使用机器人、运动控制单元、送丝装置、多功能复合放电电源、工作介质供给回收单元、工具头快换夹持单元、焊接工具头和工作台,实现放电增材制造和零件连接功能。
优选的,利用电弧增材成形方法和微细电火花沉积成形方法实现所述放电增材制造功能,利用电弧堆焊方法实现所述零件连接功能。
优选的,通过配合使用机器人、运动控制单元、工具头快换夹持单元、检测工具头和工作台,实现对工件的在线检测功能。
优选的,所述在线检测功能是指利用光学扫描实现零件三维形状和表面质量的检测或超声方法实现加工后零件的探伤检测。
优选的,所述多功能复合放电电源为放电电流在0.1-1000A范围内可调、脉宽和脉间在0.1μs-100ms可调的脉冲电源或者直流电源,所述多功能复合放电电源具有5档电源参数输出模式,5档电源参数输出模式分别用于电弧高效加工、电火花精密加工、电弧增材成形、电弧堆焊、微细电火花沉积成形。
优选的,所述工具头快换夹持单元的尾部配备快速接头,通过所述快速接头实现放电加工工具头、焊接工具头或检测工具头的快速装夹和替换。
优选的,所述工具头快换夹持单元具有与放电电源、送丝装置、工作介质供给回收单元连接的接口,通过所述接口的连接,为安装在工具头快换夹持单元末端的放电加工工具头或焊接工具头提供加载放电电源、电极丝输送和工作介质的供给。
优选的,所述工作介质供给回收单元供给的工作介质包括水基工作液、油基工作液、空气、雾介质或焊接保护气体,所述工作介质的供给压力范围为0-10MPa,且在所述工作介质供给回收单元内部设置过滤单元实现工作介质循环过滤。
相比现有技术,本发明的有益效果在于:
1、本发明功能集成度高、工艺适应性强。依托机器人工作平台和通用接口,系统集成了利用电弧增材成形方法和微细电火花沉积成形方法实现的放电增材制造功能、利用电弧加工方法和电火花加工方法实现的放电减材加工功能、利用电弧堆焊方法实现的零件连接功能、利用光学扫描和超声探伤实现的在线检测功能。不仅可基于金属丝实现增材制造快速制备工件,而且可用于受损金属部件的快速修复;增减材一体化设计可实现金属构件的快速、高精度制备;通过光学和超声波检测模块,可实现加工工件的质量检测以及工艺优化。
2、本发明加工适用范围广,尤其涵盖了难加工材料和微小尺寸零部件的加工制造。增材制造功能中的微细电火花沉积成形方法兼顾了微小尺寸零部件的加工制造;而减材加工功能中的电弧加工和电火花加工方法都是利用放电形成的高温等离子体热蚀除工件表面材料,加工性能不受工件材料强度和硬度的影响,即使在面对难加工材料时,也能取得良好的加工效果;同时,包括沉入式、放电铣削在内的多种电弧和电火花加工方式确保了该系统可以实现具有复杂曲面特征零部件的生产制造。
3、本发明兼具高效和精密的加工特点。电弧加工可以实现工件材料的快速去除,电火花加工可以进行小余量精加工,两者完美互补。
4、本发明环境适应性强。系统可在水基工作液、油基工作液、空气、雾介质、焊接保护气体等多种工作介质中实施加工,摆脱了环境的限制,在太空、深海等极端工作环境中具有很强的应用前景。
附图说明
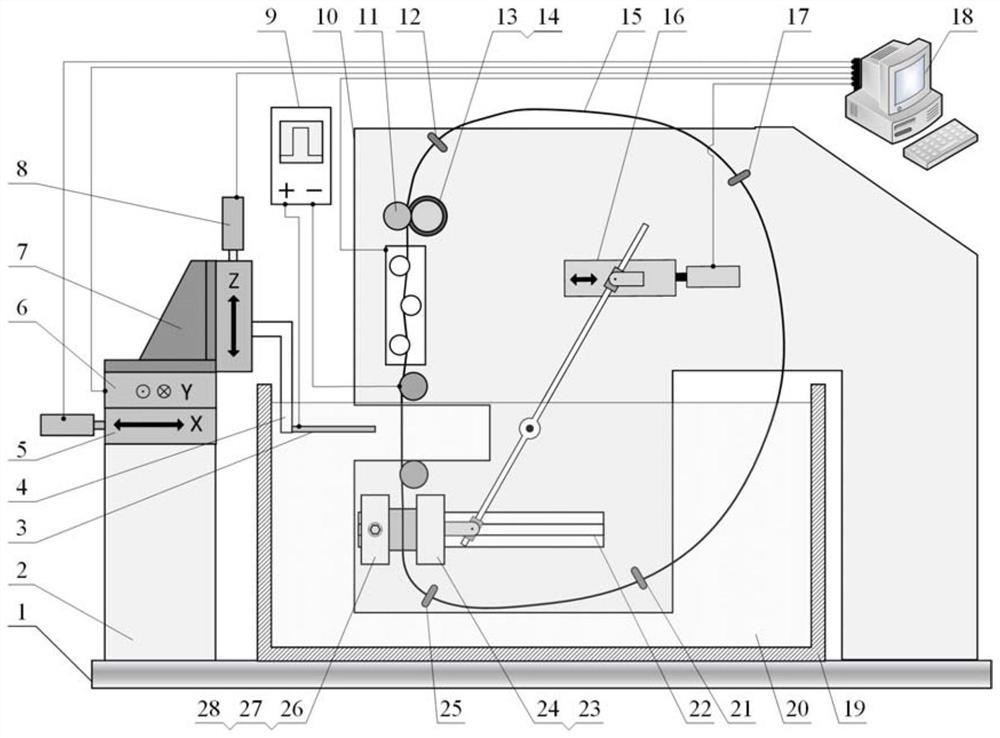
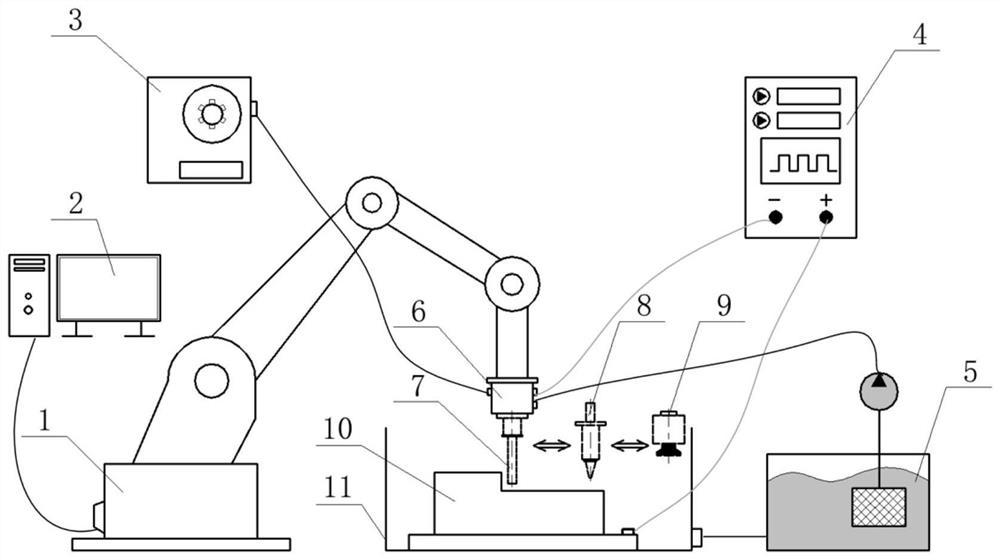
图1为本发明一种基于放电加工的多功能集成制造系统的结构示意图;
图2为本发明的多功能集成制造系统的集成功能示意图;
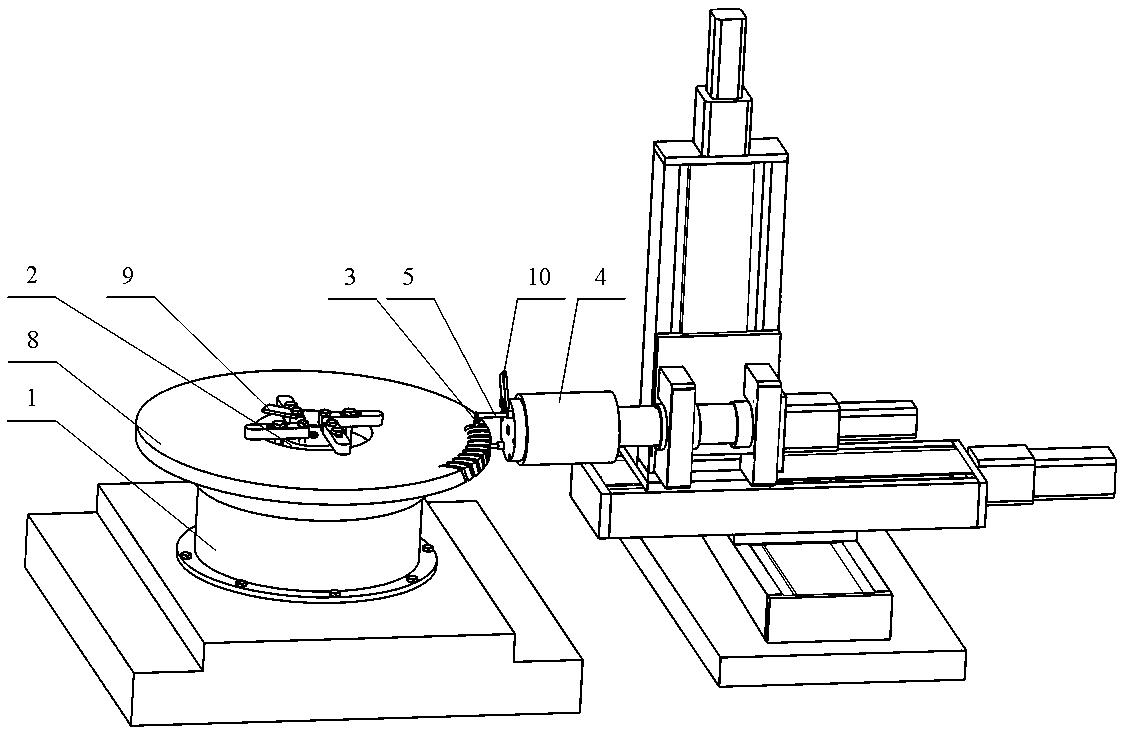
图3为实施例1框架类零件使用本发明集成制造示意图;
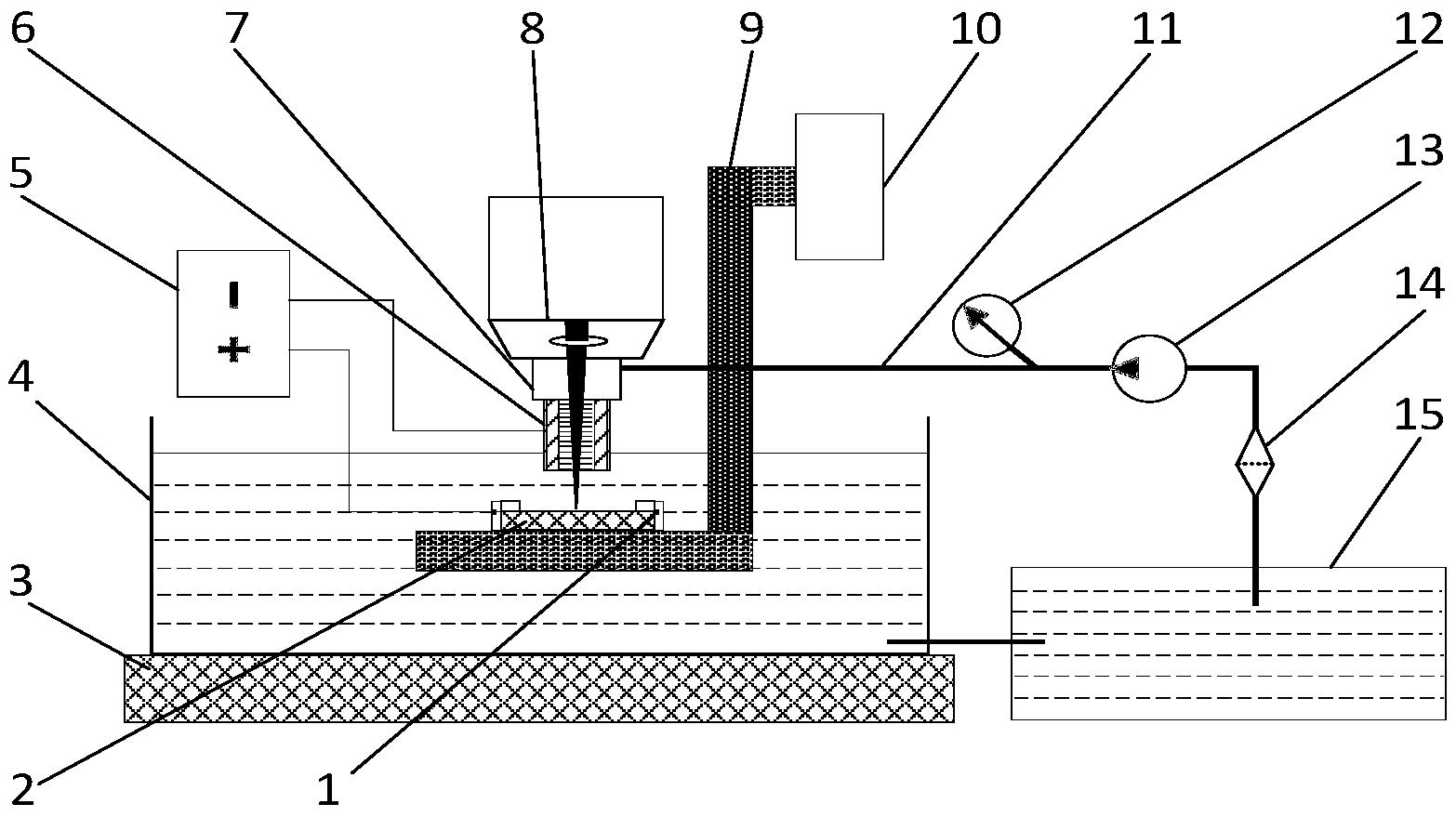
图4为实施例2叶片类零件使用本发明放电增材维修示意图;
图5为实施例3MEMS零件使用本发明集成制造示意图。
图中:1、机器人;2、运动控制单元;3、送丝装置;4、多功能复合放电电源;5、工作介质供给回收单元;6、工具头快换夹持单元;7、放电加工工具头;8、焊接工具头;9、检测工具头;10、工件;11、工作台。
具体实施方式
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
一、系统结构及连接关系
参见图1,本发明基于放电加工的多功能集成制造系统包括机器人1、运动控制单元2、送丝装置3、多功能复合放电电源4、工作介质供给回收单元5、工具头快换夹持单元6、放电加工工具头7、焊接工具头8、检测工具头9、工作台11。
其中,运动控制单元2与机器人1连接,运动控制单元2控制机器人1的加工进给路径,工具头快换夹持单元6安装于机器人1末端,工件10紧固在工作台11上,多功能复合放电电源4的正极(或负极)与工作台11相连,多功能复合放电电源4的负极(或正极)与快换夹持单元6相连,工作介质供给回收单元5的出口端与快换夹持单元6连接,工作介质供给回收单元5的入口端与工作台11连接,工作介质供给回收单元5为加工过程提供工作介质。
放电加工工具头7用于放电减材加工的;送丝装置3和焊接工具头8用于放电增材制造和零件连接;检测工具头9用于零件的在线检测。其中,放电加工工具头7、焊接工具头8或检测工具头9根据需要可相互替换的装夹在所述快换夹持单元6上。
其中,在放电加工工具头7和工件10之间形成放电加工所需的放电回路,通过配合使用机器人1、运动控制单元2、多功能复合放电电源4、工作介质供给回收单元5、工具头快换夹持单元6、放电加工工具头7和工作台11,在工件10上实现放电减材加工功能。利用电弧高效加工方法和电火花精密加工方法实现所述放电减材加工功能。
其中,送丝装置3将电极丝输送到快换夹持单元6,并最终进入焊接工具头8,在焊接工具头8和工件10之间形成放电加工所需的放电回路,通过配合使用机器人1、运动控制单元2、送丝装置3、多功能复合放电电源4、工作介质供给回收单元5、工具头快换夹持单元6、焊接工具头8和工作台11,实现放电增材制造和零件连接功能。利用电弧增材成形方法和微细电火花沉积成形方法实现所述放电增材制造功能,利用电弧堆焊方法实现所述零件连接功能。
通过配合使用机器人1、运动控制单元2、工具头快换夹持单元6、检测工具头9和工作台11,实现对工件10的在线检测功能。在线检测功能是指利用光学扫描实现零件三维形状和表面质量的检测或超声方法实现加工后零件的探伤检测。
其中,多功能复合放电电源4为放电电流在0.1-1000A范围内可调、脉宽和脉间在0.1μs-100ms可调的脉冲电源或者直流电源,所述多功能复合放电电源4具有5档电源参数输出模式,5档电源参数输出模式分别用于电弧高效加工、电火花精密加工、电弧增材成形、电弧堆焊、微细电火花沉积成形。
工具头快换夹持单元6的尾部配备快速接头,通过所述快速接头实现放电加工工具头7、焊接工具头8或检测工具头9的快速装夹和替换。
工具头快换夹持单元6具有与放电电源4、送丝装置3、工作介质供给回收单元5连接的接口,通过所述接口的连接,为安装在工具头快换夹持单元6末端的放电加工工具头7或焊接工具头8提供加载放电电源、电极丝输送和工作介质的供给。
工作介质供给回收单元5供给的工作介质包括水基工作液、油基工作液、空气、雾介质或焊接保护气体,所述工作介质的供给压力范围为0-10MPa,且在所述工作介质供给回收单元5内部设置过滤单元实现工作介质循环过滤。
二、系统工作原理及实现五档转换的加工过程(参见图1和图2)
1.实现电弧高效加工过程:
①、工具头快换夹持单元6安装于机器人1末端,放电加工工具头7装夹在快换夹持单元6上,待加工工件10紧固在工作台11上;
②、多功能复合放电电源4的正负两极分别与工具头快换夹持单元6、工作台11相连,并将放电电源4电源参数输出模式置为1档,然后详细设置峰值电流、开路电压、脉宽、脉间等参数,从而在放电加工工具头7、工件10之间形成电弧加工所需的放电回路;
③、工作介质供给回收单元5的出口端和入口端分别与工具头快换夹持单元6、工作台11连接,为电弧加工提供水基工作液、油基工作液、雾介质或空气等工作介质,同时需要将工作介质的流量及压力设置在合适的值;
④、运动控制单元2与机器人1连接,按照输入到运动控制单元2中的加工代码,控制放电加工工具头7加工进给路径,使放电加工工具头7和工件10之间形成放电击穿,进行稳定的电弧加工,进而完成特定形貌工件的加工。
2、实现电火花精密加工过程:
需将放电电源4电源参数输出模式置为2档,然后详细设置峰值电流、开路电压、脉宽、脉间等参数,从而在放电加工工具头7、工件10之间形成电火花加工所需的放电回路,其他步骤和实现电弧高效加工的过程基本一致。
3、实现电弧增材成形过程:
①、工具头快换夹持单元6安装于机器人1末端,焊接工具头8装夹在快换夹持单元6上;
②、送丝装置3与工具头快换夹持单元6连接,并通过快换夹持单元6将电极丝输送到焊接工具头8;
③、多功能复合放电电源4的正负两极分别与工具头快换夹持单元6、工作台11相连,并将放电电源4电源参数输出模式置为3档,然后详细设置放电参数,从而提供电弧增材所需的放电回路;
④、工作介质供给回收单元5的出口端和入口端分别与工具头快换夹持单元6、工作台11连接,为电弧增材提供工作介质;
⑤、运动控制单元2与机器人1连接,按照输入到运动控制单元2中的加工代码,控制焊接工具头8进给路径,进而完成特定形貌工件的电弧增材制造。
4、实现零件连接过程:
基于电弧堆焊的零件连接可以理解为是在零件需要连接的位置进行电弧增材,所以其实现过程和电弧增材的过程基本一致,只需将放电电源4电源参数输出模式置为4档,并将待连接的零件置于工作台上。
5、实现微细电火花沉积成形过程:
将多功能复合放电电源4电源参数输出模式置为5档,其余步骤和电弧增材过程类似。
①、工具头快换夹持单元6安装于机器人1末端,检测工具头9装夹在快换夹持单元6上;
②、切断多功能复合放电电源4;
③、运动控制单元2与机器人1连接,机器人1带动检测工具头9按照运动控制单元2中的代码对工作台11上的工件10进行光学扫描或者超声探伤,进而完成工件质量的在线检测。
三、具体实施例
实施例1
如附图3所示的框架类零件,其外轮廓三维尺寸为600mm×310mm×40mm,部件材料为镍基高温合金。使用本发明对该部件进行加工制造的过程为:
①、将多功能复合放电电源4电源参数输出模式置为3档(电弧增材成形模式),设置电流为100A,工作介质供给回收单元5提供焊接保护气体,使用电弧增材成形的方式加工出保留精加工余量的框架零件;
②、将多功能复合放电电源4电源参数输出模式置为1档(电弧高效加工模式),设置峰值电流500A,脉宽6ms,脉间4ms,开路电压90V,工作介质供给回收单元5提供水基工作液,使用电弧高效加工的方式在步骤①中的零件上进一步加工出侧面的两个通孔和方型型腔;
③、将多功能复合放电电源4电源参数输出模式置为2档(电火花精密加工模式),设置峰值电流15A,脉宽60μs,脉间100μs,开路电压120V,工作介质供给回收单元5提供油基工作液,对前两个步骤中形成的粗糙工件表面进行电火花精密加工;
④、对步骤③加工出的工件尺寸和质量进行在线检测,如尺寸未达到图纸要求,则根据需要重复前述步骤,并进行再次检测直至完全达标。
实施例2
如附图4所示的叶片零件存在一处缺损,使用本发明的集成制造系统进行增材制造维修:
①、将缺损的叶片工件放置在工作台11上,使用本发明系统的在线检测功能对缺损处进行光学扫描并根据原有工件三维模型反求出缺损处形貌;
②、将多功能复合放电电源4电源参数输出模式置为3档(电弧增材成形模式),设置电流为100A,工作介质供给回收单元5提供焊接保护气体,根据反求出的缺损形貌,使用电弧增材成形的方式对缺损处进行填充维修;
③、由于电弧增材成形的表面较为粗糙,需要对其进行精加工。将多功能复合放电电源4电源参数输出模式置为2档(电火花精密加工模式),设置峰值电流15A,脉宽60μs,脉间100μs,开路电压120V,工作介质供给回收单元5提供油基工作液,对步骤②中填充的缺损处进行局部电火花精密加工。
实施例3
如附图5所示的微机电传动系统(MEMS)桨类部件,其桨轴直径0.2mm、高度1.2mm、叶片外围直径1.6mm、厚度0.2mm,部件材料为不锈钢。使用本发明对该部件进行加工制造的过程为:
①、将多功能复合放电电源4电源参数输出模式置为2档(电火花精密加工模式),设置峰值电流5A,脉宽10μs,脉间20μs,开路电压120V,工作介质供给回收单元5提供油基工作液,对直径1.8mm、厚度0.2mm的圆盘毛坯进行电火花精密加工,得到附图3所示的叶盘;
②、将步骤①中加工好的叶盘置于工作台11上,并将多功能复合放电电源4电源参数输出模式置为5档(微细电火花沉积成形模式),设置峰值电流4A,脉宽8μs,脉间120μs,开路电压100V,工作介质供给回收单元5提供空气介质,在加工好的叶盘中心进行微细电火花沉积成形,加工得到桨轴,并最终形成桨类部件。
③、对步骤②加工出的工件尺寸和质量进行在线检测,如尺寸未达到图纸要求,则根据需要重复前述步骤,并进行再次检测直至完全达标。
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上诉教导,可以进行很多改变及变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变,即根据以上描述的技术方案以及构思,本领域的技术人员能够做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
一种基于放电加工的多功能集成制造系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0