











专利摘要
本发明公开了一种桥式起重机的超载限制器结构,包括硬件结构和控制模块,硬件结构包括拉力传感器、补偿钢索和吊钩绳索,拉力传感器的两端均设置有头撑,拉力传感器的顶部设置有限位架A和限位架B,拉力传感器的底部设置有限位架D和限位架C,限位架A和限位架B之间,限位架D和限位架C之间均设置有施力扣,且施力扣分别扣在传感器内部的第一传感段和第二传感段,补偿钢索的两端固定连接有紧固头,补偿钢索穿过拉力传感器底部的施力扣,吊钩绳索依次穿过紧固头和拉力传感器顶部的施力扣,控制模块包括交互电路、放大电路、ADC转换电路、单片机模块、报警电路和超载控制电路,更加智能的交互控制系统,使得操作更加简便。
说明书
技术领域
本发明涉及起重机技术领域,具体为一种桥式起重机的超载限制器结构。
背景技术
超载限制器通过重量传感器测量装载物重量,仪表实时显示实际载荷,当载荷达到其额定载荷的设定值时,发出号声光报警信,并可给出开关量输出。整个系统由传感器、连接电缆、微电脑主机等组成,现阶段起重机的超载限制机构有两种形式,一种是在卷筒轴的轴上设置超载限制装置,一种是在绳索上设置传感器,通过传感器对绳索拉力的检测,从而通过止动限制装置对驱动电机进行止动,同时报警,而现有的传感器式的超载限制器,由于单向拉伸的原因,容易造成传感器施力偏移,从而造成绳索两侧的拉力不均匀,同时拉力传感器的添加使得绳索出现晃动。
发明内容
为了克服现有技术方案的不足,本发明提供一种桥式起重机的超载限制器结构,通过对硬件检测结构的完善和控制系统的设计,使得在起重机的重量限制上数据检测和传输更加准确,同时更加智能的交互控制系统,使得操作更加简便。
本发明解决其技术问题所采用的技术方案是:一种桥式起重机的超载限制器结构,包括硬件结构和控制模块,所述硬件结构包括拉力传感器、补偿钢索和吊钩绳索,所述拉力传感器的两端均设置有头撑,所述拉力传感器的顶部左端和中间分别设置有限位架A和限位架B,所述拉力传感器的底部右端和中间分别设置有限位架D和限位架C,所述限位架A和限位架B之间,限位架D和限位架C之间,均设置有施力扣,且所述施力扣分别扣在传感器内部的第一传感段和第二传感段,所述补偿钢索的两端固定连接有紧固头,所述补偿钢索穿过拉力传感器底部的施力扣,且架在限位架D和限位架C上,所述吊钩绳索依次穿过紧固头和拉力传感器顶部的施力扣,且吊钩钢索架在限位架A和限位架B上;
所述控制模块包括交互电路、放大电路、ADC转换电路、单片机模块、报警电路和超载控制电路,所述拉力传感器将电信号传递至放大电路,通过ADC转换电路将放大电路的电信号进行转换,并将转换后的电信号传递单片机模块,通过单片机模块实现报警电路和超载控制电路工作,报警电路将信号显示在交互电路,并通过交互电路给予单片机模块相应的控制信号。
作为本发明一种有选的技术方案,所述紧固头内部设置有葫芦状的内腔,所述内嵌顶部安装有平销,所述平销的两侧设置有侧翼,所述平销纵向设置有六角螺钉。
作为本发明一种有选的技术方案,所述吊钩绳索安装在内腔的上部,所述补偿钢索设置在内腔的下部,且补偿钢索焊接在内腔内部。
作为本发明一种有选的技术方案,所述紧固头呈圆台状,且紧固头的右端只允许吊钩绳索穿过。
作为本发明一种有选的技术方案,所述限位架A、限位架B、限位架C和限位架D的中间均设置为光滑的圆弧面。
作为本发明一种有选的技术方案,所述拉力传感器采用电阻应变传感器,核心部件由4个弹性电阻应变片构成的等臂电桥电路。
作为本发明一种有选的技术方案,所述交互电路内部包括声光电路和拨码输入电路两部分。
与现有技术相比,本发明的有益效果是:
(1)本发明在硬件检测结构上,通过设置双施力扣,从而在绳索的绕置上受力更加均匀,使得吊钩的绳索在受力上只收到重力和电机拉力的作用,避免绳索受到起吊过程中其他力的影响,造成检测装置检测不准确的现象,并通过补偿钢索的形式,补偿吊钩的绳索一侧受力状况,产生力的偏移现象,通过补偿,则在传感器的信号处理上比原有的数据处理简单,也传感器内部的电阻应变信号传递更加精准,便于将第一传感段和第二传感段的信号进行耦合传递;
(2)本发明在控制模块上,通过设置较为精准化和智能化的传感器信号处理机制和单片机控制模块,从而很好的对拉力传感器的信号进行解析,并通过相应的报警和超载限制电路对电机进行控制,通过详细的报警模块实现更智能的情况报警,并通过结合硬件结构的精准检测,从而使起重机的超载控制和限制更加准确实用。
附图说明
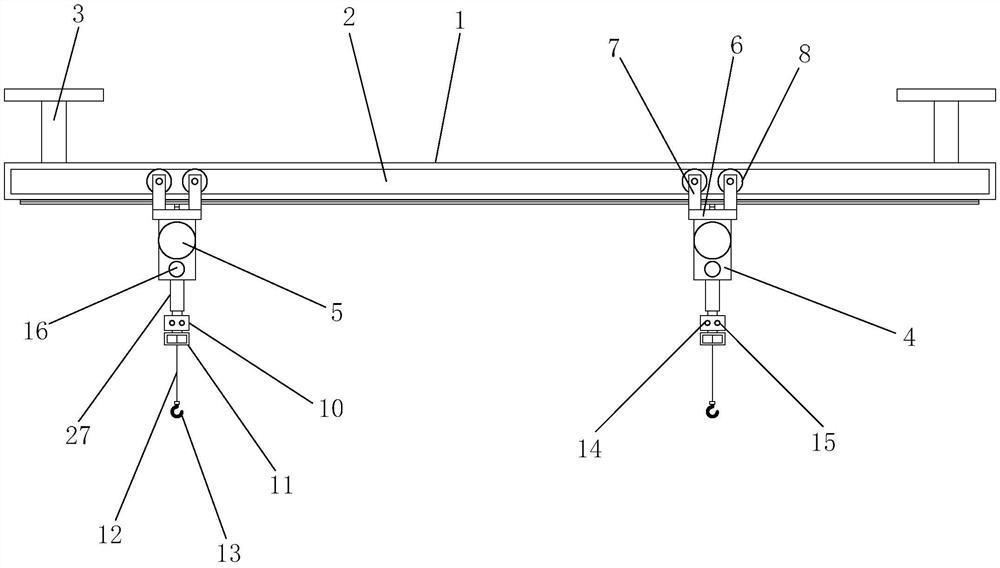
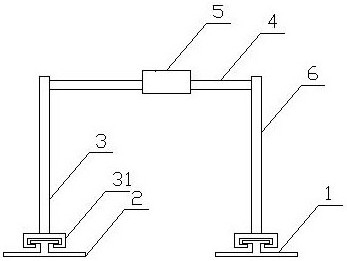
图1为本发明的硬件检测模块结构示意图;
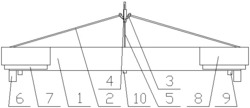
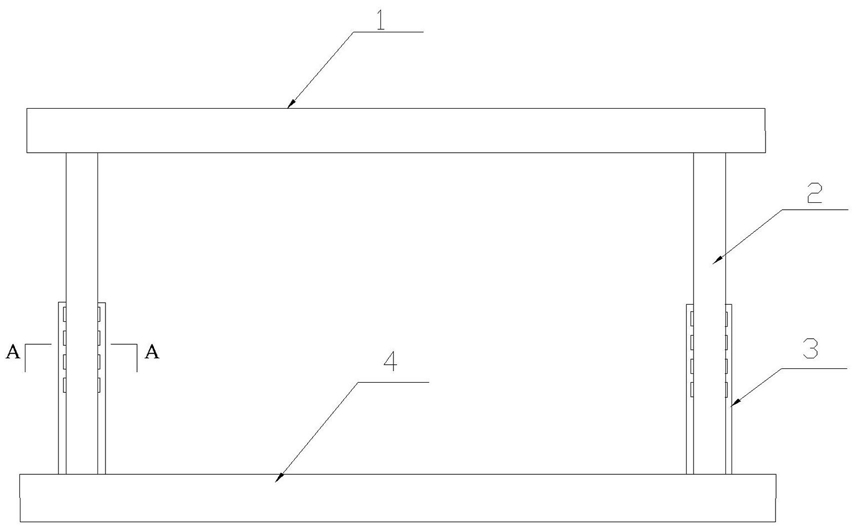
图2为本发明的紧固头结构示意图;
图3为本发明的控制模块示意图。
图中:1-拉力传感器;2-限位架A;3-限位架B;4-限位架C;5-限位架D;6-头撑;7-补偿钢索;8-吊钩绳索;9-紧固头;10-施力扣;11-第一传感段;12-第二传感段;21-交互电路;22-放大电路;23-ADC转换电路;24-单片机控制模块;25-报警电路;26-超载控制电路;91-平销;92-六角螺钉;93-侧翼;94-内腔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。本发明所提到的方向和位置用语,例如「上」、「中」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「侧面」等,仅是参考附加图式的方向和位置。因此,使用的方向和位置用语是用以说明及理解本发明,而非用以限制本发明。
实施例:
如图1所示,本发明提供了一种桥式起重机的超载限制器结构,包括硬件结构和控制模块,所述硬件结构包括拉力传感器1、补偿钢索7和吊钩绳索8,所述拉力传感器1的两端均设置有头撑6,所述拉力传感器1的顶部左端和中间分别设置有限位架A2和限位架B3,所述拉力传感器1的底部右端和中间分别设置有限位架D5和限位架C4,所述限位架A2和限位架B3之间,限位架D5和限位架C4之间,均设置有施力扣10,且所述施力扣10分别扣在传感器1内部的第一传感段11和第二传感段12,所述补偿钢索7的两端固定连接有紧固头9,所述补偿钢索7穿过拉力传感器1底部的施力扣10,且架在限位架D5和限位架C4上,所述吊钩绳索8依次穿过紧固头9和拉力传感器1顶部的施力扣10,且吊钩钢索8架在限位架A2和限位架B3上;
如图2所示,所述紧固头9内部设置有葫芦状的内腔94,所述内嵌94顶部安装有平销91,所述平销91的两侧设置有侧翼93,所述平销91纵向设置有六角螺钉92;所述吊钩绳索8安装在内腔94的上部,所述补偿钢索7设置在内腔94的下部,且补偿钢索7焊接在内腔94内部;所述紧固头9呈圆台状,且紧固头9的右端只允许吊钩绳索8穿过。
如图3所示,所述控制模块包括交互电路21、放大电路22、ADC转换电路23、单片机模块24、报警电路25和超载控制电路26,所述拉力传感器1将电信号传递至放大电路22,通过ADC转换电路23将放大电路22的电信号进行转换,并将转换后的电信号传递单片机模块24,通过单片机模块24实现报警电路25和超载控制电路25工作,报警电路25将信号显示在交互电路21,并通过交互电路21给予单片机模块24相应的控制信号,所述超载限制器采用电阻应变传感器作为拉力传感器,核心部件由4个弹性电阻应变片构成的等臂电桥电路;所述交互电路21内部包括声光电路和拨码输入电路两部分。
本发明的工作原理:将起重机的吊钩绳索套装在硬件检测模块上,通过紧固头使得吊钩绳索固定在拉力传感器的两端,同时将补偿钢索和吊钩绳索固定在一起,从而保证两者的受力均匀,并且吊钩绳索和补偿钢索通过相应的施力扣固定,使得施力扣紧紧的扣住第一传感段和第二传感段,在起重机工作时,由于限位架A和限位架B与施力扣锁紧的吊钩绳索之间存在高度差,吊钩绳索上收到的张力变成对第一传感段施加的压力,从而拉力传感器产生电信号变化,同时补偿钢索同样对第二传感段施加压力,后将两个电信号产生的耦合信号传递至控制模块的放大电路,并通过ADC转换电路将信号转换成单片机模块能够处理的信号,后通过和内置的阈值信号比较,通过驱动声光报警电路显示相应的工作状态。
单片机控制模块和ADC转换电路:单片机是整个超载限制器的核心。该方案采用Mega16L单片机作为控制芯片。ATmega16L有16K字节的系统内可编程Flash,512字节EEPROM,限制器的重量系数、空笼重量值等参数存放在EEPROM中,保证掉电开机后限制器仍可正常工作,32个通用I/O口,通过控制程序可以对每个端口单独的设置参数,该方案中用作报警电路、输入电路和单片机通信的接口,选择Mega16L作控制单片机的一个重要原因就是它内部集成了8路10位具有可选差分输入级以及可编程增益的ADC,集成ADC可以简化整个超载限制器的电路设计并降低整机的制造成本,Mega16L片内的ADC通过逐次逼近的方式将输入的模拟电压转换成一个10位的数字量,它内部还包括一个采样保持电路,以确保在转换过程中输入到ADC的电压保持恒定,使转化准确。
交互电路:交互电路由声光报警电路和拨码输入电路2部分构成;其中声光报警电路最主要有两方面的作用;一是根据重量比较的结果发出预警和报警声光信号;二是在用户进行系统自检、空笼校准、重量输入以及重量计算等操作时,点亮相应的LED给用户提示。
传感器:超载限制器采用电阻应变传感器作为拉力传感器,核心部件由4个弹性电阻应变片构成的等臂电桥电路。利用等臂电桥电路可以把重量的变化转化为电压的变化。电阻应变片当不受外力时,4个电阻片阻值相等,电桥处于平衡状态,电桥两端输出为零。当受力时应变片产生形变导致电阻值发生变化,从而使电桥电路失去平衡,在电桥有外电源供电的情况下,电桥会产生微小的电压差,利用该电压差的大小可以来检测被测重量的大小,检测的精度可达0.2%。
综上所述,本发明的主要特点在于:(1)本发明在硬件检测结构上,通过设置双施力扣,从而在绳索的绕置上受力更加均匀,使得吊钩的绳索在受力上只收到重力和电机拉力的作用,避免绳索受到起吊过程中其他力的影响,造成检测装置检测不准确的现象,并通过补偿钢索的形式,补偿吊钩的绳索一侧受力状况,产生力的偏移现象,通过补偿,则在传感器的信号处理上比原有的数据处理简单,也传感器内部的电阻应变信号传递更加精准,便于将第一传感段和第二传感段的信号进行耦合传递;本发明在控制模块上,通过设置较为精准化和智能化的传感器信号处理机制和单片机控制模块,从而很好的对拉力传感器的信号进行解析,并通过相应的报警和超载限制电路对电机进行控制,通过详细的报警模块实现更智能的情况报警,并通过结合硬件结构的精准检测,从而使起重机的超载控制和限制更加准确实用。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
桥式起重机的超载限制器结构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0