










专利摘要
本发明提供了一种适用于视力障碍者的室内定位导航方法及系统,用户终端执行如下步骤:环境数据接收步骤,用于接收环境探测单元采集到的环境数据;二维布局图请求发送步骤,向服务器发送请求,请求给出此建筑物的二维布局图;定位步骤,通过二维布局图结合用户移动数据计算出用户的当前位置;导航步骤,联合用户当前位置和目的地,使用路线规划算法计算出一条最优的路线,并为用户进行语音导航,在语音导航过程中,当环境探测单元检测到障碍物时,接收环境探测单元发送的有障碍物数据信息,并且语音提示用户绕开障碍物。本发明的有益效果是:本发明适用于各类用户人群,尤其对视力障碍人群具有很好的辅助作用,值的推广应用。
权利要求
1.一种适用于视力障碍者的室内定位导航方法,其特征在于,用户终端执行如下步骤:
环境数据接收步骤,用于接收环境探测单元采集到的环境数据;
二维布局图请求发送步骤,检测建筑物对应的一个或多个WIFI,并使用WIFI对应的路由器的MAC地址向服务器发送请求,请求给出此建筑物的二维布局图;
定位步骤,接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
导航步骤,接收用户说出的目的地语音指令,联合用户当前位置和目的地,使用路线规划算法计算出一条最优的路线,并为用户进行语音导航,在语音导航过程中,当环境探测单元检测到障碍物时,接收环境探测单元发送的有障碍物数据信息,并且语音提示用户绕开障碍物;
手持式设备采用移动式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术获取该建筑物的室内二维布局图,并使之关联到一个或多个WIFI路由器的MAC地址,然后将该二维布局图数据以及关联的MAC地址上传保存至服务器;
在所述定位步骤中,根据二维布局图和用户当前环境信息使用SLAM定位算法进行初步的室内定位信息,然后采用WIFI和惯性单元对初步的室内定位信息进一步进行校准,从而得到用户在二维布局图上的位置;
在所述导航步骤中,使用Dijkstra路线规划算法计算出一条最优的路线;在所述导航步骤中,用户依照给定线路行走过程中,根据惯性单元以及用户在地图上的位移,计算出用户平均一个步伐距离,从而通过步数引导用户前行。
2.根据权利要求1所述的室内定位导航方法,其特征在于,所述环境探测单元包括:
激光雷达单元,用于探测用户周围的环境;
障碍检测单元,用于检测激光雷达单元检测盲区内,位于用户前方的障碍物。
3.一种适用于视力障碍者的室内定位导航系统,其特征在于,用户终端执行如下模块:
环境数据接收模块,用于接收环境探测单元采集到的环境数据;
二维布局图请求发送模块,用于检测建筑物对应的一个或多个WIFI,并使用WIFI对应的路由器的MAC地址向服务器发送请求,请求给出此建筑物的二维布局图;
定位模块,用于接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
导航模块,用于接收用户说出的目的地语音指令,联合用户当前位置和目的地,使用路线规划算法计算出一条最优的路线,并为用户进行语音导航,在语音导航过程中,当环境探测单元检测到障碍物时,接收环境探测单元发送的有障碍物数据信息,并且语音提示用户绕开障碍物;
手持式设备采用移动式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术获取该建筑物的室内二维布局图,并使之关联到一个或多个WIFI路由器的MAC地址,然后将该二维布局图数据以及关联的MAC地址上传保存至服务器;
在所述定位模块中,根据二维布局图和用户当前环境信息使用SLAM定位算法进行初步的室内定位信息,然后采用WIFI和惯性单元对初步的室内定位信息进一步进行校准,从而得到用户在二维布局图上的位置;
在所述导航模块中,使用Dijkstra路线规划算法计算出一条最优的路线;在所述导航模块中,用户依照给定线路行走过程中,根据惯性单元以及用户在地图上的位移,计算出用户平均一个步伐距离,从而通过步数引导用户前行。
4.根据权利要求3所述的室内定位导航系统,其特征在于,所述环境探测单元包括:
激光雷达单元,用于探测用户周围的环境;
障碍检测单元,用于检测激光雷达单元检测盲区内,位于用户前方的障碍物。
说明书
技术领域
本发明涉及室内定位与导航技术领域,尤其涉及一种适用于视力障碍者的室内定位导航方法及系统。
背景技术
目前我国视力障碍人者数量已经超过1000万,而且这个数字还这增长。视力障碍者数量那么多,为什么我们日常生活中见到的却很少?因为他们真的不敢出门。几乎所有的公共设施,对视力障碍者都谈不上友善。由于设施和交通的不友善,如果没有人陪同,视力障碍者可以说是寸步难行。所以,他们出门,是需要人带的。这给出门增加了不少成本,不只是金钱成本。我们不仅仅应该要求政府继续出台更加完备的政策和法规,或者制造出更多有利于视力障碍者日常生活的产品。视力障碍人群如此之庞大,应该得到社会各界人士的关爱和照顾。作为普通人,我们自身也应该为残疾人做些力所能及的事情。
怎样顺利的行走至目的地,对于普通人来说是一件轻而易举的事情,但对于视力障碍者,却是他们面临的一个重大问题。我国的大部分建筑都没有考虑到视力障碍者这个特殊的群体而进行设计。这导致他们无法独立地生活,甚至是安全地行走。虽然目前市面有不少针对视力障碍人群导航的产品,但它们存在很大的缺点,尚未能满足视力障碍者日常生活需求。
发明内容
本发明提供了一种适用于视力障碍者的室内定位导航方法,用户终端执行如下步骤:
环境数据接收步骤,用于接收环境探测单元采集到的环境数据;
二维布局图请求发送步骤,检测建筑物对应的一个或多个WIFI,并使用WIFI对应的路由器的MAC地址向服务器发送请求,请求给出此建筑物的二维布局图;
定位步骤,接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
导航步骤,接收用户说出的目的地语音指令,联合用户当前位置和目的地,使用路线规划算法计算出一条最优的路线,并为用户进行语音导航,在语音导航过程中,当环境探测单元检测到障碍物时,接收环境探测单元发送的有障碍物数据信息,并且语音提示用户绕开障碍物。
作为本发明的进一步改进,在所述定位步骤中,根据二维布局图和用户当前环境信息使用SLAM定位算法进行初步的室内定位信息,然后采用WIFI和惯性单元对初步的室内定位信息进一步进行校准,从而得到用户在二维布局图上的位置。
作为本发明的进一步改进,在所述导航步骤中,使用Dijkstra路线规划算法计算出一条最优的路线;在所述导航步骤中,用户依照给定线路行走过程中,根据惯性单元以及用户在地图上的位移,计算出用户平均一个步伐距离,从而通过步数引导用户前行。
作为本发明的进一步改进,所述环境探测单元包括:
激光雷达单元,用于探测用户周围的环境;
障碍检测单元,用于检测激光雷达单元检测盲区内,位于用户前方的障碍物。
作为本发明的进一步改进,手持式设备采用移动式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术获取该建筑物的室内二维布局图,并使之关联到一个或多个WIFI路由器的MAC地址,然后将该二维布局图数据以及关联的MAC地址上传保存至服务器。
本发明还提供了一种适用于视力障碍者的室内定位导航系统,用户终端执行如下模块:
环境数据接收模块,用于接收环境探测单元采集到的环境数据;
二维布局图请求发送模块,用于检测建筑物对应的一个或多个WIFI,并使用WIFI对应的路由器的MAC地址向服务器发送请求,请求给出此建筑物的二维布局图;
定位模块,用于接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
导航模块,用于接收用户说出的目的地语音指令,联合用户当前位置和目的地,使用路线规划算法计算出一条最优的路线,并为用户进行语音导航,在语音导航过程中,当环境探测单元检测到障碍物时,接收环境探测单元发送的有障碍物数据信息,并且语音提示用户绕开障碍物。
作为本发明的进一步改进,在所述定位模块中,根据二维布局图和用户当前环境信息使用SLAM定位算法进行初步的室内定位信息,然后采用WIFI和惯性单元对初步的室内定位信息进一步进行校准,从而得到用户在二维布局图上的位置。
作为本发明的进一步改进,在所述导航模块中,使用Dijkstra路线规划算法计算出一条最优的路线;在所述导航模块中,用户依照给定线路行走过程中,根据惯性单元以及用户在地图上的位移,计算出用户平均一个步伐距离,从而通过步数引导用户前行。
作为本发明的进一步改进,所述环境探测单元包括:
激光雷达单元,用于探测用户周围的环境;
障碍检测单元,用于检测激光雷达单元检测盲区内,位于用户前方的障碍物。
作为本发明的进一步改进,手持式设备采用移动式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术获取该建筑物的室内二维布局图,并使之关联到一个或多个WIFI路由器的MAC地址,然后将该二维布局图数据以及关联的MAC地址上传保存至服务器。
本发明的有益效果是:本发明适用于各类用户人群,尤其对视力障碍人群具有很好的辅助作用,值的推广应用。
附图说明
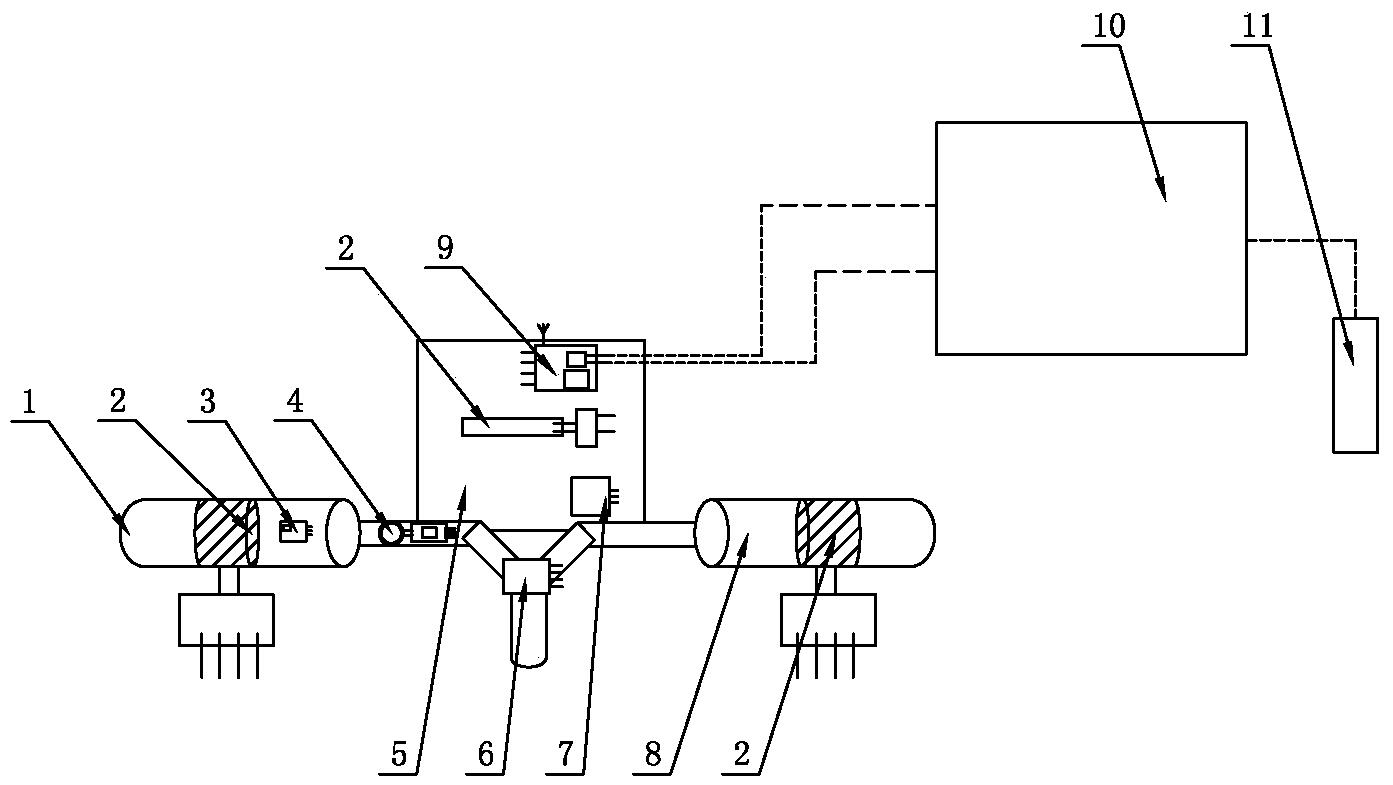
图1是本发明的手持式设备结构示意图。
图2是本发明的提供商的使用流程图。
图3是本发明的一般用户的使用流程图。
具体实施方式
在本发明中,针对用户有两类:提供商和一般用户,一般用户中包括视力障碍用户。
提供商采用手持式设备扫描建筑物内部,得到该建筑物对应的二维布局图并且使之与该建筑物的一个或多个WIFI路由器的MAC地址关联起来,然后操作该手持式设备,将二维布局图以及关联的MAC地址通过公有网络发送到云服务器中保存起来。
如图1所示,手持式设备包括移动式激光雷达系统、WIFI模块和4G移动通信模块,手持式设备采用移动式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术获取该建筑物的室内二维布局图,并使之关联到一个或多个WIFI路由器MAC地址,然后将该布局图数据以及关联的MAC地址上传保存至云服务器端。为了便于室内定位与导航服务的提供商使用,所以制作成手持式的设备,当然也将手持式设备制作成可以挂载到一些智能设备上部件,例如挂载到遥控车、无人机等。如此一来,实施者只需手持着该设备采集建筑物内部结构数据,或者让挂载了该部件的智能设备去采集建筑物内部结构数据而不需实施者亲自去。由于移动式激光雷达系统能采集到建筑物内部结构数据,而且重量适中,故本实施例采用它。另外,为了所采集到的二维布局图,与该建筑物的WIFI路由器的MAC地址关联起来,本实施例为这个手持式设备附带WIFI模块。之所以将它们关联起来,是因为当用户进入一个建筑物的时候,通过检测这个建筑内WIFI路由器的MAC地址,然后依据这个地址找到该建筑物对应的二维布局图。本实施例中才采用亚马逊云服务器,而不采用本地服务器。当然,也可以使用其他云服务器提供商提供的云服务。为了将数据发送到云服务器中,本实施例为这个手持式设备附带一个4G移动通信模块,使其可以利用4G移动通信技术与云服务器通信。当然,此设备也可直接利用能连接到公网的WIFI来与云服务器通信。
一般用户使用的是用户终端,用户终端可以是安装有应用程序的智能手机、平板电脑等电子设备。环境探测单元包括激光雷达单元和障碍检测单元,激光雷达单元戴在用户的肩部,形成肩戴式设备;障碍检测单元戴在用户的小腿位置,形成小腿戴式设备。用户拿到用户终端、及携带肩戴式设备和小腿戴式设备步入建筑物内,用户终端会用语音提示用户现在所处的位置,接着用户可使用语音给出想去的目的地,接着用户终端会用语音提示用户如何步行到目的地。当用户使用了本技术一定时间后,本技术会计算出用户一个步伐的大小,因此在语音提示用户的时候,可以使用步伐作为距离的单位。如此一来,语音提示对于视力障碍用户来说,会更加友好。
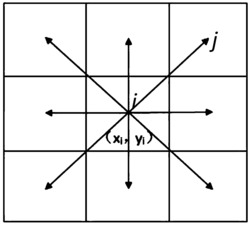
肩戴式设备和小腿戴式设备都是利用蓝牙技术与用户的智能手机连接,以便进行数据通信。这个肩戴式设备利用激光雷达系统扫描用户四周的环境,并将获取的环境探测数据传送至用户终端。这里所采用的激光雷达的扫描范围是一个水平的,以它自身为中心的360度平面。由于用户的脖子会遮挡一部分的扫描,所以其扫描水平角度大约在180度和270度范围内,而不会达到360度。但是本实施例中采取的SLAM算法并不要求扫描的角度达到360度。小腿戴式设备采用基于飞行时间原理的深度摄像头检测用户的前方的且位于肩戴式设备扫描盲区内的障碍物。当检测前方的障碍物阻碍用户行走时,它会向用户终端发送警报信息,然后用户终端向用户发出语音警报。
本发明公开了一种适用于视力障碍者的室内定位导航方法,用户终端执行如下步骤:
环境数据接收步骤,用于接收环境探测单元采集到的环境数据;
二维布局图请求发送步骤,检测建筑物对应的一个或多个WIFI,并使用WIFI对应的路由器的MAC地址向服务器发送请求,请求给出此建筑物的二维布局图;
定位步骤,接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
用户移动数据是指用户终端中的惯用单元所采集的数据。
导航步骤,接收用户说出的目的地语音指令,联合用户当前位置和目的地,使用路线规划算法计算出一条最优的路线,并为用户进行语音导航,在语音导航过程中,当环境探测单元检测到障碍物时,接收环境探测单元发送的有障碍物数据信息,并且语音提示用户绕开障碍物。
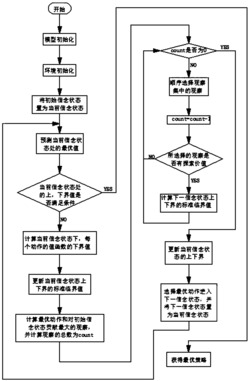
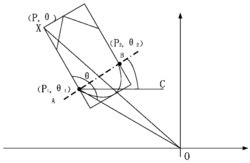
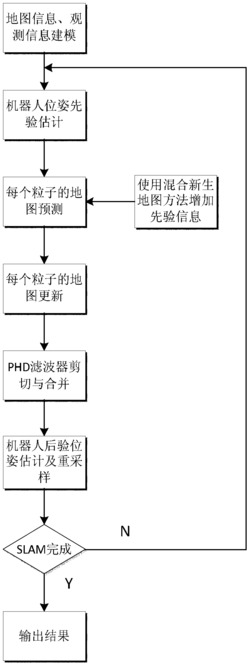
在所述定位步骤中,根据二维布局图和用户当前环境信息使用SLAM(Simultaneous Localization And Mapping)定位算法进行初步的室内定位信息,然后采用WIFI和惯性单元对初步的室内定位信息进一步进行校准,从而得到用户在二维布局图上的位置。具体为,肩戴式设备所采集的环境探测数据使用SLAW算法为用户进行初步的室内定位,然后采用WIFI与惯性单元室内定位技术对这个定位进行进一步的校准,以提高定位精度。
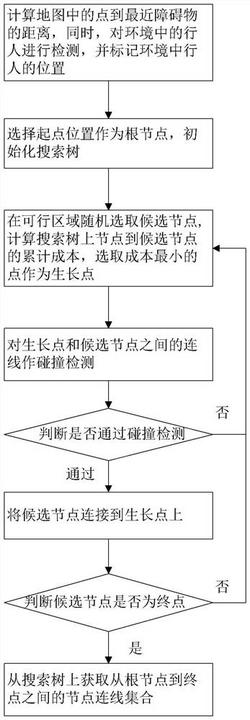
在所述导航步骤中,使用Dijkstra路线规划算法计算出一条最优的路线;在所述导航步骤中,用户依照给定线路行走过程中,根据惯性单元以及用户在地图上的位移,计算出用户平均一个步伐距离,从而通过步数引导用户前行。
通过用户终端的惯用单元在用户步行时的变化,区分出用户在步行一定时间内的步伐数,与此同时,应用程序会记录用户在此段时间内的步行路程,然后结合两者计算出用户平均一个步伐的距离大小。
一般用户的使用流程如下:1.当用户戴上并启动肩戴式和小腿戴式设备,启动本应用程序后,此应用程序扫描附近设备并自动进行蓝牙连接,然后肩戴式和小腿戴式设备不断向智能手机发送各自采集到的数据;2.应用程序接收这些数据,并检测用户所在的建筑物对应的一个或多个WIFI,并使用这些WIFI对应的路由器的MAC地址向云服务器单元发送请求,请求给出此建筑物的二维布局;3.云服务器收到这个请求后,返回这MAC地址对应的二维布局图,这个二维布局图即为这个建筑物的二维布局图;4.此应用程序收到这个二维布局图后,联合肩戴式设备采集到的数据和用户移动数据,计算出用户的当前位置,接着语音提示用户现在的位置,并且询问用户想要去到的目的地;5.用户说出想要去到的目的地;6.此应用程序接收到这个命令,联合用户当前位置和目的地,使用路线规划算法,计算出一条最优的路线,并为用户进行语音导航。在语音导航的过程中,由于小腿戴式设备会不断检测用户前方的且位于肩戴式设备扫描盲区内的障碍物,当发现障碍物,这个应用程序会给出相应的提示;此外应用程序还会计算出用户平均一个步伐的大小。
本发明还公开了一种适用于视力障碍者的室内定位导航系统,包括用户终端执行如下模块:
环境数据接收模块,用于接收环境探测单元采集到的环境数据;
二维布局图请求发送模块,用于检测建筑物对应的一个或多个WIFI,并使用WIFI对应的路由器的MAC地址向服务器发送请求,请求给出此建筑物的二维布局图;
定位模块,用于接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
定位模块,用于接收服务器发送的二维布局图,通过二维布局图结合用户移动数据计算出用户的当前位置,语音提示用户现在的位置,并且询问用户想要去的目的地;
在所述定位模块中,根据二维布局图和用户当前环境信息使用SLAM定位算法进行初步的室内定位信息,然后采用WIFI和惯性单元对初步的室内定位信息进一步进行校准,从而得到用户在二维布局图上的位置。
在所述导航模块中,使用Dijkstra路线规划算法计算出一条最优的路线;在所述导航模块中,用户依照给定线路行走过程中,根据惯性单元以及用户在地图上的位移,计算出用户平均一个步伐距离,从而通过步数引导用户前行。
室内定位导航系统包括:手持式设备采用移动式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术获取该建筑物的室内二维布局图,并使之关联到一个或多个WIFI路由器的MAC地址,然后将该二维布局图数据以及关联的MAC地址上传保存至云服务器。
本发明适用于各类用户人群,尤其对视力障碍人群具有很好的辅助作用,值的推广应用。
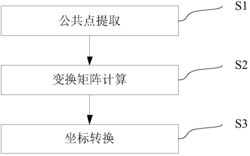
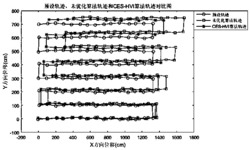
综上,在本发明中,提供商(如商城等)预先采用便携式激光雷达采集建筑物内部结构数据,利用即时定位与布局重构技术计算该建筑物的室内二维布局图,并将该布局图上传至服务器端(包括本地服务器或者云服务器);2.用户使用环境探测单元和用户终端(包括智能设备),对其当前所处的室内环境进行探测和感知,并利用智能设备获取用户的移动信息,然后将相应数据上传到服务器端或者从服务器端获取到所处建筑的室内布局地图;3.服务器或者本地智能设备利用用户上传/获取到的环境探测数据和用户移动数据,采用即使即时定位和地图重构算法计算当前的环境布局,并结合已有室内二维布局图获取用户当前的室内位置。同时,结合用户移动数据,采用闭环反馈的方式对位置进行进一步地校准,以提高定位精度;4.根据用户提供的目的位置,采用路径规划算法计算最优路线,并利用交互单元引导用户走向目的地,从而完成导航任务。对比已有室内定位和导航技术,本发明将惯性导航技术和即时定位与地图重构技术相结合,改善了已有室内导航技术的不足,提高了导航的精度和可靠性。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
一种适用于视力障碍者的室内定位导航方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0