








专利摘要
本发明公开了一种宽工作域无刷电机高效控制系统及控制方法,用于航空航天器能源系统。本发明的系统包括供电模块、第一DC‑DC电路、电池组、第二DC‑DC电路、防反电路、ESC、BLDC、机载控制器、通讯链路。来自供电模块的电能通过第一DC‑DC电路给电池组充电,电池组的电能依次经由第二DC‑DC电路,防反电路给ESC供电,其中,第二DC‑DC电路的输出电压、ESC的油门信号输入均由机载控制器根据飞行器的动力需求来实时控制;本发明的宽工作域无刷电机高效控制系统适用于长航时无人机等功率需求范围较大的无刷电机控制系统,可以实现在宽的工作域内,整个动力系统都能保持高效的动力输出。
权利要求
1.一种宽工作域无刷电机高效控制系统,其特征在于,包括:供电模块、第一DC-DC电路、电池组、第二DC-DC电路、防反电路、ESC、BLDC、机载控制器、通讯链路;其中:
所述供电模块,经由第一DC-DC电路进行稳压直流输出给电池组供电;
所述电池组,依次通过第二DC-DC电路、防反电路给ESC供电,ESC驱动BLDC转动;
所述第二DC-DC电路,采用可调DC-DC电路,可根据输入的信号改变输出的电压值;
所述通讯链路,用于传递飞控系统输出的原始油门值给机载控制器;
所述机载控制器,可获取来自第一DC-DC电路的输入输出电压电流信息及电池组输出电压电流信息,进行监测;并可将通讯链路传递来的原始油门值与动力系统的功率需求进行对应,根据当前飞行器的功率需求与设定的功率阈值的关系,输出两路控制信号,第一路控制信号给ESC,用于控制ESC的油门量,第二路控制信号输出给第二DC-DC电路,用于控制第二DC-DC电路输出匹配的电压值。
2.根据权利要求1所述的宽工作域无刷电机高效控制系统,其特征在于,所述的系统还包括稳压模块,用于给机载设备提供稳定的电源。
3.根据权利要求1所述的宽工作域无刷电机高效控制系统,其特征在于,所述的供电模块包括光伏供电、燃料电池供电、燃油发电机供电,采用单路或多路并联供电。
4.根据权利要求1所述的宽工作域无刷电机高效控制系统,其特征在于:所述的第一DC-DC电路和第二DC-DC电路为BUCK型电路、 同步 BUCK型电路或者是BUCK-BOOST型电路。
5.一种宽工作域无刷电机高效控制方法,其特征在于,采用如权利要求1-4任一项所述的系统实现,所述的控制方法包含以下步骤:
1)所述机载控制器通过通讯链路接收由飞控系统输出的原始油门信号,将原始油门信号与动力系统的功率需求进行映射,从而获得此时动力系统的功率需求;
2)对动力系统的功率需求进行判定:
当动力系统的功率需求小于或等于预先设定的功率阈值时,机载控制系统输出ESC的控制信号以改变实际的油门值,同时控制第二DC-DC电路以基准电压供电;
当动力系统的功率需求高于预先设定的功率阈值时,机载控制系统按照联调策略,同时改变ESC的油门量及第二DC-DC电路的输出电压值,以实现大功率动力输出。
6.根据权利要求5所述的宽工作域无刷电机高效控制方法,其特征在于,所述的基准电压为第二DC-DC电路实际输出的最低电压,即为ESC所支持的最低电压。
7.根据权利要求5所述的宽工作域无刷电机高效控制方法,其特征在于,所述的联调策略为查询预先获得的动力匹配表,从而输出与所需功率对应的ESC的油门量及第二DC-DC的输出电压值,所述的动力匹配表记录有不同功率需求下,可使系统达到最佳效率所对应的工作电压及ESC油门量。
8.根据权利要求7所述的宽工作域无刷电机高效控制方法,其特征在于,所述的动力匹配表通过风洞试验获得,首先获取动力装置在目标工况下等功率输出时的效率曲线,再将曲线上效率最高点所对应的工作电压及对应的油门量大小一一记录;不同的等功率输出分别对应有相应效率曲线,将每条效率曲线中最高点对应的工作电压、油门量、以及功率记录,则获得动力匹配表。
9.根据权利要求5所述的宽工作域无刷电机高效控制方法,其特征在于,所述的联调策略是通过在动力组上加装相应的力传感器,结合以追踪动力系统实时最高效率为目标的动态追踪算法实现。
10.根据权利要求5所述的宽工作域无刷电机高效控制方法,其特征在于,所述的将原始油门信号与动力系统的功率需求进行映射,采用线性映射。
说明书
技术领域
本发明属于航空航天器能源系统技术领域,尤其涉及一种宽工作域无刷电机高效控制系统及控制方法。
背景技术
对于某些特定的无刷动力系统(如长航时的电动无人机、可垂直起降的倾转电动无人机)来说,对其要求工作域范围大,然而传统恒压驱动的控制方式难以在宽工作域下实现高效的动力输出。例如:对于长航时的电动无人机,其巡航阶段所需的功率较低,小于无刷直流电机(BLDC)额定功率的1/4,偏离动力系统的高效区间;对于可垂直起降的倾转电动无人机,垂直起飞和水平巡航采用同一套动力装置,两个工作状态间所需的功率值差距巨大,若采用传统恒压驱动的方式,通常以满足垂直起飞的要求来确定系统工作电压,这也导致了该型无人机在水平飞行时,动力系统的效率低下。
发明内容
本发明的目的在于针对现有技术的不足,提供一种宽工作域无刷电机高效控制系统及控制方法,通过电池组串联DC-DC电路的方式,可以实现一定电压范围的电源输出,并通过相应的控制策略,对ESC的输入电压和ESC的油门输入量进行联调控制,可以提高动力系统的整体效率,从而实现在宽工作域下系统都能高效地输出。
本发明通过以下技术方案予以实现:
一种宽工作域无刷电机高效控制系统,包括:供电模块、第一DC-DC电路、电池组、第二DC-DC电路、防反电路、ESC、BLDC、机载控制器、通讯链路;其中:
所述供电模块,经由第一DC-DC电路进行稳压直流输出给电池组供电;
所述电池组,依次通过第二DC-DC电路、防反电路给ESC供电,ESC驱动BLDC转动;
所述第二DC-DC电路,采用可调DC-DC电路,可根据输入的信号改变输出的电压值;
所述通讯链路,用于传递飞控系统输出的原始油门值给机载控制器;
所述机载控制器,可获取来自第一DC-DC电路的输入输出电压电流信息及电池组输出电压电流信息,进行监测;并可将通讯链路传递来的原始油门值与动力系统的功率需求进行对应,根据当前飞行器的功率需求与设定的功率阈值的关系,输出两路控制信号,第一路控制信号给ESC,用于控制ESC的油门量,第二路控制信号输出给第二DC-DC电路,用于控制第二DC-DC电路输出匹配的电压值。
上述技术方案中,进一步的,所述的系统还包括稳压模块,用于给机载设备提供稳定的电源。
进一步的,所述的供电模块包括光伏供电、燃料电池供电、燃油发电机供电,可以采用单路或多路并联供电。
进一步的,所述的第一DC-DC电路和第二DC-DC电路可以为BUCK型电路、 同步BUCK型电路或者是BUCK-BOOST型电路。
一种宽工作域无刷电机高效控制方法,基于上述的系统实现,所述的控制方法包含以下步骤:
1)所述机载控制器通过通讯链路接收由飞控系统输出的原始油门信号,将原始油门信号与动力系统的功率需求进行映射,从而获得此时动力系统的功率需求;
2)对动力系统的功率需求进行判定:
当动力系统的功率需求小于或等于预先设定的功率阈值时,机载控制系统输出ESC的控制信号以改变实际的油门值,同时控制第二DC-DC电路以基准电压供电;
当动力系统的功率需求高于预先设定的功率阈值时,机载控制系统按照联调策略,同时改变ESC的油门量及第二DC-DC电路的输出电压值,以实现大功率动力输出。
上述控制方法中,所述的基准电压为第二DC-DC电路实际输出的最低电压,即为ESC所支持的最低电压。
进一步的,所述的联调策略为查询预先获得的动力匹配表,从而输出与所需功率对应的ESC的油门量及第二DC-DC的输出电压值,所述的动力匹配表记录有不同功率需求下,可使系统达到最佳效率所对应的工作电压及ESC油门量。更进一步的,所述的动力匹配表可以通过风洞试验获得,首先获取动力装置在目标工况下等功率输出时的效率曲线,再将曲线上效率最高点所对应的工作电压及对应的油门量大小一一记录;不同的等功率输出分别对应有相应效率曲线,将每条效率曲线中最高点对应的工作电压、油门量、以及功率记录,则获得动力匹配表。
或者所述的联调策略可以通过在动力组上加装相应的力传感器,以追踪动力系统实时最高效率为目标的动态追踪算法,该方法具体可参考CN 108791819A。
进一步的,所述的将原始油门信号与动力系统的功率需求进行映射,可以采用线性映射,将原始油门信号唯一映射到功率区间。
本发明与现有技术相比具有如下有益效果:
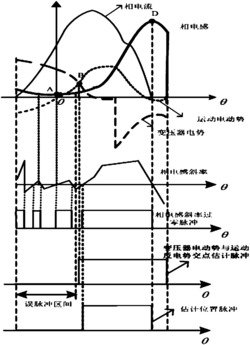
本发明克服了传统无刷电机恒压变油门量的控制方法工作点单一、在非设计点效率低下的缺陷,本发明的方案设计,创新性地基于变压变油门量的思路来对动力系统进行控制。具体而言,可以根据给定的功率需求,对ESC的输入电压及油门信号进行联调控制,从而实现宽工作域下系统都能够高效地输出,其中,工作域是指,动力系统可以进行高效动力输出的功率范围;宽工作域,是指,动力系统可以在大的功率范围均进行高效的动力输出。传统的恒压变油门量的方案,虽然也可以实现从零到当前工作电压下最大功率的输出,但是,在偏离额定功率值的时候,系统的效率往往并不高,因此并不能被认为是本发明所指的宽工作域。本发明的技术效果可由图3佐证,图3为60W等功率输出时动力系统的效率图,以60W功率输出的工作状态来分析,对于该实施例的动力系统,若采用传统的无刷电机控制系统,通常采用22-25V的工作电压以同时保证系统最大功率输出及匹配电池组实际的电压范围。那么由图可知,该工作电压下,动力系统的效率为69%左右,而在使用本发明专利的方案之后,可以将动力系统的工作电压,精确匹配最佳工作电压12.2V,此时动力系统的效率为80.5%,相比较传统方案效率提升了16.67%。
此外,本发明基于变压变油门量这一创造性的无刷电机控制思路,不仅仅只是使电池组以某一特定的电压给ESC供电,以满足某一功率范围的动力输出,而在系统需要其他的功率值输出时,仅经由可调DC-DC电路给ESC供电。对比上述方案,本发明的进步之处在于:由于蓄电池组的电压特性,如果采用蓄电池组直接供电的话,通常不能精准匹配到最佳的电压值,如满电12.6V的锂电池组,工作状态下电压范围在10.5V-12.6V,而实际最佳效率点对应的工作电压可能在11.5V,也就是说会偏离最佳工作点,特别是在等功率输出时系统效率曲线呈现一个明显的峰值时候,采用电池组直接供电的方案,实际工作电压并非最佳工作电压;而采用本发明的方案,不管电池组的实际电压是多少,都通过第二DC-DC电路给ESC供电,可以保证系统的工作电压一直在一个比较精确的值(亦即本发明中提到的动力匹配表中的最佳工作电压)上,可以进一步保证系统效率。
从实际应用对象来看,本发明的方案设计也具有很强的适用性,可在现有传统方案的基础上加以改装,增加可调DC-DC电路及机载控制器模块,即可实现
宽工作域无刷电机控制的目的,具体为:传统方案中,对于多种供电模块,如光伏模块、燃料电池及燃油发电装置,其后通常接入一个较高电压的电池组以满足动力系统大功率输出的需求,基于本发明的方案设计,无需对传统方案中的电池组进行更换操作,直接在原来的电路连线中,增加可调DC-DC电路及机载控制器,即可完成对原方案的升级改造,提高动力系统的性能,使其可以在宽工作域下进行高效的动力输出。
附图说明
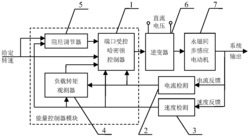
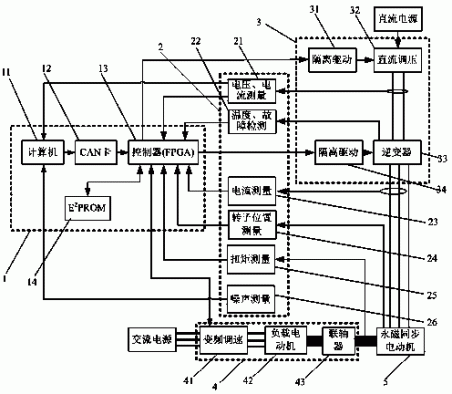
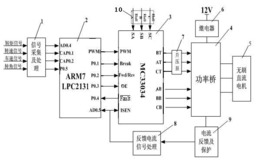
图1是本发明的一种宽工作域无刷电机高效控制系统的结构示意图。
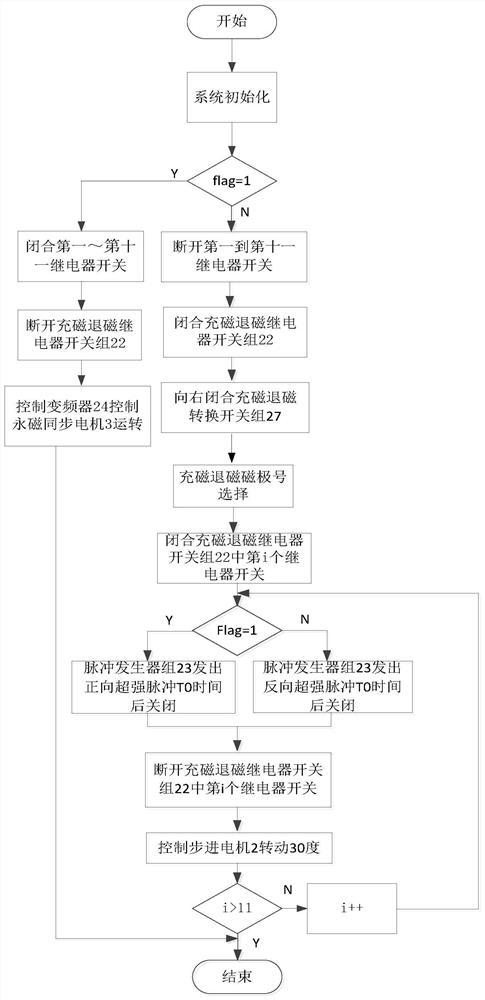
图2是本发明的一种宽工作域无刷电机高效控制系统的工作流程图。
图3为用于建立动力匹配表时的一条等功率输出系统效率曲线(60W功率下等功率输出)。
图中标号含义:
1-供电模块;2-第一DC-DC电路;3-电池组;4-第二DC-DC电路;
5-防反电路;6-ESC(电子调速器);7-BLDC(无刷直流电机);8-机载控制器;
9-通讯链路;10-稳压模块。
具体实施方式
下面结合附图和具体实例对本发明做进一步的说明。
如图1所示,本实例主要提供一种宽工作域无刷电机高效控制系统,包括:供电模块、第一DC-DC电路、电池组、第二DC-DC电路、防反电路、ESC、BLDC、机载控制器、通讯链路、稳压模块;其中,
所述的供电模块,经由第一DC-DC电路,给电池组供电;供电模块可以采用光伏供电、燃料电池供电、或燃油发电机供电,可以为单路或多路并联供电,在具体实施例中,若供电模块采用光伏模块供电,由于光伏电池本身特殊的I-V特性,则通常在供电模块与第一DC-DC电路间增加一MPPT控制器,即最大功率追踪控制器,用于调节电路参数以得到光伏模块的最大功率输出;若供电模块采用燃料电池供电,由于燃料电池的发电效率与其输出的电压值大小有关,通常将其设置在额定的电压下以获得燃料电池组的高效输出,此时,第一DC-DC电路作为直流稳压单元,并给电池组充电;若供电模块采用燃油发电机供电,由于发动机转速波动,输出的电压值也是不稳定的,第一DC-DC电路亦用于直流稳压,并给电池组充电。其中第一DC-DC电路可以采用BUCK型电路、 同步 BUCK型电路或者是BUCK-BOOST型电路,如:可采用LM2577升压数显模块,DSN6000AUD自动升降压模块,LM317降压电路板,AP-D5830A可调降压模块等型号。
所述电池组的电能依次通过第二DC-DC电路、防反电路给ESC供电,ESC驱动BLDC转动;其中,第二DC-DC电路为可调DC-DC电路,可根据输入的信号改变输出的电压值,可以采用BUCK型电路、 同步 BUCK型电路或者是BUCK-BOOST型电路,如:可采用AP-D5830A,该DC-DC降压模块输出恒压直流,具有外接电压电流模拟信号输入端,可用单片机控制调整电压和电流;所述的防反电路主要用于防反接,采用常规的防反电路即可,如采用麦克斯低压差理想二极管,最大工作电流15A,当导通时,MOSFET两端的压降仅为20毫伏;也可采用嘉迪100V50A的理想二极管,其静态工作电流为0.6-1.5毫安,双MOS的设计,仅0.75毫欧的导通内阻;或采用如下:包括至少一MOS管及一二极管控制器,所述MOS管内部包括至少一二极管, 所述MOS管的S极设置于所述防反电路的输入端,所述MOS管的D极设置于所述防反电路的输出端,所述二极管控制器的输入端与所述MOS管的S极连接,所述二极管控制器的输出端与所述MOS管的D极连接,所述二极管控制器的驱动端与所述MOS管的G极连接。
所述通讯链路用于传递飞控系统输出的原始油门值给机载控制器;
所述的机载控制器,主控芯片可以采用stm32,51,AVR,PIC等类型的单片机,配合相应的外围电路,如电压电流传感器--LTC2944电压电流测量模块,可获取来自第一DC-DC电路的输入输出电压电流信息及电池组输出电压电流信息,进行实时监控;并可将通讯链路传递来的原始油门值与动力系统的功率需求进行对应,根据当前飞行器的功率需求与预先设定的功率阈值的关系,输出第一路控制信号给ESC,用于控制ESC的油门量,同时输出第二路控制信号给第二DC-DC电路,用于输出匹配的电压值;其中预先设定的功率阈值通常可由本领域内技术人员根据经验或根据任务需求来设置,如在没有经验或无具体任务需求的情况下,可以按照动力系统最大持续工作功率的15%来设置。如具体实施例中,动力系统最大持续工作功率为200W,那么可设置功率阈值为200W的15%,即30W。
所述的稳压模块,用于给机载设备提供稳定的电源,可以采用集成电路,将电池组的输出电压通过LT8632芯片转换为 12V电压和5V电压,并带有滤波电路和隔离电路等保护电路,使各输出电压线性稳定。
如图2所示为采用本实例系统所实现的工作流程图,用于描述基于上述系统实现宽工作域无刷电机高效控制的方法,当系统初始化,此时输入ESC的油门信号为零,同时控制第二DC-DC电路以基准电压输出,ESC执行自检程序。
1)机载控制器通过通讯链路接收飞控系统输出的原始油门信号;将原始油门信号与动力系统的功率需求进行映射,从而获得此时动力系统的功率需求;
2)对动力系统的功率需求进行判定:
当功率需求小于等于预先设定的功率阈值时,机载控制系统输出ESC的控制信号以改变实际的油门值,同时控制第二DC-DC电路以基准电压供电;
当功率需求高于预先设定的功率阈值时,机载控制系统按照联调策略,同时改变ESC的油门量及第二DC-DC电路的输出电压值,以实现大功率动力输出。
在一具体实施例中,功率阈值设定为30W,其物理含义为当系统所需的功率需求小于等于30W的时候,采用恒定电压调油门的方式进行控制,而当实际功率需求大于30W的时候,采用联调策略,同时对工作电压及ESC输入量进行联调控制。
所述的功率阈值为提前输入的值,用于决定第二DC-DC电路是否变压的,通常可取动力系统最大持续工作功率的15%;所述的基准电压为第二DC-DC电路实际输出的最低电压,由ESC支持的最低电压所确定,即可取ESC所需的最低电压,在一具体实施例中,ESC支持3S-6S的锂电输入,则基准电压设置为3S锂电的最低工作电压11.1V;
所述的联调策略,可以是通过查询已知的动力匹配表,从而对应输出ESC的油门量及第二DC-DC的输出电压值;也可以是通过在动力组上加装相应的力传感器,以追踪动力系统实时最高效率为目标的动态追踪算法;
上述的动力匹配表,记录了不同功率需求下,可使系统达到最佳效率所对应的工作电压及ESC油门量,可以提前通过风洞试验获得动力装置在目标工况下等功率输出时的效率曲线,将曲线上效率最高点所对应的工作电压及对应的油门量大小、功率一一记录,不同等功率输出的效率曲线均如此,则可以获得动力匹配表。
下面,结合图3 等功率输出系统效率图来详细说明,动力匹配表的建立流程:
使用动力测试架,不断调节动力系统的输入电压及ESC油门量以保证等功率输出。在一具体实施例中,如图3的效率表,使动力系统始终保持等功率60W输出,得到动力系统在不同工作电压下的效率图。在图3中,系统的工作电压从10.5V变化至24V,虽然输出的功率不变,但是可以看到动力系统的最大效率点在工作电压为12.2V的时候出现,系统效率超过了80%。那么,即可记录:动力系统60W等功率输出时,最优的工作电压应当为12.2V,此时的系统效率为80.5%。重复类似的工作,可以得到不同的工况下,不同的动力系统输出功率时,最优的工作电压分别是多少,由此即可得到上述的动力匹配表。
所述的动态追踪算法,可以参见CN 108791819A中的相关内容,在上述专利中,公开了适用于无人机的动态拉力检测装置与检测方法,通过自动变距的方式实现追踪系统的最佳效率值,实质是追踪整个动力系统的最佳桨效值,即每瓦的功率输出可以带来多少的动拉力。同样的思路可以用于本发明的动态追踪算法的建立,因为动力系统不断变化工作电压及油门输出量并保证输出功率基本稳定,此时由于不同的工作电压下动力系统的效率存在差异,动态拉力检测装置检测到的实时动拉力也会有所差异,从中不断趋近同一功率下,实时拉力最大的值即可实现动态追踪系统最高效率的功能。
上述的将原始油门信号与动力系统的功率需求进行映射,在一具体实施例中,可以直接采用线性映射,如将0-100%的原始油门信号,线性映射到0-200W的功率区间,即0%的原始油门信号对应0W的功率需求;30%油门信号,对应60W的功率需求;60%的原始油门信号对应120W的功率需求;100%的原始油门信号,对应200W的功率需求。
采用本发明的控制系统和方法,可以保证ESC可以始终工作在最佳的工作电压点(而并非仅工作在最佳工作电压区间),使得整个动力系统在宽工作域内均能保持高效的动力输出。
一种宽工作域无刷电机高效控制系统及控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0