








专利摘要
本发明公开一种柔性微动机械手,该机械手特征在于主要包括:一个压电陶瓷驱动器、一个球形接头、一个“H”字形连接梁、一个“U”字形刚性支撑梁和一个底座,以及两个柔性支链、两个“L”字形连接梁和两个夹持末端;所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于所述“U”字形刚性支撑梁的中间内侧壁上,且使所述球形接头顶在所述“H”字形连接梁的“一”字形梁下端面的中间位置上,构成赫兹接触;所述“U”字形刚性支撑梁安装在“U”字形结构的底座上;所述两个柔性支链、两个“L”字形连接梁和两个夹持末端均以所述球形接头和压电陶瓷驱动器为中心线,左右对称布装在机械手的左右两侧。
权利要求
1.一种柔性微动机械手,其特征在于该机械手主要包括:一个压电陶瓷驱动器、一个球形接头、一个“H”字形连接梁、一个“U”字形刚性支撑梁和一个底座,以及两个柔性支链、两个“L”字形连接梁和两个夹持末端;
所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于所述“U”字形刚性支撑梁的中间内侧壁上,且使所述球形接头顶在所述“H”字形连接梁的“一”字形梁下端面的中间位置上,构成赫兹接触;
所述底座为“U”字形结构,其水平横梁的宽度比所述“U”字形刚性支撑梁对应部分的宽度宽之外,其余形状尺寸与所述“U”字形刚性支撑梁一致;所述“U”字形刚性支撑梁安装在“U”字形结构的底座上,且使两者的水平横梁的上端面对齐;
所述“L”字形连接梁包括左连接梁和右连接梁,左右形状对称一致;所述柔性支链包括左柔性支链和右柔性支链,左右两个柔性支链结构一样;其中左柔性支链布装连接在所述“H”字形连接梁的左侧“1”字形竖梁的左侧与所述“U”字形刚性支撑梁的左侧“1”字形竖梁的内侧之间;所述夹持末端包括左夹持末端和右夹持末端,两个夹持末端均为直角扇形结构,且左右形状结构对称一致,其弧形边为空置端,两个直边相互垂直,一个直边水平放置,另一个直边竖直放置,两个竖直放置的直边为工作端,两个水平放置的直边为连接端,其中左夹持末端水平布装在左柔性支链的正上方,左夹持末端水平放置的直边底面左侧通过左连接梁与所述“U”字刚性支撑梁的左侧“1”字形竖梁的外侧连接,左夹持末端水平放置的底面右侧直接与所述“H”字形连接梁的左侧“1”字形直梁的上方连接;所述右柔性支链、右连接梁和右夹持末端以所述球形接头和压电陶瓷驱动器为中心线,左右对称布装在机械手的右侧;
所述柔性支链由两个水平横梁构成,两个水平横梁自上而下布置,每个水平横梁上均开有两组半圆凹槽,每组半圆凹槽为两个,上下对称分布在水平横梁左右两端的内外壁上;所述“H”字形连接梁两个“1”字形竖梁上半部分的左右侧壁上各开有一组半圆凹槽,每组半圆凹槽为两个,结构相同,左右对称;所述“L”字形连接梁竖直部分上端的左右侧壁上均对称开有一个半圆凹槽,所述“L”字形连接梁水平部分的上下侧壁上均对称开有一个半圆凹槽;所述的半圆凹槽形状结构完全相同。
2. 根据权利要求1所述的柔性微动机械手,其特征在于所述柔性支链、“H”字形连接梁、“U”字形刚性支撑梁、“L”字形连接梁以及夹持末端为一体化结构,由整块材料利用线切割整体加工方法加工制成。
说明书
技术领域
本发明涉及机械领域的微/纳米操作系统,具体为一种具有两个夹持末端的柔性微动机械手。
背景技术
微机械技术是微纳米技术的重要分支。应用扫描探针显微镜技术进行分子或原子量级的操作、改型加工处理、制作微型机械零部件乃至微机械整体、生物工程领域中的动植物细胞转基因注射、医疗领域中利用微小的剪刀、微型摄像机、微型传感器等专用微型医疗器械进行微创伤侵入性医疗手术这些情况的实现,都是建立在微操作系统或装置的精密性基础之上的。微纳米级操作系统的定位精度是上述各类微操作成功的关键。随着人们对微观世界研究的深入,精密作业逐渐超出了人类的操作极限,而融合了机械、电子、自动化及信息处理技术的机器人技术在微观领域的引入和发展是人类日益迫切的要求。压电陶瓷驱动设备的出现使得微米乃至纳米级定位精度和分辨率的驱动控制可以实现,从而使得具有在微纳米尺度上进行精密作业能力的微操作机器人技术也应运而生,而作为微操作机器人的主要执行部件,具有精密定位能力和准确夹持作用力的机械手的研究也得到了各国研究人员的重视。
德国PI,英国Queensgate等公司均已生产了基于压电陶瓷驱动的纳米级微操作手的成形产品,主要用于光线系统检测、微加工、微装配等场合。J.M.Breguet等,大行程、高分辨率、多自由度压电陶瓷驱动器的新型设计(J.M.Breguet,R.Clavel,New designs for long range,highresolution,multi-degree-of-freedom piezoelectric actuators,Proceedings of the 6th International Conference on New Actuator,June,1998:198-201.)中报导了瑞士联邦工学院研制的六自由度微操作手;P.Kallio等,压电陶瓷驱动的3自由度并联微操作器(P.Kallio,M,Lind,Q.Zhou,H.N.Koivo,A 3-DOF piezo-hydraulic parallel micromanipulator,Proceedings of the IEEE International Conference on Robitics andAutomation,Leuven,Belgium,May,1998:1823-1828.)中报道了芬兰坦佩雷工业大学研制的三自由度并联微操作手;Mohd Nashrul等,一种基于压电陶瓷驱动的柔性微夹持器的新型设计(Mohd Nashrul Mohd Zubir,BijanShirinzadeh,Yanling Tian,A new design of piezoelectric drivencompliant-based microgripper for micromanipulation,Mechanism andMachine Theory,2009,2248-2264.)中报道了一种基于压电陶瓷驱动的柔性并联微夹持器的优化设计和性能分析。在这一领域,我国的科研工作者们也做出了一定的成绩,如W.Dong等,采用双压电陶瓷驱动器驱动的精密柔性并联定位机构的设计(W.Dong,L.N.Sun,Z.J.Du.Design of aprecision compliant parallel positioner driven by dual piezoelectricactuators.Sensor and Actuators A,2007,135:250-256)中报导的哈尔滨工业大学研制的压电陶瓷驱动的六自由度并联微操作手;杨国兴等,基于有限元方法的柔性铰链式微夹持器优化设计(中国机械工程,2006年,17卷10期,1074-1078)中介绍了以柔性铰链为转动副的微夹持器。但上述微动夹持器有的采用刚柔结合的结构方式,且柔性结构所占比例相对较少,较大的位移输出主要由刚性宏动环节实现,性能受到限制;有的则多采用由压电陶瓷驱动器直接驱动的方式,中间缺少放大环节,直接限制了该类微动夹持器末端执行器所能提供的变形量,不能满足实际需要。
发明内容
针对现有技术的不足,本发明拟解决的技术问题是,提供一种柔性微动机械手。该机械手器采用柔性并联结构、单自由度柔性铰链和压电陶瓷驱动器驱动技术,具有两个夹持末端,可应用于微/纳操作机械系统,具有结构简单、高刚度、高精度、低惯量、结构紧凑、无误差积累、无机械摩擦、无间隙,且便于加工制造和工业化实施等优点。
本发明解决所述技术问题的技术方案是:设计一种柔性微动机械手,其特征在于该机械手主要包括:一个压电陶瓷驱动器、一个球形接头、一个“H”字形连接梁、一个“U”字形刚性支撑梁和一个底座,以及两个柔性支链、两个“L”字形连接梁和两个夹持末端;
所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于所述“U”字形刚性支撑梁的中间内侧壁上,且使所述球形接头顶在所述“H”字形连接梁的“一”字形梁下端面的中间位置上,构成赫兹接触;
所述底座为“U”字形结构,其水平横梁的宽度比所述“U”字形刚性支撑梁对应部分的宽度宽之外,其余形状尺寸与所述“U”字形刚性支撑梁一致;所述“U”字形刚性支撑梁安装在“U”字形结构的底座上,且使两者的水平横梁的上端面对齐;
所述“L”字形连接梁包括左连接梁和右连接梁,左右形状对称一致;所述柔性支链包括左柔性支链和右柔性支链,左右两个柔性支链结构一样;其中左柔性支链布装连接在所述“H”字形连接梁的左侧“1”字形竖梁的左侧与所述“U”字形刚性支撑梁的左侧“1”字形竖梁的内侧之间;所述夹持末端包括左夹持末端和右夹持末端,两个夹持末端均为直角扇形结构,且左右形状结构对称一致,其弧形边为空置端,两个直边相互垂直,一个直边水平放置,另一个直边竖直放置,两个竖直放置的直边为工作端,两个水平放置的直边为连接端,其中左夹持末端水平布装在左柔性支链的正上方,左夹持末端水平放置的直边底面左侧通过左连接梁与所述“U”字刚性支撑梁的左侧“1”字形竖梁的外侧连接,左夹持末端水平放置的底面右侧直接与所述“H”字形连接梁的左侧“1”字形直梁的上方连接;所述右柔性支链、右连接梁和右夹持末端以所述球形接头和压电陶瓷驱动器为中心线,左右对称布装在机械手的右侧;
所述柔性支链由两个水平横梁构成,两个水平横梁自上而下布置,每个水平横梁上均开有两组半圆凹槽,每组半圆凹槽为两个,上下对称分布在水平横梁左右两端的内外壁上;所述“H”字形连接梁两个“1”字形竖梁上半部分的左右侧壁上各开有一组半圆凹槽,每组半圆凹槽为两个,结构相同,左右对称;所述“L”字形连接梁竖直部分上端的左右侧壁上均对称开有一个半圆凹槽,所述“L”字形连接梁水平部分的上下侧壁上均对称开有一个半圆凹槽;所述的半圆凹槽形状结构完全相同。
与现有技术相比,本发明柔性微动机械手具有如下优点:
1.微动机械手的柔性机构可利用线切割一体化加工技术整体加工而成,免于装配、无间隙、无摩擦、不需润滑,有利于实现微/纳米级高精度定位。
2.微动机械手采用柔性并联结构,具有高刚度、高精度、低惯量、结构紧凑、无误差积累等优点。
3.微动机械手采用单自由度柔性铰链作为传动机构,具有无机械摩擦、无间隙等优点。另外,基于材料的弹性变形,柔性铰链所产生的转角以及执行器末端工作空间均很微小,可以有效消除并联机构固有的非线性等缺点。
4.微动机械手采用压电陶瓷驱动器推动驱动环节,可实现微/纳操作过程中微小、易碎等构件的夹持定位,可作为微/纳操作系统的辅助定位机构,实现微量进给和精密定位。
附图说明
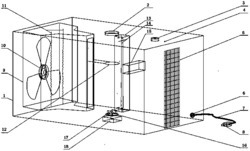
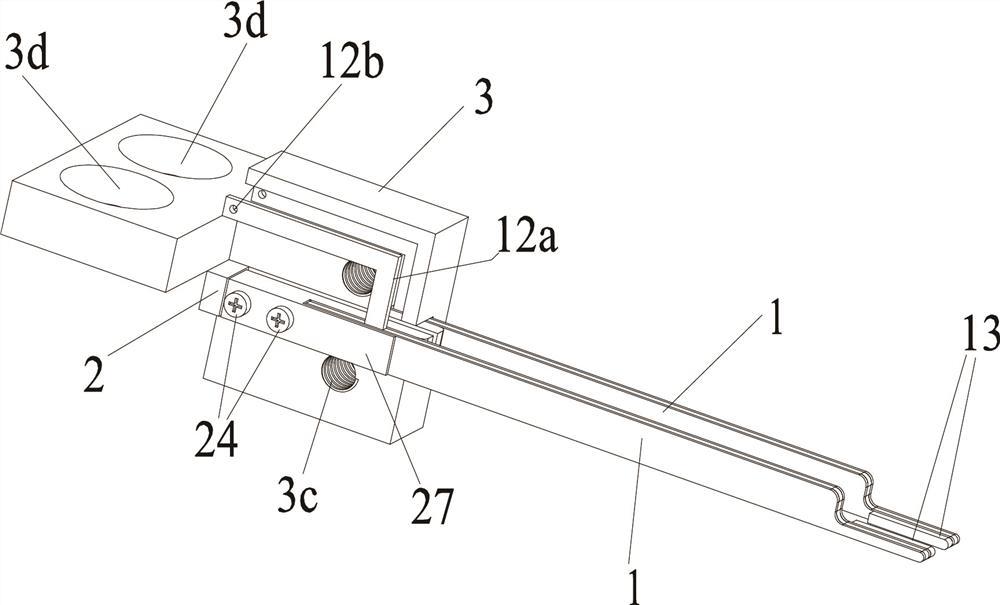
图1是本发明柔性微动机械手一种实施例的整体结构示意图;
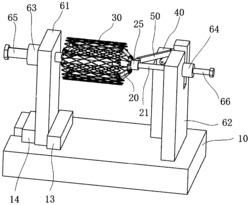
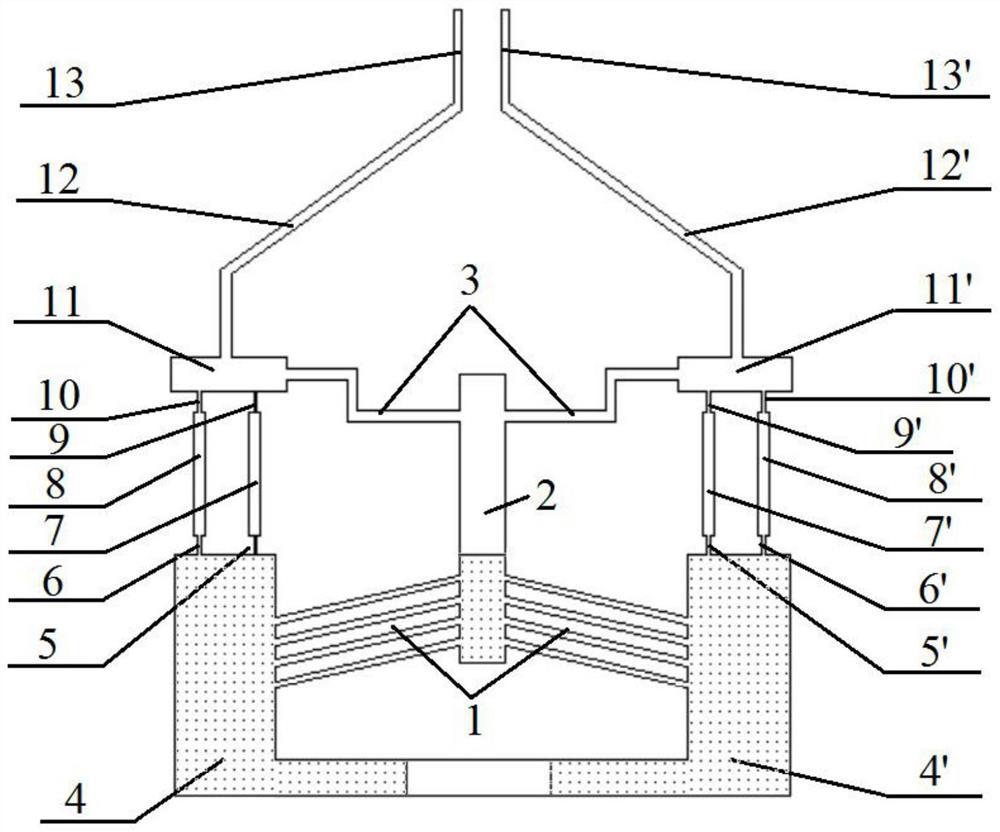
图2是本发明柔性微动机械手一种实施例的主体结构示意图;
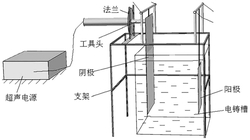
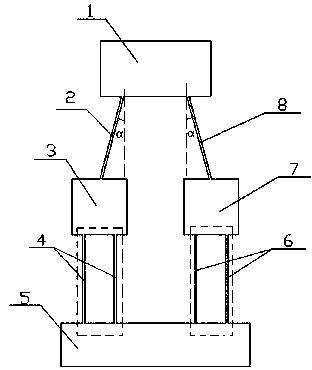
图3是本发明柔性微动机械手一种实施例的底座结构示意图;
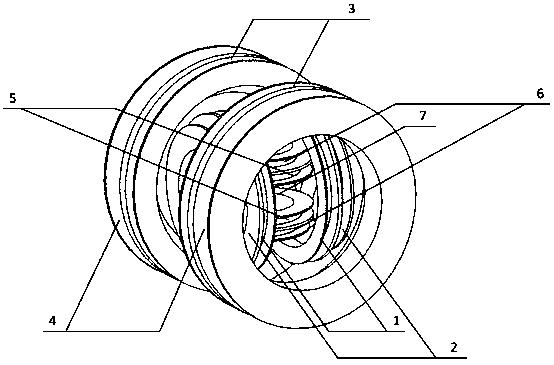
图4是本发明柔性微动机械手一种实施例的主体结构(图2)横截面一体化结构示意图。
具体实施方式
以下结合较佳实施例及其附图,对本发明进一步详细描述如下。
本发明设计的柔性微动机械手(简称机械手,参见图1-4),主要包括两个结构一样的柔性支链1、一个底座2、一个“U”字形刚性支撑梁3、一个“H”字形连接梁4、左右对称的两个“L”字形连接梁5、左右对称的两个夹持末端6、一个压电陶瓷驱动器7和一个球形接头8;
本发明所述的底座2实施例为两个竖直梁和一个水平横梁构成的“U”字形结构(参见图3),其两个竖直梁的上端位置各开有一个螺纹孔(记为螺纹孔21、22),水平横梁上开有两个螺纹孔(记为23、24),四个螺纹孔的开孔位置构成梯形的顶点。
本发明所述柔性支链1为结构一样的两个,分别为左柔性支链11和右柔性支链12,其以机械手的中心线为对称轴左右对称水平安装于“H”字形连接梁4与“U”字形刚性支撑梁3之间,且使“H”字形连接梁4的两个“1”字梁或竖梁的下端面与左右柔性支链11和12的下端面平齐,具体说,左柔性支链11位于机械手中心线的左侧,其右端与“H”字形连接梁4的左侧“1”字梁下半部分的外侧壁水平连接,左端与“U”字形刚性支撑梁3的内侧壁水平连接;所述右柔性支链12位于机械手中心线的右侧,其左端与“H”字形连接梁4的右侧“1”字梁下半部分的外侧壁水平连接,右端与所述“U”字形刚性支撑梁3的内侧壁水平连接;所述柔性支链1均由两个开有半圆凹槽的水平横梁构成,两个水平横梁自上而下分布,每个水平横梁上均开有两组半圆凹槽,每组半圆凹槽为两个,上下对称分布在水平横梁左右两端的内外两个侧壁上,具体说,分布在柔性支链11上横梁的两对半圆凹槽从左向右标记为111、112,分布在柔性支链11下横梁的两对半圆凹槽从左向右标记为113、114;分布在柔性支链12上横梁的两对半圆凹槽从左向右标记为121、122,分布在柔性支链12下横梁的两对半圆凹槽从左向右标记为123、124,所述八组半圆凹槽形状结构完全相同,每组半圆凹槽中的两个凹槽均关于自身所在水平横梁的中线上下对称分布。
本发明所述“U”字形刚性支撑梁3沿机械手的中心线竖直放置,其由左右两个竖梁和一个水平横梁组成,左右两个竖梁的中间安装“H”字形连接梁4,左柔性支链11和右柔性支链12分别布置在“U”字形刚性支撑梁3的左右两个竖梁与“H”字形连接梁4的左右两个竖梁之间的两个空间内;在所述“U”字形刚性支撑梁3左右两个竖梁上开有两个螺纹孔31、32,所述螺纹孔31、32圆心位于所述柔性支链1的上下对称中线上,在水平横梁上从左向右也开有两个螺纹孔33、34,所述螺纹孔33、34圆心分别位于左右柔性支链11、12水平横梁的左右对称中线上,所述四个螺纹孔31、32、33、34尺寸相同,分布位置分别和底座2上的螺纹孔21、22、23、24一一对应,所述“U”字形刚性支撑梁3和底座2通过所述两组螺纹孔用螺栓刚性连接,所述“U”字形刚性支撑梁3水平横梁的内外侧壁上开有贯通的螺纹孔35,用于将所述压电陶瓷驱动器7固定于“U”字形刚性支撑梁3和“H”字形连接梁4之间。
本发明所述“H”字形连接梁4沿机械手的中心线竖直放置,位于左右柔性支链11、12之间,所述“H”字形连接梁由左右对称的两个“1”字梁和中间的一个“一”字梁组成,所述“H”字形连接梁4的两个“1”字梁下半部分外侧壁分别和左右柔性支链11、12水平连接,两个“1”字梁上半部分上均开有一组半圆凹槽,每组半圆凹槽为两个,结构相同,分别左右对称分布在所述“1”字梁上半部分左右两个侧壁上,所述两对半圆凹槽从左向右标记为41、42,所述两个“1”字梁的上端面与所述两个扇形夹持末端6竖直连接,下端面与左右柔性支链11和12的下端面平齐;
本发明所述“L”字形连接梁包括 形连接梁51和 形连接梁52,两者关于机械手的中心线左右对称设置在所述“U”字形刚性支撑梁3的外侧,竖直部分上端左右侧壁分别对称开有一组凹槽511和521,水平部分上下侧壁分别对称开有一组凹槽512和522,所述 形连接梁51和 形连接梁52的竖直部分上端与所述两个夹持末端6竖直连接,所述 形连接梁51水平部分的右端面与所述“U”字形刚性支撑梁3外侧壁连接,所述 形连接梁52水平部分的左端面与所述“U”字形刚性支撑梁3外侧壁连接。
所述夹持末端6包括左夹持末端61和右夹持末端62,两个夹持末端均为直角扇形结构,且左右形状结构以机械手的中心线为对称轴对称一致,左右对称设置,其弧形边为空置端,两个直边相互垂直,一个直边水平放置,另一个直边竖直放置,所述两个竖直直边为工作端,位于机械手内部,靠近其中心线且左右对称,用于夹持物体;两个水平放置的直边为连接端,其中所述的左夹持末端61的水平直边的右端下侧面与所述“H”字形连接梁4的左“1”梁上端连接,左端下侧面与所述 形连接梁51竖直部分上端连接,同样道理,所述的右夹持末端62与左夹持末端61结构对称一致,其水平直边的左端下侧面与所述“H”字形连接梁4的右“1”梁上端连接,右端下侧面与所述 形连接梁52竖直部分上端连接。
本发明所述压电陶瓷驱动器7的顶端或一端安装有(螺纹刚性连接)一个球形接头8(参见图1),而其尾部或另一端顶在所述“U”字形刚性支撑梁3水平横梁的内侧壁上并通过螺纹通孔35与“U”字形刚性支撑梁3螺栓连接;所述球形接头8顶在“H”字形连接梁4的“一”字形梁的下端面中间位置上,实现赫兹接触。
所述底座2为“U”字形结构,左右两侧竖直梁尺寸与所述“U”字形刚性支撑梁3对应部分尺寸一致,而水平横梁则比所述“U”字形刚性支撑梁3对应部分宽;所述底座2上分布有四个螺纹孔21、22、23、24,螺纹孔21、22、23、24与所述“U”字形刚性支撑梁3上的螺纹孔31、32、33、34位置一一对应,且尺寸相同,通过所述一一对应的螺纹孔和螺栓来实现两者的刚性连接。
本发明柔性微动机械手的进一步特征是,除了压电陶瓷驱动器5和球形接头8之外的其他结构,包括所述的两个柔性支链1、“H”字形连接梁4、“U”字形刚性支撑梁3和两个“L”字形连接梁51、52以及两个夹持末端6为一体化结构,由整块材料利用线切割(WEDM)整体加工方法加工制成(参见图4)。
本发明柔性微动机械手的工作原理和过程如下:驱动压电陶瓷驱动器7,使其发生伸长,推动“H”字形连接梁4的“一”字形梁,在“一”字形梁带动下,连接于其左、右两侧的柔性支链11、12上的单自由度柔性铰链(半圆凹槽)111、112、113、114和121、122、123、124发生弯曲弹性变形,使得“H”字形连接梁4产生向上的直线移动,从而推动连接于“H”字形连接梁4上方的两个扇形夹持末端6水平直边与“H”字形连接梁4连接位置向上移动,移动过程中,作用力经扇形夹持末端6水平直边向两侧 形连接梁51和 形连接梁52传递,而由于 形连接梁51和 形连接梁52的水平端分别通过“U”字形刚性支撑梁3的两个竖梁与底座2刚性固连,起到了一定的制约作用,从而使得相应位置上的单自由度柔性铰链(半圆凹槽)41、511、512和42、521、522也发生弯曲弹性变形,牵引着两个扇形夹持末端6水平直边产生方向向下的偏转,这样左夹持末端61的竖直直边向上平动的同时产生逆时针方向的偏转,而右夹持末端62的竖直直边向上平动的同时产生顺时针方向的偏转,即柔性微动机械手的左右两个夹持末端61、62产生相互分离的运动;撤销施加在压电陶瓷驱动器7上的驱动,压电陶瓷驱动器7长度缩减,作用在“H”字形连接梁4、 ”形连接梁51和 形连接梁52上的作用力逐渐消失,各个位置上的单自由度柔性铰链在材料自身弹性的作用下逐渐恢复到原始状态,使得柔性微动机械手的左右两个夹持末端61、62产生相互接近的运动,从而实现对物体的夹持作用。
本发明柔性微动机械手增加了柔性环节,可以有效的提高末端执行器的实际输出,可作为微纳操作系统的辅助操作机构,实现快速微量进给和精密定位。
本发明未述及之处适用于现有技术。
需要补充说明的是,本发明描述结构所述的“上、下”、“前、后”、“左、右”等零部件的安装方位词是依据实施例附图所示或习惯而言的,只具有相对性,或者仅是为了叙述方便,不代表该安装位置的唯一性和必须性。
一种柔性微动机械手专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0