








专利摘要
一种内窥镜类技术领域的用于胃肠道的微型机器人,包括:轴向伸缩机构、头部径向钳位机构和尾部径向钳位机构,其中:头部径向钳位机构由径向动力装置与轴向伸缩机构相连,径向钳位机构包括:相互啮合的机构输出齿轮和调速输出齿轮、至少3条均匀分布于机构输出齿轮外圆周的螺旋线腿和钳位调速装置。本发明体积小、结构简单、控制简单,成本低,性能可靠,比现有的机构具有更大的运动行程,能够适应人体胃肠道环境,可以有效运动,回避了传统的内窥镜以及胶囊内窥镜的不足之处。
权利要求
1.一种用于胃肠道的微型机器人,其特征在于,包括:轴向伸缩机构、头部径向钳位机构和尾部径向钳位机构,其中:头部径向钳位机构由径向动力装置与轴向伸缩机构的一端相连,尾部径向钳位机构由尾部动力装置与轴向伸缩机构的另一端相连;
径向钳位机构和尾部径向钳位机构均包括:相互啮合的机构输出齿轮和调速输出齿轮、至少3条均匀分布于机构输出齿轮外圆周的螺旋线腿和钳位调速装置,其中:每条螺旋线腿的根部有与机构输出齿轮相啮合的齿轮部,机构输出齿轮旋转实现各条螺旋线腿的展开和闭合,钳位调速装置的输入端与径向动力装置或尾部动力装置相连以获得驱动力,输出端与调速输出齿轮相连。
2.根据权利要求1所述的机器人,其特征是,所述的径向动力装置包括:径向驱动电机及套在该电机外部的径向电机套筒,其中:径向电机套筒套与轴向伸缩机构相连。
3.根据权利要求1所述的机器人,其特征是,所述的螺旋线腿的螺旋曲线为阿基米德曲线。
4.根据权利要求1所述的机器人,其特征是,所述的钳位调速装置的前端面设有调速前板,后端面设有径向机构后板,侧面设有调速套筒,其中:调速前板的另一面固定机构输出齿轮、调速输出齿轮和螺旋线腿。
5.根据权利要求1所述的机器人,其特征是,所述的螺旋线腿的前侧设置有钳位机构前板。
6.根据权利要求1-5任一项所述的机器人,其特征是,所述的轴向伸缩机构包括:轴向机构中板、轴向调速装置、螺杆、连接件、作为导向件的导轨、轴向驱动装置和轴向机构后板,其中:螺杆、导轨和轴向驱动装置均固定于轴向机构中板和轴向机构后板两个平面之间,轴向驱动装置的输出端与轴向调速装置相连,轴向调速装置的输出端与螺杆相连,连接件的第一连接部套接于螺杆上,第二连接部套接于导轨上,第三连接部套接径向动力装置使得该动力装置获得轴向的驱动力。
7.根据权利要求1所述的机器人,其特征是,所述的轴向驱动装置包括:轴向驱动电机及套在该电机外部的轴向电机套筒。
8.根据权利要求6所述的机器人,其特征是,所述的连接件的第一连接部是与螺杆的螺纹相配合的螺孔结构,第二连接部和第三连接部分分别是与导轨和径向动力装置的外部尺寸相适应的通孔结构。
9.根据权利要求6所述的机器人,其特征是,所述的轴向机构中板和轴向机构后板之间设有用于固定两者距离的固定挡板。
10.根据权利要求6所述的机器人,其特征是,所述的尾部动力装置设置于轴向伸缩机构的轴向机构中板和轴向机构后板两个平面之间。
说明书
技术领域
本发明涉及的是一种内窥镜类技术领域的装置,具体是一种用于胃肠道的微型机器人。
背景技术
作为主要的消化道疾病,消化性溃疡的发病率为10%~20%,是上消化道出血最常见的原因。尽管现代医学技术已提升,但消化性溃疡的死亡率仍很高,为5%~10%。对于无溃疡病史、临床表现不典型而诊断困难的病患,在出血24~48小时内进行急诊内镜检查,能够提高确诊率。内镜检查能够观察到小肠内的出血部位,通过出血状态判断是否进行内镜下止血治疗。老年患者发生溃疡穿孔的死亡率高达30%~50%。
纤维或电子内镜对于上消化道和大肠病变基本可以做出诊断,但小肠病变是内镜检查的“终极障碍”。尽管推进式小肠镜的应用,可窥视空肠有无病变,但操作非常困难,更远部位的小肠病变无法诊断,而且病人极端不舒服,引起诸多并发症:咽部擦伤、食管贲门粘膜撕裂伤、下颌关节脱臼、颌下腺肿胀、麻醉药过敏、颜面部皮下出血、急性胃扩张、胃肠道穿孔和出血、吸入性肺炎甚至猝死等。因此,这项技术很难被接受。探条式小肠镜可以检查空肠和回肠上部,但操作时间长、观察存在盲区。肠带诱导式小肠镜可以观察全部小肠,但术前准备复杂、耗时长、病人痛苦大。小肠低张双重造影插管时患者痛苦、检查时间较长、要接触较多的X射线。
经过对现有技术的检索发现,专利文献号EP1885231,记载了一种Capsule type micro-robot moving system(胶囊型微型机器人移动机构),设计了一种在胃肠道内通过划桨方式前进的机构。机构通过电机驱动螺杆,螺杆的转动带动划桨机构的前进与后退。在划桨机构上有六条可以来回摆动的腿结构,在划桨机构后退的过程中,由于腿与胃肠内壁存在摩擦力而打开,从而驱动机器人前进。反过来,在划桨机构前进时,腿由于与胃肠道的作用力而收起,不会造成机器人的后退。但是由于腿的长度很短,难以保证运动的有效性,并且这样的结构只能使机器人前进而无法后退。
专利文献号US8,322,469B2,记载了一种Bidirectional moving micro-robot system(双向移动微型机器人系统),设计了分两节的微型胃肠道机器人系统。机构两端分别有五条可以展开与闭合的腿结构,可以分别固定两端的机构。两端分别有一个电机,可以带动一个圆盘转动,该圆盘可以带动5条同时展开与闭合。两段的机构通过弹簧连接,所以机器人中间可以向任何方向偏转,其中一段机构在弹簧内有可旋转的机构,该机构通过相对弹簧的旋转实现轴向的运动,从而改变两段机构之间的距离。该机器人通过两端腿结构的交替开合,以及中间结构的伸缩,实现机器人在胃肠道内爬行。但是由于该机器人的腿较短,难以在胃肠道内固定住机构,不能保证机器人的有效前进,同时在弹簧向一侧弯曲时,中段的伸缩机构很有可能卡死,使得机器人无法进行下一个动作。
综上所述,现阶段急需一种能够有效地在胃肠道内爬行的机构,能够在在运动过程中尽可能减少对人体造成的创伤。
发明内容
本发明针对现有技术存在的上述不足,提供一种用于胃肠道的微型机器人,能够保证在人体胃肠道内的驻留以及向前或向后的运动,同时保护胃肠道不受机器人移动所造成的物理创伤。
本发明是通过以下技术方案实现的,本发明包括:轴向伸缩机构、头部径向钳位机构和尾部径向钳位机构,其中:头部径向钳位机构由径向动力装置与轴向伸缩机构的一端相连,尾部径向钳位机构由尾部动力装置与轴向伸缩机构的另一端相连。
所述的径向钳位机构和尾部径向钳位机构均包括:相互啮合的机构输出齿轮和调速输出齿轮、至少3条均匀分布于机构输出齿轮外圆周的螺旋线腿和钳位调速装置,其中:每条螺旋线腿的根部有与机构输出齿轮相啮合的齿轮部,机构输出齿轮旋转实现各条螺旋线腿的展开和闭合,钳位调速装置的输入端与径向动力装置或尾部动力装置相连以获得驱动力,输出端与调速输出齿轮相连。
螺旋线腿的根部有齿轮部且与机构输出齿轮相啮合,使得螺旋线腿的总长度增加,能够适应肠道的粘滑环境,增加与肠道的接触面积,并无尖角接触,可以保护肠壁。
所述的径向动力装置包括:径向驱动电机及套在该电机外部的径向电机套筒,其中:径向电机套筒套与轴向伸缩机构相连。
所述的机构输出齿轮、调速输出齿轮和各条螺旋线腿均固定于同一平面。
所述的螺旋线腿的螺旋曲线为阿基米德曲线。螺线在生物中广泛存在,并具有一定的弹性。基于阿基米德螺旋线设计的腿式结构在旋转打开和关闭过程中具有一定的弹性,有利于应力的均匀分布和释放,防止戳伤肠壁。
所述的钳位调速装置为钳位减速齿轮机构,为五级减速,且减速齿轮为环形布置。
所述的钳位调速装置的前端面设有调速前板,后端面设有径向机构后板,侧面设有调速套筒,其中:调速前板的另一面固定机构输出齿轮、调速输出齿轮和螺旋线腿。
所述的螺旋线腿的前侧设置有钳位机构前板。
所述的轴向伸缩机构包括:轴向机构中板、轴向调速装置、螺杆、连接件、作为导向件的导轨、轴向驱动装置和轴向机构后板,其中:螺杆、导轨和轴向驱动装置均固定于轴向机构中板和轴向机构后板两个平面之间,轴向驱动装置的输出端与轴向调速装置相连,轴向调速装置的输出端与螺杆相连,连接件的第一连接部套接于螺杆上,第二连接部套接于导轨上,第三连接部套接径向动力装置使得该动力装置获得轴向的驱动力。
所述的轴向驱动装置包括:轴向驱动电机及套在该电机外部的轴向电机套筒。
所述的连接件的第一连接部是与螺杆的螺纹相配合的螺孔结构,第二连接部和第三连接部分分别是与导轨和径向动力装置的外部尺寸相适应的通孔结构。
所述的轴向调速装置为轴向减速齿轮机构,满足轴向伸缩机构在肠道内实际运动时所需驱动力。
所述的轴向机构中板和轴向机构后板之间设有用于固定两者距离的固定挡板。
所述的固定挡板的数量优选为两个。
所述的尾部动力装置设置于轴向伸缩机构的轴向机构中板和轴向机构后板两个平面之间,该动力装置包括:尾部驱动电机。
与现有技术相比,本发明通过控制不同驱动装置来驱动径向机构以及轴向机构的分别运动,由于专门设计了大减速比的调速装置,所以可以使用小型电机进行驱动。本发明体积小、结构简单、控制简单,成本低,性能可靠。本发明能够适应人体胃肠道环境,可以在胃肠道内主动式运行,回避了传统的内窥镜以及胶囊内窥镜的不足之处。
附图说明
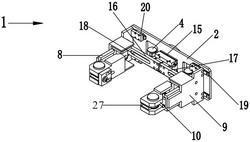
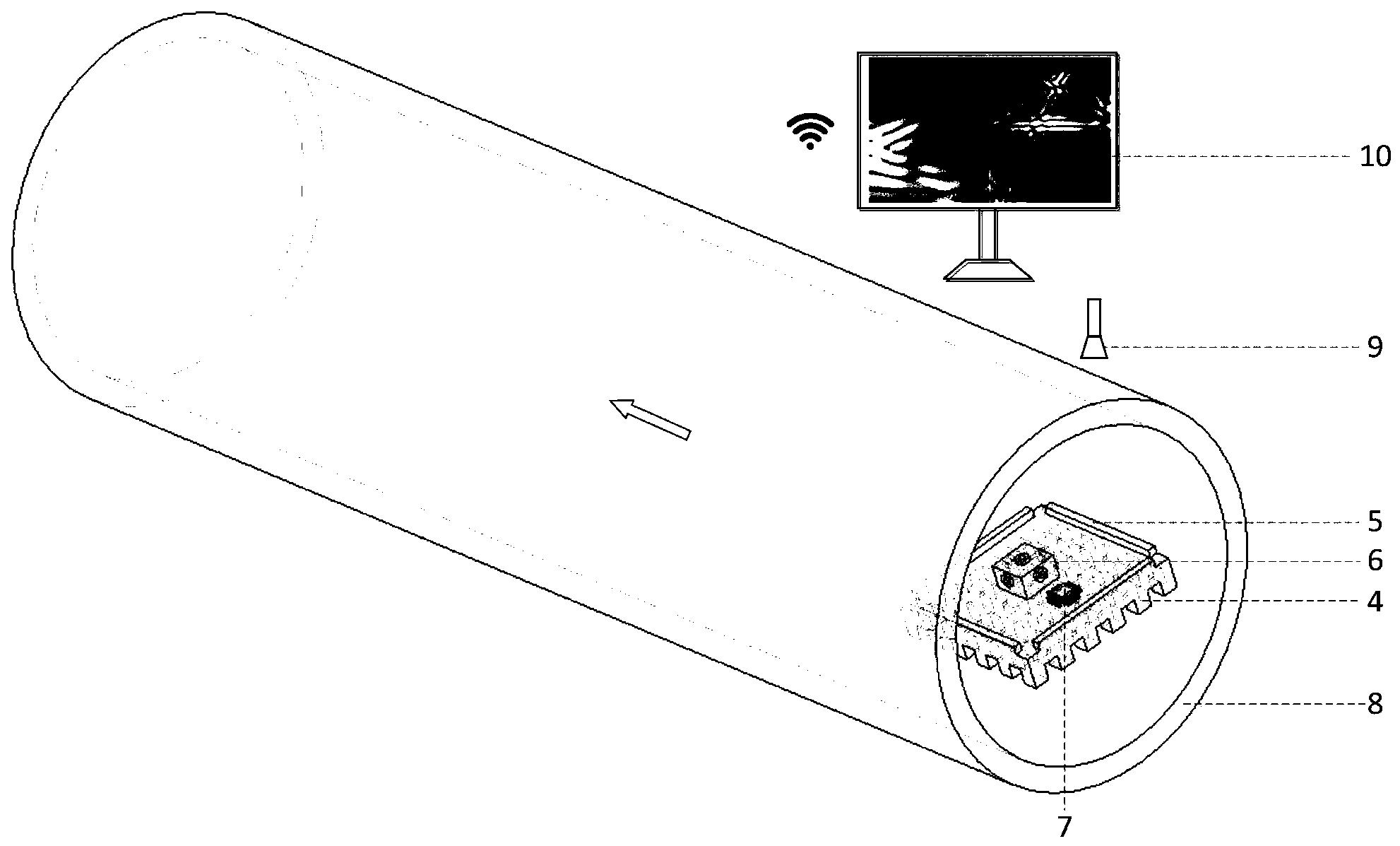
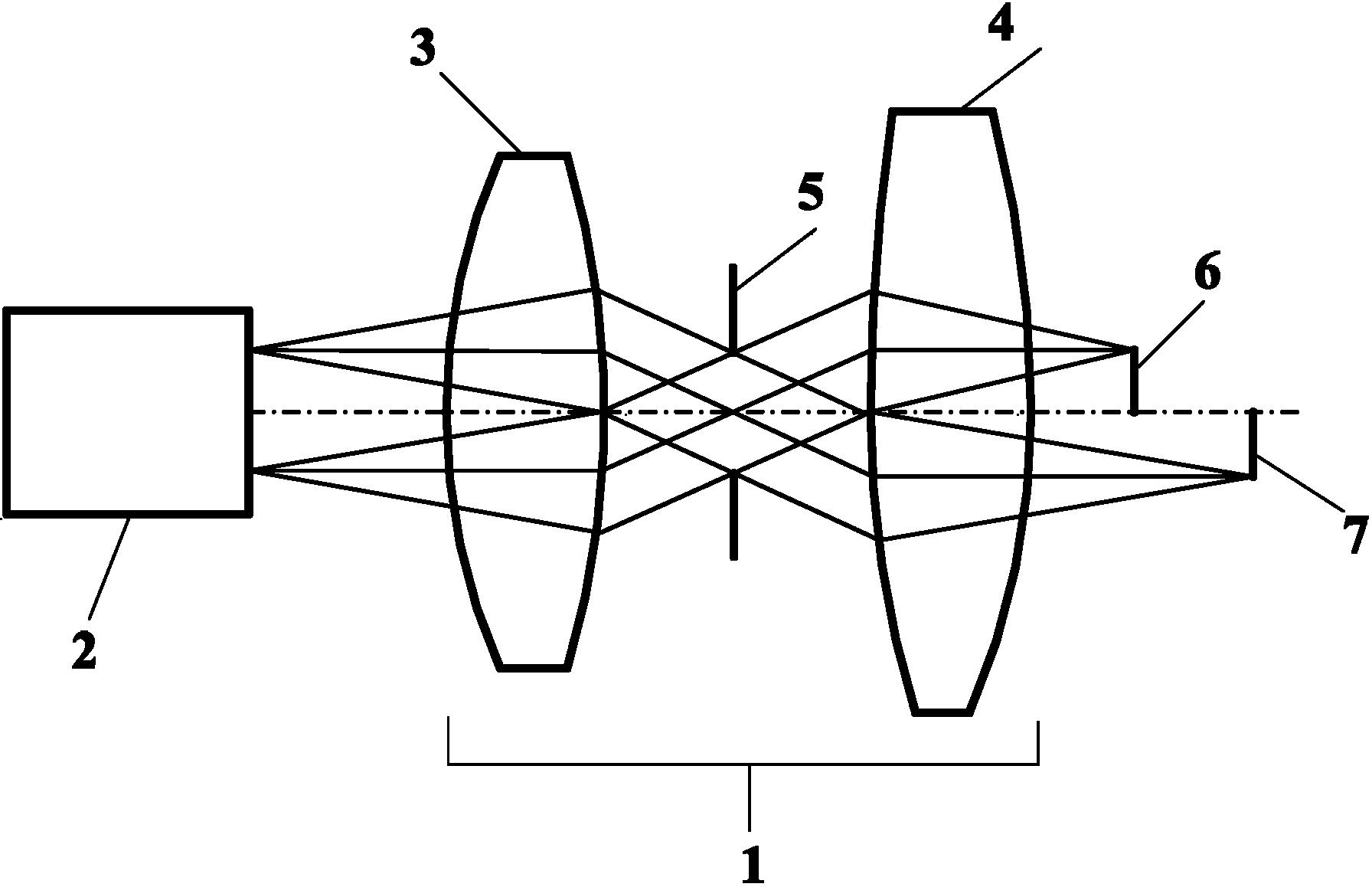
图1为本发明整体结构示意图;
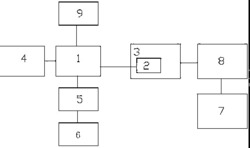
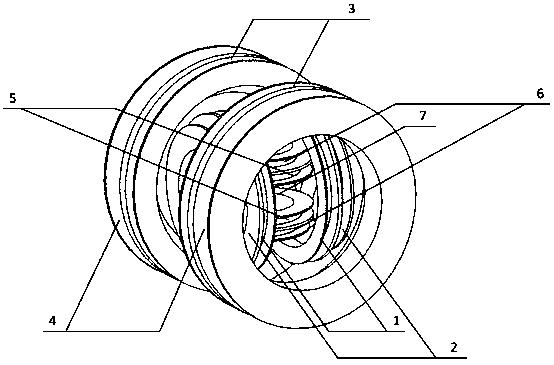
图2为径向钳位机构示意图;
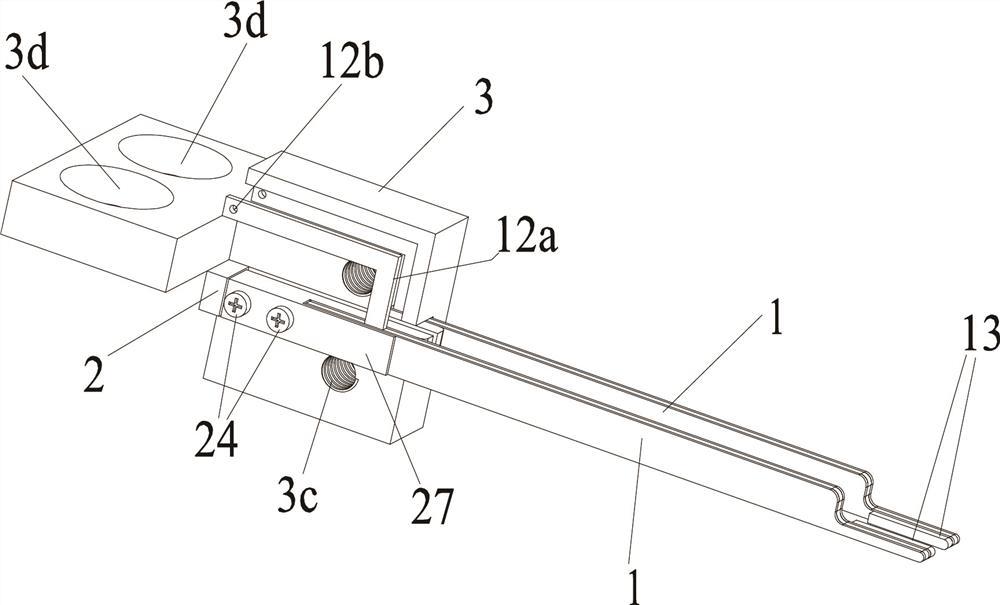
图3为径向钳位机构螺旋线腿结构示意图;
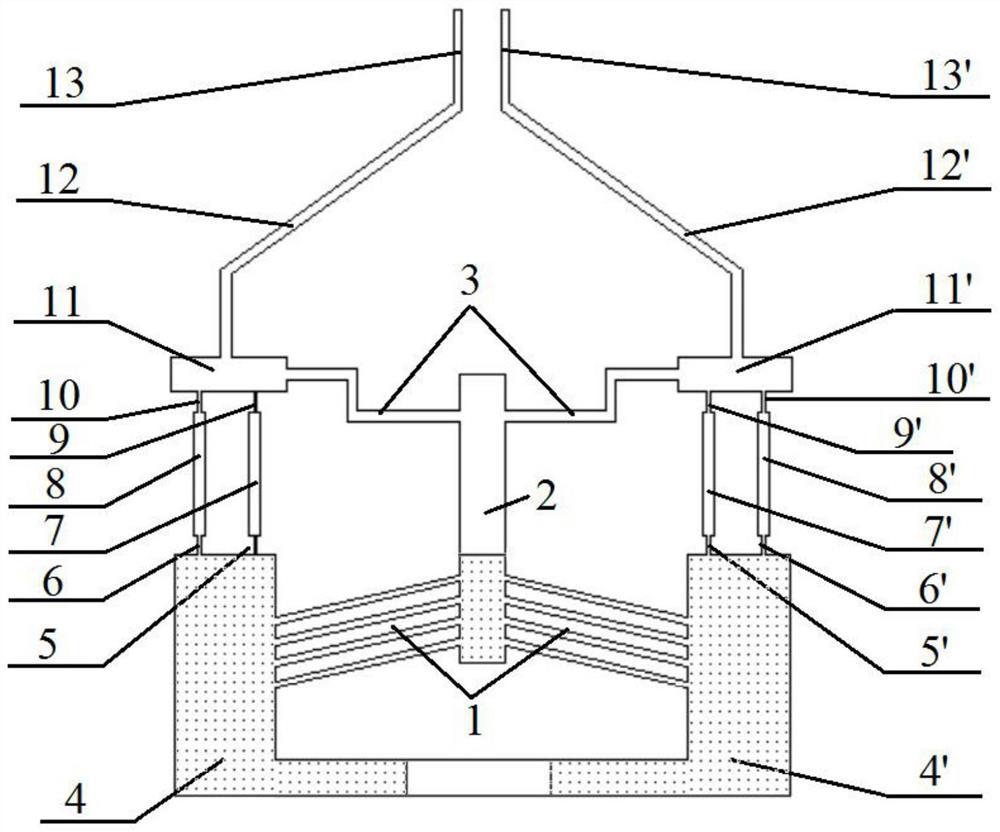
图4为轴向伸缩机构示意图。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例1
如图1所示,本实施例包括:轴向伸缩机构20、头部径向钳位机构19和尾部径向钳位机构21,其中:头部径向钳位机构19由径向动力装置与轴向伸缩机构20相连,尾部径向钳位机构21由尾部动力装置22与轴向伸缩机构20相连。
机器人样机外型尺寸Ф13×32.65mm。机器人样机机械臂展开外径达27.6mm。
如图2、图3所示,径向钳位机构19、尾部径向钳位机构21均包括:相互啮合的机构输出齿轮2和调速输出齿轮3、至少3条均匀分布于机构输出齿轮2外圆周的螺旋线腿4和钳位调速装置6,其中:每条螺旋线腿4的根部有与机构输出齿轮2相啮合的齿轮部,钳位调速装置6的输入端与径向动力装置或尾部动力装置相连以获得驱动力,输出端与调速输出齿轮3相连。
螺旋线腿的根部有齿轮部且与机构输出齿轮相啮合,使得螺旋线腿的总长度增加,可以有效扩张肠道,增大钳位力,使胃肠道机器人在肠道内能有效运动。而基于阿基米德螺旋线设计的腿式结构在旋转打开和关闭过程中具有一定的弹性,有利于应力的均匀分布和释放,防止戳伤肠壁。
所述的螺旋线腿4的前侧设置有钳位机构前板1。
所述的径向动力装置包括:径向驱动电机9及套在该电机外部的径向电机套筒10,其中:径向电机套筒10套与轴向伸缩机构20相连。
径向动力装置输出的动力经调速后传输到机构输出齿轮2带动该齿轮旋转,从而实现各条螺旋线腿4的展开和闭合。
所述的机构输出齿轮2、调速输出齿轮3和各条螺旋线腿4均固定于同一平面。
所述的螺旋线腿4的螺旋曲线为阿基米德曲线。
所述的钳位调速装置6为径向减速齿轮机构,为五级减速,且减速齿轮为环形布置。
所述的钳位调速装置6的前端面设有调速前板5,后端面设有径向机构后板8,侧面设有调速套筒7,其中:调速前板5的另一面固定机构输出齿轮2、调速输出齿轮3和螺旋线腿4。
如图4所示,所述的轴向伸缩机构20包括:轴向调速装置11、轴向机构中板12、螺杆13、连接件14、作为导向件的导轨15、轴向驱动装置16和轴向机构后板18,其中:螺杆13、导轨15和轴向驱动装置16均固定于轴向机构中板12和轴向机构后板18两个平面之间,轴向驱动装置16的输出端与轴向调速装置11相连,轴向调速装置11的输出端与螺杆13相连,连接件14的第一连接部套接于螺杆13上,第二连接部套接于导轨15上,第三连接部套接径向动力装置使得该动力装置获得轴向的驱动力。
所述的尾部动力装置22固定于轴向伸缩机构20的轴向机构中板12和轴向机构后板18两个平面之间,该动力装置包括:尾部驱动电机。
所述的轴向驱动装置16包括:轴向驱动电机及套在该电机外部的轴向电机套筒。
所述的连接件14的第一连接部是与螺杆13的螺纹相配合的螺孔结构,第二连接部和第三连接部分分别是与导轨15和径向动力装置的外部尺寸相适应的通孔结构。
所述的轴向调速装置11为轴向减速齿轮机构,采用环形布置的多级减速器。
所述的轴向机构中板12和轴向机构后板18之间设有用于固定两者距离的固定挡板17。
固定挡板17的数量为两个。
轴向驱动装置16输出通过轴向调速装置11,带动螺杆13转动,进而带动连接件14轴向运动,由于连接件14与径向电机套筒10相固定,从而推动径向钳位机构的轴向伸缩运动。
机器人向前进行一步的完整动作包括六个步骤:头部径向钳位机构19闭合;轴向伸缩机构20伸长;头部径向钳位机构19展开;尾部径向钳位机构21闭合;轴向伸缩机构20缩短;尾部径向钳位机构21展开。
若要向反方向进行,同样需要六个步骤来实现:尾部径向钳位机构21闭合;轴向伸缩机构20伸长;尾部径向钳位机构21展开;头部径向钳位机构19闭合;轴向伸缩机构20缩短;头部径向钳位机构19展开。
头部径向钳位机构19与尾部径向钳位机构21展开,可以使机器人在人体胃肠道内保持位姿。
本装置具体工作时,头部钳位机构19展开:头部钳位机构19驱动电机9正转,经调速机构6减速,从而带动中心齿轮3顺时针运转,螺线腿根部与齿轮3啮合,故螺线腿逆时针展开;头部钳位机构19收缩:头部钳位机构19驱动电机9逆时针转动;尾部钳位机构21展开和收缩过程与头部钳位机构19展开和收缩过程相似。
用于胃肠道的微型机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0