









专利摘要
本发明公开了一种面向微米级软管与微球的装配系统,属于微米级软管及精密装配的自动化装配领域。本发明的微装配系统由夹持与装配对象、辅助运动台、同轴对位检测系统、实时监测系统、微器件夹持系统及正交轴系微球空间定位系统六部分组成。其装配流程为:通过同轴对位检测系统对诊断环进行定位,将软管插入诊断环;对微球进行空间定位,将软管插入到微球的微孔中,并进行点胶;竖直向上拉伸软管与微球,微球固定夹具吸附微球,将其固定在诊断环轴向与径向的中心,实时监测系统监控整个装配过程。本发明具有人机协同、可重配置的特点,为柔性自动化装配扩展了实用空间;还提供了一种高精度的装配方法:具有操作简便、自由度低的优点。
权利要求
1.本发明的一种面向微米级软管与微球的装配系统,其特征在于:包括夹持与装配对象、辅助运动台、同轴对位检测系统、实时监测系统、微器件夹持系统及正交轴系微球空间定位系统六部分;
其中,所述的夹持与装配对象为软管、带微孔的诊断环和微球;
所述的辅助运动台包括Y1直线运动台和Z1直线运动台;
所述的同轴对位检测系统包括手动升降台、Y3直线运动台、CCD相机1、立方体棱镜、棱镜微调整机构;
所述的实时监测系统包括电动升降台、X3直线运动台、相机俯仰调整台、CCD相机2;
所述的微器件夹持系统包括微球固定夹具、诊断环固定夹具、微球吸附夹具、诊断环吸附夹具、软管定位管、微球固定夹具微调整机构、软管运动机构;
所述的正交轴系微球空间定位系统包括正交的α、β夹具旋转轴和正交的X3、Y3直线运动台;
本发明微装配系统的装配流程为:
步骤一、通过同轴对位检测系统对诊断环进行定位,即:使诊断环上的微孔竖直向上;
步骤二、通过同轴对位检测系统,将穿过定位管的软管竖直向下运动,插入诊断环,并将诊断环吸附在诊断环固定夹具上,Z1直线运动台竖直向上运动;
步骤三、采用正交轴系的配置通过同轴对位检测系统对微球进行空间定位;
步骤四、利用同轴对位检测系统将软管插入到微球的微孔中,同时利用实时监测系统监测插入过程,进行点胶;
步骤五、竖直向上拉伸软管与微球,通过实时监测系统将微球固定在诊断环轴向中心,并利用微球固定夹具将其吸附,使其位于诊断环径向的中心;
其中,所述的实时监测系统在装配过程中,通过CCD相机2的上下移动,对夹持与装配对象的动态姿态进行监测。
说明书
技术领域
本发明涉及一种面向微米级软管与微球组件的装配系统,属于微米级软管及精密装配的自动化装配领域。
背景技术
随着微机电系统(Micro-Electro-Mechanical System,MEMS)技术的发展,一些产品的尺寸越来越小且结构复杂,如麦克风、显微光学组件和微流体生物医学设备等。这些产品的许多机械部件尺寸在10微米到几个毫米之间变化,因此迫切需要微小型零件的自动化精密装配技术和系统的建立及发展。
很多MEMS机械部件属于可变形材料,且由于其结构的特殊性,容易变形,如细长型梁状零件。这种柔性对象的自动化装配是实现MEMS完全自动化装配的非常重要且必要的一步。在MEMS零件加工中,经常有这样将柔性材料的零件插入到其他零件的操作,如一些混合MEMS零件的集成,细长的微型机械金属零件插入到深反应离子刻蚀的刻蚀孔中。目前,这样一些装配操作主要由人工配合镊子和显微镜或者高精密抓放机器人执行(如发明名称:基于显微视觉的微装配机器人系统,申请号01133684.6)。一方面,由于这些微小零件的高精度装配要求,手工操作难以达到其要求;另一方面,由于零件材料与结构的特殊性,其刚度小,夹持与定位困难,在批量化生产中,手工操作效率难以保证。
为了克服传统手工操作装配过程的弊端,近年来出现了柔性自动化装配技术。由于柔性自动化装配技术的模块化装配系统的可重配置、自动检测技术、末端柔性卡具等设计,使得其应用及其广泛。
经过文献和专利检索,与微米级微管相关的微装配系统或装置有如下几项:
(1)早在2006年,题目为“Realization of wire-in-hole operation with a two-finger precision manipulator”(作者Zhiqi Liu,Tatsuya Nakamura,发表于Int.J.Adv Manuf Technol,2006,28:1230-1236),该文提出了一种针对灵活组件的机械手微装配系统,该系统采用机械手模拟人工操作,将操纵杆插入孔中,该方法在一定程度上提高了机械化精度,然而由于人工操作环节的存在,精度有待进一步提高。
(2)申请号201210260188.4,发明名称为:适用于微米级微管和微孔的装配点胶装置,公开了一种包括夹持定位系统及显微检测系统的微米级微管和微孔的装配点胶装置,该装置可实现人机协同的微孔零件装配和点胶作业。然而,该发明提出的装配系统,一方面其微孔零件夹持器定位组件的移动平台为手动控制,在一定程度上不可避免的引入空间定位误差;另一方面其显微检测系统包含至少3个显微镜组件,需要多次对焦,从而加大了人机协同控制难度。
(3)申请号201310108701.2,发明名称为:基于单目显微视觉的微管微球对准和装配装置与方法,公开了利用单目显微视觉系统实现了微管与微球对准和装配方法。该发明通过微管的三维运动,保证微管末端图像清晰的同时,有效避免微管多次进出显微视觉系统和多次聚焦,实现了单目显微视觉引导下的微管与微球对准与装配。然而,该发明的运动平台自由度至少三个,如此多的自由度导致运动误差累积与传递,一定程度上无法保证精度的进一步提高。
(4)申请号201310196682.3,发明名称为:微零件装配系统及相应的在线装配方法,公开了一种适用微零件装配的装配系统及相应的在线装配方法。该发明方法基于空间彼此正交排布的三路显微视觉引导,适用于复杂结构零件的空间装配。然而,该系统需要处理大量图像信息,从而系统计算量大、复杂度高,导致装配效率低。
(5)申请号201410081848.1,发明名称为:面向为装配的亚微米精度同轴共焦对准检测方法与装置,公开了一种采用等腰直角三角棱镜的微器件装配系统,实现了亚微米精度的装配对准和精度。该系统虽然精度高,然而成本高达上百万人民币,不容易普及和广泛适用。
与上述专利(3)类似的文献还有如下两篇文献:
1)“微管与微球装配中的姿态检测与姿态对准”(高技术通讯2014年第24卷第4期:401-406),此文提出了一种双目显微视觉系统,实现了姿态测量与对准。然而,该方法中找孔方法的自由度过多,同样有多自由度导致运动误差累积与传递的缺陷。
2)“宏微结合的多机械手微装配机器人系统”(机器人2015年1月第37卷第1期:35-42),此文提出了一套基于显微视觉的多机械手微装配机器人系统,实现了既定装配需求。然而,该机器人系统复杂而精度低,原因在于多机械手臂的自由度数量高,同样会产生因多机械手而引起的运动误差累积与传递的缺陷。
综上所述,虽然目前有许多自动化微装配系统,但大部分都是针对刚度较高的薄壁类、深筒类或平板类零件,很少有目标零件为柔性材料的系统。上述检索到的文献只有(1)文献是针对软管柔性零件的装配。因此,为了实现MEMS零件完全自动化装配,拓宽柔性自动化装配技术的实用范围,必须要在保证装配精度与效率的基础上,解决柔性器件的自动化夹持、检测和装配等问题。
本发明提供的一种面向微米级软管与微球组件的装配系统,目前还未见类似的研究成果。
发明内容
本发明的目的在于进一步提升传统微装配系统的精度,提出一种面向微米级软管与微球的装配系统(后续内容将本发明简称为“微装配系统”)。本发明的微装配系统包括夹持与装配对象、辅助运动台、同轴对位检测系统、实时监测系统、微器件夹持系统及正交轴系微球空间定位系统六部分;
其中,所述的夹持与装配对象为软管、带微孔的诊断环和微球;
所述的辅助运动台包括Y1直线运动台和Z1直线运动台;
所述的同轴对位检测系统包括手动升降台、Y3直线运动台、CCD相机1、立方体棱镜、棱镜微调整机构;
所述的实时监测系统包括电动升降台、X3直线运动台、相机俯仰调整台、CCD相机2;
所述的微器件夹持系统包括微球固定夹具、诊断环固定夹具、微球吸附夹具、诊断环吸附夹具、软管定位管、微球固定夹具微调整机构、软管运动机构;
所述的正交轴系微球空间定位系统包括正交的α、β夹具旋转轴和正交的X2、Y2直线运动台;
本发明微装配系统的装配流程为:
步骤一、通过同轴对位检测系统对诊断环进行定位,即:使诊断环上的微孔竖直向上;
步骤二、通过同轴对位检测系统,将穿过定位管的软管竖直向下运动,插入诊断环,此时的软管与诊断环称为软管与诊断环组件,再将诊断环吸附在诊断环固定夹具上,Z1直线运动台竖直向上运动;
步骤三、采用正交轴系的配置通过同轴对位检测系统对微球进行空间定位;
步骤四、利用同轴对位检测系统将软管插入到微球的微孔中,同时利用实时监测系统监测插入过程,进行点胶;
步骤五、竖直向上拉伸软管与微球,通过实时监测系统将微球固定在诊断环轴向中心,并利用微球固定夹具将其吸附,使其位于诊断环径向的中心;
其中,所述的实时监测系统在装配过程中,通过CCD相机2的上下移动,对夹持与装配对象的动态姿态进行监测。
有益效果
本发明的一种面向微米级软管与微球组件的装配系统为细长型软管类柔性零件插入到微球的装配提供了一种高精度的装配方法,具有如下有益效果:
A)本微装配系统中的夹持与装配对象可以是中间尺度的平板类、薄壁类的微器件,不一定局限于说明书及实施例中所述的微米级软管;
B)本微装配系统具有人机协同、可重配置的特点,为柔性自动化装配大大扩展了其实用范围;
C)本微装配系统具有操作简便、自由度低及可移植的优点。
附图说明
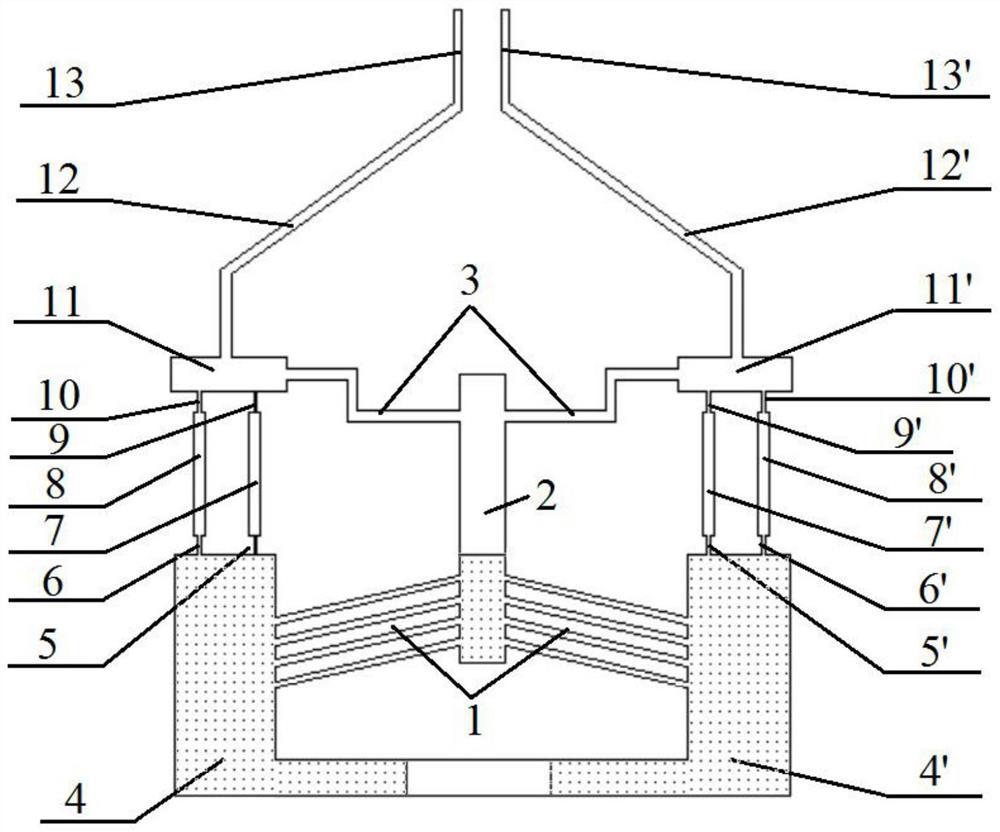
图1为用于细长型软管与微球上微孔的装配系统原理图;
其中,1是Z1直线运动台;2是Y1直线运动台;3是微球吸附夹具;4是α旋转轴;5是诊断环吸附夹具;6是X2直线运动台;7是β旋转轴;8是Y2直线运动台;9是隔振平台;10是CCD相机2;11是相机俯仰调整台;12是X3直线运动台;13是手动升降台;14是电动升降台;15是Y3直线运动台;16是CCD相机1;17是立方体棱镜;18是棱镜微调整机构;19是诊断环固定夹具;20是软管定位管;21是微球固定夹具;22是微球固定夹具微调整机构;23是软管运动机构。软管运动机构包含一个旋转轴和一个定滑轮,该旋转轴在下文中称为γ旋转轴;
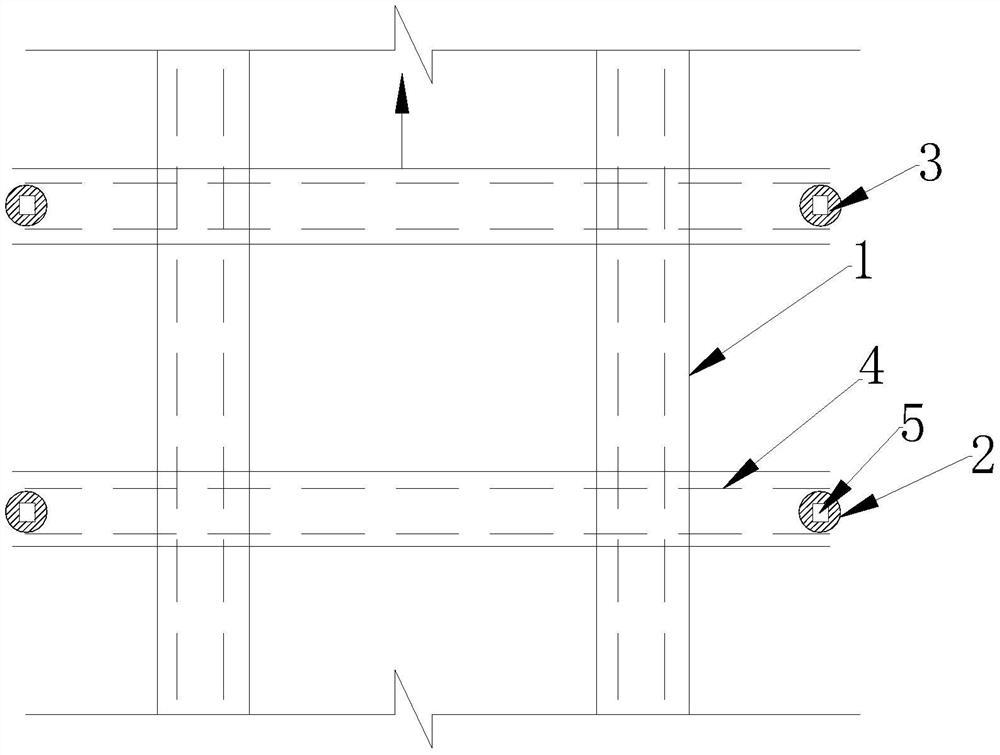
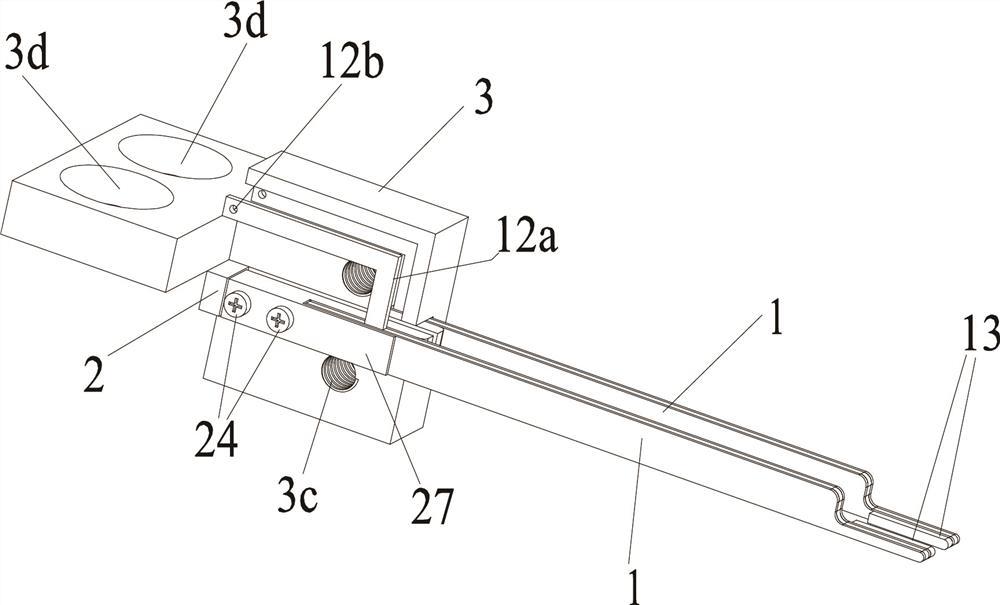
图2为正交轴系微球空间定位原理图;
其中,3是微球吸附夹具;4是α旋转轴;6是X2直线运动台;7是β旋转轴;8是Y2直线运动台;
图3为同轴对位检测原理图;
图4中(a)为实施例的微球和软管组件图,(b)为实施例的诊断环零件图;
其中,24是微球;25是软管;26是诊断环;
图5为本发明实施例中诊断环、软管、微球装配完成的姿态图;
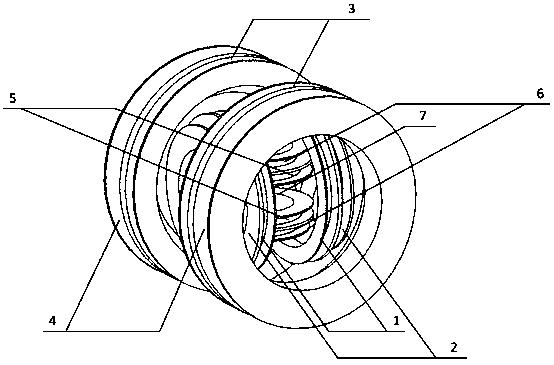
图6为本发明实施例中的微球夹具;
图7为本发明实施例中的诊断环夹具;
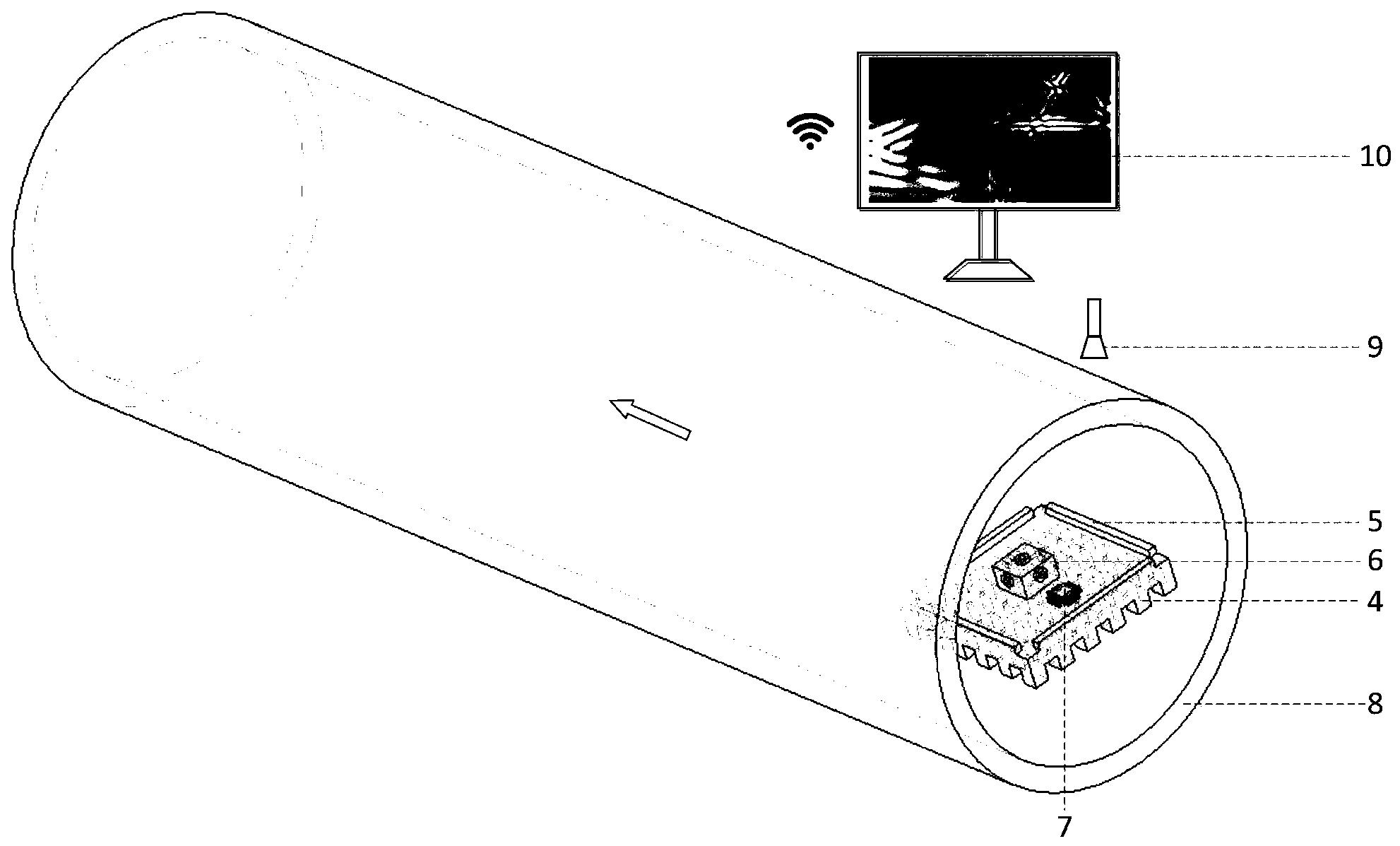
图8为本发明实施例中所提的控制系统原理图。
具体实施方式
本发明的微装配系统结构配置如图1所示,共有两条数据传递链:一是宏动支链,包括宏动的Y1和Z1直线运动台,其行程均为200mm,末端是目标零件(即通过竖直运动进行装配的零件);另一个微动支链,包括微动的X2、Y2直线运动台和α、β旋转轴,行程均为30mm,末端是基体零件(即通过微调整待装配的零件)。
实施例1
本实施例的微装配系统将惯性约束核聚变(Inertial Confinement Fusion,ICF)组件中点火靶装置的微米级软管、诊断环和微球三个零件作为微装配系统中的夹持与装配对象;其中,微米级软管为柔性细长型软管,微球壳体上有微孔,诊断环上有微孔,其尺寸均在微米级,分别与软管配合。
装配精度指标如下表1所示:
表1不同装配对象的装配精度指标要求
图2所示的正交轴系微球空间定位原理,即通过水平面上互相垂直的X2、Y2直线运动台调整α、β旋转轴的进给运动,并通过互相垂直的α、β旋转轴末端的两个微球吸附夹具交替吸附微球并旋转微球,从而对微球进行空间定位。
图3所示的同轴对位检测原理中,目标零件通过目标零件夹持器固定在宏动运动台(即宏动支链中的直线运动台)的末端,基体零件通过基体零件夹持器固定在微动运动台(即为微动支链中的直线运动台与旋转轴)的末端。该立方体棱镜为由两个直角棱镜组成,其中一个直角棱角棱镜的斜面镀有半反半透膜,立方体的四个侧面均为全反射面。上光源与下光源分别用于目标零件与基体零件在同轴对位检测时的照明,使得目标零件与基体零件清晰成像,在同轴对位结束、进行装配之前与立方体棱镜同时撤出。
在本实施例的微装配系统中,目标零件与基体零件以上下的相对位姿进行装配。其对位检测原理如图3所示,立方体棱镜位于目标零件与基体零件的中间,与CCD相机1的距离固定,通过Y3直线运动台的运动调整立方体棱镜的位置以保证其与零件的相对位置,通过棱镜微调整机构调整其空间位姿以保证目标零件与基体零件的图像准确投影。CCD相机1获取到目标零件与基体零件的图像信息,通过图像识别与算法得到二者之间的实际偏差。分别调整目标零件与基体零件的位姿,直至其配合特征重合,撤出立方体棱镜。在本发明的微装配系统中,对位检测系统用于四个过程,第一,诊断环的定位;第二,软管与诊断环的对位装配,目标零件为软管,基体零件为诊断环;第三,微球的空间定位;第四,软管与微球的对位装配,目标零件为软管与诊断环组件,基体零件为已完成空间定位的微球。
实施例2
本实施例的实时监测系统中,X3直线运动台用来调整目标零件、基体零件与CCD相机2的镜头之间的焦距;电动升降台用来控制CCD相机2的高度,通过跟踪零件的位置实时获取零件的图像,从而获得其空间位姿信息;相机俯仰调整台可以调整CCD相机2的镜头角度,以便观测目标零件与基体零件的接触状态。实时监测系统对整个装配过程进行动态的监测,包括软管与诊断环装配时的接触状态、软管与诊断环组件向上运动的夹持状态、微球与软管装配时的接触状态、软管拉伸微球向上运动的过程、以及微球在诊断环径向的定位过程。
实施例3
本实施例针对本发明一种面向微米级软管与微球组件的装配系统中的“微器件夹持系统”展开,本实施例中的微器件夹持系统包括四个真空吸附型夹具,分别为微球固定夹具、诊断环固定夹具、微球吸附夹具、诊断环吸附夹具;一个定位管,即软管定位管;两个微调运动机构,包括微球固定夹具微调整机构和软管运动机构。微器件夹持系统用于实施例中软管、诊断环和微球三个零件的夹持与定位。其中,微球固定夹具(如图6所示)、诊断环固定夹具(如图7所示)分别用于微球和诊断环在Z1直线台上的夹持与定位,微球吸附夹具、诊断环吸附夹具分别用于微球和诊断环在X2、Y2直线台上的进行空间定位时的夹持,软管定位管用于固定柔性零件软管的方向,微球固定夹具微调整机构用于调整微球固定夹具在诊断环内的轴向位置,从而固定微球在诊断环内的轴向与径向位置,软管运动机构用于拉伸软管,带动微球上下运动从而控制其在诊断环内的径向位置。四个吸附型夹具均具有尺寸小、结构复杂的特点,本实施例中均采用电磁阀来控制四个真空吸附型夹具的气路。
实施例4
本实施例中的正交轴系微球空间定位系统中,α、β旋转轴上分别装有微球吸附夹具。首先,通过旋转α轴寻找微球上微孔,同时利用对位检测系统采集到的图像信息判断其位姿,完成微球在α轴的粗定位;其次,控制X2、Y2直线台的运动,将微球吸附到β轴上并旋转找孔,完成微球在β轴的定位;最后,再次将微球吸附α轴上,完成微球在α轴的定位。旋转微球,直至观察到微球上微孔竖直向上,即为完成微球的空间定位。除此之外,与微球的空间定位方法类似,利用α轴的旋转完成诊断环的空间定位。
实施例5
本实施例提出了基于本发明的控制系统方案如图8所示,采用“PC+运动控制器+图像采集卡+数据采集卡”的开放式总体构架,形成以PC机,即工业控制计算机为上位机,运动控制器、图像采集卡和数据采集卡为下位机的分布控制。
其中,宏动模块的两自由度位移台包括实施例中的Y1、Z1直线运动台,即辅助运动台;微动模块的两自由度微动台包括实施例中的X2、Y2直线运动台、两自由度旋转轴包括实施例中的α、β旋转轴,即正交轴系微球空间定位系统的运动台;视觉反馈模块的角位移台包括实施例中的相机俯仰调整台,两自由度进给台包括实施例中的X3、Y3直线运动台,光学镜头包括实施例中的CCD相机1、CCD相机2的镜头,即同轴对位检测系统与实时监测系统的运动台与两个CCD相机;夹持模块的吸附夹具包括实施例中的微球固定夹具、诊断环固定夹具、微球吸附夹具、诊断环吸附夹具,即微器件夹持系统的微器件的四个真空吸附型夹具,均通过电磁阀来控制其吸附气路的开关;辅助模块的光源包括实施例中的上光源、下光源,即同轴对位检测系统的光源(如图3所示),通过光源驱动器控制光源的亮度及状态。
运动控制器采用PMAC(Program Multiple Axises Controller)多轴运动控制卡对微装配系统中的Y1、Z1、X2、Y2、X3、Y3六个直线运动台,α、β、γ三个旋转轴和相机俯仰调整台进行控制,采用图像采集卡对CCD相机1和CCD相机2的图像信息进行采集,采用数据采集卡对夹持模块的电磁阀和辅助模块的光源驱动器信息进行采集。控制系统包含十套驱动系统,分别用于本发明所提系统中Y1、Z1、X2、Y2、X3、Y3六个直线运动台,α、β、γ三个旋转轴,相机俯仰调整台的驱动。运动控制器通过PC机得到图像采集卡的图像反馈信息,分别通过十个电机驱动器产生对各运动台、旋转轴和相机俯仰调整台的电机的驱动信号,电机驱动器接到信号后调节流量的大小,通过流量的微量变动来达到六个直线运动台、三个旋转轴和相机俯仰调整台发生微位移从而调整的目的。PC机包含电源驱动器、面板键盘、存储器和显示器等组成部分。
以上所述为本发明的较佳实施例而已,本发明不应该局限于该实施例和附图所公开的内容。凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
一种面向微米级软管与微球组件的装配系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0