










专利摘要
本发明公开了一种多纤毛磁力微机器人及其制造方法与控制系统,所述多纤毛磁力微机器人包括微机器人基体及位于微机器人基底上的磁力驱动模块,所述微机器人基体包括主体部及位于主体部两侧对称设置的若干纤毛结构,所述主体部包括第一端及第二端,主体部的宽度自第一端至第二端逐渐减小。本发明基于摆动磁场驱动,模仿自然界中真核细胞生物体测的纤毛运动,依靠人造的侧边多纤毛驱动其运动,以更大效率在微全分析系统中进行工作。
权利要求
1.一种多纤毛磁力微机器人,其特征在于,所述多纤毛磁力微机器人包括微机器人基体及位于微机器人基底上的磁力驱动模块,所述微机器人基体包括主体部及位于主体部两侧对称设置的若干纤毛结构,所述主体部包括第一端及第二端,主体部的宽度自第一端至第二端逐渐减小。
2.根据权利要求1所述的多纤毛磁力微机器人,其特征在于,所述磁力驱动模块为软磁材料层。
3.根据权利要求2所述的多纤毛磁力微机器人,其特征在于,所述磁力驱动模块为椭圆状的镍层,磁力驱动模块远离主体部的第二端设置。
4.根据权利要求1所述的多纤毛磁力微机器人,其特征在于,所述纤毛结构自主体部向外偏向于第二端一侧延伸设置,纤毛结构的长度自第一端向第二端方向逐渐减小。
5.根据权利要求4所述的多纤毛磁力微机器人,其特征在于,所述纤毛结构包括位于第一端一侧的第一边及位于第二端一侧的第二边,第一边及第二边均为圆弧形设置,且同一个纤毛结构中第一边的圆弧半径小于第二边的圆弧半径。
6.根据权利要求5所述的多纤毛磁力微机器人,其特征在于,不同的所述纤毛结构中第一边的圆弧半径自第一端向第二端方向逐渐减小,不同的所述纤毛结构中第二边的圆弧半径自第一端向第二端方向逐渐减小。
7.一种权利要求1~6中任一项所述的多纤毛磁力微机器人的制造方法,其特征在于,所述制造方法包括以下步骤:
S1、利用旋涂工艺在衬底上覆盖一层光刻胶;
S2、利用掩模版并通过紫外线照射将与微机器人基底对应的图形转移到光刻胶上;
S3、利用显影液溶解掉多余的光刻胶并进行烘烤工艺,在衬底上形成微机器人基底;
S4、运用电子束蒸发工艺将磁力驱动模块施加在微机器人基底上;
S5、去除衬底,得到多纤毛磁力微机器人。
8.根据权利要求7所述的制造方法,其特征在于,所述制造方法中,衬底为硅衬底,光刻胶为SU-8,磁力驱动模块为镍层,“去除衬底”具体为:将整个衬底浸没在温度为85℃的5%的四甲基氢氧化铵水溶液中进行衬底去除。
9.一种权利要求1~6中任一项所述的多纤毛磁力微机器人的控制系统,其特征在于,所述控制系统包括:
磁力平台,用于为多纤毛磁力微机器人提供摆动磁场;
微全分析系统,位于磁力平台的工作平台上,用于对多纤毛磁力微机器人进行微全分析;
图像获取模块,与微全分析系统相连,用于记录多纤毛磁力微机器人的运动时序图;
远程控制模块,与图像获取模块相连,用于远程控制多纤毛磁力微机器人的运动;
驱动电源,与磁力平台和远程控制模块相连,用于为磁力平台提供电源。
10.根据权利要求9所述的控制系统,其特征在于,所述磁力平台包括若干Helmholt线圈及位于Helmholt线圈中间的工作平台,所述Helmholt线圈包括处于第一方向且相互平行的两个第一Helmholt线圈、以及位于两个第一Helmholt线圈之间且处于第二方向的第二Helmholt线圈,所述第一方向的第一Helmholt线圈与第二方向的第二Helmholt线圈垂直设置。
说明书
技术领域
本发明涉及微机器人及医学治疗技术领域,特别是涉及一种多纤毛磁力微机器人及其制造方法与控制系统。
背景技术
400年前,从第一台光学显微镜被发明并登上历史舞台开始,人们开始意识到自然界中上存在着大量多种多样的微小但复杂精巧的生物体,它们能够自由移动,并能够感知周围环境甚至具备一定的智能。至此,神奇的微观世界的大门开始打开。微观世界至此独立于宏观世界,与之相关的学术课题慢慢成为学术界的研究热点。在某部科幻电影中,一群科学家利用神奇的缩小射线将载人潜水艇缩小至微尺寸大小,成功进入了一位身患重病的患者的血液中,并挽救他的生命。尽管此为科幻电影中的情节,且诸如神奇的缩小射线技术和奇妙的人体内一日游这样的场景显得十分不实际甚至是天方夜谭,但却展示出了一个利用微型机器人进行无创医学治疗的景象。确实,微机器人凭借其自身微小的尺寸和自由、无约束、可控等特点,十分适合在封闭狭小的体内环境下运动并进行各种功能应用,例如在人体血管内进行靶向载药、微创/无创诊断和手术等应用,能够大大减少病人受到的伤害和折磨。除此之外,近年来在生物工程领域,芯片实验室(微全分析系统)成为热门,微机器人凭借自身的优点,能够在芯片实验室内部通道中自由移动,实现样品、试剂的采集和运输、分离和检测、以及微型零部件的装配等操作。
现如今,磁力微机器人凭借巨大的潜力正吸引越来越多的学者们投身到对其的研究当中,许多优秀的研究成果被呈现,磁力微机器人具有无限的潜能和巨大的应用前景。依靠匀强磁场驱动方式又可以分为基于转动匀强磁场的驱动方式和基于摆动匀强磁场的驱动方式,前者展现了优秀的运动学性能,但微机器人的制造难度大;而后者制造方便,可实现大批量生产,但目前其运动性能表现欠佳。如Khalil等人于2014年提出的“磁力精子”微机器人,借助尾部的扩散波变形模仿了精子细胞在液体环境中的运动方式,磁力精子依靠外磁场带动机器人头部磁力模块的摆动再带动机器人尾部摆动,驱动自身向前运动。由于采用了成熟的微制造工艺技术,该微机器人的制造过程简单,易完成批量生产,成本低廉。其整体长度尺寸仅为322微米长,且可以进一步缩小,但其最优速度仅可达到158μm/s,约为1/2体长每秒,受到其结构以及运动方式设计的限制,具有尾部柔性不足、运动表现欠缺的缺点。
因此,针对上述技术问题,有必要提供一种多纤毛磁力微机器人及其制造方法与控制系统。
发明内容
有鉴于此,本发明的目的在于提供一种多纤毛磁力微机器人及其制造方法与控制系统,以克服现有技术中磁力微机器人尾部柔性不足、运动表现欠缺的不足。
为了实现上述目的,本发明实施例提供的技术方案如下:
一种多纤毛磁力微机器人,所述多纤毛磁力微机器人包括微机器人基体及位于微机器人基底上的磁力驱动模块,所述微机器人基体包括主体部及位于主体部两侧对称设置的若干纤毛结构,所述主体部包括第一端及第二端,主体部的宽度自第一端至第二端逐渐减小。
作为本发明的进一步改进,所述磁力驱动模块为软磁材料层。
作为本发明的进一步改进,所述磁力驱动模块为椭圆状的镍层,磁力驱动模块远离主体部的第二端设置。
作为本发明的进一步改进,所述纤毛结构自主体部向外偏向于第二端一侧延伸设置,纤毛结构的长度自第一端向第二端方向逐渐减小。
作为本发明的进一步改进,所述纤毛结构包括位于第一端一侧的第一边及位于第二端一侧的第二边,第一边及第二边均为圆弧形设置,且同一个纤毛结构中第一边的圆弧半径小于第二边的圆弧半径。
作为本发明的进一步改进,不同的所述纤毛结构中第一边的圆弧半径自第一端向第二端方向逐渐减小,不同的所述纤毛结构中第二边的圆弧半径自第一端向第二端方向逐渐减小。
相应地,一种多纤毛磁力微机器人的制造方法,所述制造方法包括以下步骤:
S1、利用旋涂工艺在衬底上覆盖一层光刻胶;
S2、利用掩模版并通过紫外线照射将与微机器人基底对应的图形转移到光刻胶上;
S3、利用显影液溶解掉多余的光刻胶并进行烘烤工艺,在衬底上形成微机器人基底;
S4、运用电子束蒸发工艺将磁力驱动模块施加在微机器人基底上;
S5、去除衬底,得到多纤毛磁力微机器人。
作为本发明的进一步改进,所述制造方法中,衬底为硅衬底,光刻胶为SU-8,磁力驱动模块为镍层,“去除衬底”具体为:将整个衬底浸没在温度为85℃的5%的四甲基氢氧化铵水溶液中进行衬底去除。
相应地,一种多纤毛磁力微机器人的控制系统,所述控制系统包括:
磁力平台,用于为多纤毛磁力微机器人提供摆动磁场;
微全分析系统,位于磁力平台的工作平台上,用于对多纤毛磁力微机器人进行微全分析;
图像获取模块,与微全分析系统相连,用于记录多纤毛磁力微机器人的运动时序图;
远程控制模块,与图像获取模块相连,用于远程控制多纤毛磁力微机器人的运动;
驱动电源,与磁力平台和远程控制模块相连,用于为磁力平台提供电源。
作为本发明的进一步改进,所述磁力平台包括若干Helmholt线圈及位于Helmholt线圈中间的工作平台,所述Helmholt线圈包括处于第一方向且相互平行的两个第一Helmholt线圈、以及位于两个第一Helmholt线圈之间且处于第二方向的第二Helmholt线圈,所述第一方向的第一Helmholt线圈与第二方向的第二Helmholt线圈垂直设置。
本发明的有益效果是:
多纤毛磁力微机器人基于摆动磁场驱动,模仿自然界中真核细胞生物体测的纤毛运动,依靠人造的侧边多纤毛驱动其运动,以更大效率在微全分析系统中进行工作;
采用软磁材料的磁力驱动模块依附在微机器人的基体上,尾部的柔性可以使微机器人更灵活运动,速度可以达到自身长度;
多纤毛磁力微机器人通过微制造工艺获得,采用原材料沉积、图形转移、蚀刻三步进行,制造工艺简单;
对控制系统的驱动电源进行二次开发,进一步对电源信号各参数的控制及驱动信号进行了优化,整个控制系统结构简单,控制方便。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明一具体实施方式中多纤毛磁力微机器人的结构示意图;
图2为本发明一具体实施方式中多纤毛磁力微机器人的制造方法流程图;
图3为本发明一具体实施方式中多纤毛磁力微机器人的制造工艺流程图;
图4为本发明一具体实施方式中多纤毛磁力微机器人控制系统的模块示意图;
图5为本发明一具体实施方式中磁力平台的结构示意图;
图6为本发明一具体实施方式中磁力平台摆动磁场的示意图;
图7为本发明一具体实施方式中多纤毛磁力微机器人的运动时序图;
图8为本发明一具体实施方式中不同摆动角下的磁力微机器人的运动速度折线图;
图9为本发明一具体实施方式中不同磁场强度下的磁力微机器人的运动速度折线图。
具体实施方式
为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
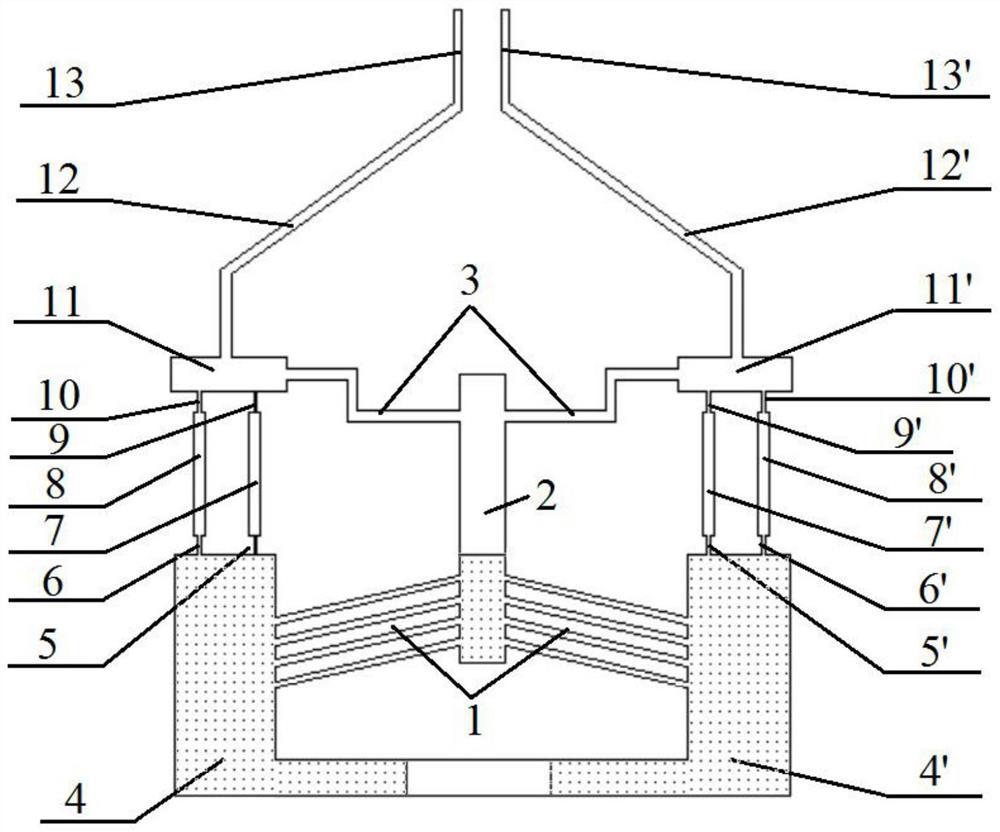
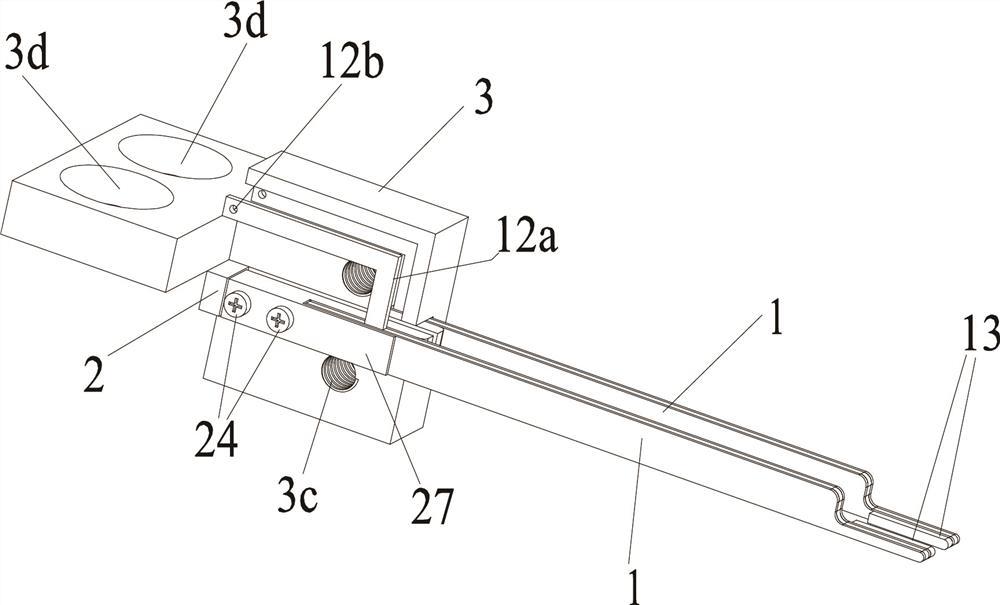
参图1所示,本发明一具体实施方式中的一种多纤毛磁力微机器人10,包括微机器人基体11及位于微机器人基底上的磁力驱动模块12,微机器人基体11包括主体部111及位于主体部两侧对称设置的若干纤毛结构112,主体部111包括第一端1101及第二端1102,第一端1101和第二端1102的外侧均呈半圆形设置,主体部111的宽度自第一端1101至第二端1102逐渐减小。
其中,本发明中的磁力驱动模块12为软磁材料层,优选地,本实施方式中磁力驱动模块12为椭圆状的镍层,磁力驱动模块12远离主体部111的第二端1102设置,椭圆形镍层的长轴与主体部的对称轴同轴设置。
本发明中纤毛结构112自主体部11向外偏向于第二端1102一侧延伸设置,纤毛结构112的长度自第一端1101向第二端方向1102逐渐减小。
进一步地,纤毛结构112包括位于第一端一侧的第一边1121及位于第二端一侧的第二边1122,第一边1121及第二边1122均为圆弧形设置,且同一个纤毛结构中第一边1121的圆弧半径小于第二边1122的圆弧半径,不同的纤毛结构中第一边1121的圆弧半径自第一端向第二端方向逐渐减小,不同的纤毛结构中第二边1122的圆弧半径自第一端向第二端方向逐渐减小。
本发明一具体实施方式中,多纤毛磁力微机器人10中微机器人基体11的长度、宽度和高度分别为450μm、320μm和40μm,磁力驱动模块12为椭圆状薄镍片,磁力驱动模块的长轴、短轴及厚度分别为220μm、90μm和1μm。
进一步地,主体部111第一端1101为半径75μm的半圆形,第二端1102为半径25μm的半圆形,主体部111的两侧对称设有三对纤毛结构112。
其中,从第一端1101向第二端1102方向,第一对纤毛结构的第一边及第二边分别为半径225μm和310μm的圆弧,第二对纤毛结构的第一边及第二边分别为半径160μm和235μm的圆弧,第三对纤毛结构的第一边及第二边分别为半径110μm和180μm的圆弧。
应当理解的是,上述实施方式仅为本发明中的一优选实施方式,在其他实施例中,纤毛结构的数量及尺寸、微机器人基体的尺寸、磁力驱动模块等均不限于上述实施方式,此处不再一一举例进行详细说明。
本发明中的多纤毛磁力微机器人的制造利用微制造工艺,通过原材料沉积、图形转移、蚀刻三步进行微制造工艺获得。参图2所示,具体制造方法包括以下步骤:
S1、利用旋涂工艺在衬底上覆盖一层光刻胶;
S2、利用掩模版并通过紫外线照射将与微机器人基底对应的图形转移到光刻胶上;
S3、利用显影液溶解掉多余的光刻胶并进行烘烤工艺,在衬底上形成微机器人基底;
S4、运用电子束蒸发工艺将磁力驱动模块施加在微机器人基底上;
S5、去除衬底,得到多纤毛磁力微机器人。
以下结构图3所示,对本发明一具体实施方式中多纤毛磁力微机器人的制造方法作详细说明。
参图3a所示,利用旋涂工艺在硅衬底上覆盖一层40μm厚的光刻胶(SU-8);然后利用掩模版并通过紫外线照射将特定图形转移到光刻胶上,参图3b所示;接着利用显影液溶解掉多余的光刻胶并进行烘烤工艺步骤,得到图3c所示的结构,为下一步工艺做好准备;随后运用电子束蒸发工艺将1μm厚的镍层施加在光刻胶基体上,参图3d所示;最后将整个硅衬底浸没在温度为85℃的5%的四甲基氢氧化铵水溶液中,去除硅衬底得到图3e所示的多纤毛磁力微机器人。
参图4所示,本发明还公开了一种多纤毛磁力微机器人的控制系统100,该控制系统100包括:
磁力平台20,用于为多纤毛磁力微机器人提供摆动磁场;
微全分析系统30,位于磁力平台的工作平台上,用于对多纤毛磁力微机器人进行微全分析;
图像获取模块40,与微全分析系统相连,用于记录多纤毛磁力微机器人的运动时序图;
远程控制模块50,与图像获取模块相连,用于远程控制多纤毛磁力微机器人的运动;
驱动电源60,与磁力平台和远程控制模块相连,用于为磁力平台提供电源。
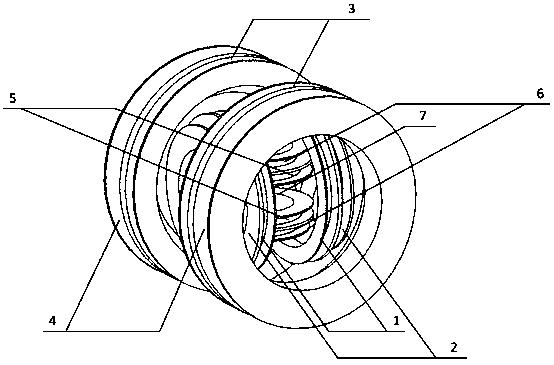
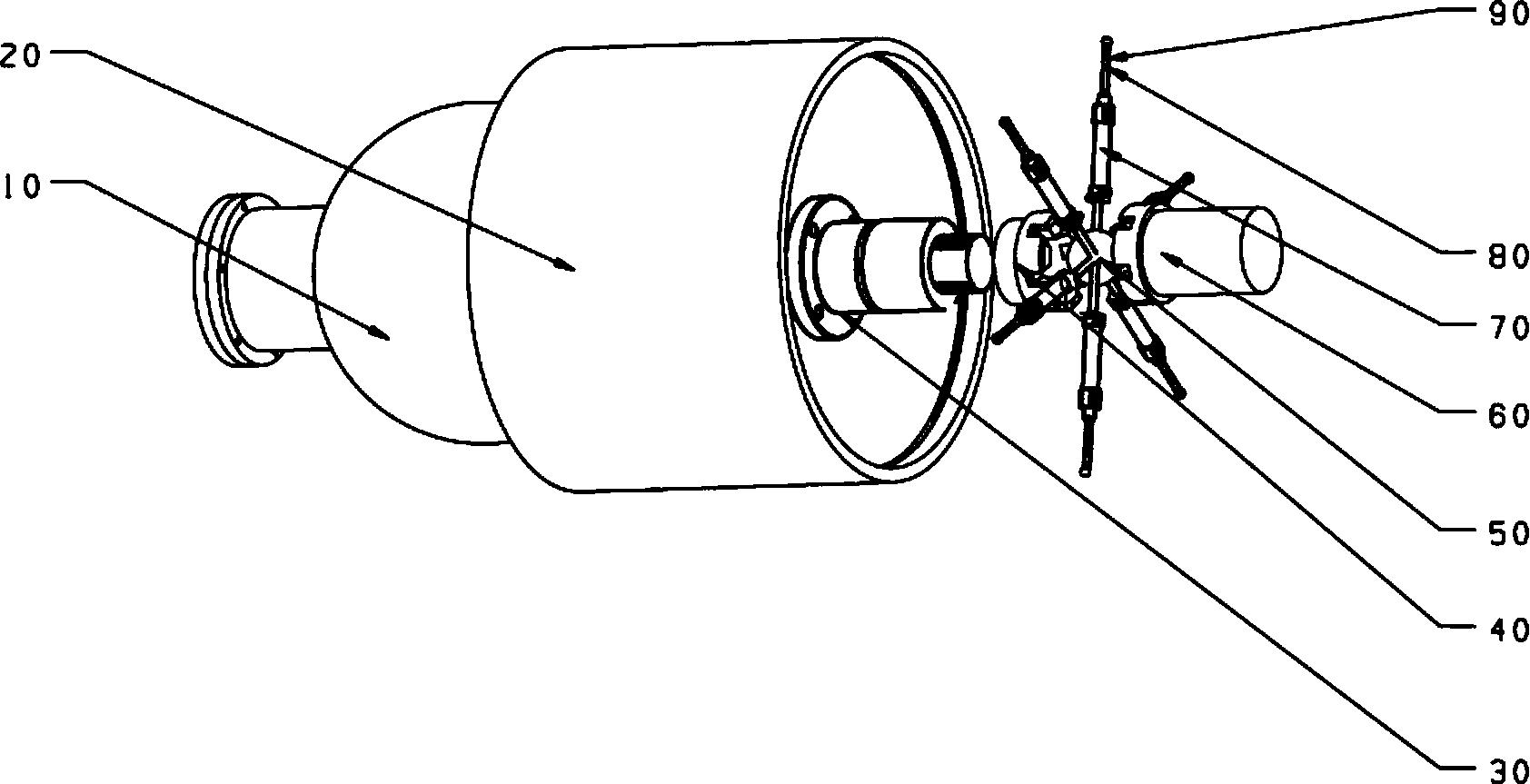
参图5所示,磁力平台20包括若干Helmholt线圈及位于Helmholt线圈中间的工作平台23,Helmholt线圈包括处于第一方向(X方向)且相互平行的两个第一Helmholt线圈21、以及位于两个第一Helmholt线圈之间且处于第二方向(Y方向)的第二Helmholt线圈22,第一Helmholt线圈与第二Helmholt线圈22垂直设置,Helmholt线圈的参数参表1所示。
表1 Helmholt线圈主要参数
优选地,本发明一实施方式中磁力平台20产生的连续摆动磁场模型如图6所示,在二维平面坐标系中,摆动基线与X轴正方向之间的夹角θb为摆动磁场矢量的基角,规定了摆动磁场的方向;摆动边界与摆动基线之间的夹角θp为磁场矢量的摆动角,即为磁场的摆动幅度;而θ为瞬时磁场矢量的方向角,其大小与基角θb以及摆动角θp的大小有关。利用三角函数的变化特性,瞬时磁场矢量的方向角θ与时间t的关系函数可以表示为:
θ(t)=θb+θpsin(ωt) (1)
再在X、Y方向Helmholtz线圈中分别通入相位差为90°的该角的正弦和余弦函数的电流激励信号Ix、Iy,便可以得到连续摆动的磁场矢量。Ix、Iy分别为:
Ix(t)=αxcos(θb+θpsin(ωt)) (2)
Iy(t)=αysin(θb+θpsin(ωt)) (3)
其中ω为角频率,用于决定驱动磁场的摆动频率;而αx和αy与X和Y方向的电磁线圈的电磁特性系数δx、δy有关,用以消除了两个方向电磁线圈因参数不同而带来的差异性,其大小决定了摆动磁场的强度。在该电流模型中,通过改变基角θb可以控制微机器人的运动方向,而改变θp可以调节磁力微机器人的摆动角,对这几个参数加以控制,可以进一步控制目标磁力机器人二维的运动。
选用了程控交/直流电源(型号:GW-APS-1102A),该电源可输出连续变化的驱动电流信号,并能够自定义电源信号波形,为可编程控制仪器,输出功率为195W,输出信号频率为1-550Hz,功率与频率均足够对磁力微机器人进行完整的运动学实验。选择的驱动电源为单通道设备,因此要完成两个方向的Helmholtz线圈的电流激励信号的施加,需要两台这样设备才能实现。同时为了满足连续摆动磁场的产生要求,需要两台驱动电源同步工作,利用实验人员的手动操作显然不能满足要求。为此,利用NI的Labview软件编写的控制程序模块,两台设备的同步工作通过控制程序中的串口通信模块实现,向两台设备同时发送“开/关”指令来同步控制电源的开/关,控制模块同时结合了电子放大镜的图像获取模块。
多纤毛磁力微机器人在微全分析系统30中进行工作,微全分析系统在磁力平台20的工作平台23上,在微全分析系统的一侧安置具体图像获取模块40的电子放大镜与远程控制模块50相连,磁力平台的另一端是由导线跟驱动电源60相连,驱动电源50用串口与远程控制模块50同时相连。
本发明的工作原理是:借鉴了自然界中真核细胞生物体侧的纤毛运动,依靠摆动的匀强外磁场驱动微机器人同频摆动,再带动侧边伸出的多对人造纤毛,为磁力微机器人提供向前的推力。由于体侧纤毛的弯曲形状,致使自身来回往复的摆动拥有了向前的趋向性,而非单纯的来回往复运动。在低雷诺数液体环境下,侧边多纤毛的作用不像是浆片,更像是雪地靴上的脚钉。利用这一原理,驱动多纤毛磁力机器人向前运动。采用驱动电源(电源型号为GW-APS-1102A)的程控交/直流电源,可通过远程控制其输出电流的大小,从而使磁力平台中的线圈产生的摆动磁场,X、Y方向Helmholtz线圈共同作用下产生两个边界的磁场矢量,当两个磁场矢量规律地交替出现的时候,就产生了一个简单的摆动匀强磁场,具体的实现方法为利用NI的Labview软件编写,而多纤毛磁力微机器人由于其是柔性磁体,在磁场的作用下开始运动,图像获取模块中的电子放大镜会可以记录微机器人的运动时序图。
具体地,本发明一具体实施方式中利用控制系统对多纤毛磁力微机器人进行了驱动实验,实验在30°摆动角,摆动频率为15Hz,强度约为5mT的驱动磁场下进行,图7展示了多纤毛磁力微机器人的运动时序图。
由图像结果可以看出,设计的多纤毛磁力微机器人成功被摆动磁场驱动。进一步施加多种摆动角,不同频率的驱动磁场,记录并研究多纤毛磁力微机器人的运动学表现。实验中,驱动磁场强度约为5mT,分别对30°、45°和55°的摆动角下,不同的摆动频率(0-60Hz)下的磁力微机器人的运动进行观察并记录结果,结果如图8所示。
观察实验结果发现,随着摆动频率的上升,磁力微机器人的运动速度也会随之加快,综合看来,在45°摆动角下,微机器人有着最佳的运动表现,在35Hz的摆动磁场下,速度达到了380μm/s。进一步观察发现,在三个不同的摆动角下,微机器人的速度均会在摆动平率达到某一值时突然下降。
对多纤毛磁力微机器人进一步施加了45°摆动角下的强度约为10mT的外驱动磁场,微机器人的运动结果如图9。在施加了更大强度的驱动磁场后,且最大速度达到了400μm/s,相比同样依靠摆动磁场的微机器人,其运动速度有所提升。
由以上技术方案可以看出,本发明具有以下有益效果:
多纤毛磁力微机器人基于摆动磁场驱动,模仿自然界中真核细胞生物体测的纤毛运动,依靠人造的侧边多纤毛驱动其运动,以更大效率在微全分析系统中进行工作;
采用软磁材料的磁力驱动模块依附在微机器人的基体上,尾部的柔性可以使微机器人更灵活运动,速度可以达到自身长度;
多纤毛磁力微机器人通过微制造工艺获得,采用原材料沉积、图形转移、蚀刻三步进行,制造工艺简单;
对控制系统的驱动电源进行二次开发,进一步对电源信号各参数的控制及驱动信号进行了优化,整个控制系统结构简单,控制方便。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
多纤毛磁力微机器人及其制造方法与控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0