








专利摘要
本发明公开了一种行走及弹跳机器人,用于实现弹跳和行走功能。它包括固定部分、行走及弹跳执行部分、蓄能部分和弹跳触发部分,行走及弹跳执行部分包括底板、第一、第二、第三拉杆和第一滑块,底板前端铰接连接第一拉杆和第二拉杆,第二拉杆后端连接第三拉杆,第三拉杆的端部与支架铰接连接,在第一拉杆的上端部连接短杆,短杆穿过滑槽后连接第一滑块,第一滑块通过直线滑动的方式安装在滑块导轨上;弹簧固定销轴和第一拉杆之间设置弹簧;通过弹跳触发部分实现蓄能后的弹跳。本发明是一种可行走及弹跳机器人,既发挥了弹跳式行走的优势,也采用了轮式行走的方式,避免了弹跳机器人转向不灵活的现象,同时也可在平地快速移动。
权利要求
1.行走及弹跳机器人,其特征在于,包括固定部分、行走及弹跳执行部分、蓄能部分和弹跳触发部分,
所述固定部分是用来安装其他部分的支架(100),所述其他部分包括行走及弹跳执行部分、蓄能部分和弹跳触发部分,所述支架(100)包括左部分(110)、中部分(120)和右部分(130),且结构相同的左、右两部分关于中部分对称设置,
所述左部分(110)前半部两侧的侧壁上设置第一圆孔(114)、第二圆孔(115)和滑槽(116),其中第一圆孔(114)、第二圆孔(115)和滑槽(116)自上而下布置,所述滑槽(116)自前向后方向设置,在前半部的内腔中设置有与滑槽同方向设置的滑块导轨(1110),
中部分(120)两侧与左、右部分的后半部进行固定连接,在中部分和左、右部分之间形成一个安装空间,
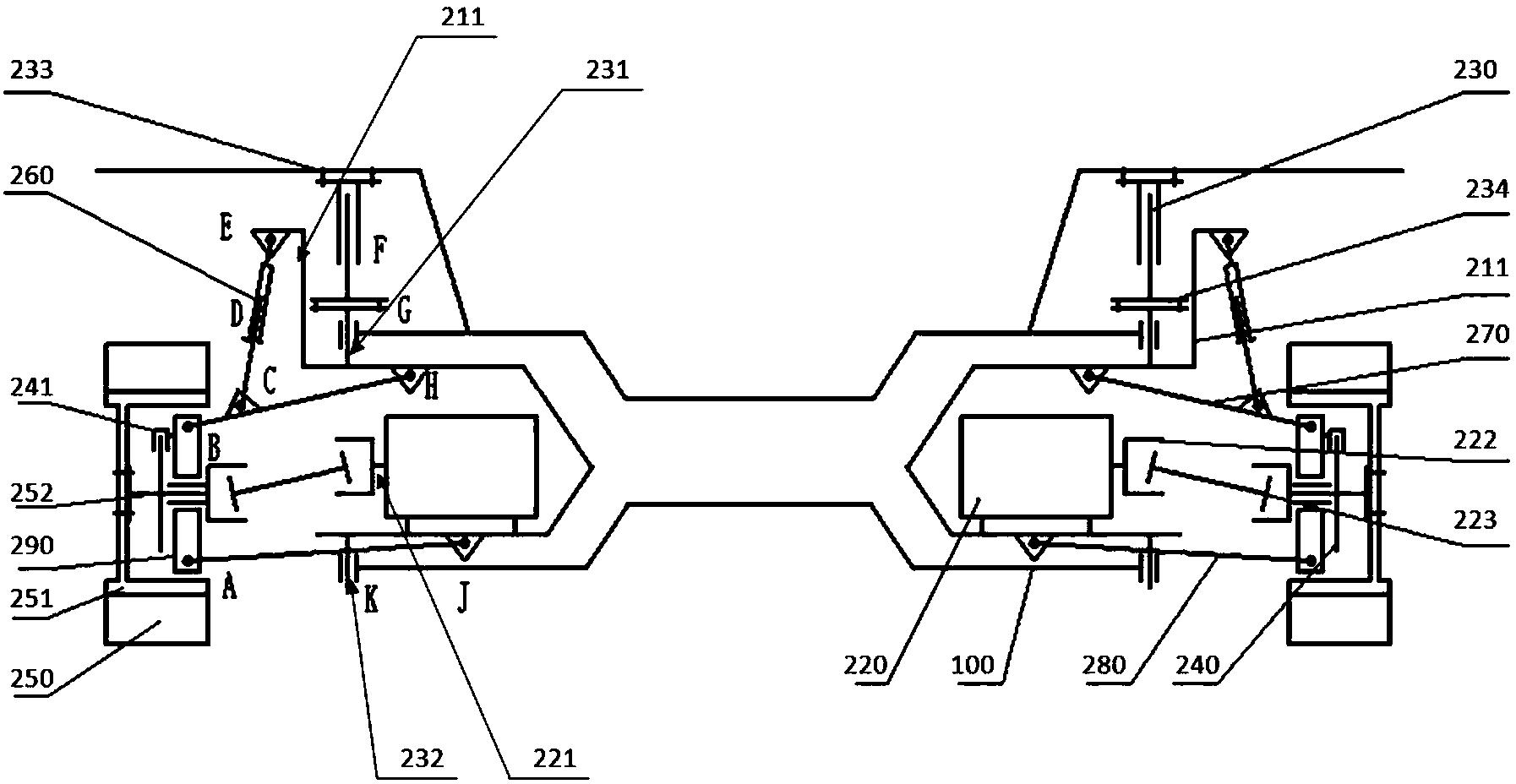
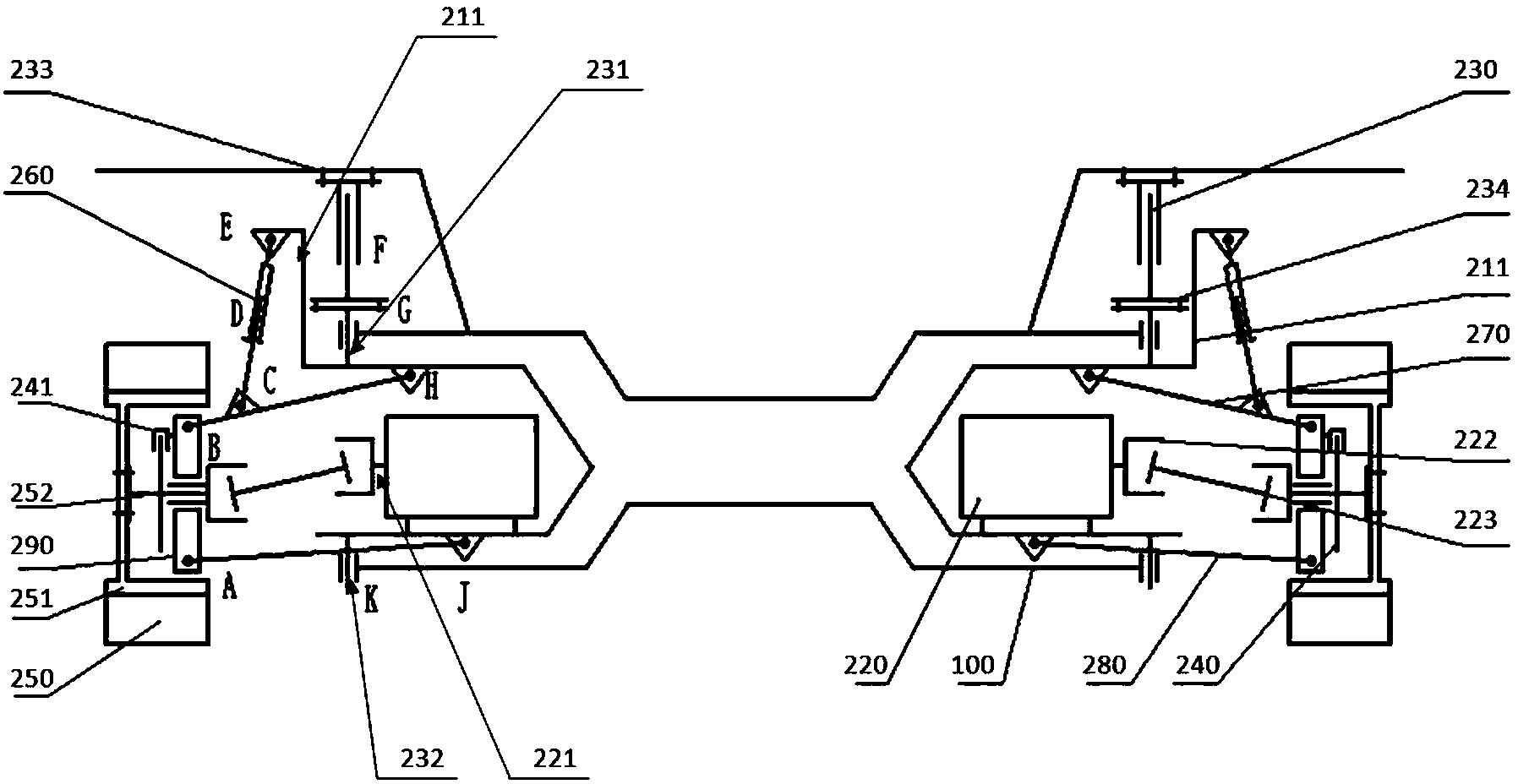
所述行走及弹跳执行部分包括底板、第一拉杆(220)、第二拉杆(230)、第三拉杆(240)和第一滑块,其中,所述底板(210)前端铰接连接第一拉杆(220)和第二拉杆(230),所述第二拉杆(230)后端通过弹簧固定销轴铰接连接第三拉杆(240),所述第三拉杆(240)的端部与支架进行铰接连接,所述第一拉杆(220)具有一个向上折弯的折弯部(221),在第一拉杆(220)的上端部通过活动连接的方式连接一个短杆(222),所述短杆(222)穿过滑槽(116)后连接第一滑块(250),所述第一滑块(250)中具有一个圆孔,所述第一滑块通过直线滑动的方式安装在滑块导轨(1110)上;
在弹簧固定销轴和第一拉杆的折弯部之间设置一弹簧(260);且:
当,第一滑块(250)处于滑块导轨(1110)前端时,弹簧(260)处拉伸状态,且第二拉杆(230)和底板(210)处于重合状态;
当,第一滑块(250)处于滑块导轨(1110)后端时,弹簧(260)处于自然收缩状态,第二拉杆(230)和底板(210)分离;
在底板的内部固定一个驱动电机(280),驱动电机(280)的动力输出轴水平向外设置,且在动力输出轴上固定一个车轮(270);
所述蓄能部分包括蓄电池(310)、电机(320)、分速器(350)、锥齿轮组(330)和连杆滑块组件(340),电机(320)通过分速器(350)、锥齿轮组(330)将动力输出至左、右两部分上的连杆滑块组件(340)上,所述连杆滑块组件(340)结构相同且关于支架中心对称设置,所述连杆滑块组件(340)包括第一连杆(341)、第二连杆(342)、第三连杆(343)和第二滑块(344),所述第一连杆341)一端与锥齿轮组(330)输出轴活动连接,另一端与所述第二连杆(342)铰接,所述第三连杆(343)为L型杆件,两端分别与第二连杆和第二滑块(344)连接;
所述弹跳触发部分包括动力传递杆件组(410)、触发块(420)、阻件(430)和舵机(440),所述舵机的动力输出轴连接所述动力传递杆件组(410),在所述动力传递杆件组(410)上设置有所述触发块(420),在触发块(420)上设有阻挡阻件(430)的三角形块,所述阻件(430)与所述第二圆孔(115)活动连接。
2.根据权利要求1所述的行走及弹跳机器人,其特征在于,所述动力传递杆件组(410)由第一杆件(411)、第二杆件(412)和第三杆件(413)组成,所述第一杆件(411)和第二杆件(412)结构相同,且在第一、第二杆件的两端分别设置有圆孔,所述第一杆件(411)一端的圆孔与舵机的输出轴连接,第一杆件另一端与第二杆件(412)的圆孔通过销连接,所述第二杆件(412)的另一端通过销与第三杆件(413)连接,所述第三杆件(413)为一长方形长杆,在第三杆件(413)朝向支架的一面上设置多个垂直的圆柱结构,圆柱结构用来与触发块(420)连接。
3.根据权利要求2所述的行走及弹跳机器人,其特征在于,在触发块(420)上设置有两个圆孔,其中一个圆孔用来与第三杆件(413)上的圆柱结构连接,另一个圆孔通过销活动连接在支架上的第一圆孔(114)上,并通过第三杆件(413)带动。
4.根据权利要求3所述的行走及弹跳机器人,其特征在于,所述阻件(430)由中间的圆环部(432)和分别与圆环部相切的阻挡部(431)和触发部(433)组成,且阻挡部(431)的长方形块结构要长于触发部(433)的长方形块结构。
5.根据权利要求1所述的行走及弹跳机器人,其特征在于,在支架上设置镂空(113)。
6.根据权利要求1所述的行走及弹跳机器人,其特征在于,在底板的后端固定一个牛眼万向轮(212),朝向地面设置。
7.根据权利要求1所述的行走及弹跳机器人,其特征在于,所述第一圆孔(114)和第二圆孔(115)为多个,且沿滑槽(116)长度方向设置。
8.根据权利要求1所述的行走及弹跳机器人,其特征在于,所述左部分(110)后半部外侧壁上设置有舵机动力轴的输出口(117),在后半部上壁和后壁上设置有动作避让槽(118),以及在上壁上设置有容锥齿轮传动轴输出的第三圆孔(119)。
说明书
技术领域
该发明涉及一种机器人,具体的说是一种可行走及弹跳机器人,属于机器人技术领域。
背景技术
机器人是自动执行工作的机器装置,它既可以接受人的控制,又可以运行预先编制的程序,也有可以根据以人工智能技术制定的原则行动,他的任务是协助或者取代人类的工作,例如生产业、建筑业,或者危险的工作,机器人是高级的,整合控制论、机械电子、机算机、材料和仿生学的产物。目前在工业、医学、农业甚至军事等领域中等均有重要的用途,其中越来越多的机器人用于军事、医学和工业。机器人代替人工完成工作,在一些抢险救援的现场,利用机器人可以提高工作的效率,保障救援人员的安全性。
移动机器人当前应用日益广泛,而其面临的环境也更加恶劣,诸如考古探测、星际探索、军事侦察以及反恐活动等领域中都期望机器人代替人发挥作用。这些场合地势复杂,存在各种障碍物,要求机器人具有很强的自主运动能力。当前机器人的主要运动方式,如多轮驱动以及仿生爬行或步行方式在有障碍环境下满足不了实际需要,而弹跳机构动作控制简单,可以越过数倍甚至数十倍与自身尺寸的障碍物,适合于多障碍物的环境,弹跳运动可以充分利用这一点,完成高效的运动。
发明内容
为了解决现有技术的不足,本发明提供一种可行走及弹跳机器人,首要解决的技术问题是在运行空间狭窄、高度有限的复杂地形中,机器人行走不便,次要技术问题是在平地时弹跳不稳定以及运行速度太慢。
本发明解决其技术问题所采用的技术方案为:
行走及弹跳机器人,其特征在于,包括固定部分、行走及弹跳执行部分、蓄能部分和弹跳触发部分,
所述固定部分是用来安装其他部件的支架,所述支架包括左部分、中部分和右部分,且结构相同的左、右两部分关于中间部分对称设置,
所述左部分前半部两侧的侧壁上设置第一圆孔、第二圆孔和滑槽,其中第一圆孔、第二圆孔和滑槽自上而下布置,所述滑槽自前向后方向设置,在前半部的内腔中设置有与滑槽同方向设置的滑块导轨,
中部分两侧与左、右部分的后半部进行固定连接,在中部分和左、右部分之间形成一个安装空间,
所述行走及弹跳执行部分包括底板、第一拉杆、第二拉杆、第三拉杆和第一滑块,其中,所述底板前端铰接连接第一拉杆和第二拉杆,所述第二拉杆后端通过弹簧固定销轴铰接连接第三拉杆,所述第三拉杆的端部与支架进行铰接连接,所述第一拉杆具有一个向上折弯的折弯部,在第一拉杆的上端部分别通过活动连接的方式连接一个短杆,所述短杆穿过滑槽后连接第一滑块,所述第一滑块中具有一个圆孔,通过直线滑动的方式安装在滑块导轨上;
在弹簧固定销轴和第一拉杆的折弯部之间设置一弹簧;且:
当,第一滑块处于滑块导轨前端时,弹簧处拉伸状态,且第二拉杆和底板处于重合状态;
当,第一滑块处于滑块导轨后端时,弹簧处于自然收缩状态,第二拉杆和底板分离;
在底板的内部固定一个驱动电机,驱动电机的动力输出轴水平向外设置,且在动力输出轴上固定一个车轮;
所述蓄能部分包括蓄电池、电机、分速器、锥齿轮组和连杆滑块组件,电机通过分速器、锥齿轮组将动力输出至左、右两部分上的连杆滑块组件上,所述连杆滑块组件结构相同且关于支架中心对称设置,所述连杆滑块组件包括第一连杆、第二连杆、第三连杆和第二滑块,所述第一连杆一端与锥齿轮组输出轴活动连接,另一端与所述第二连杆铰接,所述第三连杆为L型杆件,两端分别与第二连杆和第二滑块连接;
所述弹跳触发部分包括动力传递杆件组、触发块、阻件和舵机,所述舵机的动力输出轴连接所述动力传递杆件组,在所述动力传递杆件组上设置有所述触发块,在触发块的上设有阻挡阻件的三角形块,所述阻件与所述第二圆孔活动连接。
进一步地,所述动力传递杆件组由第一杆件、第二杆件和第三杆件组成,所述第一杆件和第二杆件结构相同,且在杆件的两端分别设置有圆孔,所述第一杆件一端的圆孔与舵机的输出轴连接,另一端与第二杆件的圆孔通过销连接,所述第二杆件的另一端通过销与第三杆件连接,所述第三杆件为一长方形长杆,在第三杆件朝向支架的一面上设置多个有垂直的圆柱结构,圆柱结构用来与触发块连接。
进一步地,在触发块上设置有两个圆孔,其中一个圆孔用来与第三杆件上的圆柱结构连接,另一个圆孔通过销活动链接在支架上的第一圆孔上,并通过第三杆件带动。
进一步地,所述阻件由中间的圆环部和分别与圆环部相切的阻挡部和触发部组成,且阻挡部的长方形块结构要长于触发部的长方形块结构。
进一步地,在支架上设置镂空。
进一步地,在底板的后端固定一个牛眼万向轮,朝向底面设置。
进一步地,所述第一圆孔和第二圆孔为多个,且沿滑槽长度方向设置。在所述安装空间外侧覆盖外壳。
进一步地,所述左部分后半部外侧壁上设置有舵机动力轴的输出口,在后半部上壁和后壁上设置有动作避让槽,以及在上壁上设置有容锥齿轮传动轴输出的第三圆孔。
本发明的有益效果是:
本发明是一种可行走及弹跳机器人,既发挥了弹跳式行走的优势,也采用了轮式行走的方式,避免了弹跳机器人转向不灵活的现象,同时也可在平地快速移动,对于机器人的躲藏起到做较好的作用,降低了弹跳机器人运行环境的要求。本发明的可行走及弹跳机器人,实现间歇式的跳跃,只要电机和电能满足,跳跃能力强,持续运行时间久,对于运行中能量转换有一定的收集作用。可用于军事、抢险救援、勘探等,因其独特的运动方式,也可用于玩具,激发孩子们对于机器人的兴趣。
附图说明
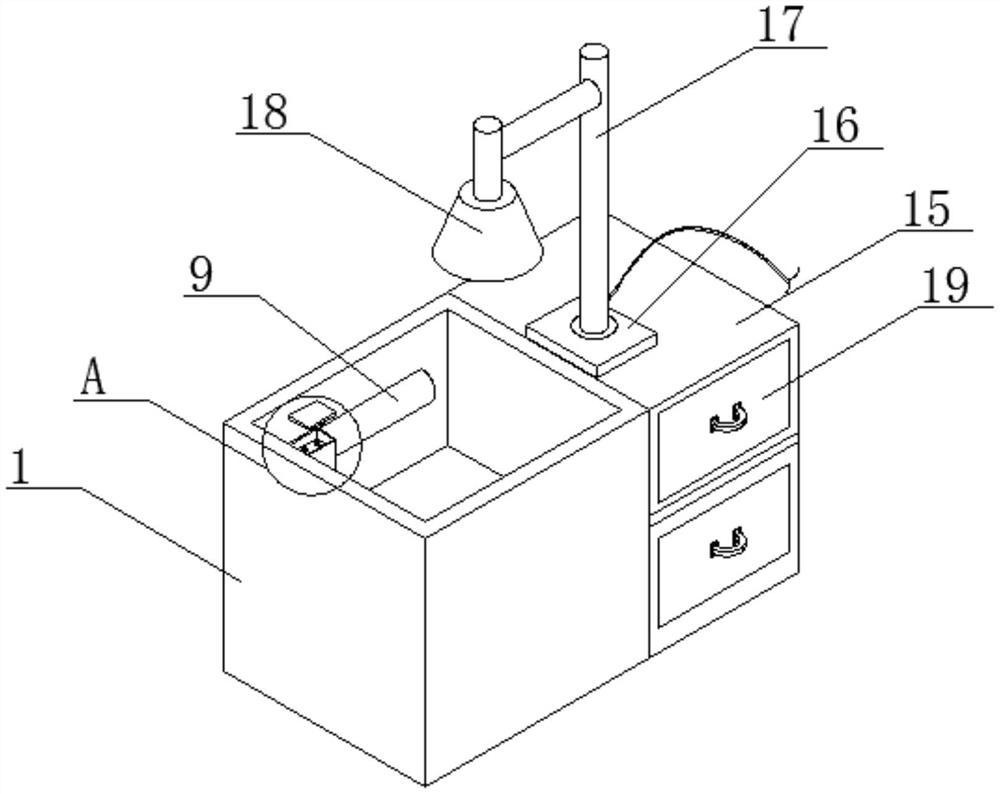
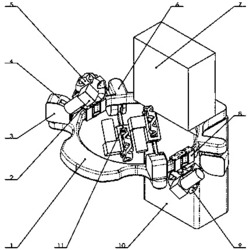
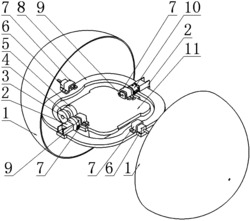
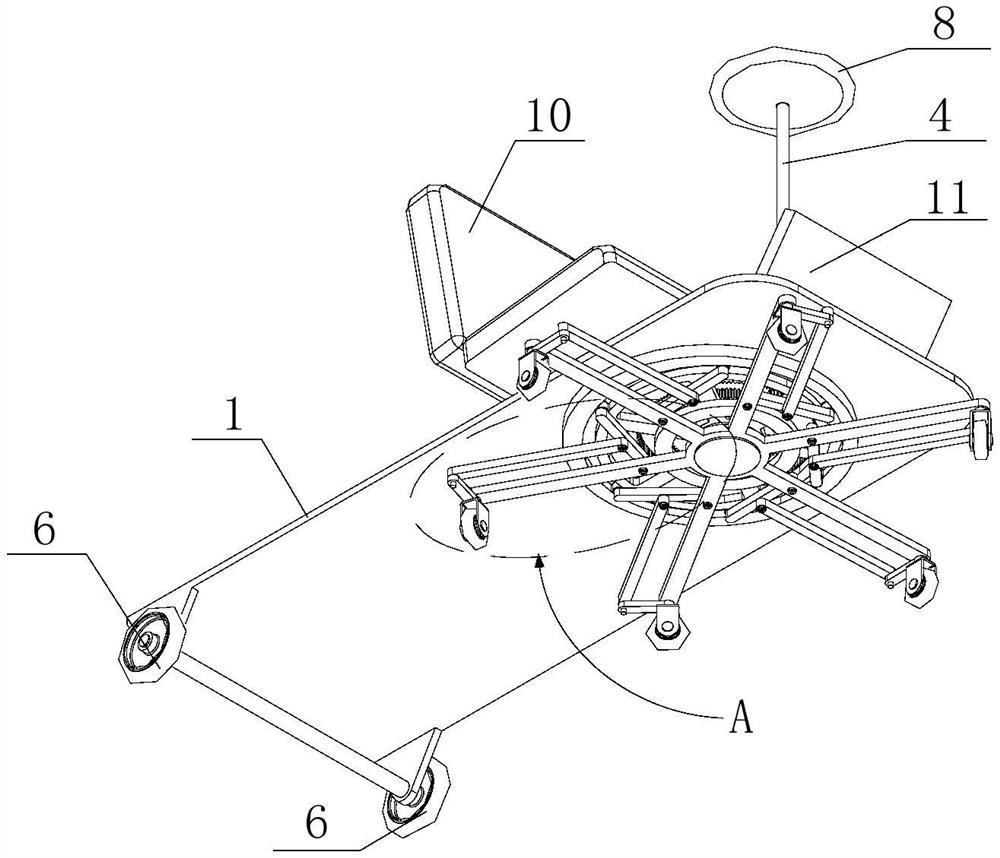
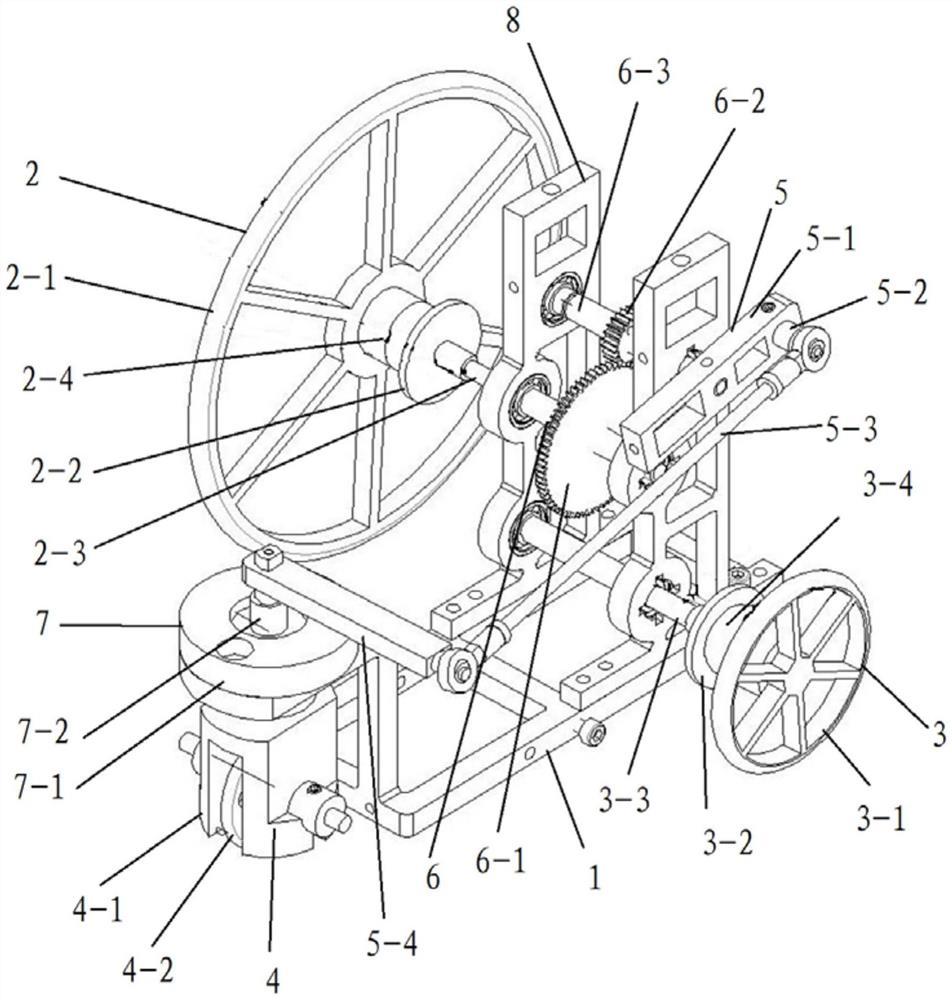
图1为本发明的立体结构示意图。
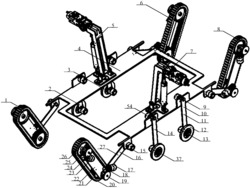
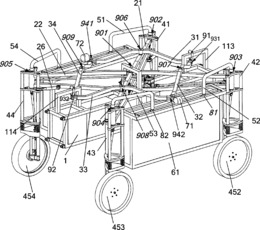
图2为本发明的内部结构示意图。
图3为本发明支架的结构示意图。
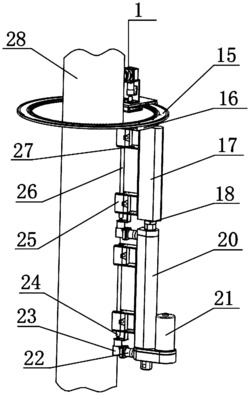
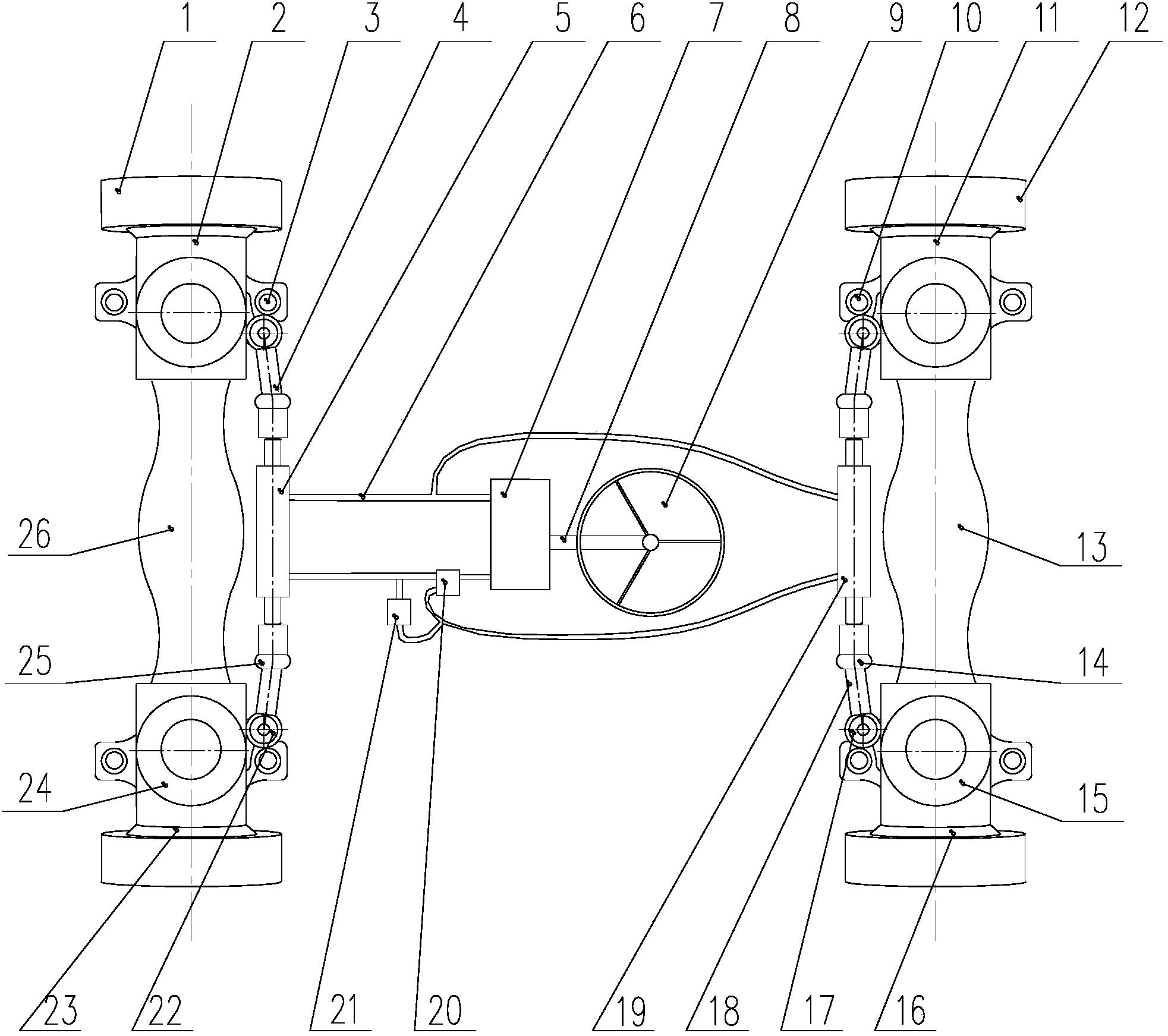
图4为本发明的侧视图之一。
图5为本发明连杆滑块组件的结构示意图。
图6为本发明滑块连接处的结构示意图。
图7为本发明动力传递杆件组的结构示意图。
图8为本发明的侧视图之二。
图9为图8中I的局部放大图。
图10为图9中滑块被阻件阻挡时的示意图。
图11为图10中滑块被释放时的示意图。
图12为本发明滑块所能到达的位置与弹跳高度关系的柱状图。
图中:100-支架,110-左部分,111-前壁,112-侧壁,113-镂空,113’-镂空,113”-镂空,114-第一圆孔,115-第二圆孔,116-滑槽,117-舵机动力轴输出口,118-动作避让槽,119-第三圆孔,1110-滑块导轨,120-中部分,130-右部分,140-外壳,
210-底板,211-销孔,212-牛眼万向轮,220-第一拉杆,221-折弯部,222-短杆,230-第二拉杆,240-第三拉杆,250-第一滑块,260-弹簧,270-车轮,280-驱动电机,
310-蓄电池,320-电机,330-锥齿轮组,340-连杆滑块组件,341-第一连杆,342-第二连杆,343-第三连杆,344-第二滑块,350-分速器,360-竖直杆,
410-动力传递杆件组,411-第一杆件,412-第二杆件,413-第三杆件,420-触发块,430-阻件,431-阻挡部,432-圆环部,433-触发部,440-舵机。
具体实施方式
本发明是一种可行走及弹跳机器人,具有适应性强、跳跃能力强、持续运行时间久以及应用范围广等优点。
如图1-图12,本发明的一种可行走及弹跳机器人,包括固定部分、行走及弹跳执行部分、蓄能部分和弹跳触发部分。
所述固定部分包括支架100和外壳140,是用来安装其他功能部件的,作为一个承载的载体,整体上看,支架100分为左部分110、中部分120和右部分130三部分,框架结构,其中,左右两部分关于中间部分对称设置,且结构相同,参考图3。固定部分,为减轻机器人的整体自重,优先采用铝合金钣金件、工程塑料件等轻质材料制作。
左部分110,前半部为一个长方体状,镂空113,镂空的存在可以在保证强度的前提下减轻自重,前半部是由前壁111和两侧的侧壁112组成的,其中两侧的侧壁相对设置,在两侧的侧壁上分别设置有成对设置的第一圆孔114、第二圆孔115和滑槽116,其中第一圆孔114、第二圆孔115和滑槽116自上而下布置,第一圆孔114和第二圆孔115为系列孔,多个,沿滑槽116长度方向设置。滑槽116自前向后方向设置。第一圆孔114用来安装触发块420,第二圆孔115用来安装阻件430,滑槽116用来安装短杆222。在前半部的内腔中设置有一个和滑槽同方向设置的滑块导轨1110,滑块导轨1110在内腔中居中设置,用来和第一滑块250配合并提供导向作用。
左部分110,后半部为一个长方体状,镂空113’,镂空的存在可以在保证强度的前提下减轻自重。后半部是由六个面组成的框架结构,在后半部的外侧壁上设置有一个舵机动力轴的输出口117,在上壁和后壁上设置有第三连杆343的动作避让槽118,以及在上壁上设置有容锥齿轮传动轴输出的第三圆孔119。
中部分120是由一个水平板和一个竖直板组成的L形框架结构,镂空113”,镂空的存在可以在保证强度的前提下减轻自重。中部分的左右两侧与左、右部分的后半部进行焊接、或者其它方式的固定连接,形成一体,在中部分和左、右部分之间形成一个安装电机、蓄电池、舵机等部件的空间,通过在外侧覆盖外壳140,对其中的电机、蓄电池、舵机等部件进行封装,形成安装部。
所述行走及弹跳执行部分具有行走与弹跳的双重功能。可以执行行走动作和弹跳动作。
所述底板210为长板,在底板的前端设置有两个销孔211,通过圆销分别铰接的连接第一拉杆220和第二拉杆230,其中第二拉杆230后侧通过弹簧固定销轴铰接连接第三拉杆240,第三拉杆240的另一端与支架的左部分或者右部分进行铰接连接。第一拉杆220具有一个向上折弯的折弯部221,在第一拉杆220的上端部分别通过活动连接的方式连接一个短杆222,其中,两个短杆222对称设置,分别穿过滑槽116,之后固定在一个第一滑块250上。第一滑块250中具有一个圆孔,通过直线滑动的方式安装在滑块导轨1110上。
在弹簧固定销轴和第一拉杆的折弯部之间设置一弹簧260。弹簧的作用在于:
当,第一滑块250处于滑块导轨1110前端时,弹簧260处拉伸状态,且第二拉杆230和底板210处于重合状态,参考图4;
当,第一滑块250处于滑块导轨1110后端时,弹簧260处于自然收缩状态,第二拉杆230和底板210分离;
当第一滑块250由滑块导轨1110前端向后端快速滑动时,通过第一拉杆220、底板210、第二拉杆230和第三拉杆240的形变,完成跳跃动作,其中,由于第一、第二拉杆分别与底板铰接,且在底板前端上配置有车轮270、驱动电机280等较重部件,所以在起跳过程中,起跳的作用点主要集中在底板前端,防止起跳过程中的倾覆。
在底板的后端固定一个牛眼万向轮212,朝向底面设置,形成后支撑。
在底板的内部靠近前端固定一个驱动电机280,驱动电机280的动力输出轴水平向外设置,且在动力输出轴上固定一个车轮270。
所述蓄能部分包括蓄电池310、电机320、分速器350、锥齿轮组330和连杆滑块组件340。电机320通过分速器350、锥齿轮组330后将动力输出至支架左、右两部分的所述连杆滑块组件340上,所述连杆滑块组件340结构相同且关于支架中心对称设置,所以在此以作用在支架右部分中的连杆滑块组件为例进行详细说明,另一部分则不做赘述。
所述蓄电池310、电机320和分速器350安装在支架的中部分120上,通过联轴器与输出轴连接,用来提供动力。
所述锥齿轮组330为动力传递装置,安装在支架的内部,锥齿轮组330中的水平放置的锥齿轮与分速器350的输出轴连接,竖直放置的锥齿轮则连接一竖直杆360,锥齿轮的转动则带动竖直杆360的转动,当然,也可用其他的动力传递装置。
所述连杆滑块组件340是用连杆和滑块来实现转动和移动相互转换的平面连杆组件,所述连杆滑块组件包括第一连杆341、第二连杆342、第三连杆343和第二滑块344,参考图5。
所述第一连杆341水平放置,一端与竖直杆360活动连接,可做除第一连杆341与第二连杆342重合位置至左右各10°的角度外,其他角度的旋转。
所述第二连杆342也为水平放置,比第一连杆341长10-20厘米,第二连杆342一端与第一连杆341的另一端铰接,通过第一连杆341的转动带动第二连杆342运动,第二连杆342的另一端与第三连杆343的一端铰接。
所述第三连杆343为一段长杆和一段短杆通过焊接形成的L型杆件,短杆为竖直方向放置,与第二连杆342连接,长杆为水平方向放置,穿过支架的前半部,且平行于滑块导轨1110,并与第二滑块344固定连接。
所述第二滑块344固定在第三连杆343上,由第三连杆343带动,起到推动第一滑块250的作用,利用第二滑块344将第一滑块250推至滑块导轨1110的最前端,然后第三连杆343和第二滑块344一起撤回,第一滑块250则通过阻件430阻挡,停留在滑块导轨1110最前端,完成蓄能。
所述弹跳触发部分包括动力传递杆件组410、触发块420、阻件430和舵机440。
所述舵机440内有电机、电路板和减速齿轮,通过减速齿轮进行减速,然后将动力输出,经减速齿轮减速后输出的速度小,可有效控制动力传递杆件组410。所述舵机的动力输出轴向外放置,并与第一杆件411连接。
所述动力传递杆件组410是由第一杆件411、第二杆件412和第三杆件413组成,参考图7,所述第一杆件411和第二杆件412结构相同,且在杆件的两端分别设置有圆孔,第一杆件411一端的圆孔与舵机的输出轴连接,另一端与第二杆件412的圆孔通过销连接,同样,第二杆件412的另一端通过销与第三杆件413连接。所述第三杆件413为一长方形长杆,在第三杆件413朝向支架的一面上设置多个有垂直的圆柱结构,圆柱结构用来与触发块420连接,且圆柱结构的数量与触发块的数量对应,并可随第三杆件413一起运动。
所述触发块420为一长方形块,有多个,在触发块420上设置有两个圆孔,其中一个圆孔用来与第三杆件413上的圆柱结构连接,另一个圆孔通过销活动链接在支架上的第一圆孔114上,并通过第三杆件413带动。在触发块420的右下角有一突出的三角形块,用来阻挡阻件430和触发弹跳部分。
所述阻件430固定在支架的第二圆孔115中,其中阻件430由中间的圆环部432和分别与圆环部相切的阻挡部431和触发部433组成,所述阻挡部431和触发部433均为一长方形块结构,且阻挡部431的长方形块结构要长于触发部433的长方形块结构,即阻挡部431的长方形块结构的自重要比触发部433的长方形块结构的自重要重,因此在自然状态下,由于受自重,阻挡部431与圆环部432相切且在圆环下方,触发部433与圆环部432相切且在圆环上方。
所述阻件430是与触发块420配合使用的,用来阻挡第一滑块250和释放第一滑块250的构件,阻件的工作过程:
当第一滑块250被第三连杆343和第二滑块344推至滑块导轨1110最前端时,弹簧260被拉伸,然后第三连杆343和第二滑块344将撤回,第一滑块250受到弹簧260的拉力也有要撤回的趋势,此时固定在第一滑块250上的短杆222将卡在阻件的阻挡部431处,即阻件430受第一滑块250向后滑动的力量转过一定角度,阻件的触发部433卡在触发块420右下角突出的三角形块上,此时阻件430不再转动,第一滑块250被阻件挡住,其他阻件仍处于自然状态,参考图10。
当动力传递杆件组410受舵机440控制进行运动时,触发块420受第三杆件413的带动将转过一定角度,此时被卡住的阻件将不再受触发块的阻挡,其他的阻件也没有阻挡作用,参考图11,即第一滑块250将快速滑至导轨1110的后端,在弹簧260的作用下,整个装置会跳起,即完成弹跳工作。
设置多个阻件和触发块的作用:
在弹跳作业完成后,整个装置落地,依靠机器人自重惯性,第一滑块250会再次向滑块导轨1110前端滑行,但若没有外力的施加,第一滑块将不会滑至滑块导轨的最前端,在第一滑块滑至前端与后端之间的某一位置时,都将会有阻件将其阻挡,完成蓄能工作;对应的,也会有触发块使阻件的阻挡作用消失,触发机器人的弹跳功能。
当电动机转动,通过输出轴将动力送至锥齿轮组330,通过锥齿轮组330齿轮的啮合
本发明的工作过程:
安有蓄电池310和电机320,通过电机320转动,由联轴器与输出轴连接,将动力传递给锥齿轮组330,通过两齿轮的啮合,将水平方向轴的转动转化为竖直方向轴的转动,并将动力传递给连杆滑块组件340。连杆滑块组件340中的第一连杆341同竖直杆360一起转动,通过铰接的方式带动第二连杆342,然后由第二连杆342带动第三连杆343,使第三连杆343做直线运动,第三连杆343与第二滑块344固定连接,从而使第二滑块344推动第一滑块250沿滑块导轨1110运动至滑块导轨1110的最前端,固定在第一滑块250上的短杆222带动第一拉杆220运动,从而使弹簧260拉伸,此时撤回第三连杆343和第二滑块344,因阻件430转过一定角度并受触发块突出三角形块的阻挡,阻止第一滑块250撤回,即完成蓄能工作。
控制舵机440,可使第三杆件带动触发块转动,使阻件的阻挡作用消失,在弹簧260的作用下,整个装置会跳起,当再次落地时,可通过机器人的自重惯性及利用蓄能装置,再次完成蓄能工作。
在平地时,控制行走部分的电机240会驱动车轮220转动,当控制两个车轮的电机速度不同时,就会实现差速转系,完成行走及转向。
上面所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域相关技术人员对本发明的各种变形和改进,均应扩如本发明权利要求书所确定的保护范围内。
行走及弹跳机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0