








专利摘要
一种旋转磁场和磁梯度双重推进的泳动微机器人及其驱动装置和方法,涉及微机器人及其驱动技术领域。本发明是为了解决现有微机器人驱动方式单一、适应环境单一的问题。本发明所述的泳动微机器人,具有圆柱形头部和柔顺鞭毛尾部,圆柱形头部内腔包含一径向磁化的圆柱形磁铁。本发明所述的泳动微机器人的驱动装置,包括三对正交放置的线圈,通过切换线圈之间的连接方式,控制每对线圈所通电流的方向,可以产生均匀磁场或梯度磁场。泳动微机器人的驱动方法,利用旋转磁场的旋转频率和磁场梯度的大小,改变泳动微机器人的运动速度,利用旋转磁场的旋转轴向个梯度的方向,改变泳动微机器人的运动方向。本发明适用于医疗、微系统等微机器人应用领域。
权利要求
1.一种旋转磁场和磁梯度双重推进的泳动微机器人,其特征在于,所述泳动微机器人包括:壳体(1)、圆柱磁铁(2)和柔顺鞭毛(3);
壳体(1)为含有空心内腔的圆柱形结构,柔顺鞭毛(3)的一端固定在壳体(1)一个端面的中心,壳体(1)的中心轴线与柔顺鞭毛(3)的中心轴线重合,
圆柱磁铁(2)位于壳体(1)的空心内腔内部,且圆柱磁铁(2)的中心轴线与壳体(1)的中心轴线相互垂直,
圆柱磁铁(2)的磁化方向为径向。
2.根据权利要求1所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,其特征在于,圆柱磁铁(2)的材料为钕铁硼,直径为3mm,高度为1.5mm。
3.根据权利要求1所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,其特征在于,壳体(1)包括:部件一和部件二,
部件一和部件二呈轴对称结构,对称轴为壳体(1)的中心轴线,部件一和部件二能够通过连接件相互分离或紧扣。
4.根据权利要求1所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,其特征在于,壳体(1)的材料为光敏树脂,壳体(1)的直径为5mm,高度为6mm。
5.根据权利要求1所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,其特征在于,壳体(1)的空心内腔呈圆柱形,且该空心内腔的中轴线与圆柱磁铁(2)的中轴线相互平行,该空心内腔直径为3.2mm,长度为1.7mm。
6.根据权利要求3所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,其特征在于,连接件为固定在部件一上的四个圆柱体,部件二上对应于四个圆柱体的位置设有四个圆孔,四个圆柱体分别与四个圆孔一一对应并能够嵌入在圆孔内。
7.权利要求1所述的泳动微机器人的驱动装置,其特征在于,该驱动装置包括:三组线圈对和三个驱动单元;
每组线圈对均包括两个完全相同且同轴设置的线圈,两个线圈之间留有空隙,三组线圈对的中心轴线两两正交设置,
每个驱动单元均包括:直流电源模块、数字/模拟转换模块、线圈驱动器和线圈连接切换模块;
直流电源模块用于为线圈驱动器提供电源,数字/模拟转换模块的模拟信号输出端连接线圈驱动器的信号输入端,线圈驱动器的驱动信号输出端连接线圈连接切换模块的驱动信号输入端,
三组线圈对分别与三个驱动单元一一对应,且驱动单元的线圈连接切换模块用于切换每对线圈之间的连接方式。
8.根据权利要求7所述的泳动微机器人的驱动装置,其特征在于,泳动微机器人位于装满工作液体的容器内,且位于三对线圈对的中心。
9.根据权利要求7所述的泳动微机器人的驱动装置,其特征在于,线圈对为亥姆霍兹线圈对。
10.权利要求1所述的泳动微机器人的驱动方法,其特征在于,该方法为:
对泳动微机器人施加旋转磁场和磁场梯度,
利用旋转磁场的旋转频率和磁场梯度的大小,改变泳动微机器人的运动速度,
利用旋转磁场的旋转轴向个梯度的方向,改变泳动微机器人的运动方向。
说明书
技术领域
本发明属于微机器人及其驱动技术领域。
背景技术
随着微纳米科学技术的不断发展,以及人们对医疗、微系统需求的增加,微机器人近年来得到了广泛的关注和快速的发展。对于微机器人,尺寸一般都在几微米至几毫米之间,可在较狭小的空间内工作,完成各种各样宏观机器人难以完成的任务要求。目前,国内外提出的各种泳动微机器人,驱动方式比较单一,所适应的环境也比较单一。
发明内容
本发明是为了解决现有微机器人驱动方式单一、适应环境单一的问题,现提供一种旋转磁场和磁梯度双重推进的泳动微机器人及其驱动装置和方法。
一种旋转磁场和磁梯度双重推进的泳动微机器人,所述泳动微机器人包括:壳体1、圆柱磁铁2和柔顺鞭毛3;
壳体1为含有空心内腔的圆柱形结构,柔顺鞭毛3的一端固定在壳体1一个端面的中心,壳体1的中心轴线与柔顺鞭毛3的中心轴线重合,
圆柱磁铁2位于壳体1的空心内腔内部,且圆柱磁铁2的中心轴线与壳体1的中心轴线相互垂直,
圆柱磁铁2的磁化方向为径向。
上述泳动微机器人,圆柱磁铁2的材料为钕铁硼,直径为3mm,高度为1.5mm。
上述泳动微机器人,壳体1包括:部件一和部件二,
部件一和部件二呈轴对称结构,对称轴为壳体1的中心轴线,部件一和部件二能够通过连接件相互分离或紧扣。
上述泳动微机器人,壳体1的材料为光敏树脂,壳体1的直径为5mm,高度为6mm。
上述泳动微机器人,壳体1的空心内腔呈圆柱形,且该空心内腔的中轴线与圆柱磁铁2的中轴线相互平行,该空心内腔直径为3.2mm,长度为1.7mm。
上述泳动微机器人,连接件为固定在部件一上的四个圆柱体,部件二上对应于四个圆柱体的位置设有四个圆孔,四个圆柱体分别与四个圆孔一一对应并能够嵌入在圆孔内。
上述泳动微机器人的驱动装置,该驱动装置包括:三组线圈对和三个驱动单元;
每组线圈对均包括两个完全相同且同轴设置的线圈,两个线圈之间留有空隙,三组线圈对的中心轴线两两正交设置,
每个驱动单元均包括:直流电源模块、数字/模拟转换模块、线圈驱动器和线圈连接切换模块;
直流电源模块用于为线圈驱动器提供电源,数字/模拟转换模块的模拟信号输出端连接线圈驱动器的信号输入端,线圈驱动器的驱动信号输出端连接线圈连接切换模块的驱动信号输入端,
三组线圈对分别与三个驱动单元一一对应,且驱动单元的线圈连接切换模块用于切换每对线圈之间的连接方式。
上述泳动微机器人的驱动装置,泳动微机器人位于装满工作液体的容器内,且位于三对线圈对的中心。
上述泳动微机器人的驱动装置,线圈对为亥姆霍兹线圈对。
上述泳动微机器人的驱动方法,该方法为:
对泳动微机器人施加旋转磁场和磁场梯度,
利用旋转磁场的旋转频率和磁场梯度的大小,改变泳动微机器人的运动速度,
利用旋转磁场的旋转轴向个梯度的方向,改变泳动微机器人的运动方向。
本发明所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,具有圆柱形头部和柔顺鞭毛尾部,圆柱形头部内腔包含一径向磁化的圆柱形磁铁。在外加磁场的作用下,圆柱形磁铁可以在头部内腔体自由转动,从而使磁铁磁化方向和外磁场方向一致。当外部施加旋转磁场时,泳动微机器人会由柔顺鞭毛的弯曲变形,产生推进力推动机器人旋转向前运动;当外部施加梯度磁场时,机器人会在磁梯度的驱动下,沿磁场梯度的方向向前运动。
本发明所述的一种旋转磁场和磁梯度双重推进的泳动微机器人的驱动装置,包括三对正交放置的线圈,通过切换线圈之间的连接方式,控制每对线圈所通电流的方向,可以产生均匀磁场或梯度磁场。通过改变旋转磁场的旋转频率,可以改变机器人的运动速度;也可通过改变磁场梯度大小,可以改变机器人的运动速度。通过改变旋转磁场的旋转轴向或者磁场梯度方向,可以改变机器人的运动方向。
本发明所述的一种旋转磁场和磁梯度双重推进的泳动微机器人及其驱动装置和方法,驱动方式灵活,适用于医疗、微系统等微机器人应用领域。
附图说明
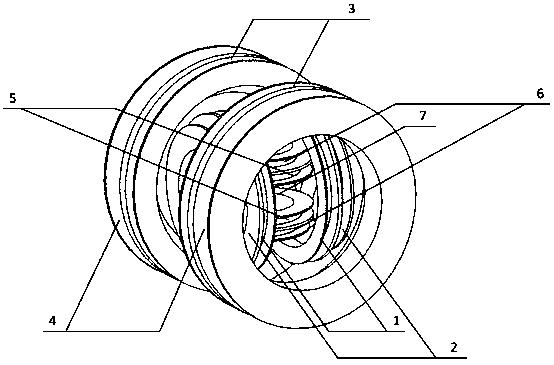
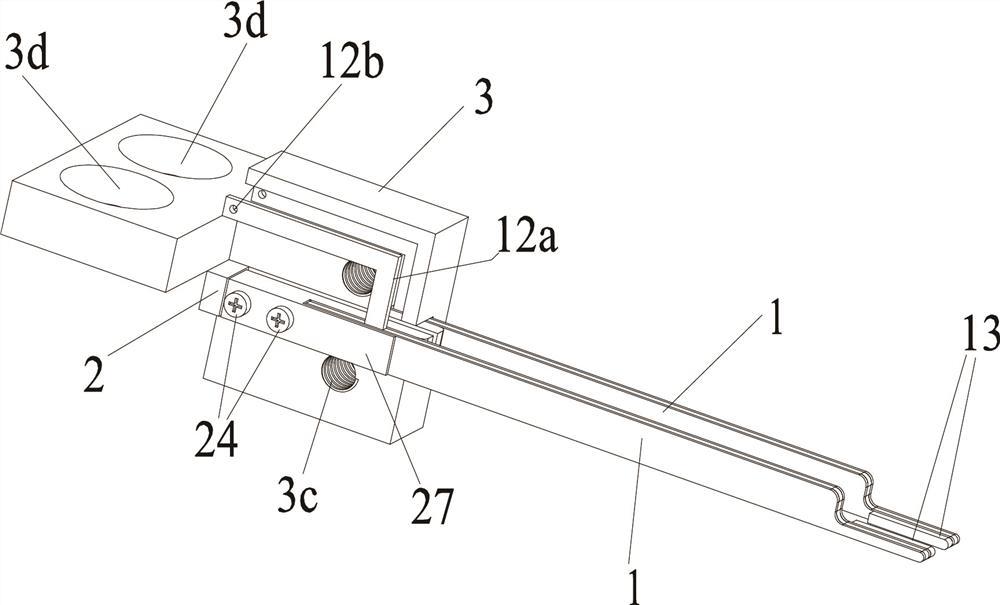
图1为具体实施方式一所述的一种旋转磁场和磁梯度双重推进的泳动微机器人的分解状态示意图;
图2为具体实施方式一所述的一种旋转磁场和磁梯度双重推进的泳动微机器人的组合状态示意图;
图3是泳动微机器人在旋转磁场驱动下的形态示意图,v表示运动前进方向;
图4是泳动微机器人在磁梯度驱动下的形态示意图,v表示运动前进方向;
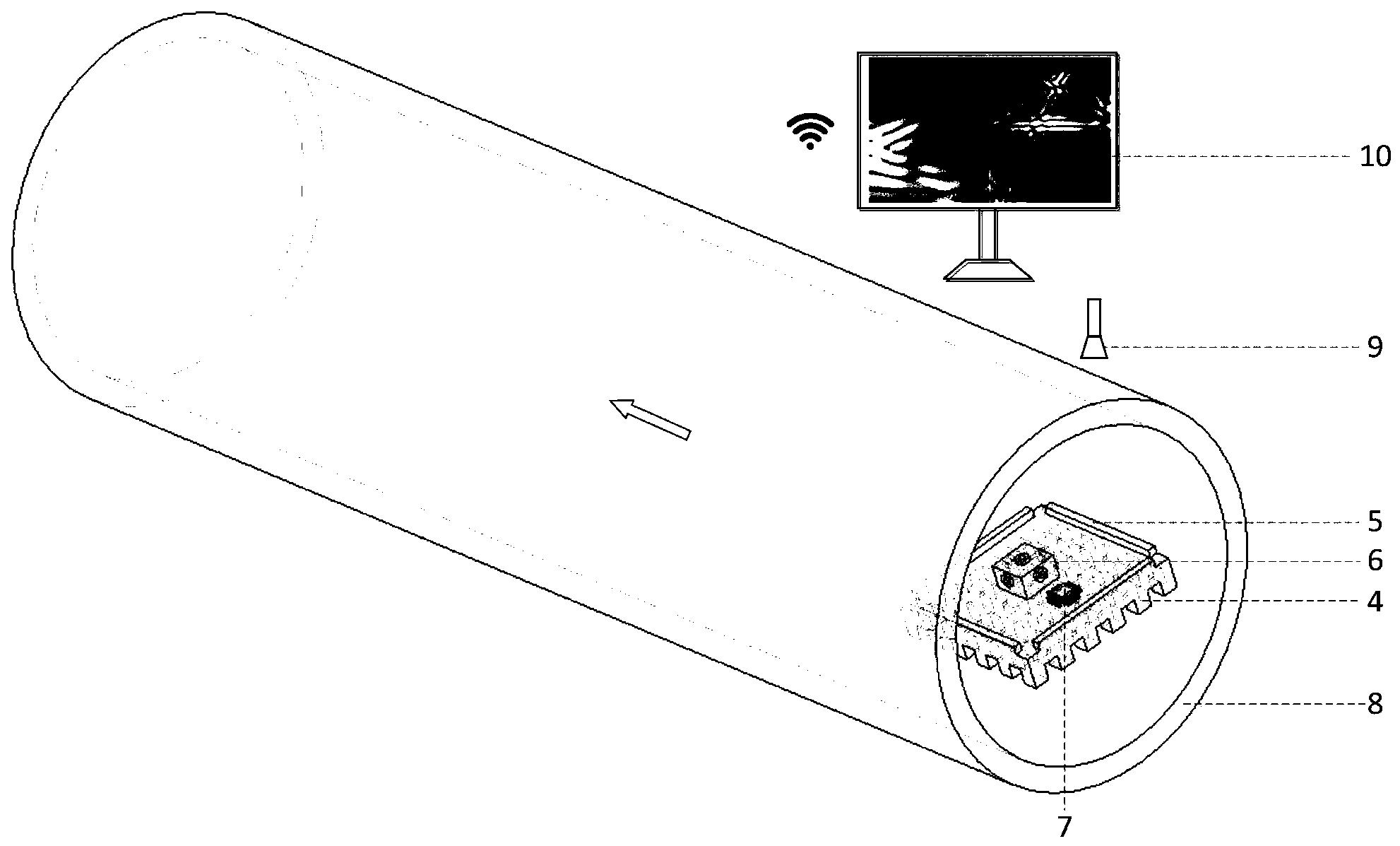
图5为具体实施方式七所述的驱动装置中三组线圈对的结构示意图;
图6是旋转场和磁梯度双重推进微机器人的驱动装置分别在旋转场和磁梯度对应的两种电流方向示意图,其中表示R线圈半径,i表示电流方向;
图7是具体实施方式七所述的驱动装置中三个驱动单元的驱动原理图。
具体实施方式
具体实施方式一:参照图1和图2具体说明本实施方式,本实施方式所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,所述泳动微机器人包括:壳体1、圆柱磁铁2和柔顺鞭毛3;
壳体1为含有空心内腔的圆柱形结构,柔顺鞭毛3的一端固定在壳体1一个端面的中心,壳体1的中心轴线与柔顺鞭毛3的中心轴线重合,
圆柱磁铁2位于壳体1的空心内腔内部,且圆柱磁铁2的中心轴线与壳体1的中心轴线相互垂直,
圆柱磁铁2的磁化方向为径向。
本实施方式所述的一种旋转磁场和磁梯度双重推进的泳动微机器人,具有圆柱形头部和柔顺鞭毛尾部,圆柱形头部内腔包含一径向磁化的圆柱形磁铁。在外加磁场的作用下,如图3所示,圆柱形磁铁可以在头部内腔体自由转动,从而使磁铁磁化方向和外磁场方向一致。当外部施加旋转磁场时,如图4所示,泳动微机器人会由柔顺鞭毛的弯曲变形,产生推进力推动机器人旋转向前运动;当外部施加梯度磁场时,机器人会在磁梯度的驱动下,沿磁场梯度的方向向前运动。
具体实施方式二:本实施方式是对具体实施方式一所述的一种旋转磁场和磁梯度双重推进的泳动微机器人作进一步说明,本实施方式中,圆柱磁铁2的材料为钕铁硼,直径为3mm,高度为1.5mm。
具体实施方式三:本实施方式是对具体实施方式一所述的一种旋转磁场和磁梯度双重推进的泳动微机器人作进一步说明,本实施方式中,壳体1包括:部件一和部件二,
部件一和部件二呈轴对称结构,对称轴为壳体1的中心轴线,部件一和部件二能够通过连接件相互分离或紧扣。
具体实施方式四:本实施方式是对具体实施方式一所述的一种旋转磁场和磁梯度双重推进的泳动微机器人作进一步说明,本实施方式中,壳体1的材料为光敏树脂,壳体1的直径为5mm,高度为6mm。
壳体1由3D打印加工而成。
具体实施方式五:本实施方式是对具体实施方式一所述的一种旋转磁场和磁梯度双重推进的泳动微机器人作进一步说明,本实施方式中,壳体1的空心内腔呈圆柱形,且该空心内腔的中轴线与圆柱磁铁2的中轴线相互平行,该空心内腔直径为3.2mm,长度为1.7mm。
具体实施方式六:本实施方式是对具体实施方式三所述的一种旋转磁场和磁梯度双重推进的泳动微机器人作进一步说明,本实施方式中,连接件为固定在部件一上的四个圆柱体,部件二上对应于四个圆柱体的位置设有四个圆孔,四个圆柱体分别与四个圆孔一一对应并能够嵌入在圆孔内。
具体实施方式七:参照图5和图7具体说明本实施方式,本实施方式为具体实施方式一至六任一实施方式所述的泳动微机器人的驱动装置,该驱动装置包括:三组线圈对和三个驱动单元;
每组线圈对均包括两个完全相同且同轴设置的线圈,两个线圈之间留有空隙,三组线圈对的中心轴线两两正交设置,
每个驱动单元均包括:直流电源模块、数字/模拟转换模块、线圈驱动器和线圈连接切换模块;
直流电源模块用于为线圈驱动器提供电源,数字/模拟转换模块的模拟信号输出端连接线圈驱动器的信号输入端,线圈驱动器的驱动信号输出端连接线圈连接切换模块的驱动信号输入端,
三组线圈对分别与三个驱动单元一一对应,且驱动单元的线圈连接切换模块用于切换每对线圈之间的连接方式。
线圈连接切换模块能够切换,同向串联还是反向串联,最终决定线圈是产生均匀旋转磁场还是磁场梯度。
本实施方式中,两个线圈之间的距离等于线圈的半径。
外磁场驱动装置为三对两两正交的线圈对,三对线圈对的轴向分别对应磁场发生系统的X、Y和Z轴,三对线圈的轴线的交点对应坐标原点O,如图5所示。进而三组线圈对也对应了三个轴的驱动单元,如图7所示。
每对线圈均可连接一个驱动单元作为可控直流源,每个线圈接线端子的正、负极分别与切换单元连接,切换单元与驱动器电流输出端的正、负极相连接。
具体实施方式八:本实施方式是对具体实施方式七所述的一种旋转磁场和磁梯度双重推进的泳动微机器人的驱动装置作进一步说明,本实施方式中,泳动微机器人位于装满工作液体的容器内,且位于三对线圈对的中心。
本实施方式中,优选地,泳动微机器人位于装满甘油的容器内,且位于三组线圈对的中心区域。
驱动装置中的每组线圈对通入同向电流时,构成亥姆霍兹线圈,可产生最大10mT的匀强磁场。通过控制驱动器输出电流的幅值、相位和频率,从而控制三对线圈中的电流,在三对线圈的中心附近产生幅值为8mT的旋转磁场。如图6所示,当产生均匀旋转磁场时,会驱动微机器人同步旋转,同时,柔顺鞭毛发生弯曲变形,产生推进力推动机器人向前运动,机器人运动速度与鞭毛的长度、横截面积、形状、鞭毛的倾斜角度、头部大小以及甘油浓度有关。
当每对线圈反向串联时,线圈中所通电流方向相反,在中心区域产生磁梯度,机器人头部内腔的圆柱磁铁会发生自由转动,顺着磁场方向,在磁梯度的驱动下,向前运动,机器人运动速度与磁梯度大小、头部大小以及甘油浓度有关系。
具体实施方式九:本实施方式是对具体实施方式七所述的一种旋转磁场和磁梯度双重推进的泳动微机器人的驱动装置作进一步说明,本实施方式中,线圈对为亥姆霍兹线圈对。
具体实施方式十:本实施方式为具体实施方式一、二或三所述的泳动微机器人的驱动方法,该方法为:
对泳动微机器人施加旋转磁场和磁场梯度,
利用旋转磁场的旋转频率和磁场梯度的大小,改变泳动微机器人的运动速度,
利用旋转磁场的旋转轴向个梯度的方向,改变泳动微机器人的运动方向。
当对泳动微机器人施加旋转磁场时,泳动微机器人是旋转式前进的,本实施方式中所述的运动速度为机器人前进的速度,对应的运动方向也是前进的方向。
当对泳动微机器人施加磁场梯度时,泳动微机器人是直线式前进的,本实施方式中所述的运动速度为机器人前进的速度,对应的运动方向也是前进的方向。
一种旋转磁场和磁梯度双重推进的泳动微机器人及其驱动装置和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0