

IPC分类号 : H02P6/28,H02P6/10,H02P21/00,H02P21/18,H02P21/22,G05B11/42





专利摘要
本发明公开了一种基于改进天牛须算法的无刷直流电机优化方法,包括以下步骤:步骤1,构建待优化的无刷直流电机转速、电流双闭环调速系统数学模型,并根据该模型在Matlab/Simulink中搭建无刷直流电机控制系统仿真模型;步骤2,建立天牛须算法的初始值和随机单位朝向,将天牛须算法迭代位置三维分解赋值于PID三个参数,设定改进天牛须算法中天牛更新原则和终止条件,利用改进天牛须算法获得电机最优控制参数。本发明通过采用改进天牛须算法优化无刷直流电机转速环PID三个控制参数,与原始天牛须算法和任意设定PID控制参数相比,电机调速控制系统具有良好的动、静态特性、转速响应快,抗干扰性强。
权利要求
1.一种基于改进天牛须算法的无刷直流电机优化方法,其特征在于,包括以下步骤:
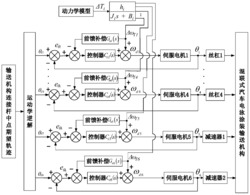
步骤1、构建无刷直流电机转速、电流双闭环调速系统的数学模型和无刷直流电机控制系统的仿真模型,所述仿真模型采用双闭环控制方式,其中电流环采用现有PID控制方法,而转速环采用改进天牛须算法优化PID控制方法;
步骤2、建立天牛须算法的初始值和随机单位朝向,设定改进天牛须算法中的天牛更新原则和终止条件,利用改进天牛须算法获得电机最优控制参数,并通过系统仿真,将系统产生误差带入适应度函数计算适应度值,利用该适应度值对天牛进行位置和朝向更新;
改进天牛须算法中,步长的计算方式按照如下进行:
其中:stepstart为初始权重值;stepend为结束迭代时权重值;t为当前迭代次数;Tmax为最大迭代次数。
2.根据权利要求1所述的一种基于改进天牛须算法的无刷直流电机优化方法,其特征在于,仿真模型为在Matlab/Simulink中搭建的仿真模型,所述步骤2中将天牛须算法迭代位置三维分解赋值于PID三个参数kp、ki、kd,并将前述的三个参数整合在一起作为一只“天牛”。
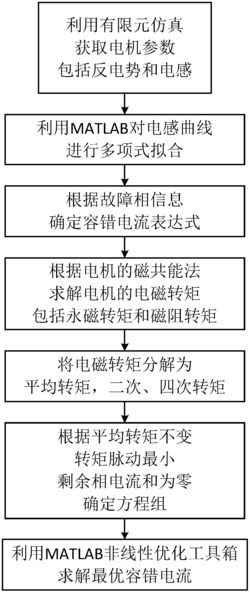
3.根据权利要求2所述的一种基于改进天牛须算法的无刷直流电机优化方法,其特征在于,改进天牛须算法对PID参数的优化步骤如下:
(1)天牛位置和天牛须朝向初始化,计算天牛左右须适应度值,确定天牛运动方向;
(2)更新天牛位置和朝向,计算此时左右须适应度值,确定下步天牛运动方向;
(3)根据BAS算法迭代得到的位置进行三维分解并依次赋值给PID三个参数kp、ki、kd,在Matlab/Simulink中对系统仿真,将系统产生误差带入适应度函数计算适应度值;
(4)将上步适应度值与设定最小适应值比较,若小于最小适应值或达到最大迭代次数,则迭代结束,得到最佳PID参数值,仿真结束;否则自第二步起重复执行后续步骤。
4.根据权利要求3所述的一种基于改进天牛须算法的无刷直流电机优化方法,其特征在于,天牛须算法的具体计算步骤包括:
S1、对于一个n维空间优化问题,确定左右须坐标xl、xr,质心坐标x,两须之间距离d0,步长step;
S2、天牛朝向任意,故右须指向左须的向量朝向也是任意的,产生一个随机向量dir=rand(n,1),对此归一化dir=dir/norm(dir),可得:
S3、对于待优化函数f,求取左右两须的值:Fleft=f(xl),Fright=f(xr),判断两个值大小;
其中:x
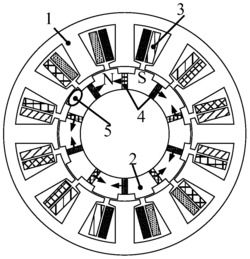
5.根据权利要求1所述的一种基于改进天牛须算法的无刷直流电机优化方法,其特征在于,步骤1中,无刷直流电机采用两相导通星形三相六状态控制系统,建立无刷直流电机数学模型,无刷直流轮毂电机定子电压平衡方程矩阵表达式可写为:
式中:ua、ub、uc分别指电机U、V、W三相的相电压;ia、ib、ic分别指U、V、W三相的相电流;ea、eb、ec分别指U、V、W三相的相反电动势,R为电机三相绕组上的电阻;Ls为绕组上的电感;M为每两相绕组之间的互感。
6.根据权利要求1所述的一种基于改进天牛须算法的无刷直流电机优化方法,其特征在于,步骤1中,电机电磁转矩表达式按照下列进行:
Te=(eaia+ebib+ecic)/w
式中:Te指电机电磁转矩;w指电机转动时的机械角速度。
7.根据权利要求1所述的一种基于改进天牛须算法的无刷直流电机优化方法,步骤1中,电机转子运动平衡方程式按照下列进行:
式中:TL指电机负载转矩;J指电机转子转动惯量;B指电机粘性摩擦系数。
8.根据权利要求2所述的一种基于改进天牛须算法的无刷直流电机优化方法,步骤1中,电机调速系统采用双闭环控制方式,PID控制方法的PID表达式按照下列进行:
式中:
一种基于改进天牛须算法的无刷直流电机优化方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0